5.3-3线性二自由度汽车模型的动力学分析
线性二自由度汽车模型
α1 −α2 = KayL
m: vehicle mass
16/81
α1-α 2
K > 0不足转向
α1 −α2 = KayL
K = 0中性转向
ay
K < 0过度转向
a y > 0.3 ~ 0.4 g,α1 − α 2与a y不再为线性关系 α和ωr急剧变化,出现半径迅 速增加或减小的现象。 a y对α1 − α 2关系用斜率表示,斜率 > 0 ⇒ 不足转向
β
+
L1ω r
u
−δ
α2
= υ − L2ω r
u
= β − L2ω r
u
FY1 = k1α1 FY 2 = k2α2
6/81
⎩⎨⎧kL11αk11α+1
k2α2 = m(uωr + υ − L2k2α2 = I zωr
)
FY1 + FY 2 ≈ m(uωr+υ)
L1FY1 − L2FY 2 ≈ I zωr
13/81
ωr δ
⎟⎞ ⎠
K <0
K =0
K >0
ucr uch ua
14/81
W过度转向汽车车速达到临界车速时将失 去稳定性。因为只要一个很小的转角δ, 横摆角速度增益ωr/δ就趋于无穷大。
W因为假设纵向速度为优先值,根据纵向 速度与角速度的关系可知,汽车转向半 径极小。这样,汽车必定发生激转,导 致侧滑或侧翻的发生。
5.3 线性二自由度汽车模型 对前轮角输入的响应
1 线性二自由度汽车模型的运动微分方程
☆忽略转向系的影响,以前轮转角作为输入; ☆只在地面上做平面运动,忽略悬架作用; ☆前进(纵轴)速度不变,只有沿y轴的侧向速度 和绕z轴的横摆运动(ay<0.4g) ; ☆驱动力不大,对侧偏特性无影响; ☆忽略空气阻力; ☆忽略因载荷变化引起左、右轮胎特性的变化; ☆忽略回正力矩的变化。
汽车理论5.3

1 2 。
21
第三节 线性二自由度汽车模型对前轮角输入的响应
2)转向半径的比R/R0
已知 R R0 1 Ku 2
R 1 Ku 2 R0
K=0, R/R0=1,汽车具有中性转向特点; K>0, R/R0>1,汽车具有不足转向特点;
K<0, R/R0<1,汽车具有过多转向特点。
8
1 u
第三节 线性二自由度汽车模型对前轮角输入的响应
二、前轮角阶跃输入下汽车的稳态响应
—等速圆周行驶 1.稳态响应
稳态时ωr为定值
0 v
r 0
代入运动微分方程式得
v 1 k1 k2 ak1 bk2 r k1 mur u u v 1 2 ak1 bk2 a k1 b 2 k2 r ak1 0 u u
2
度的影响。
第三节 线性二自由度汽车模型对前轮角输入的响应
2.两轮汽车模型及车辆坐标系 y
x
3
第三节 线性二自由度汽车模型对前轮角输入的响应
3.运动学分析
确定汽车质心(绝
对)加速度在车辆坐标
系的分量ax和ay。
沿Ox轴速度分 量的变化为
u u cos u v vsin
(1)
(2)
由式(2)得
r I Z
1 2 a k1 b 2k2 r ak1 u ak1 bk2
28
第三节 线性二自由度汽车模型对前轮角输入的响应
求导后得
1 2 r a k1 b 2 k 2 r ak1 I Z u ak1 bk 2
汽车二自由度动力学模型

汽车二自由度动力学模型
汽车二自由度动力学模型是一种用于描述汽车运动的简化模型。
它考虑了两个自由度,通常是车辆的纵向(前进方向)和侧向(横向)运动。
在这个模型中,车辆被视为一个质量集中的刚体,通过两个自由度来描述其运动状态。
这两个自由度通常是车辆的速度(纵向)和横摆角速度(侧向)。
汽车二自由度动力学模型的建立基于一些基本的物理原理,如牛顿第二定律、动量守恒定律和刚体动力学。
通过对这些原理的应用,可以得到描述车辆运动的微分方程。
这些方程通常包括车辆的加速度、驱动力或制动力、转向力矩以及车辆的惯性参数等。
通过求解这些微分方程,可以预测车辆在不同工况下的运动响应,例如加速、制动、转弯等。
汽车二自由度动力学模型在车辆动力学研究、驾驶模拟器、自动驾驶系统等领域有广泛应用。
它可以帮助工程师和研究人员了解车辆的基本运动特性,评估车辆的操控稳定性、行驶安全性等方面的性能。
然而,需要注意的是,二自由度模型是一种简化的模型,它忽略了许多实际情况中的复杂因素,如悬挂系统、轮胎特性、空气动力学等。
在实际应用中,可能需要使用更复杂的多自由度模型或考虑更多的因素来更准确地描述汽车的运动。
总的来说,汽车二自由度动力学模型提供了一个简单而有用的工具,用于初步研究和理解汽车的运动行为,但在具体应用中,需要根据实际需求进行适当的修正和扩展。
如果你对汽车动力学模型有更深入的问题或需要进一步的讨论,我将很愿意提供帮助。
05-3 线性二自由度汽车模型
业 ¾ 输出、输入的幅值比是频率 f 的函数,称幅频特性。 工 ¾ 相位差也是 f 的函数,称为相频特性。
¾ 两者统称为频率特性。
车
汽
北
2010-5-20
共55页
17
第三节 线性二自由度汽车模型对前轮角输入的响应
权
版 ωr + 2ω0ζωr + ω02ωr = B1δ + B0δ
B0δ 0 ω02
= uL 1+ Ku2
δ0
=
ωr δ
⎞ ⎟
δ0
⎠s
工业 即稳态横摆角速度
ωr0
=
ωr δ
⎟⎞ ⎠s
δ
0
车对应的齐次方程为 汽ωr + 2ω0ζωr + ω02ωr = 0
北
2010-5-20
共55页
5
第三节 线性二自由度汽车模型对前轮角输入的响应
权
其通解可由如下特征方程求得
业 式中
工 ζ = h 2ω0m′
汽车 B1
=
b1 m′
ω02
=
c m′
ζ—阻尼比。
B0
=
b0 m′
北
2010-5-20
共55页
3
第三节 线性二自由度汽车模型对前轮角输入的响应
权
前轮角阶跃输入的数学表达式为
版
t < 0,δ = 0 ⎫
转 向
院 t
≥
0,δ
=
δ
0
⎪ ⎬
盘 转 角
学 t > 0,δ = 0 ⎪⎭
ω r = C e−ζω0tsin ω 0 1 − ζ 2 t + Φ
车辆二自由度模型状态空间方程

车辆二自由度模型状态空间方程一、车辆二自由度模型状态空间方程车辆二自由度模型是车辆动力学中常用的简化模型之一,它将车辆简化为一个在平面上运动的质点。
在这个模型中,车辆可以做平面上的平移和转动运动,因此被称为车辆的二自由度模型。
而状态空间方程则是描述这一模型运动规律的数学工具。
在车辆二自由度模型中,通常采用平移运动的位置和速度以及转动运动的姿态角和角速度作为描述车辆状态的变量。
通过对车辆动力学和控制理论的研究,可以得到描述车辆二自由度模型的状态空间方程。
这些方程包括车辆的位置、速度、姿态角和角速度之间的动态关系,可以用来描述车辆在不同行驶状态下的运动规律。
二、深度分析车辆二自由度模型状态空间方程车辆二自由度模型状态空间方程的深度分析需要从车辆动力学和控制理论的角度进行。
我们需要深入了解车辆的平移和转动运动规律,包括车辆在不同速度和转角条件下的运动特性,以及外部环境对车辆运动的影响。
我们需要探讨车辆控制系统对车辆状态的影响,包括如何通过控制输入来影响车辆的运动状态。
我们需要分析车辆二自由度模型状态空间方程的数学推导和物理意义,以深入理解车辆状态空间方程的结构和参数含义。
在具体的分析过程中,我们可以通过建立车辆运动的动力学模型和控制模型,使用数学工具进行模型分析和仿真验证,从而深入理解车辆二自由度模型状态空间方程的动态性质和稳定性。
三、撰写高质量车辆二自由度模型状态空间方程文章基于以上的深度分析,我们可以着手撰写一篇高质量的文章。
我们可以介绍车辆二自由度模型的基本原理和概念,然后逐步展开对车辆状态空间方程的分析和推导,包括车辆运动学和动力学的描述,以及状态空间方程的数学结构和物理意义。
在文章中,我们可以多次提及车辆二自由度模型状态空间方程的关键词,以加强文章的专业性和知识性。
我们还可以结合个人的观点和理解,对车辆二自由度模型状态空间方程进行综合性的总结和回顾,为读者提供全面、深刻和灵活的理解。
一篇关于车辆二自由度模型状态空间方程的高质量文章需要具备深度和广度兼具的分析能力,结合个人观点和实践经验,以及对读者的引导和启发。
二自由度4WS汽车的动力分析(Ⅰ)--线性分析
(#)
几何关系是 " $ ’ %, 3 ’ & $*+# $ # "#$# # 采用司机模型
!!
(%)
(" . ) &) &;* ’ " $ )& !
("))
其中 * ’ - $ / , ) ’ 关系的一个示意 2
$ / < 2 图 ! 是# = & ! ) . ) !* % ! !!
(
)
* " $( ( (&) 3 $! ) 3 $ ," ! ! 4 )’ . ! 4) 5% & 其中 5 % 是视觉时滞和神经系统的时间常数; * , 为司 机预观距离; ) 为司机的转向增益 2 将上述方程改写 为状态变量的形式: " ’( ,6 ! 7& 6 1 6, $) 其中
万方数据
**
华 南 理 工 大 学 学 报(自 然 科 学 版)
第 !+ 卷
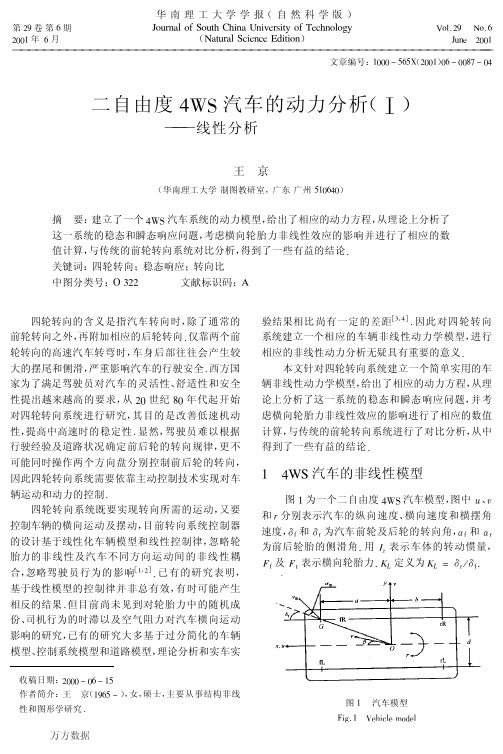
考虑汽车的横向及横摆运动, 车体的运动方程 为: # $ %& )’ ! ( ! "#$ !! $ ! ( % "#$ )*!! (" ! +," % ’ ! -( ! "#$ !! . ! /( % "#$ ) &!! 采用非线性轮胎力模型:
6 ’( # , %, 3, #, !!)
[
(
)
(’)
![ ( ! "#$ 8 & $ ( % "#$ ) & 8 & ] . &8 ! 1" ’ ! ![ ] -( ! "#$ 8 & . /( % "#$ ) & 8 & 1! ’ +. 1 # ’ 8 " "#$ 8 % $ & $*+ 8 % , " 1% ’ 8!, 1& ’ . 2 5% (() )* , )8# $ 8" "#$ 8% $ )* , $*+ 8% $ 8& & 8 " $ -8 ! . 8& "! ’ ’%"() & 8 " . /8 ! . ) & 8& "% / ’%"() & …) /, +, , $ ’( - , $ ’! $( 3 ’# #’ " 取 " 利用方程 (’) 可以 % ’ " ! 4 )’ ), 得到系统的平凡解 ! 0 ’(), 除此之外, ), ), ), )),
二自由度车辆动力学模型
二自由度车辆动力学模型一自由度车辆动力学模型和二自由度车辆动力学模型是当前车辆动力学研究的重要部分。
一自由度车辆动力学模型只有一个转动扭矩,而二自由度车辆动力学模型则是加入了驱动车辆惯性转动扭矩和启动车辆非惯性转动扭矩。
在安全驾驶领域,二自由度车辆动力学模型可以更准确地模拟真实车辆的驾驶行为,这在事故分析和行车安全方面具有重要意义。
二自由度车辆动力学模型描述了建立汽车动力学模型所必需的参数,这些参数表征了汽车的运动特性。
根据不同的车辆结构,二自由度车辆动力学模型可以分为简化模型和综合模型,其中简化模型只包括车辆惯性特性和质量结构,而综合模型则需要将不同的惯性项和质量参数、转向设置参数和车轴系数包含在动力学模型中。
二自由度车辆动力学模型的总体模型如下:\begin{matrix}M_{1}\ddot{X}+D_{1}\dot{X}+U_{1}=K*F_{1}+U_{2} \\\M_{2}\ddot{Y}+D_{2}\dot{Y}+U_{3}=F_{2}\end{matrix}其中,$M_1$和$M_2$分别表示横向与纵向的动力质量;$D_1$和$D_2$分别表示横向与纵向的阻尼系数;$U_1$、$U_2$和$U_3$分别表示横向惯性扭矩、横向转动非惯性扭矩和纵向弹性力;$K$表示倾斜系数,用于模拟车轮对地面的抓地力;$F_1$和$F_2$表示制动转动非惯性扭矩和纵向弹性力。
通过二自由度车辆动力学模型可以计算汽车的动态行为,从而分析安全驾驶问题。
此外,这一模型也可以用于驾驶辅助系统的设计和仿真,帮助提高汽车的驾驶安全然而,二自由度车辆动力学模型实际上是基于简化参数建立的,模型参数与真实参数之间会存在一定程度的误差,因此当需要更加精确地模拟车辆行为时,这一模型可能不够准确。
另外,这种模型的可靠性也受到模型参数的设置和计算过程的限制,因此在实际应用中还需要对其进行适当的修正。
线性二自由度汽车模型的运动微分方程

线性二自由度汽车模型的运动微分方程为了便于建立运动方程,做以下简化:(1)忽略转向系统的影响,直接以前轮转角作为输入;(2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ;(3)汽车前进速度u视为不变;(4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围;(5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。
閒代后护曲轮汽车枠即及车辆咐标丟分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
"T与W为车辆坐标系的纵轴和横轴。
质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为卜。
由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为:(« + Av)sin A"=u cos A6? + cos A 0 it -vsin 0 Avsin \0考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量du dO *a -- ----- v——= n-va)x dt dt r同理得:叭"刊叫下面计算二自由度汽车的动力学方程< ------------------------------ --------------------------------------- ih二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为》禺=洛心方"二11式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:=片碣 + kya z I 工恢=ak l a ]-bk 2a 2\ 下面计算二自由度汽车的动力学方程二自由度汽车受到的外力沿 轴方向的合力与绕质心的力矩和为£幵=F”£OM+尽 11式中,呂|, F 伫为地面对前后轮的侧向反作用力,即侧偏力; 5为前轮转角 考虑到’很小,上式可以写成:*冋+k 2a 2 工虽=昭绚-风耳汽车前后轮侧偏角与其运动参数有关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
v a r u u a r = + u
v 质心侧偏角 u
3
=
武汉理工大学汽车工程学院
二自由度汽车运动微分方程式
FY m(v u r ) 1 TZ I Z r
FY FY 1 FY 2 2 TZ FY 1 a FY 2 b ar 1 u 4 r b 2 u
线性二自由度汽车模型的 动力学分析
主讲:余晨光
武汉理工大学汽车工程学院
1
FY FY 1 cos FY 2 Tz aFY 1 cos bFY 2
考虑δ角较小
cos 1
FY FY 1 FY 2 Tz aFY 1 bFY 2
FY 1 k1 1 FY 2 k2 2
武汉理工大学汽车工程学院
2
V1 Vc V1c V1Y VcY V1cY
V1Y V1 sin u tan
1
VcY V1cY v a r v a r tg u u
FY 1 k1 1 3 FY 2 k2 2
按照(4)→(3)→(2)→(1)的代入顺序,可得二 自由度汽车运动微分方程式
r (k1 k2 ) (ak1 bk2 ) k1 m(v ur ) u (ak bk ) (a 2 k b 2 k ) r ak I 1 2 1 2 1 Z r u
武汉理工大学汽车工程学院
4
思考题
• 如何得到线性二自由度汽车微分方程式?
武汉理工大学汽车工程学院
5பைடு நூலகம்
本知识点内容结束
下一知识点:稳态横摆角速度增益与稳定性因数
武汉理工大学汽车工程学院
6