GPS控制网的数据处理
gps控制网设计知识点

gps控制网设计知识点在现代社会中,全球定位系统(GPS)被广泛应用于导航、测绘、地理信息系统等领域。
而GPS控制网的设计是确保GPS精确度和可靠性的关键因素之一。
本文将介绍GPS控制网设计的重要知识点。
一、GPS控制网的定义和作用GPS控制网是由若干个控制点组成的网络,通过这些控制点精确测量GPS接收机的位置和钟差,以校正接收机的误差。
控制网的主要作用是提供准确的定位和时间参考,以及监控和维护GPS系统的性能。
二、控制网的基本要素1. 控制点:控制点是控制网的基础,通常选取在地理分布广泛、稳定性好的位置。
控制点的坐标和钟差必须经过准确的测量和计算。
2. 基线:基线是连接两个控制点的线段,在GPS测量中起到传输观测数据的作用。
基线的长度和方向确定了控制点之间的相对位置。
3. 接收机:接收机是用来接收并解算来自卫星的信号,并计算出接收机所在位置和钟差的设备。
接收机的选择应考虑其型号、品牌和技术性能。
4. 天线:天线用于接收卫星信号,并将信号传输给接收机。
天线的性能和安装对GPS测量精度有重要影响。
三、控制网的设计流程1. 控制点选定:根据工程需求和测量要求,选择控制点的数量和分布。
控制点应覆盖整个测区,同时考虑到地形、遮挡物和精度要求等因素。
2. 基线设计:通过测量和数据处理,确定各控制点之间的基线长度和方向。
基线的选择应满足工程测量的要求,尽量在控制网中形成三角形或四边形的网络结构。
3. 接收机配置:根据基线长度和精度要求,考虑接收机的品牌、型号和数量。
合理配置接收机,以提高测量效率和精度。
4. 观测和数据处理:根据设计好的网络,进行测量观测,获取控制点的坐标和钟差。
利用数据处理软件进行数据编辑、平差和精度评定等步骤,得到最终结果。
四、控制网的精度控制控制网设计中,精度控制是确保测量成果满足要求的重要环节。
精度控制的关键是合理选择控制点和基线,以及采用适当的观测策略和数据处理方法。
1. 控制点精度:控制点的精度要求取决于工程测量的精度要求和控制网的布设方式。
GPS数据处理教程
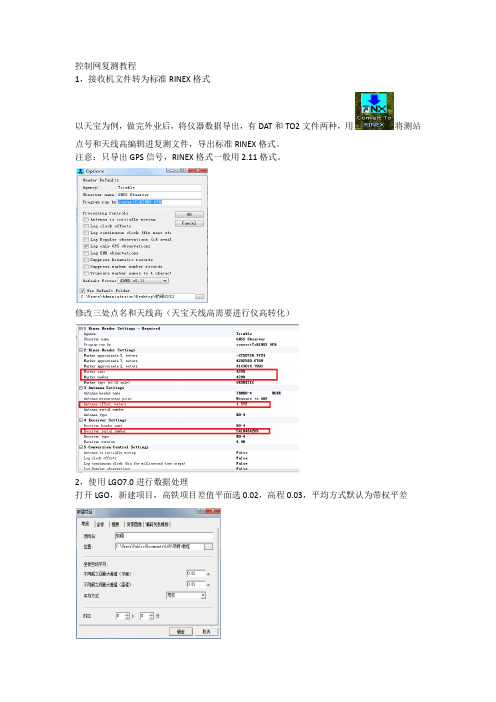
控制网复测教程1,接收机文件转为标准RINEX格式以天宝为例,做完外业后,将仪器数据导出,有DAT和TO2文件两种,用将测站点号和天线高编辑进复测文件,导出标准RINEX格式。
注意:只导出GPS信号,RINEX格式一般用2.11格式。
修改三处点名和天线高(天宝天线高需要进行仪高转化)2,使用LGO7.0进行数据处理打开LGO,新建项目,高铁项目差值平面选0.02,高程0.03,平均方式默认为带权平差导入标准RINEX文件,选中项目然后点击分配,数据导入完成。
开窗剔除无用的卫星信号,信号中断、时间较短均可删除(此步骤后期处理还会用到)。
卫星条界面右键选择处理参数,按图将处理参数勾选将所有卫星信号选中,右键修改处理模式为自动,右键处理,查看处理结果,右键点击存储。
在查看/编辑界面查看超限点位(点位标识为方框而非三角),双击点查看平均界面,可查看哪个点解算该点位超限。
根据超限提示,返回GPS处理界面利用手动处理模式,右键选择参考站和流动站(以谁解谁的问题,可以互换,两个点位不允许存在相互解算情况)修改该基线处理参数,处理参数可改的有卫星高度截至角(15-25)、频率(L1,L2,L1+L2,消除电离层)、活动的卫星这三项,确定后选择处理该基线,回到查看编辑。
有时候也可以修改解算方向,删掉该基线。
反复修改上述参数,直到全部点位没有超限值,信号特别差的控制网允许存在一两处超限不大的点位(LGO平差方式与一般软件稍有区别)。
利用LGO平差界面进行平差,空白处右键分别进行预分析、网平差计算、计算闭合环查看网平差结果要求T、F检验接受,对于T检验超限的基线进行单基线处理。
有时候T检验不通过仍能平差通过,与平差标准有关,不好处理的基线可以试着带病平差下。
部分基线比较差,可以查看卫星星历(右键分析),将周跳较大时间数据删除或者修改参数。
数据处理完成,输出菜单导出ASCII基线数据,注意设置文件类型一定为基线。
3,利用铁四院平差软件进行平差在铁四院平差项目里面新建项目,选择椭球参数和控制网等级,导入基线数据,依次进行独立闭合环、三边闭合环、重复基线差、三维无约束平差和二维约束平差,要求所得文件均无超限数据即可。
GPS控制网平差总结报告

GPS控制网平差总结报告GPS控制网是指由一组GPS基准站组成的网络,用于测量和控制大范围区域内的GPS定位精度。
GPS控制网平差是对GPS观测数据进行处理和分析,得到每个GPS站点的坐标和高程的过程。
该报告对GPS控制网平差的基本原理、流程以及常用的算法进行了总结。
报告首先介绍了GPS控制网平差的基本原理。
GPS观测数据包括卫星观测值和接收机历元数据,可以通过基线解算得到不同站点之间的相对位置关系。
基于这些相对位置关系,可以通过平差方法计算出每个站点的绝对坐标和高程。
报告还列举了常用的GPS控制网平差算法。
最常用的算法包括最小二乘法、加权最小二乘法和区域平差法。
最小二乘法通过最小化观测值与模型预测值之间的残差来求解平差参数。
加权最小二乘法则考虑观测数据的权重,将不同类型的数据进行加权处理。
区域平差法则将整个控制网分成若干个区域,分别进行平差计算,再通过闭合差控制各个区域之间的一致性。
最后,报告总结了GPS控制网平差的应用和挑战。
GPS控制网平差在地理测量、地质灾害监测和测绘工程等领域具有重要应用价值。
然而,由于GPS观测数据本身存在误差和不确定性,平差算法和数据处理过程中需要考虑到这些因素,以提高平差结果的准确性和可靠性。
综上所述,GPS控制网平差是一种重要的测量和控制技术,可以用于获取大范围区域内的GPS定位精度。
通过了解GPS控制网平差的基本原理、流程和常用算法,可以更好地应用该技术解决实际问题。
然而,在实际应用中仍然需要不断改进算法和数据处理方法,以提高平差结果的精度和可靠性。
三级GPS大地控制网数据处理的改进与优化

do s n o s e o u i n o a n d by Th r Or e ne u i g l o e r s l to bt i e id— d rGPS Ge d tc Ne wo k d t r c s i nd s a i n newo k o e i t r a a p o e sng a t to t r da a t .The i r v ie n c i c de c fr s lswa s u s d. Mi i mp o en nti o n i n e o e u t sdic s e n mum u vaur rd i e p l to t o c r t e g i nt r o a i n me h d we e us d t a c l t o io t lv l c t i l r e o c l u a e h rz n a e o iy fe d,o fwhi h t e r s t r e t rc mp rn t he me ho f c h e ulswe e b te o a i g wih t t d o
Ch n Yo x a ¨ e ng i ng
,
Me gJe Ta in o Wa gQ a g a dZ a gY n l ’ n i , i Ja b , n in n h n igi n
/ ) ia vs no uvyn n p ig X ’ n 7 0 5 \ 1 X ’ nDi i i o fS reiga dMapn , i a 10 4 \ ) D 1 6 , in 3 0 4 2 n0 p 6 3 5 T0 正 0 10 / Abs r c C u l g i h aa rcsigo hr— re SG o ei N t ok u i e du t n ta t o pi t ted t oe s f i O d r nw h p n T d GP e d t ew r , nf da js c i me t s i
泰顺县GPS基础控制网布设与数据处理
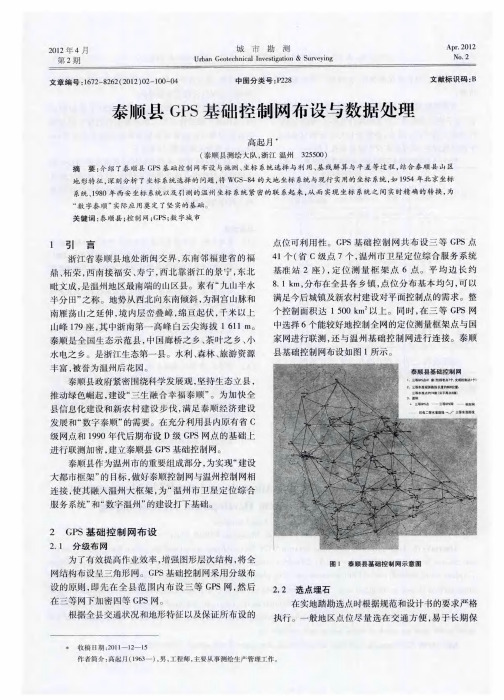
待 测 点 和 已知 点 连 成 一 个 整 网。共 观 测 1 1个 时 段 ,
G S控 制点 12站 次 , 均 重 复 上站 率 为 22, 于 三 P 0 平 . 高 等 平 均上 站率 t2的规 范要 求 。 >
4 数 据 处 理
4 1 坐 标 系统选 择 与利 用 .
42 基线 解算 . G S三 等 网基 线 解 算 采 用 美 国 Ti l T O .3 P r e G 10 mb 软 件 。综合 各 方 面 因素 相 应 取 舍 基 线 , 后 形成 全 测 最 区的基 线 网 , 在此 基础 上精 确处 理各 条基 线 , 基线 并 使
等 。
对 于泰顺 县典 型的 山区县 , 整个 控制 网的 △s不 可 能都满 足小于 25c / m的投影变 形 , . m k 有些 地 区严重 超 出规范要 求 。合理 的投影 基 准 和 中央 子 午线 成 为本 控 制 网的关 键 ,6个 乡镇高程分 布情 况如表 1 示 。 3 所
之用 。
4 3 平 差计 算 .
5 结
语
当所有基线 的同步环 、 异步环 、 重复边长等情况完
全 满 足规 范要 求 下进 行 G S网 的平 差计 算 , 差 软件 P 平 采 用 武汉 大 学科 傻 G S数 据处 理 系统 软 件 ( O A) P C S 进
行计算。
泰顺 县 G S基 础 控 制 网作 为今 后 “ 字 泰 顺 ” P 数 建 设 最基 础 的空 间框 架数 据 以及 工程测 量 、 下测 量 、 地 地
规 划 发展 , 为基 础 控 制 网也应 该 与温 州 控 制 网建 立 作
度 表 。采用 边连 接 和 网连 接相 结 合 的方 式 , 有 几 何 具 强度 大 和 辅 助 观 测 校 验 多 等 优 点 。 利 用 1 台 套 0 TI L R MB E系 列 的 双 频 G S接 收 机 ( P 4台 R — 3台 6 2,
GPS导航数据处理与精度控制技巧

GPS导航数据处理与精度控制技巧GPS(Global Positioning System)是一种广泛应用于导航、地理测量等领域的技术。
随着技术的不断进步,GPS导航的精度也在不断提高。
本文将从数据处理和精度控制两个方面探讨GPS导航的相关技巧。
一、数据处理技巧1. 数据收集与预处理GPS导航系统通过接收卫星信号获取位置、速度等数据,因此数据收集是首要步骤。
在收集数据之前,需确保设备正常工作,接收器位置周围没有遮挡物以保证信号质量。
此外,还需注意时间同步,以确保采集的数据能准确匹配。
在数据收集之后,预处理也是不可或缺的。
预处理是对收集到的原始数据进行校正和滤波等操作,以消除误差和噪声的影响。
常见的预处理方法包括差分处理和滤波处理。
2. 差分处理差分处理是通过接收两个或多个接收器的信号,并比较它们的差异来减小定位误差的一种方法。
差分GPS数据处理技术能够提高导航的精度,尤其适用于需要高精度定位的应用领域。
常见的差分处理方法包括实时差分和后处理差分。
实时差分是指在实时接收GPS信号时,通过与距离较远但位置固定的参考站进行比对,并利用差分数据进行校正。
后处理差分则是在离线状态下对收集到的数据进行处理,通常需要使用专业软件进行。
3. 滤波处理滤波处理是一种通过数学方法对GPS数据进行平滑处理的技术。
滤波的目的是去除数据中的噪声,减小误差对最终结果的影响。
常用的滤波方法有卡尔曼滤波和滑动窗口滤波。
卡尔曼滤波是一种递归滤波技术,它根据观测数据和状态模型的概率分布,在每个时刻对系统状态进行估计和更新。
滑动窗口滤波则是利用一个固定大小的窗口来进行滤波,保留最近一段时间内的数据来估计位置和速度。
二、精度控制技巧1. 选择合适的接收器接收器的性能直接影响导航的精度。
选择适合自己需求的接收器非常重要。
高精度的接收器通常具有更好的信号接收能力和数据处理能力,可以提供更准确的导航结果。
同时,还需考虑接收器的可靠性、功耗、支持的卫星系统等因素。
保证gps控制网质量的主要措施有
保证 GPS 控制网质量的主要措施有GPS 控制网质量是测绘、航空、地理信息等领域中非常关键的一项内容。
为了保证 GPS 控制网的质量,需要采取一些措施来进行有效的管理和监控,本文将介绍保证 GPS 控制网质量的主要措施。
1. 建立完整的监测系统为了保证 GPS 控制网的质量,需要建立完整的监测系统。
该系统应该包括 GPS 接收系统、数据处理系统、质量控制系统等多个部分。
GPS 接收系统是实时监测GPS 信号强度和卫星状态的关键环节;数据处理系统则负责数据传输与质量控制,确保数据的完整性和准确性;质量控制系统则负责对 GPS 数据进行分析、处理和统计,以检测 GPS 控制网的质量和性能。
同时,建立一个数据存储和备份系统也是很重要的,这样可以保证数据不会因为硬件或者软件故障而丢失。
2. 提高 GPS 接收机的性能当 GPS 接收机性能不足时,将会影响到 GPS 数据的质量和精度。
因此,提高GPS 接收机的性能也是保证 GPS 控制网质量的重要措施之一。
提高 GPS 接收机的性能可以从以下几个方面入手:•选择性能优异的 GPS 接收机,尽量避免选择低端产品;•安装 GPS 天线,以提升接收机的收信能力;•修改 GPS 接收机的软件设置,以达到最优的性能表现。
3. 优化数据处理算法GPS 控制网的精度和质量主要决定于数据采集和处理的精度。
因此,在优化数据处理算法方面,也可以有效地提升 GPS 控制网的质量。
•首先,要选择适当的数据处理软件,并且不断升级和优化软件功能;•其次,根据 GPS 数据的特点,比如卫星信道故障的随机性,数据处理程序需要加强容错性和纠错能力,以保证数据的准确性;•最后,需要进行数据质量的监测和分析,排除 GPS 数据异常值和偏差数据。
4. 采用网络控制技术GPS 控制网的精度和质量还与其网络传输质量有关。
由于 GPS 数据的采集和处理需要耗费大量的计算和网络传输资源,为了保障数据的及时性和准确性,需要采用网络控制技术,保证 GPS 数据传输和处理的可靠性和稳定性。
静态GPS数据处理流程
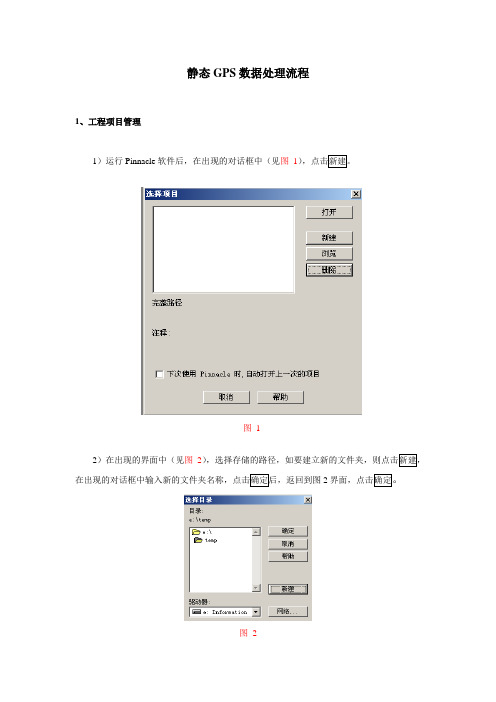
静态GPS数据处理流程1、工程项目管理1)运行Pinnacle软件后,在出现的对话框中(见图1)图 12)在出现的界面中(见图2)2图 23)在出现的界面中(见图3),输入项目名称,如:示例,建议使用项目名称进行管理,图34)在出现的对话框中(见图4)图 42、坐标系统编辑(此过程仅需编辑一次即可)1)在工具条上选择(坐标系统编辑器)图标。
(见图5)图 52框中(见图6),输入新建椭球名称:北京54,北京54椭球相关的参数:a=6378245 ,1/f=298.3,图63)选择基准面版,在出现的界面中(见图7)输入基准名称:北京54,并选择椭球名称为北京54图74图8)输入新建的平图85)在出现的界面中(见图9和图10)输入中央子午线的名称,如:111,基准名称选择建立好的北京54基准,投影方式选择即:TMERCTransverse mercator<simple zone>)图9图106)进入投影编辑界面(见图11),输入起始中央子午线:111,尺度比:1,E偏移值:500000图117)选择大地水准面面版,导入大地水准面模型:EGM963、原始数据的输入1)点击工具条上的(见图12)图122(见图13)图133)在出现的界面中(见图14),选择工具条上的图144)在出现的界面中(见图15),选择下载数据的路径,如:示例\NO1,按ctrl+A可以图155)在出现的界面中(见图16),选择工具条上的图166)导入数据后,将提示观测时段成功过滤、导入完成(见图17)令快捷键,关闭该对话框。
图17同样的方法将其他时段数据导入进来。
4、原始数据属性修改1)在原始数据栏中点击每个新任务前的“+”号,可以看到输入的原始数据,该原始(见图18)图182)在出现的界面中(见图19),参考外业手簿上的记录,进行观测数据属性设置,在名称一栏中:输入与真实点名相同的文件名称,如G4图193)在出现的界面中(见图20),名称栏输入实际点名如:G4个界面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章GPS控制网的数据处理☐主讲:周建郑☐黄河水利职业技术学院学习目标☐了解GPS测高及其数据处理,拟合法确定正常高程,GPS做三、四等水准加密,过河水准测量,变形监测。
☐理解星历预报的重要性,数据传输过程,基线向量的误差分析与判断。
☐掌握基线向量的解算,坐标系统的转换,GPS网平差。
数据处理目的:将采集的数据,经测量平差后,归化到参考椭球面上并投影到所采用的平面上,得到点的准确位置。
野外数据平差参考椭球面坐标投影当前参考面坐标本章知识点GPS定位数据 的预处理① GPS基线向量解算②GPS定位成果的 坐标系统转换④GPS基线网的平差计算③GPS网与地面网的联合平差⑤ GPS测高及其数据处理的过程⑥☐一、概述☐(一)GPS定位数据处理基本流程☐一、概述☐(二)GPS 定位数据处理特点特点(1)海量的数据(2)复杂的处理过程(3)多样的数学模型(4)自动化程度高☐一、概述☐(三)GPS数据的预处理预处理的主要目的是对原始观测数据进行编辑、加工与整理,剔除粗差,删除无效无用数据,分流出各种专用的信息文件,为下一步的平差计算做准备。
☐一、概述☐(三)GPS数据的预处理预处理工作的主要内容有:①数据传输②数据分流③平滑滤波检验④统一数据格式⑤标准化卫星轨道方程⑥探测周跳修复观测值⑦进行各种模型改正二、预处理的准备工作Ⅰ数据传输Ⅱ数据分流观测值文件星历参数文件电离层和UTC参数文件测站信息文件Ⅲ数据解码☐三、数据预处理的内容☐GPS数据预处理的目的是:☐对数据进行平滑滤波检验,剔除粗差;☐统一数据文件格式并将其加工成标准化文件,找出整周跳变点并进行修复,确定整周未知数的初值;☐对观测值进行各种模型改正。
第一节观测数据的预处理☐三、数据预处理的内容☐GPS 数据预处理的内容有:数据预处理标准化卫星钟差标准化卫星轨道方程标准化观测值文件建立钟差改正多项式相对论改正星钟多项式拟合记录格式记录类型与项目采样密度数据单位☐基本概念☐基线向量:☐GPS 相对定位中,点位间的相对位置量为基线向量。
☐基线长度:☐GPS 相对定位中,对应于两点间的长度称为基线长度。
☐GPS 相对定位的结果是确定测站点间的相对位置关系。
☐这种相对位置关系通常用空间直角坐标差或大地坐标差表示。
(,,)ij ij ij x y z ∆∆∆(,,)ij ij ij B L H ∆∆∆☐为了通过平差计算求解观测站之间的基线向量,一般均取相位观测值的线性组合,即差分模型。
☐这里以双差观测值作为平差解算时的观测量,以测站间的基线向量坐标为主要未知量,建立误差方程式、法方程求解基线向量。
()Tb x y z =∆∆∆,,☐一、误差方程的列立☐设在基线两端测站同步观测的卫星为和,并以为参考卫星,则可得到站星二次差分的观测方程式为:☐式中——站星距:经过一系列推导和初等变换可以得到下面纯量形式的误差方程:,i j 1k 2k 1k 1212121211221212()()()k k k k k k k k k k k k k k k k s s s s ij i i j i j ij ijf f f f t N c c c cρρε∆Φ=-∆+∆+∆-∆-∆-∆++111222121122121122k k k i jk k k i j k k k k k k ij i j i j k k k k k k ij i j i j N N N N N ρρρρρρεεεεε⎫∆=-⎪∆=-⎪⎪⎬=--+⎪⎪=--+⎪⎭ρ☐一、误差方程的列立☐式中:121212121212k k k k k k k k k k k k ijij ij ij ij ij ij ijijva xb yc z NWδδδδ=++++21121211221212121122121212112212*********k k k k jk k s i i i ijk k k k i j i jk k k k j j k k s i i ij k k k k i j i j k k k k j j k k s i i ij k k k k i j i j k k k k ij ij ij x f x x x a c y y f y y b c z z f z z c c W a x ρρρρρρρρρρρρ⎛⎫∆∆∆∆=+-- ⎪ ⎪⎝⎭⎛⎫∆∆∆∆=+-- ⎪ ⎪⎝⎭⎛⎫∆∆∆∆=+-- ⎪ ⎪⎝⎭=∆12121212000()k k k k k k k k ij ij ij ij ij ijb yc z N ⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪+∆+∆+-∆Φ⎭☐二、法方程的组成与解算☐上式为任一历元测站和卫星的双差观测值误差方程。
当历元两观测站同步观测的卫星为sv ,则可得到sv -1个误差方程,相应要引入sv -1个初始整周未知数,即历元共有(sv -1)+3个未知数。
如果两观测站对所有sv 个卫星进行了连续观测,其历元数为n ,则总共有m =n (sv -1)个误差方程,写成矩阵形式有:121212121212k k k k k k k k k k k k ijij ij ij ij ij ij ijijva xb yc z NWδδδδ=++++i t i j 、12k k 、i t☐二、法方程的组成与解算☐式中:V AX L=+12()TmV v v v=12112()()TsvTmX x y z N N NL W W Wδδδδδδ-==☐二、法方程的组成与解算☐设各类双差观测值等权且彼此独立,即权阵P 为单位阵,则可组成法方程:☐式中:☐于是可解得X 为:☐基线向量平差值为:V AX L=+NX B O+=N A AT=B A LT=11()()X N B A A A L -T-T=-=-0ij ij ij ij ij ij ij ij ij x x x y y y z z z δδδ⎫∆=∆+⎪⎪∆=∆+⎬⎪∆=∆+⎪⎭基线长度平差值为:整周未知数平差值为:222ij ij ijb x y z=∆+∆+∆0(121)i ii N N N i sv δ=+=- ,,,☐三、精度评定☐1、单位权中误差估值☐单位权中误差估值可由下式计算☐式中:022V PV V Vm m sv m sv TT==----()()V V AX L AX L T T=++L L B XT T=+☐三、精度评定☐2.平差值的精度估值☐未知数向量X 中任一分量的中误差估值为☐式中为未知数的权,可直接由法方程系数阵逆阵的对角元素求得。
01(122)i i iix x x x m m m Q i sv P ===+ ,,,i X P i x 1N -☐三、精度评定☐ 3.基线长度b 的精度估算222ij ij ij b x y z =∆+∆+∆将基线长度公式线性化得:0000ijijijij ij ijx y z b b x y z b b b δδδ∆∆∆=+++式中0202020()()()ij ij ij b x y z =∆+∆+∆则可得到基线长度的权函数式b f XδT=∆式中0000ijijijx y z f b b b T⎛⎫∆∆∆=⎪ ⎪⎝⎭()ijij ij X x y z δδδT∆=由协因数传播率即可得到b X Q f Q fδT∆=式中基线向量坐标未知数的协因数阵可由中取出,即:x ∆X Q ∆1N -ijij ij ij ij ij ijij ij ij ij ijij ijij xX y x z Xy x y y z z x z y z Q Q Q Q Q Q Q Q Q Q δδδδδδδδδδδδδδδ∆⎛⎫⎪ ⎪=⎪⎪⎝⎭则基线长度b 的中误差估值为0b bm m Q δ=基线长度相对中误差估值为br m m b=☐四、解算结果分析☐1、残差分析☐平差处理时,若存在系统误差和粗差,其结果将有偏差。
☐理论上,载波相位观测精度为1﹪周,即对L1 波段信号观测误差只有2mm。
☐因而当偶然误差达1cm时,应认为观测值质量存在较严重的问题;当系统误差达分米级时,应认为所用数学模型有误;当残差分布中出现突然的跳跃或尖峰时,则表明整周跳变处理失败。
☐观测残差分布合理与否主要体现在平差后的单位权中误差估值上,根据基线长度一般要求在0.05周以下,否则表明观测值中存在某些系统误差或粗差。
☐四、解算结果分析☐2、处理基线结果的精度☐(1)验后单位权方差检验。
☐采用检验法对验后单位权方差进行检验,是否与理论值相近。
☐(2)基线长度的精度。
☐要求处理后基线长度中误差应符合标称精度。
☐(3)双差固定解与双差实数解之间的差值。
☐理论上整周未知数N 为一整数,但其平差值为一实数,称为双差实数解。
☐将实数确定为整数,在进一步平差时不作为未知数求解,这样的结果称为双差固定解。
☐通常要求两者之间的基线向量坐标差小于5cm 。
当双差固定解与实数解的向量坐标差达到分米级时,则处理结果可能有误。
☐基线长度较长时,以双差实数解为最佳。
2☐四、解算结果分析☐3、粗差检测☐对GPS基线向量观测值的粗差检验和模型误差辨识,一般是利用由基线向量构成的多边形闭合差进行。
☐4、粗差定位☐当经过检验,认为GPS网中还存在粗差时,往往还需要确定粗差源来自哪些观测(组),该过程称为粗差定位。
☐每个基线向量观测值L1都是由三维坐标差构成的相关观测值,而各基线向量之间一般认为是独立的。
因此,从模式识别技术的观点看,粗差定位实质上是分析粗差向量落在哪些基线向量L1的系数矩阵A1所形成的特征子空间内的概率问题。
☐一、概述☐GPS基线网平差的目的:☐消除基线网中各类图形闭合条件的不符值,并建立网的基准,即网的位置、方向和尺度基准。
☐二、基线网按经典自由网平差☐1、误差方程设网中的固定点点号为1,网内测站点数为n ,以待定测站点坐标改正数()(23)T i i i i x x y z i n δδδδ== ,为平差未知数,以基线向量坐标T ij ijijij z y x x )(∆∆∆=∆及其方差的逆阵11(12)ij ij ij ij ijij ij ij ij ij ij ijij ij ij x x y x zij ijy x y y z z x z y z P D i j n σσσσσσσσσ-∆∆∆∆∆-∆∆∆∆∆∆∆∆∆∆⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦= ,,,1-ijD为观测值和权阵,并设固定点坐标和待定点近似坐标为:11110000()()(23)TT i i i i x x y z x x y z i n === ,,,☐二、基线网按经典自由网平差☐1、误差方程则对于任意两点有以下关系或含固定点的基线向量观测值据此可写出基线向量观测值的误差方程。