汽车悬架模型固有频率
汽车理论(二)名词解释
一.名词解释1、汽车使用性能:汽车能够适用各种使用条件,以最高效率、最低消耗、安全可靠地完成运输工作的能力。
2、滚动阻力系数:车轮在等速平路行驶时滚动时所需之推力与车轮负荷之比。
3、滑移率:在车轮运动中滑动成分所占的比例。
4、制动器制动力:在轮胎周缘克服制动器摩擦力矩所需的力。
5、侧向力系数:6、稳态横摆角速度增益:稳态横摆角速度与前轮转角之比。
7、汽车的动力因数:是剩余牵引力(总牵引力减空气阻力)和汽车总重之比:8、附着椭圆:驱动力或制动力在不同侧偏角条件下的曲线包络线接近于椭圆,称为附着椭圆。
9、汽车前或后轮(总)侧偏角:包括1)考虑到垂直载荷与外倾角变动等因素的弹性侧偏角;2)侧倾转向角;3)变形转向角。
10、回正力矩:是使转向车轮恢复到直线行驶的主要恢复力矩之一,它是由接地面内分布的微元侧反向力产生的。
11侧偏力和轮胎的侧偏现象:侧偏力:汽车在行驶过程中,由于路面的侧向倾斜、侧向风或曲线行驶时的离心力等的作用,车轮中心沿轮胎坐标系Y轴方向有侧向力FY,相应地在地面上产生地面侧向反作用力FY,FY即侧偏力。
侧偏现象:当车轮有侧向弹性时,即使地面侧向反作用力FY没有达到附着极限,车轮行驶方向也将偏离车轮平面cc,这就是轮胎的侧偏现象。
12轮胎坐标系:为了讨论轮胎的力学特性,需要建立一个轮胎坐标系。
规定如下:垂直车轮旋转轴线的轮胎中分平面称为车轮平面。
坐标系的原点O 为车轮平面和地平面的交线与车轮旋转轴线在地平面上投影线的交点。
车轮平面与地平面的交线取为X 轴,规定向前为正。
Z 轴与地面垂直,规定指向上方为正。
Y 轴在地面上,规定面向车轮前进方向时,指向左方为正。
13.侧倾转向:在侧向力作用下车厢发生侧倾,由车厢侧倾所引起的前转向轮绕主销的转动,后轮绕垂直地面轴线的转动,即车轮转向角的变动,称为侧倾转向14.悬架的侧倾角刚度:指侧倾时(车轮保持在地面上),单位车厢转角下,悬架系统给车厢的总弹性恢复力偶矩。
GB4783-84汽车悬挂系统的固有频率和阻尼比测定方法
中华人民共和国国家标准UDC 629.113.013汽车悬挂系统的固有频率和阻尼比621.113.07测定方法GB 4783—84 Method of measurement for natural frequencyand damping ratio—Automotive suspension system本标准适用于各种类型双轴汽车悬挂系统固有频率和阻尼比测定。
测定参数包括车身部分(簧载质量)的固有频率和阻尼比以及车轮部分(非簧载质量)的固有频率。
这三个参数是分析悬挂系统振动特性和对汽车平顺性进行研究和评价的基本数据。
1试验条件1.1试验在汽车满载时进行。
根据要可补充空载时的试验。
试验前称量汽车总质量及前、后轴的质量。
1.2悬架弹性元件、减振器和缓冲块应符合技术条件规定。
根据需要可补充拆下减振器和拆下缓冲块的试验。
1.3轮胎花纹完好,轮胎气压符合技术条件所规定的数值。
2测量仪器的频响与测点2.1测量仪器的频率范围应能满足0.3~100Hz的要求。
2.2振动传感器装在前、后轴和其上方车身或车架相应的位置上。
3试验方法3.1试验时可用以下三种方法使汽车悬挂系统产生自由衰减振动。
3.1.1滚下法:将汽车测试端的车轮,沿斜坡驶上凸块(凸块断面如图1所示,其高度根据汽车类型与悬挂结构可选取60、90、120mm,横向宽度要保证车轮全部置于凸块上),在停车挂空档发动机熄火后,再将汽车车轮从凸块上推下、滚下时应尽量保证左、右轮同时落地。
3.1.2抛下法:用跌落机构将汽车测试端车轴中部由平衡位置支起60或90mm,然后跌落机构释放,汽车测试端突然抛下。
3.1.3拉下法:用绳索和滑轮装置将汽车测试端车轴附近的车身或车架中部由平衡位置拉下60或90mm,然后用松脱器使绳索突然松脱。
注:用上述三种方法试验时,拉下位移量、支起高度或凸块高度的选择要保证悬架在压缩行程时不碰撞限位块,又要保证振动幅值足够大与实际使用情况比较接近。
悬架偏频计算公式
悬架偏频计算公式
一、悬架偏频计算公式:
n=(√k/m)/2π,k为悬架刚度,m为簧上质量;偏频为评判整车平顺性能的一个重要参数,在汽车设计初期就要先定义偏频的范围.
普通轿车前悬架偏频要求1.0--1.45HZ,后悬架偏频要求1.17--1.58HZ。
级别越高的轿车,偏频越小越好。
高级桥车前悬架偏频0.80--1.15HZ,后悬架偏频0.98--1.30。
货车满载前悬架偏频1.5--2.10HZ,后悬架偏频1.70--2.17HZ。
二、悬架偏频:
悬架固有频率,偏频低,悬架软--提升轮胎抓地力,汽车平顺性好;偏频高,悬架硬--响应速度快,提升操纵稳定性;若调低后偏频,调硬前偏频,则后轮抓地力提升,前轮抓地力降低,增加不足转向,有良好的转向特性。
悬架主要参数的确定
悬架主要参数的确定第三节悬架主要参数的确定⼀、悬架静挠度c f悬架静挠度c f ,是指汽车满载静⽌时悬架上的载荷Fw 与此时悬架刚度c 之⽐,即c f =Fw /c 。
汽车前、后悬架与其簧上质量组成的振动系统的固有频率,是影响汽车⾏驶平顺性的主要参数之⼀。
因现代汽车的质量分配系数ε近似等于1,于是汽车前、后轴上⽅车⾝两点的振动不存在联系。
因此,汽车前、后部分的车⾝的固有频率n1和n2(亦称偏频)可⽤下式表⽰式中,c1、c2为前、后悬架的刚度(N /cm);m1、m2为前、后悬架的簧上质量(kg)。
当采⽤弹性特性为线性变化的悬架时,前、后悬架的静挠度可⽤下式表⽰ 111c g m f c = 222c g m f c =式中,g 为重⼒加速度(g=981cm /s 2)。
将1c f 、 2c f 代⼊式(6—1)得到分析上式可知:悬架的静挠度c f 直接影响车⾝振动的偏频n 。
因此,欲保证汽车有良好的⾏驶平顺性,必须正确选取悬架的静挠度。
在选取前、后悬架的静挠度值1c f 和2c f 时,应当使之接近,并希望后悬架的静挠度2c f ⽐前悬架的静挠度1c f ⼩些,这有利于防⽌车⾝产⽣较⼤的纵向⾓振动。
理论分析证明:若汽车以较⾼车速驶过单个路障,nl /n2<1时的车⾝纵向⾓振动要⽐n1/n2>1时⼩,故推荐取2c f =(0.8~0.9) 1c f 。
考虑到货车前、后轴荷的差别和驾驶员的乘坐舒适性,取前悬架的静挠度值⼤于后悬架的静挠度值,推荐2c f =(0.6~0.8) 1c f 。
为了改善微型轿车后排乘客的乘坐舒适性,有时取后悬架的偏频低于前悬架的偏频。
⽤途不同的汽车,对平顺性要求不⼀样。
以运送⼈为主的轿车对平顺性的要求最⾼,⼤客车次之,载货车更次之。
对普通级以下轿车满载的情况,前悬架偏频要求在1.00~1.45Hz ,后悬架则要求在1.17~1.58Hz 。
原则上轿车的级别越⾼,悬架的偏频越⼩。
汽车悬挂系统的固有频率和阻尼比测量
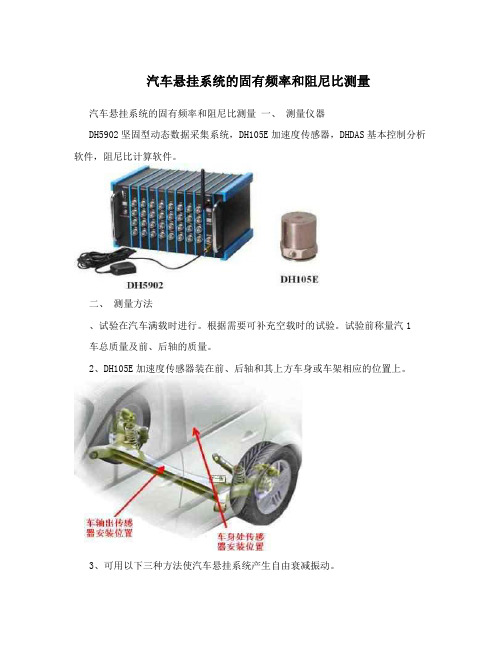
汽车悬挂系统的固有频率和阻尼比测量汽车悬挂系统的固有频率和阻尼比测量一、测量仪器DH5902坚固型动态数据采集系统,DH105E加速度传感器,DHDAS基本控制分析软件,阻尼比计算软件。
二、测量方法、试验在汽车满载时进行。
根据需要可补充空载时的试验。
试验前称量汽1 车总质量及前、后轴的质量。
2、DH105E加速度传感器装在前、后轴和其上方车身或车架相应的位置上。
3、可用以下三种方法使汽车悬挂系统产生自由衰减振动。
3.1 滚下法:将汽车测试端的车轮,沿斜坡驶上凸块(凸块断面如图所示,其高度根据汽车类型与悬挂结构可选取60、90、120mm,横向宽度要保证1车轮全部置于凸块上),在停车挂空档发动机熄火后,再将汽车车轮从凸块上推下、滚下时应尽量保证左、右轮同时落地。
3.2 抛下法:用跌落机构将汽车测试端车轴中部由平衡位置支起60或90mm,然后跌落机构释放,汽车测试端突然抛下。
3.3 拉下法:用绳索和滑轮装置将汽车测试端车轴附近的车身或车架中部由平衡位置拉下60或90mm,然后用松脱器使绳索突然松脱。
注:用上述三种方法试验时,拉下位移量、支起高度或凸块高度的选择要保证悬架在压缩行程时不碰撞限位块,又要保证振动幅值足够大与实际使用情况比较接近。
对于特殊的汽车类型与悬架结构可以选取60、90、120mm以外的值。
4、数据处理4.1 用DH5902采集仪记录车身和车轴上自由衰减振动的加速度信号;4.2 在DHDAS软件中对车身与车轴上的加速度信号进行自谱分析,截止频率使用20Hz低通滤波,采样频率选择50Hz,频率分辨率选择0.05Hz;4.3 加速度自谱的峰值频率即为固有频率;4.4 在DHDAS软件中选择频响分析,车轴上的信号作为输入,车身上的信号作为输出得到幅频特性曲线,采样频率选择200Hz,该曲线的峰值频率为车轮部分不运动时的车身部分的固有频率f’,有软件中的阻尼比计算模块直接0 得出阻尼比。
2三、仪器指标1、DH5902数据采集仪1.1通道数:每个模块由控制单元、供电单元和最多四组各种类型测试单元任意组合而成,每单元有4个测试通道;1.2 控制单元内置了高性能嵌入式计算机、抗振高速电子硬盘(32G),100M以太网接口;无线以太网接口。
悬架设计
悬架设计三、设计要求:1)良好的行驶平顺性:簧上质量 + 弹性元件的固有频率低;前、后悬架固有频率匹配:乘:前悬架固有频率要低于后悬架尽量避免悬架撞击车架;簧上质量变化时,车身高度变化小。
2)减振性好:衰减振动、抑制共振、减小振幅。
3)操纵稳定性好:车轮跳动时,主销定位参数变化不大;前轮不摆振;稍有不足转向(δ1>δ2)4)制动不点头,加速不后仰,转弯时侧倾角合适5)隔声好6)空间尺寸小。
7)传力可靠、质量小、强度和寿命足够。
§6-2 悬架结构形式分析:一、非独立悬架和独立悬架:二、独立悬架结构形式分析:1、评价指标:1)侧倾中心高度:A、侧倾中心:车身在通过左、右车轮中心的横向垂直平面内发生侧倾时,相对于地面的瞬时转动中心,叫侧倾中心。
B、侧倾中心高度:侧倾中心到地面的距离。
C、侧倾中心位置影响:位置高:侧倾中心到质心的距离缩短,侧向力臂和侧倾力矩↓,车身侧倾角↓;过高:车身倾斜时轮距变化大,加速轮胎车轮外倾角α磨损。
2)车轮定位参数:车轮外倾角α,主销内倾角β,主销后倾角γ,车轮前束等会发生变化。
主销后倾角γ变化大→转向轮摆振车轮外倾角α化大→直线行驶稳定性;轮距变化,轮胎磨损3)悬架侧倾角刚度A、车厢侧倾角:车厢绕侧倾轴线转动的角度B、影响:车厢侧倾角与侧倾力矩和悬架总的侧倾角刚度有关,影响操纵稳定性和平顺性4)横向刚度:影响操纵稳定性转向轴上悬架横向刚度小,转向轮易摆振, 5)空间尺寸:占用横向尺寸→影响发动机布置和拆装;占用高度尺寸→影响行李箱大小和油箱布置。
2、不同形式悬架比较(表6-1)问:A、车轮跳动时,为什么α、β、γ如此变化?B、轮距为什么如此变化?C、应用?1)双横臂式:A、α、β均变,∵非平移,选择四杆结构,可小;B、四杆;C、应用:中高轿前悬,不用于微轿(空间)。
2)单横臂:A、α、β变化大,∵绕一点横向转动;B、绕一点横向转动;C、应用:后悬,少用于前悬。
汽车悬架模型固有频率
汽车悬架模型固有频率福特产Granada 轿车1/4模型如右图示,图中,xb ,xw , xr 分别为车体、车轮垂直振动位移和地面激励参数如下:1/4车体质量Mb=317.5kg ,车轮质量Mw=45.4kg,轮胎刚度kt=192000N/m,悬架刚度ks=22000N/m ,悬架阻尼系数C =1520Ns/m 。
现假定车辆以30km/h 的速度行驶在c 级路面上行驶。
系统的状态方程如下:求解系统的固有频率>> A=[317.5 0;0 45.4];B=[22000 -22000;-22000 192000+22000];D=A\B;[v,d]=eig(D)f=d^0.5/6.28v =-0.9946 0.0149-0.1036 -0.9999()()()0w w w b s w b t w r x C x k x x k x x x M +-+-+-=0)()(=-+-+w b s w b b b x x k x x C x Md =1.0e+03 *0.0621 00 4.7209f =1.2546 00 10.9409为了进一步研究汽车垂直俯仰两个自由度的振动以及汽车纵轴上任一点的垂直振动,忽略车轮部分的影响,建立右上图所示的双轴汽车模型参数如下:½车身质量Mbh=690kg转动惯量Jb=1222kgm2车轮质量Mwf=40.5kg,Mwr=45.4kg轮胎刚度ktf=ktr=192000N/m悬架刚度ksf=17000N/m,ksr=2000N/m悬架阻尼csf=csr=1500Ns/m几何尺寸a=1.25m,b=1.51m车辆以30km/h 的速度行驶在c 级路面上行驶根据Lagrange 方程,列写系统方程如下:当俯仰角较小时,可以近似的认为: 所以 求解系统的固有频率A=[40.5 0 0 0;0 1 0 0;0 0 45.4 0;0 0 0 1];B=[209000 -17000 0 0;-46.3746 46.3746 2.0971 -2.0971;0 0 214000 -22000;1.6205 -1.6205 -56.3576 56.3576];D=A\B;[v,d]=eig(D)f=d^0.5/6.28v =1.0000 -0.0004 -0.0804 -0.0181-0.0091 -0.0004 -0.9809 -0.2203-0.0003 -0.9999 -0.0183 0.10080.0003 0.0121 -0.1763 0.9700d =1.0e+03 **)*(*0)(0)(003311⎪⎪⎩⎪⎪⎨⎧=+--=+--=-+=--r or tr wr f of tf wf r f b r f b bh F z x k z M F z x k z M bF aF J F F z Mϕ⎩⎨⎧-+-=-+-=)()()()(43432121z z c z z k F z z c z z k F sr sr r sf sf f ϕϕ b z z a z z b b +=-=42⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧++-=--=-++=--=r b bh f b bh r or tr wr r b bh f b bh f of tf wf F J b M F J ab M z F z x k M z F J ab M F J a M z F z x k M z]1[]1[])([1]1[]1[])([1243322115.1643 0 0 0 0 4.7195 0 0 0 0 0.0422 00 0 0 0.0508f =11.4432 0 0 0 0 10.9393 0 0 0 0 1.0348 0 0 0 0 1.1354考虑车体上下跳动、俯仰、侧倾,四个车轮的跳动,共7个自由度,建立如右图所示整车模型。
汽车悬架系统性能指标的影响因素分析
示 时 间频 率路 面输 入模 型 , 不平 度 系 数 G 取 。为 5 ×
1 m。 cce c c 0 / y l( yl 路 面 波 的 个 数 ) 指 数 P 为 e为 ,
2 5 车辆 的恒 定前 进速 度 U为 2 s 则路 面 输 入 ., 0 m/ ,
第 5期 21 O 1年 9月
表 1 福 特 G a a a轿 车 车 身 加 速 度 数 值 表 rn d
3 3 悬 架参 数对 悬架 动行 程指标 的影响 . 由式 (0 、 ( 1解 出 k 1 )式 1 ) 和 c 并 代人 式 ( ) 得 7, 到以 / 和 为 变量 的悬架 动行 程 目标 函数 :
函数 的 变化 规 律 , 而 针 对 不 同 车型 选择 不 同 的 悬 架参 数 匹 配 , 导 参数 调 整 , 到 最佳 方 案 。 从 指 找
关 键 词 :汽 车 ;悬 架 系统 ; 能 指 标 ;悬架 参 数 ; t e t a 性 Ma h mai c
中图分类号 : 6.3 U4 3 3
图 1 车 辆 双 质 量 悬 架 系统 模 型
公 路 与 汽 运
总 第 1 6期 4
Hi h y g wa s& Au o tv plc to s t mo i e Ap ia in
1 3
标 进行 定 量 评 价 , 车 身 加 速 度 ( ) 悬 架 动 行 程 即 n 、
Grn d 轿 车的参 数 , a aa 由行 驶 动力 学 相关 知 识 , 给定 固有频 率 的变 化 范 围为 0- , " 4Hz 阻尼 比 8 的变  ̄ 化 范 围为 0 1 0 9 键 人 3 函数绘 图命 令 Po3 .~ . , D ltD
汽车性能实验3—悬架固有频率测量汇总.
------汽车工程学院实验中心 王 琛
一、实验目的及要求
实验依据GB4783- 84《汽车悬挂系统的固 有频率和阻尼比测定方法》 测定汽车车身部分固有频率、阻尼比和车轮 部分的固有频率。根据要求组成测量系统, 掌握测量点的布置及测试系统的调试。掌握 仪器的正确使用方法,对测量数据进行正确 的处理和分析,并编制实验报告。
2.00 1.00 F Time cheshen
g Real
0.60
0.14
-0.33
-1.00 4.00
4.46
4.77
5.12 s 10.00
Amplitude
0.00
六、实验结果与分析结论(2)
频率分析法 用数据处理仪记录时间历程后,进行FFT变 换得到自功率谱函数,用截止频率为20Hz低 通滤波。频率分辨率为0.05Hz。车身上的峰 值频率即为车身的固有频率,车轮上的峰值频 率即为车轮的固有频率。 阻尼比由频响函数(车轴作输入车身作输出)
二、实验条件
实验应在汽车满载时进行。根据需要可补充 空载时的试验。试验前需称量汽车总质量及 前、后轴的质量。 悬架弹性元件、减振器和缓冲块应符合技术 条件规定。 试验车辆轮胎花纹完好,轮胎气压符合技术 条件规定的数值。
三、实验原理
传感器采用电压型压电式加速度计,分别安装在前轴(或后轴)车 身及车架的相应位置。 放大器采用内置电压放大器,对加速度信号变换成的电荷信号进 行放大并转换成电压信号输出。 记录仪器采用LMS数据处理系统,记录振动加速度的时间历程及频 域并处理计算(数据采集系统采集前端带有恒流源输出)。 整个测量系统的频率范围必须满足0.3—100Hz的要求。
发动机悬置系统的固有特性与模态解耦分析
AUTO PARTS | 汽车零部件随着现代社会的不断进步和汽车技术的不断发展,汽车乘坐的舒适性受到了广泛关注。
汽车制造企业在生产设计汽车时,往往在汽车NVH方面投入了大量资金和人力,汽车发动机产生的噪音和振动直接影响了汽车的NVH性能[1]。
提高发动机悬置系统隔振性能是汽车制造相关人员的一个重要课题,而悬置系统的固有特性与模态解耦是影响悬置系统隔振性能的重要因素之一。
1 发动机悬置的作用与分类发动机悬置就是连接发动机和汽车车身的装置,如图1所示。
主要作用有限位功能、支承功能和降噪隔振功能。
随着汽车工业的不断发展,发动机悬置的种类也多了起来,主要有橡胶悬置、液压悬置和空气悬置。
图1 发动机悬置朱锋上海科创职业技术学院 上海市 201620摘 要:随着汽车隔振技术的发展,人们对汽车乘坐舒适性有了更高的要求,各个汽车生产商也在逐渐增加这方面的投入。
科学地设计动力总成的悬置系统,能有效降低车身和发动机的振动,在提升整车NVH性能的同时也给车内人员带来更舒适的体验。
在悬置系统设计过程中悬置的固有特性和模态解耦是悬置系统设计的主要参数之一。
本文对系统固有特性和模态解耦进行分析,为悬置系统隔振设计提供参考与帮助。
关键词:发动机悬置 固有特性 模态解耦Analysis of Intrinsic Characteristics and Modal Decoupling of Engine Mount SystemsZhu FengAbstract: W ith the development of automobile vibration isolation technology, people have higher requirements for car riding comfort, and various automobile manufacturers are gradually increasing their investment in this area. The scientific design of the powertrain suspension system can effectively reduce the vibration of the body and engine, improve the NVH performance of the whole vehicle, and bring a more comfortable experience to the people in the car. In the process of suspension system design, the intrinsic characteristics and modal decoupling of suspension are one of the main parameters of suspension system design. In this paper, the intrinsic characteristics and modal decoupling of the system are analyzed, and the design of vibration isolation of the suspension system is provided as a reference and help.Key words: E ngine Mounting, Intrinsic Characteristics, Modal Decoupling发动机悬置系统的固有特性与模态解耦分析2 悬置系统固有特性分析2.1 悬置系统六自由度模型分析汽车动力总成的振动是一个复杂的振动系统,为了更好地分析该系统的振动特性,我们假设汽车发动机和变速箱组成的动力总成和车身都为刚体,把橡胶悬置元件视为三向正交的弹性元件,从而建立动力总成悬置系统的六自由度振动方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车悬架模型固有频率
福特产Granada 轿车1/4模型如右图示,
图中,xb ,xw , xr 分别为车体、车轮垂直振
动位移和地面激励
参数如下:
1/4车体质量Mb=317.5kg ,
车轮质量Mw=45.4kg,
轮胎刚度kt=192000N/m,
悬架刚度ks=22000N/m ,
悬架阻尼系数C =1520Ns/m 。
现假定车辆以30km/h 的速度行驶在c 级路面上行驶。
系统的状态方程如下:
求解系统的固有频率
>> A=[317.5 0;0 45.4];
B=[22000 -22000;-22000 192000+22000];
D=A\B;
[v,d]=eig(D)
f=d^0.5/6.28
v =
-0.9946 0.0149
-0.1036 -0.9999
()()()0w w w b s w b t w r x C x k x x k x x x M +-+-+-=
0)()(=-+-+w b s w b b b x x k x x C x M
d =
1.0e+03 *
0.0621 0
0 4.7209
f =
1.2546 0
0 10.9409
为了进一步研究汽车垂直
俯仰两个自由度的振动以
及汽车纵轴上任一点的垂
直振动,忽略车轮部分的
影响,建立右上图所示的
双轴汽车模型
参数如下:
½车身质量Mbh=690kg
转动惯量Jb=1222kgm2
车轮质量Mwf=40.5kg,Mwr=45.4kg
轮胎刚度ktf=ktr=192000N/m
悬架刚度ksf=17000N/m,ksr=2000N/m
悬架阻尼csf=csr=1500Ns/m
几何尺寸a=1.25m,b=1.51m
车辆以30km/h 的速度行驶在c 级路面上行驶
根据Lagrange 方程,列写系统方程如下:
当俯仰角较小时,可以近似的认为: 所以 求解系统的固有频率
A=[40.5 0 0 0;0 1 0 0;0 0 45.4 0;0 0 0 1];
B=[209000 -17000 0 0;-46.3746 46.3746 2.0971 -2.0971;0 0 214000 -22000;1.6205 -1.6205 -56.3576 56.3576];
D=A\B;
[v,d]=eig(D)
f=d^0.5/6.28
v =
1.0000 -0.0004 -0.0804 -0.0181
-0.0091 -0.0004 -0.9809 -0.2203
-0.0003 -0.9999 -0.0183 0.1008
0.0003 0.0121 -0.1763 0.9700
d =
1.0e+03 *
*)*(*0)(0)(003311⎪⎪⎩⎪⎪⎨⎧=+--=+--=-+=--r or tr wr f of tf wf r f b r f b bh F z x k z M F z x k z M bF aF J F F z M
ϕ⎩⎨⎧-+-=-+-=)()()()(43432121z z c z z k F z z c z z k F sr sr r sf sf f ϕϕ b z z a z z b b +=-=42⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧++-=--=-++=--=r b bh f b bh r or tr wr r b bh f b bh f of tf wf F J b M F J ab M z F z x k M z F J ab M F J a M z F z x k M z
]1[]1[])([1]1[]1[])([1243322
11
5.1643 0 0 0 0 4.7195 0 0 0 0 0.0422 0
0 0 0 0.0508
f =
11.4432 0 0 0 0 10.9393 0 0 0 0 1.0348 0 0 0 0 1.1354
考虑车体上下跳动、
俯仰、侧倾,四个车
轮的跳动,共7个自
由度,建立如右图所
示整车模型。
福特Granada轿车参数如下:
车体质量m b=1380kg
俯仰转动惯量I p=2444kgm2
侧倾转动惯量I r=380kgm2
½轮距t f=t r=0.74m
其余数据与双轴模型同
根据Lagrange方程,列写系统方程如下:
车体质心垂向运动方程
车体俯仰运动方程:
车体侧倾运动方程:
四个车轮质量的垂向运动方程:
在俯仰和侧倾角较小时,各点垂直位移有右示关系
求解系统的固有频率
A=[1380 0 0 0 0 0 0;
0 2444 0 0 0 0 0;
0 0 2444 0 0 0 0;
0 0 0 40.5 0 0 0;
0 0 0 0 40.5 0 0;
0 0 0 0 0 45.4 0;
0 0 0 0 0 0 45.4];
B=[78000 23940 0 -17000 -17000 -22000 -22000;
19520 76725 0 21250 21250 -33220 -33220; 0)]()()()([)]()()()([=-+-+-+---+-+-+-+b x x k x x c x x k x x
c a x x k x x c x x k x x c I bD wD sD bD wD sD bC wC sC bC wC sC bB wB sB bB wB sB bA wA sA bA wA sA
P θ0)]()()()([)]()()()([=-----+-------+--r bD wD sD bD wD sD bC wC sC bC wC sC f bB wB sB bB wB sB bA wA sA bA wA sA r t x x k x x c x x k x x
c t x x k x x c x x k x x c I ϕ
0)()()(0)()()(0)()()(0)()()(=------=------=------=------wD bD sD wD bD sD wD gD tD wD wD wC bC sC wC bC sC wC gC tC wC wC wB bB sB wB bB sB wB gB tB wB wB wA bA sA wA bA sA wA gA tA wA wA x x c x x k x x k x m x x c x x k x x k x
m x x c x x k x x k x
m x x c x x k x x k x
m 0)()()()()()()()(=----------------bD wD sD bD wD sD bC wC sC bC wC sC
bB wB sB bB wB sB bA wA sA bA wA sA b b x x k x x c x x k x x c x x k x x c x x k x x c x m ϕθϕ
θϕθϕ
θr b bD r b bC f
b bB f b bA t b x x t b x x t a x x t a x x -+=++=--=+-=
0 0 42713 -12580 12580 -16280 16280; -17000 21250 -12580 209000 0 0 0 ; -17000 21500 12580 0 209000 0 0 ; -22000 -33220 -16280 0 0 214000 0 ; -22000 -33220 16280 0 0 0 214000];
D=A\B;
[v,d]=eig(D)
f=d^0.5/6.28
v =
0.9549 0.4435 0.0000 -0.0038 -0.0000 0.0048 -0.0000
0.2154 -0.8693 -0.0000 0.0027 0.0000 0.0041 -0.0000
-0.0000 0.0009 -0.9907 0.0000 0.0016 0.0000 0.0020
0.0564 0.1251 -0.0598 0.7048 -0.7071 0.0009 -0.0050
0.0562 0.1260 0.0598 0.7094 0.7071 0.0011 0.0050
0.1331 -0.0897 -0.0756 0.0010 0.0051 -0.7071 -0.7071
0.1332 -0.0898 0.0756 0.0010 -0.0051 -0.7071 0.7071
d =
1.0e+03 *
0.0545 0 0 0 0 0 0
0 0.0220 0 0 0 0 0
0 0 0.0158 0 0 0 0
0 0 0 4.6073 0 0 0
0 0 0 0 4.6041 0 0
0 0 0 0 0 4.7212 0
0 0 0 0 0 0 4.7147
f =
1.1759 0 0 0 0 0 0
0 0.7469 0 0 0 0 0
0 0 0.6337 0 0 0 0
0 0 0 10.8085 0 0 0
0 0 0 0 10.8047 0 0
0 0 0 0 0 10.9413 0
0 0 0 0 0 0 10.9337。