富士 伺服接线图与初始化
PLC控制富士变频器多段调速、正反转、连续运行电路图(七按钮)

L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
12 11 Y3 X3 X2 X1
E03=2 E02=1 E01=0 U 30A
高速
X5 X4 X3 X2 X1 COM
Y2 Y1 Y0 COM
C05多段频率1=10Hz C06多段频率2=20Hz C08多段频率4=40Hz
30C
中速
低速 变频器 停止输出 变频器 运行输出
10 11 12 13 14 15 16 17 0 1 2 3 4 5 6 7 20 21 22 23 24 25 26 27
MELSEG
RUN 运行 Y0 停止 STOP Y2
FX2N-48MR
OUT
10 11 12 13 14 15 16Fra bibliotek17Y4
Y6
Y10
Y12
Y14
Y16
Y20
Y22
Y24
Y26
U11 V11 W11 N11
L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
Y3 Y2 Y1 Y0
变频器 停止输出 变频器 运行输出
11 X3 X2 X1 E03=2 E02=1 E01=0 U CM
F07=1s F08=1s C05多段频率1=10Hz C06多段频率2=20Hz C08多段频率4=30Hz
U11 V11 W11 N11
L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
12 11 Y3 X3 X2 X1
E03=2 E02=1 E01=0 U 30A
多段频率3
X5 X4 X3 X2 X1 COM
Y2 Y1 Y0 COM
C05多段频率1=5Hz C06多段频率2=10Hz C07多段频率3=15Hz C08多段频率4=20Hz C09多段频率5=25Hz C10多段频率6=30Hz C11多段频率7=35Hz
富士 伺服接线图与初始化

FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)驱动器侧CN2 电机侧插头P5 1 7 P5M5 2 8 M5+SIG 5 4 +SIG-SIG 6 5 -SIG外壳 3 FG二、动力线的接线驱动器侧电机侧插头U 1 1 UV 2 2 VW 3 3 W地 4 地三、相关参数设置注:设置好参数请重新上电。
四、操作说明线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF1.按MODE/ESC键多次直到面板上显示:PA012.按ENT 键1秒以上,面板显示:P1.013.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
最新富士伺服驱动器参数设定及基本操作。word版本
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
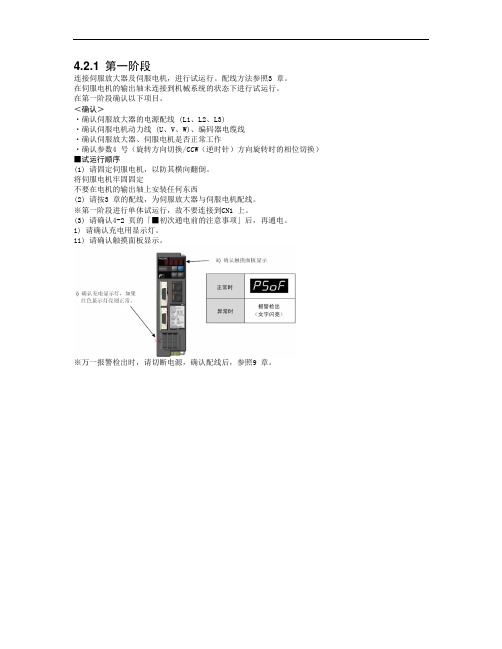
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
数控系统伺服驱动器接线及参数设定

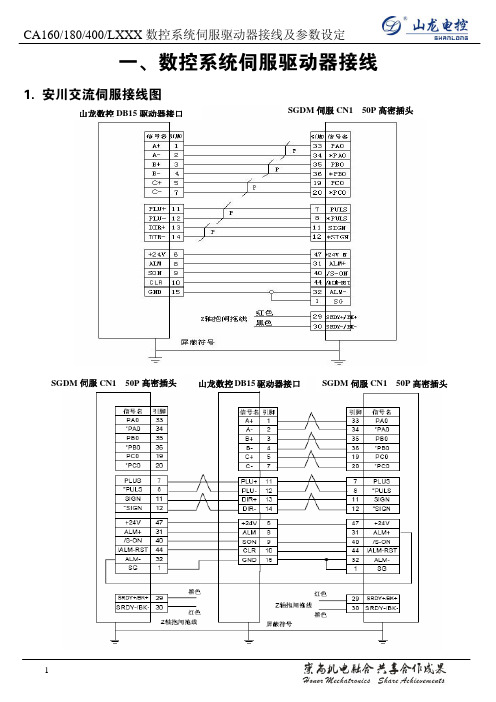
一、数控系统伺服驱动器接线1.安川交流伺服接线图山龙数控DB15驱动器接口SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头山龙数控DB15驱动器接口2.松下交流伺服接线图山龙数控DB15驱动器接口松下Minas A4/A5伺服 50P高密插头3.三菱 MR-E型伺服接线图山龙数控DB15驱动器接口三菱MR-E-A (26P高密)4. 台达ASD-A 型伺服接线图山龙数控DB15驱动器接口台达ASDA-A系列伺服器50P高密插头5. 台达ASDA-B 型伺服接线图A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDOA /OA OB /OB 10231211242512345671112131415OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型DB25(两排针孔)山龙数控DB15驱动器接口1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)6. 台达ASDA-B 型伺服接线图(双驱动器接线)DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GND OA /OA OB /OB 10231211242512345671112131415DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型山龙数控OA /OA OB /OB 102312112425DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST 17DI1+SON台达ASDA-B型1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)7. 富士伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDFFA *FFA FFB *FFB 9101112232412345671112131415富士FALDIC-β伺服(26P高密插头)FFZ *FFZ 78CA *CA 2021CB *CB 114P24M24双绞线153OUT1CON2 RST ALM CLR 810SON 92CON1 RUN8.日立伺服接线图山龙数控DB15驱动器接口日立ADA系列伺服驱动器山龙数控DB15驱动器接口三洋PY系列DB50高密插头10. 三洋 R 系列伺服接线图山龙数控DB15驱动器接口三洋R系列DB50高密插头11. 开通 KT270系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND LA LAR LB LBR 7168172526123456789101112131415开通KT270系列伺服驱动器LZ LZR 1512ALM RES 111PP PG 1019NP NG 2023COMO COM12SON双绞线12. 四通(现更名为森创)GS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND A信号差分输出+A信号差分输出-B信号差分输出+B信号差分输出-333435363132123456789101112131415四通GS系列伺服DB44针Z信号差分输出+Z信号差分输出-228故障信号输出+报警清除信号输入1227脉冲指令信号输入+脉冲指令信号输入-1328方向/脉冲指令信号输入+方向/脉冲指令信号输入-76输入公共端COM 故障信号输出-23伺服使能(伺服ON)输入21BRAKE+Z轴抱闸拖线(红)5BRAKE-Z轴抱闸拖线(黑)双绞线13. 东元 TSDA 系列伺服接线图山龙数控DB15驱动器接口东元TSDA系列伺服器50P高密插头山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SON CLRPU+PU-DR-DR+GND PA /PA PB /PB 161718192021123456789101112131415东元ESDA系列伺服DB25插头(双排)PC /PC 14ALM 45PP /PN 67DP /DN 1022+24V N241SON 双绞线CLR 2FG2515. 松下J 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND OA+OA-OB+OB-131415161718123456789101112131415松下J系列伺服驱动器26P高密插头OC+OC-83ALM A-CLR 2021PULS1PULS22223SIGN1SIGN2111COM+COM-2SRV-ON 10BRK-OFFZ轴抱闸拖线双绞线山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 333435361920123456789101112131415东菱EPS-B1系列伺服驱动器50P高密插头PZO /PZO 3145ALM A-CLR 1617PULS+PULS-2324SIGN+SIGN-471,2,32COM+GND 40SRV-ON 25BK+Z轴抱闸拖线(红)26BK-Z轴抱闸拖线(黑)双绞线17. 东菱EPS-TA 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 171815161413123456789101112131415东菱EPS-TA系列伺服驱动器DB-36P插头PZO /PZO 521ALM A-CLR 910PULS+PULS-1112SIGN+SIGN+2225COM+GND 24S-ON 7BRK-OFFZ轴抱闸拖线双绞线18. 信捷DS2-AS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND AO+AO-BO+BO-6710589123456789101112131415信捷DS2-AS系列伺服驱动器VGA-15P插头ZO+ZO-138ALM A-CLR 21P+5V P-54D+5V D-1114+24VIN COM 7/S-ON双绞线19. 欧瑞传动SD10系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO+PAO-PBO+PBO-181716153231123456789101112131415欧瑞传动SD10系列伺服器50P高密插头PZO+PZO-209ALM AL-RST 4443P+5V P-4039D+5V D-419,49GP COM 5/SONI双绞线二、伺服驱动器参数设定1.安川Σ-Ⅱ系列伺服参数设定用安川伺服驱动器,设定以下参数后,机床即可工作。
富士伺服驱动器参数设定及基本操作

4.2.1第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>?确认伺服放大器的电源配线(L1、L2、L3)?确认伺服电机动力线(U、V、W)、编码器电缆线?确认伺服放大器、伺服电机是否正常工作?确认参数4号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1)请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2)请按3章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1上。
(3)请确认4-2页的「■初次通电前的注意事项」后,再通电。
i)请确认充电用显示灯。
ii)请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9章。
请预习说明书的第4章和第8章。
5参数5.1参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM(EEPROM)中,因此,即使切断电源也不会丢失。
作为参数一览表的"变更"项目的"电源"的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7段文字显示>灯灭。
)5.1.1利用触摸面板编集的方法5-25.2参数一览表5.3参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19号的设定值,电机轴正转时,输出B相进给90°相位差2路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子[CA]、[*CA]、[CB]、[*CB]的脉冲串的形式。
最大输入频率在差动输入时为1.0[MHz],在集电极开路输入时为200[kHz]。
数控系统伺服驱动器接线及参数设定
7
BRK-OFF
-9-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
2伺服控制器的初始化设置
STET1:用USB11A接口将手提电脑和变频器连接起来 : 接口将手提电脑和变频器连接起来
伺服控制器的初始化设置
STET2:打开MOVITOOLS软件,设置相应的通讯参数 :打开 软件, 软件
语言选择英文 接口选择USB 接口选择 选择点对点连接
选择通讯速度 选择变频器型号
STET4:在参数界面中,点击“Startup”按钮,进入初始化界面, :在参数界面中,点击“ 按钮, 按钮 进入初始化界面, 点击“ 点击“Startup-Set1”
“Startup”按钮 按钮
伺服控制器的初始化设置
STET5:选择进行完全的初始化,点击“下一步” :选择进行完全的初始化,点击“下一步”
伺服控制器的初始化设置
STET9:根据实际需要,选择控制模式 :根据实际需要,
伺服控制器的初始化设置
STET10:设置系统的稳定度,负载转动惯量等参数 :设置系统的稳定度,
伺服控制器的初始化设置
STET11:监控设置和限制值设置,可以点击“Apply proposal”按钮使用 :监控设置和限制值设置,可以点击“ 按钮使用 系统推荐值
伺服控制器的初始化设置
STET3:点击”Update”按钮,当显示连接成功后点击”Cancel”按钮 :点击” 按钮, 按钮 当显示连接成功后点击” 按钮
刷新/取消按钮 刷新 取消按钮
当电脑搜索到所连变频器后,点击 按钮, 当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面 按钮
伺服控制器的初始化设置
伺服控制器的初始化设置
STET12:设置PI参数,建议点击“Apply proposal”按钮使用 :设置 参数 建议点击“ 参数, 按钮使用 系统推荐值
富士伺服驱动器全参数设定基本操作。
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线(L1、L2、L3)・确认伺服电机动力线(U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的"变更" 项目的"电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子[CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
富士伺服驱动器参数设定及基本操作。
4.2.1第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
富士伺服驱动器参数设定与基本操作
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)
驱动器侧CN2 电机侧插头
P5 1 7 P5
M5 2 8 M5
+SIG 5 4 +SIG
-SIG 6 5 -SIG
外壳 3 FG
二、动力线的接线
驱动器侧电机侧插头
U 1 1 U
V 2 2 V
W 3 3 W
地 4 地
三、相关参数设置
注:设置好参数请重新上电。
四、操作说明
线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF
1.按MODE/ESC键多次直到面板上显示:PA01
2.按ENT 键1秒以上,面板显示:P1.01
3.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想
移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,
闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参
数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化
按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
【下载本文档,可以自由复制内容或自由编辑修改内容,更多精彩文章,期待你的好评和关注,我将一如既往为您服务】。