chapter3系统可靠性模型
03可靠性工程-可靠性模型
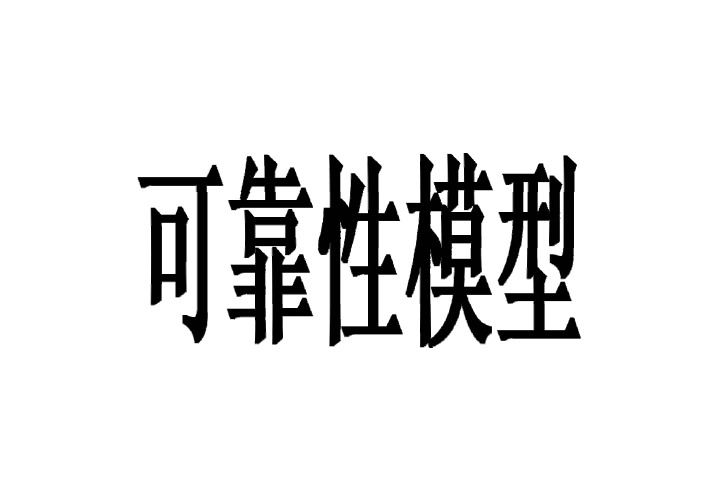
储存处现 指令
47
获取有效 载荷数据
48
发送有效载荷 或 和子系统数据
410
转到空间运
或
输系统轨道
(60)参考
接收指令 (全向)
46
获取子系统 状态数据
49
或
发送子系 统数据
411
时间分析-1
功能框图——静态(不随时间而变)
系统级的功能以及它们的子功能具有唯一的时间 基准(所有功能的执行时间一样长)
s(t)
e1t
1
e2t
2
e12t
12
e1t e2t e12t
11 1
TB CsF
0
Rs(t)dt1
2
12
并联模型
尽管单元故障率都是常数,但并联系统的故障率不 再是常数。
λ
λ1 λ λ1=λ2
λ
λ2
λs(t)λ2
λs(t)
t
t
并 联 模 型 故 障 率 曲 线
λ1 λs(t)
t
B3
B——系统故障 Bi——单元i故障 B=B1 ∩ B2∩B3
当个单元相互独立,系统不可靠度:
Fs tPB PB1 PB2 PB3 F1t F2t F3t
并联模型
系统可靠度
n
当系统各单元R 的S(寿t)命1分布 i1为1指数Ri(分t)布 时,对于最常
用的两单元并联系统,有
Rs(t)e1t e2t e(12)t
注意事项
模型描述的是各单元之间的可靠性逻辑关系
基本可靠性模型-任务可靠性模型
在进行设计时,根据要求同时建立基本可靠
性及任务可靠性模型的目的在于,需要在人 力、物力、费用和任务之间进行权衡。 设计者的责任就是要在不同的设计方案中利 用基本可靠性及任务可靠性模型进行权衡, 在一定的条件下得到最合理的设计方案。 为正确地建立系统的任务可靠性模型,必须 对系统的构成、原理、功能、接口等各方面 有深入的理解。
系统可靠性
( ) 2-6
) 可知, 2 - 6 ∰ 越大,∹ 由式 ( s 越大 。 实际上大多数情况 ∰= ,此时 2
2 2 ∹ 1-∹) ∹ -∹ =2 s = 1- (
( ) 2-7
第2章 系统可靠性、可用性模型
·2 5·
若各单元寿命为指数分布时,设各单元失效率相同均为λ, 则系 统可靠性、系统失效率、系统平均寿命分别为
图2 - 2 串联系统可靠性框图
若每个单元可靠性分别为 ∹ ∹ 1,…, ∰, 且诸单元互相独立 , 则 系统可靠性为
∰
∹ ∹ s= ∏ ∳
1 ∳ =
( ) 2-1
) ,…, ) , 则系统可靠 ˇ ˇ 若已知各单元失效率分别为λ λ 1 ( ∰ ( 性、系统失效率、系统平均寿命分别为 ) ∹ ˇ x =e p- s( ] ˋ) ˋ) d ˋ} 烌 +…+ λ( λ( {∫[ x d ˋ} =e - λ( p{ ∫ ˋ)
第2章 系统可靠性、可用性模型
·2 3·
2 1 2 典型系统可靠性模型 2 . 1 . 2 . 1 串联系统 由若干单元组成的系统, 只要有一个单元发生故障, 该系统就 发生故障,这样的系统就是可靠性串联系统。 显然,系统可靠性小于至多等于各单元可靠性最小值,即 { ∹ i n ∹ s≤m ∳} 式中 ∹ — —第∳个单元可靠性。 ∳— 串联系统可靠性框图如图2 - 2所示。
1 ) ˇ d ˇ= ∑ = ∹ θ s( s 0 λ ∳ ∬∳ = 表决系统有以下特殊情形:
∰
烍 烎
( ) 2-1 0
∫
) / 。 / 1 0 ∰ ( )系统,∹ 1 0 ∰= ) / / 2 ∰ ∰ ( )系 统 或 1 ∰ ( )系 统 等 价 于 ∰ 个 单 元 串 联 系 统,即
第三章 系统可靠性模型建立

功能的分解与分类 功能框图与功能流程图 时间分析 任务定义及故障判据
功能的分解与分类
功能的分解
系统往往是多任务与多功能的 一个系统及其功能是由许多分系统及其功能实现的 通过自上而下的功能分解过程,可以得到系统功能的层
次结构 功能的逐层分解可以细分到可以获得明确的技术要求的
为正确地建立系统的任务可靠性模型,必须对 系统的构成、原理、功能、接口等各方面有深 入的理解。
F18基本可靠性模型
F18任务可靠性模型
概述-可靠性逻辑关系
概述-建立系统任务 可靠性模型的程序
系统功能分析
对系统的构成、原理、功能、接口等各方面深 入的分析是建立正确的系统任务可靠性模型的 前导。
方框:产品或功能 逻辑关系:功能布局 连线:系统功能流程的方向
无向的连线意味着是双向的。
节点(节点可以在需要时才加以标注)
输入节点:系统功能流程的起点 输出节点:系统功能流程的终点 中间节点
概述-可靠性框图示例
概述-基本可靠性模型
基本可靠性模型 用以估计产品及其组成单元发生故障所 引起的维修及保障要求的可靠性模型。
并联模型
并联模型
组成系统的所有单元都发生故障时,系统才发生 故障的称为并联系统。并联系统是最简单的冗余 系统(有贮备模型)。
并联系统的逻辑图如图所示,其数学模型为
并联模型
当几个单元相互独立,系统不可靠度:
并联模型
系统可靠度
当系统各单元的寿命分布为指数分布时,对于 最常用的两单元并联系统,有
并联模型
尽管单元故障率都是常数,但并联系统的故障率不再是 常数。并联模型故障率曲线
第三章 系统的可靠性分析
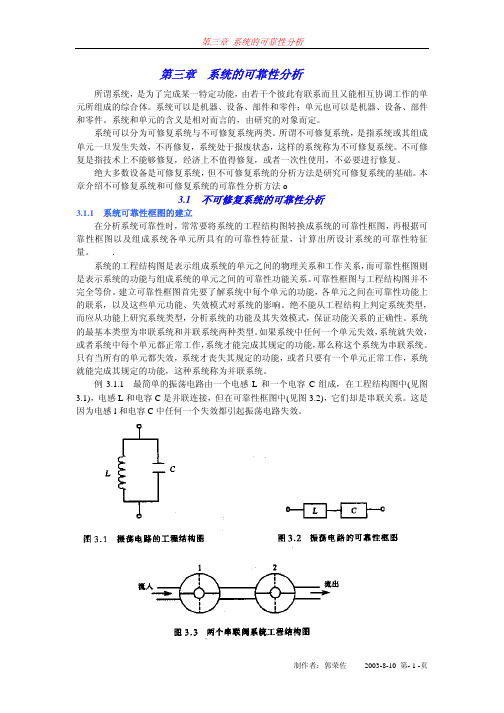
第三章系统的可靠性分析所谓系统,是为了完成某一特定功能,由若干个彼此有联系而且又能相互协调工作的单元所组成的综合体。
系统可以是机器、设备、部件和零件;单元也可以是机器、设备、部件和零件。
系统和单元的含义是相对而言的,由研究的对象而定。
系统可以分为可修复系统与不可修复系统两类。
所谓不可修复系统,是指系统或其组成单元一旦发生失效,不再修复,系统处于报废状态,这样的系统称为不可修复系统。
不可修复是指技术上不能够修复,经济上不值得修复,或者一次性使用,不必要进行修复。
绝大多数设备是可修复系统,但不可修复系统的分析方法是研究可修复系统的基础。
本章介绍不可修复系统和可修复系统的可靠性分析方法o3.1 不可修复系统的可靠性分析3.1.1 系统可靠性框图的建立在分析系统可靠性时,常常要将系统的工程结构图转换成系统的可靠性框图,再根据可靠性框图以及组成系统各单元所具有的可靠性特征量,计算出所设计系统的可靠性特征量。
.系统的工程结构图是表示组成系统的单元之间的物理关系和工作关系,而可靠性框图则是表示系统的功能与组成系统的单元之间的可靠性功能关系。
可靠性框图与工程结构图并不完全等价。
建立可靠性框图首先要了解系统中每个单元的功能,各单元之间在可靠性功能上的联系,以及这些单元功能、失效模式对系统的影响。
绝不能从工程结构上判定系统类型,而应从功能上研究系统类型,分析系统的功能及其失效模式,保证功能关系的正确性。
系统的最基本类型为串联系统和并联系统两种类型。
如果系统中任何一个单元失效,系统就失效,或者系统中每个单元都正常工作,系统才能完成其规定的功能,那么称这个系统为串联系统。
只有当所有的单元都失效,系统才丧失其规定的功能,或者只要有一个单元正常工作,系统就能完成其规定的功能,这种系统称为并联系统。
例3.1.1 最简单的振荡电路由一个电感L和一个电容C组成,在工程结构图中(见图3.1),电感L和电容C是并联连接,但在可靠性框图中(见图3.2),它们却是串联关系。
系统可靠性模型和可靠度计算ppt课件
19
第4章 系统可靠性模型和可靠度计算
(2)n-r/n表决系统 n个单元并联,只允r个单元失效的系统,当各个单元的
可靠度相同时,系统的可靠度为
Rs Rn nRn1F Cn2 Rn2 F 2 Cnr Rnr F r
20
第4章 系统可靠性模型和可靠度计算
3、混联系统可靠度计算 把若干个串联系统或并联系统重复地加以串联或并联,就得
弹药系统可靠性模型
一般弹药系统的可靠 性指标分为安全性、 作用可靠性与贮存可 靠性。
第4章 系统可靠性模型和可靠度计算
可靠性模型:是为预计或估算产品的可靠性所建立的数学 模型和可靠性框图。
基本可靠性:产品在规定条件下无故障的持续时间和概率。 基本可靠性模型是用来估计产品及组成元件引起的维修及保障 要求。它是一个串联模型,即使存在冗余单元,也按串联处理。 系统中任一单元发生故障都需要维修或更换。储备元件越多, 系统的基本可靠性越低。
狭义的定义:弹药是装有火炸药或化学战剂,能投射到敌方达到杀伤、破 坏或其他战术目的的物体的总称。
按此定义弹药的范围较窄:它不包括地雷、水雷、地雷以及爆破筒、爆 破罐、炸药包等使用时不需要投射的爆炸物。
本书所研究的弹药可靠性,主要指狭义的弹药。
28
第4章 系统可靠性模型和可靠度计算
弹药的一般组成
弹药系统一般由战斗部分和投射部分组成。
隔爆机构
隔爆机构A
隔爆机构B
引信隔爆机构结构框图
隔爆机构A
隔爆机构B 引信保险状态的可靠性框图 两套保险有一套正常工作
隔爆机构正常
隔爆机构A 隔爆机构B
引信解除状态的可靠性框图 两套保险机构都解除保险 机构正常工作
11
第4章 系统可靠性模型和可靠度计算
可靠性模型(Day1-3)
可靠性模型可靠性模型目的•为了对产品进行可靠性分析,特别是为了进行可靠性预计与分配。
了进行可靠性预计与分配•并能利用不同的分布函数来计算整各系并能利用同分布函数来计算各系统或子系统的可靠度。
可靠性模型示例I级系统II级子系统III级装备IV级零部件•可靠性模型指的是系统可靠性逻辑框图(也称可靠性方框图)及其数学模型。
靠性框其数模型•原理图表示系统中各部分之间的物理关系。
•而可靠性逻辑图则表示系统中各部分之间的功能关系,即用简明扼要的直观方法表现能使系统完成任务的各种串—并—旁联方框的组合。
旁联方框的组合•了解系统中各个部分(或单元)的功能和它们相互之间的联系以及对整个系统的作用和影响对建立系统的可靠性数学模型、完成系统的可靠性设计、分配和预计都具有重要意义。
性设计分配和预计都具有重要意义•可靠性模型建立的步骤1)定义产品义产•规定产品性能:规定每种状态下的失效判据•规定条件:在执行任务过程中,产品各单元所遇到的环境和工作应力。
•规定任务时间:必须对产品工作时间做出明确规定任务时间必须对产品工作时间做出明确的定量规定(很重要)•定义产品单元的可靠性变量:用来描述任务可靠性框图中的每个单元完成其功能所需要的时间、周期或事件2)确定产品可靠性框图3)确定计算产品可靠性的机率表达式可靠性模型逻辑图和原理图•例如: 为了获得足够的电容量,常将三个电器并联。
假定选定失效模式是电容个电器并联假定选定失效模式是电容短路,则其中任何一个电容器短路都可使系统失败。
使系统失败•因此,该系统的原理图是并联,而逻辑图应是串联的。
c1c2c3 c1c2c3可靠性框图可靠性模型•导管及二个阀门的原理图和逻辑图流体流体阀门A阀门B阀门A阀门B原理图A BA 可靠性框图B可靠性逻辑图首先应明确系统功能是什么也•可靠性逻辑图,首先应明确系统功能是什么,也就是要明确系统正常工作的标准是什么,同时还应A B弄清部件A, B正常工作时应处的状态。
ch3结构可靠性理论的基本概念
S
ds
s, r
f R (r )
∞ S
fS (s)ds∫ fR (r)dr
结构的可靠度p 大于S的概率 任意值在全区间(- 结构的可靠度 s是R大于 的概率,即上式对 任意值在全区间(- ,∞) 大于 的概率,即上式对S任意值在全区间(-∞, ) 内均应成立, 内均应成立,所以 ∞ ∞ f (r)drds (3-16) ps = fS (s) R
–
这些基本变量的集合构成基本变量空间,也称状态空间 记为 这些基本变量的集合构成基本变量空间 也称状态空间,记为 也称状态空间
X = ( X 1 , X 2 ,L , X n )
Z = g ( X ) = g ( X 1 , X 2 ,L , X n )
则当: 则当:Z >0时, 表示结构处于可靠状态, 时 表示结构处于可靠状态, Z =0时, 表示结构处于极限状态。 时 表示结构处于极限状态。 Z <0时, 表示结构处于失效状态, 时 表示结构处于失效状态, 很明显,极限状态给出了结构“可靠” 失效” 很明显,极限状态给出了结构“可靠”与“失效”之间的界 限。 称方程 (3-2) Z = g ( X ) = g ( X 1 , X 2 ,L , X n ) = 0 为极限状态方程。 极限状态方程。
∫
−∞
∫
S
s, r
3.1 结构可靠度与失效概率…12 同样地, 可定义为作用S小于抗力 的概率,即先考虑R, 小于抗力R的概率 同样地,ps可定义为作用 小于抗力 的概率,即先考虑 ,
它落在dr区间的概率为: 区间的概率为:
Pf =
∫
z <0L
∫
f X (x1) f X (x2 )L f X (xn )dx1dx2 Ldxn (3-7)
系统可靠性模型
系统可靠性模型
_可靠性框图模型
孙博
办公室:为民楼535房间 电话:10-82313214
E-mail:sunbo@ 北航可靠性与系统工程学院
2014年12月
• 复杂产品应该如何建模?
• 如何根据系统组成部件/单元的故障规律来推 断系统的故障规律?
• 可见,尽管单元故障率都是常数,但并联系统 的故障率不再是常数。
λ
λ1>λ2
λ1 λ
λ2
λs(t)
λ1=λ2 λs(t)
t
t
并联模型故障率曲线
2014/12/31
北航可靠性与系统工程学院
11
并联模型(续)
• 当系统各单元的寿命分布为指数分布时,对于 n个相同单元并联系统,有
Rs (t) 1 (1 et )n
1
2
n
• 其数学模型为:
n
RS (t) 1 1 Ri (t) i 1
2014/12/31
北航可靠性与系统工程学院
9
并联模型(续)
• 当系统各单元的寿命分布为指数分布时,对于 两单元并联系统,有
1 2
2014/12/31
Rs (t) e1t e2t e(12 )t
n
Ri (t)
n
e e it
it
i1
i 1
i 1
2014/12/31
北航可靠性与系统工程学院
7
串联模型(续)
• 当各单元的寿命分布均为指数分布时,系统的
寿命也服从指数分布,系统的故障率为各单元
的故障率之和。
s
ln(Rs (t)) t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
塔康 系统 惯性 武器 导航 备用 罗盘 大气数 据系统 机体 固定 增稳 起落架
图3-5 F/A-18任务 可靠 性框 图
本章内容
概述 典型的系统可靠性框图 可靠性分配 可靠性预计
典型可靠性模型分类
根据单元在系统中所处的状态及其对系统的影响
典型可靠性模型
非储备模型
有储备模型
工作储备模型
A
A
i 1
i
P (A )
i 1
n
P (A i )
各单元正常工作相互独立,系统及各单元的可靠度表示为:
Rs (t ) P ( A )
R i ( t ) P ( Ai )
则系统可靠度和单元可靠度之间的关系为
Rs (t )
i 1
n
Ri (t )
串联系统可靠度计算
若各单元寿命均服从指数分布,令单元失效率为 i 即:单元可靠度为: i ( t ) e t R
1
1 2 t
1 2 t
e
2 t
s
tf ( t ) d t
0
0
R (t )dt
1
1
2
1
1 2
例 题
计算串联安装的滤油网破裂失效情况下,系统的可靠度、失效率和 平均寿命。
已知:
1 0.00005(h )
1
第3章 系统可靠性设计
电子科技大学
本章内容
概述 典型的系统可靠性框图 可靠性分配 可靠性预计
概 述
• 可靠性工程中讨论的系统:
• 由相互作用和相互依赖的若干单元结合成的具有 特定功能的有机整体。 • 各单元相互协调。
• 系统可靠性设计的目的
– 保证性能指标,获得最大的可靠性 – 根据给定可靠性指标,设计满足各项要求的产品
m
is
(t ) 1
i 1
m
1
ni
j 1
R ij ( t )
用,用以度量工作有效性的一种可靠性模型。
• 系统中储备单元越多,则其任务可靠性越高。
F18任务可靠性模型
发动机 1 发动机 2 燃油系 统 应急燃 油系统 右 发电机 左 发电机 液压泵 1 液压泵 2 液压飞 控系统 备用手 动系统 通用液 压系统
电力分 配网 应急电 力 甚高频 通信 武器控 制系统
7 -1
1 0 .0 0 0 0 5 0 .0 0 0 0 1
1 0 3 3 3 .3 3h
s ( t ) 0 .5 7 1 0 ( h )
并联模型
尽管单元故障率都是常数,但并联系统的故障率不再是常数。
λ
λ 1
λ
λ 1=λ 2
λ
λ 2
λ s(t)
λ 2 t
λ 1 λ s(t) t λ s(t) t
失效模式 安装方式
堵塞
破损
串联
并联
基本可靠性模型
• 用以估计产品及其组成单元发生故障所引起的维修及保障要 求的可靠性模型。
发动机 1 发动机 2 燃油系 统 应急燃 油系统 液压泵 1 液压泵 2 液压飞 控系统 备用手 动系统
通用液 压系统
右 发电机
左 发电机
电力分 配网
环境控 制系统
应急电 力系统
R s (1000) e
s
1
s 1000
s 1 2 0.00006(h )
1
0.94176
s
1 0 .0 0 0 0 6
16667(h )
在设计时,为提高串联系统的可靠性,可
从下列三方面考虑:
(1) 尽可能减少串联单元数目 (2) 提高单元可靠性,降低其故障率 (3) 缩短工作时间
非工作储备模型
串联模型
并联模型
表决模型
桥联模型
旁联模型
说
明
系统逻辑框图只表明各单元功能与系统功能逻辑关 系,而不表明各单元之间结构上的关系; 各单元的排列次序无关紧要,一般情况下,输入和
输出单元的位臵,常常相应地排列在系统逻辑框图
的首和尾,而中间其他单元的次序可任意排列。 认为系统及其组成的备单元均可能处于两种状态: 正常和失效。 各单元所处的状态是相互独立的。
超高频 通信
甚高频 通信
雷达
武器控 制系统
武器
塔康 系统
惯性 导航
备用 罗盘
大气数 据系统
固定 增稳
机体
起落架
自检
图 3-4 F/A-18基 本可 靠性 框图
任务可靠性模型
• 用以估计产品在执行任务过程中完成规定功能的 概率(在规定任务剖面中完成规定任务功能的能 力),描述完成任务过程中产品各单元的预定作
并联模型故障率曲线
并联模型
与无贮备的单个单元相比,并联可明显提高系统可靠性(特
别是n=2时)当并联过多时可靠性增加减慢。
并联单元数与系统可靠度的关系
零件独立失效的并联系统可靠度与单元数之间的关系
RS
1
R i 0 .9
0 . 95
R i 0 . 85
0 . 90
0 . 85
1
2
3
4
5
n
并联系统可靠度大于单元可靠度的最大值。 并联系统单元数越多,系统可靠度越大;但是系统的结构 尺寸及重量都越大,造价高。 机械系统中一般采用的并联单元数不多,比如在动力装臵、 安全装臵、制动装臵采用并联时,常取
i 1
n
P (A i )
n
i 1
n
Fi ( t )
R s ( t ) 1 Fs ( t ) 1 Fi ( t ) 1
i 1
[1 R ( t )]
i i 1
n
并联模型
R S (t ) 1
1
i 1
n
R i (t )
当系统各单元的寿命分布为指数分布时,对于两单元并联系 统,有
并联系统可靠度计算
组成系统的所有单元都发生故障时,系统才发生故障。并联系 统是最简单的冗余系统(有贮备模型)。
1 2
……
n
并联模型
若事件A为系统处于正常工作状态 A 为系统失效
n
单元i处于失 效工作状态
A
A
i 1
i
假设各单元状态相互独立,则由概率乘法定理可得系统的不可 靠度
Fs ( t ) P ( A )
j
1 R ij ( t )
整个系统的可靠度为
R s (t )
n
R js ( t )
j 1
n
j 1
1
i 1
1 R ij ( t )
mj j
混联系统——并串联系统
并串联系统由若干个子系统并联构成,每个子系统由 若干个单元串联而成。
例 题
S1
5 6
S3
5
6
S2
R s3 ( t ) 1 1 R s1 ( t ) 1 R s2 ( t ) 1 1 0 .9 2 1 5 0 .9 9 3 8
2
R s ( t ) R s3 ( t ) R 5 ( t ) R 6 ( t ) 0.9938 0.99 0.995 0.9789
反映了系统及其组成单元之间的物理上的连接与组合关系
功能框图、功能流程图 反映了系统及其组成单元之间的功能关系 系统的原理图、功能框图和功能流程图是建立系统可 靠性模型的基础
可靠性框图 reliability block diagram 为预计或估算产品的可靠性所建立的方框图 • • • • 方框:产品或功能 逻辑关系:功能布局 连线:系统功能流程的方向 节点(节点可以在需要时才加以标注) – 输入节点:系统功能流程的起点 – 输出节点:系统功能流程的终点 – 中间节点
n 2, 3
混联系统——一般混联系统
一般混联系统是由串联和并联混合组成的系统 。
混联系统的等效系统
整个系统的可靠性特征量
R s ( t ) R s3 ( t ) R s4 ( t ) R 8 ( t ) R s3 ( t ) 1 [1 R s1 ( t )][1 R s2 ( t )] R s4 ( t ) 1 [1 R 6 ( t )][1 R 7 ( t )]
2 0.00001(h )
1
1 2
工作时间 t 1000 h
Rs (t ) e
s
1 0 .0 0 0 0 5
0.00005 1000
e
0.00001 1000
e
( 0.00005 0.00001) 10 00
0.99925
1 0 .0 0 0 0 1
串联系统可靠度计算
• 定义 组成系统的所有单元中任一单元的故障都会导致整个系统故障的 称为串联系统。串联系统是最常用和最简单的模型之一。
1 2
……
n
收音机的系统可靠性框图
1
2
……
n
若事件A为系统处于正常工作状态,事件 A i ( i 1, 2, ..., n ) 为单元i处于正常工作状态。
n
混联系统——串并联系统
串并联系统由若干个子系统串联构成,每个子系统由 若干个单元并联而成。
设每个单元的可靠度为
R ij ( t )
i 1, 2, ...., m j ; j 1, 2, ....., n
1j 2j ij