分割器选型计算公式
分割器选型计算公式

分割器选型计算公式分割器选型计算公式2010年05月11日星期二 23:38例一、使用于间歇回转圆盘INDEXING DRIVES选用适当大小及规格之间歇分割器(INDEXING DRIVES)及所需动力之马达,请依据下列之计算,参考图一所示间歇分割器(INDEXING DRIVES)设计资料:1. 间歇分割定位等分: N=6 S :分割数2. 每等分回转时间:秒3. 入力轴之回转数:n=80rpm :凸轮轴速度(每钟回转数)4. 凸轮曲线:修正正弦曲线5. 回转盘之尺寸:O300X206. 夹具之重量:3kg /组7. 工作之重量:0.25kg /组8. 转盘依靠其底部之滑动面支持本身重量负荷,有效径:R=100(m/m)9. 夹具固定于节圆直径O200(m/m)处解答1~1 间歇分割定位等分:N=61~2 回转时间和定位时间之比为1:2,因此转位角度(INDEX ANGLE),h=360°x1/1+2=120° 1~3 入力轴之回转数:n=80rpm1~4 凸轮曲线系修正正弦曲线,因此Vm=1.76, Am=5.53, Qm=0.991~5 负载扭矩:Tt1.惯性扭矩:Tt(a)转盘重量:W1夹具重量:W2工作重量:W3 则W1=/4x302x2x7.8x1/1000=11.026(kg)W2=3x6=18(kg)W3=0.25x6=1.5(kg)(b)回转盘惯性矩:I1夹具惯性矩:I2 工作惯性矩:I3 各为I1=W1R2/2G=11.026x0.152/2x9.8=0.0126(kg x m x s2)I2=W1Re2/G=18x0.12/9.8=0.018(kg x m x s2)I3=W1Re2/G=1.5x0.12/9.8=0.0015(kg x m x s2)(c)总惯性矩:II=I1+I2+I3 I=0.0126+0.018+0.0015=0.032(kg x m x s2)(d)出力轴最大角加速度:=Amx2/Nx(360/hxn/60)2=5.53x2/6x(360/120x80/60)2=92.66(rad/s2)(e)静扭矩(惯性扭矩):TiTi=1x Ti=0.032x 92.66=2.965(kgx m)2.摩擦扭矩:TfTf=x w x R=0.15x (11.026+18+1.5) x 0.1=0.458(kgx m)3.作功扭矩:Tw在间歇分割时没有作功,因此Tw=04.以上总负载扭矩:TtTt=Ti+Tf+Tw=2.965+0.458+0=3.423(kgx m)1~6 实际负载扭矩:Te 安全负载之因数 fc=1.5Te=Tt x fc=3.423 x 1.5= 5.135(kg x m)1~7 入力轴扭矩:Tc 注:入力轴起动负载扭矩视为0,因此Tca=0Tc=360/hxN x Qm x te + Tca= 360/120x6 x 0.99 x 5.135=2.54(kg x m)1~8 计算所需之马力:PP=Tcxn/716xn(HP) 或P= Tcxn/975xn(kw) Thp=Tcxn/716xn(HP) 或P=Tcxn/975xn假设效率n=60%那么P=2.54x80/716x0.6=0.47(HP) 或P=2.54x80/975x0.6=0.34(kw)事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为1/21~9 选择适用之间歇分割器(INDEXING DRIVES)根据以上所计算之资料以及人力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。
凸轮分割器概述及选型精选PPT

3.圆柱凸轮分割器
• 圆柱凸轮分割器曲线的运动特性好, 传动是光滑连续的,振动小,噪声低, 传动平稳。
三、从动件的间歇运动形式
• 弧面凸轮分割器、平行凸轮分割器和圆柱凸轮分割器, 它们都是通过特定的凸轮带动分度盘(从动轴)运动,从 而将连续均匀的输入运动转变成有规律的间歇分度运动。 凸轮的曲线部分驱动分度盘转位,直线(圆弧)部分使分 度盘牢固自锁在准确位置。从动件可实现的间歇运动形式 如下:
2.凸轮分割器结构图
• 凸轮分割器,也习惯称间歇分割器。凸轮分割器是实现 间歇运动的机构,具有分度精度高、运转平稳、传递扭矩 大、定位时自锁、结构紧凑、体积小、噪音低、高速性能 好、寿命长等显著特点,是替代槽轮机构、棘轮机构、不 完全齿轮机构、气动控制机构等传统机构的理想产品。
二、凸轮分割器分类
1.等间进动
• 从动件回转一圈,转过的每一角度完全相 等,这种方式径D为Ø600mm,工装和工件安装直径为Ø500mm、6工位、工装重力为50N,工件重力为5N。 平面凸轮分割器是输入轴上的平面共轭凸轮与输出轴上的分度轮无间隙平行啮合的传动装置。 平面凸轮轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止,并定位自锁。 弧面凸轮轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止,并定位自锁。 通过该机构将连续的输入运动转化为间歇式的输出运动。 凸轮轴和输出轴的旋向如图所示,寿命为20000h。 弧面凸轮轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止,并定位自锁。 动作准确:无论在分割区,还是静止区,都有准确的定位。 凸轮分割器是实现间歇运动的机构,具有分度精度高、运转平稳、传递扭矩大、定位时自锁、结构紧凑、体积小、噪音低、高速性能 好、寿命长等显著特点,是替代槽轮机构、棘轮机构、不完全齿轮机构、气动控制机构等传统机构的理想产品。 平面凸轮分割器是输入轴上的平面共轭凸轮与输出轴上的分度轮无间隙平行啮合的传动装置。 选型计算实例
分割器介绍和选型

2.1曲线类型
不同曲线类型比较:
曲线名称
用途
VM
变形梯形曲线
高速轻负荷
2.00
(MT)
变形正弦曲线
中速中负荷
1.76
(MS)
变形等速曲线
低速重负荷
1.28
(MCV)
AM ±4.89 ±5.53 ±8.01
1.变形梯形曲线为最常用分割器曲线类型,其特点是最大加速度最小,因此 可以应用于高速场合。
2.变形等速曲线应用于需要速度稳定平稳的场合,但是其最大加速度大,因此 惯性最大。
分割器介绍及选型
由NordriDesign提供
包括以下几大部分:
1.分割器的介绍和原理 2.分割器的选型要点 3.分割器使用及保养
1.1分割器的介绍
1926年,美国机械师福克森生产出世界上第一台分割器。 1970年,日本三共生产出亚洲第一台。 1981年,台湾潭子精机推出国产第一台分割器,随后又出现了德士, 英特士等台湾品牌。
2.2计算范例
范例1图示
2.2范例
2.2范例
3分割器使用及保养
1.尽可能选择较大的驱动角,越大运行越平稳。 2.尽可能加装防撞装置,例如扭力限制器,设定适 当滑脱扭力。 3.定期检查油面液位,如发现低于最低值,必须及 时补充。 3.运行1000小时后第一次更换润滑油,以后每年更 换一次。
谢谢大家
2.驱动角:输入轴的有效传动部分。 • 一般有90°,120°,150°,180°,210°等,越大运行越平稳
3.曲线类型 • 可选不同加减速曲线类型
4.精度:输出轴的旋转角度精度 • 主要由零部件的加工精度和安装精度所决定,一般在±30秒,即
±0.0083°
2.1曲线类型
关于凸轮分割器的资料(自整理)

凸轮分割器凸轮分割器驱动角,又名动程角,是指输入轴驱动输出轴旋转1个工位,输入轴所旋转的角度。
静止角,是指输入轴转动而输出轴静止,输入轴所旋转的角度。
常用的驱动角有90度、120度、150度、180度、210度、240度、270度、300度、330度360度等。
二、驱动角+静止角=360度,因为输入轴旋转1圈,输出轴完成1次分割(1次分割=1次转位+1次停止)。
如上所描述,驱动角与静止角之比就是动静之比。
即决定了输出端面的转动与静止的时间比例。
因此,我们是可以根据转动时间与静止时间来选择驱动角的。
三、同时需要考虑到凸轮曲线的运动特性,驱动角越大,凸轮曲线越平缓,其运转越平稳。
因此应尽量选择驱动角度较大的凸轮分割器。
四、举例说明1:如转动时间是0.5秒,静止时间是0.5秒,应该选多大的驱动角呢,首先我们先来看动静比,即为0.5秒:0.5秒=1:1,也就是驱动角与静止角比例为1:1,因此我们推荐驱动角为180度;五、举例说明2:如转动时间为0.5秒,静止时间为1.5秒,又该怎么选呢,动静比为1:3,即驱动角与静止角之比为1:3,驱动角为90度,这个驱动角是否合适呢?从运动特性来看,其驱动角为90度下运转平稳性不好,不建议选用,最好选用驱动角为270度,静止时间需通过输入轴来延长所需要的静止时间。
因此,选择驱动角是要综合考虑动静比、驱动角曲线的运转特性等因素。
通过以上介绍,不知你是否可以选好凸轮分割器的驱动角呢。
==88888888888888888888888888888888888888888888888888888888凸轮分割器选型手册范例及计算使用场合:间歇回转圆盘选用适当大小及规格之间歇分割器及所需动力之马达,请依据下列之计算,参考图一所示的设计资料:解答如下:1-1 间歇分割定位等份:S=81-2 转位角度θ=360°×0.25/(0.25+0.5)=360°×1/3=120°1-3 入力轴之回转数:N=60/t1×θ/360=60/0.25×120/360=80rpm1-4 凸轮曲线是变形正弦曲线,因此Vm=1.76,Am=5.53,Qm=0.9871-5 负载安全系数fe=1.81-6 摩擦系数μ=0.2(1)惯性扭力:Ti(a)转盘重量:W1,夹具重量:W2,工件重量:W3,则:W1=л×20²×3×7.85×1/1000=29.59KgW2=4×8=32KgW3=0.5×8=4Kg(b)回转盘惯性矩:I1,夹具惯性矩:I2,工件惯性矩:I3,各为:I1=W1R1²/2G=29.59×0.2²/2×9.8=0.060kgf.m.s²I2=W2R2²/G=32×0.15²/9.8=0.0735kgf.m.s²I3=W3R3²/G=4×0.15²/9.8=0.00992kgf.m.s²(c)总惯性矩:II=I1+I2+I3=0.060+0.0735+0.0092=0.1427kgf.m.s²因为是单道程,m=ITi=226.2Am×I.N²/S(θ/m)²=226.2×5.53×0.1427×80²/8×120²=9.916kgf.m (2)摩擦扭矩:TfTf=μ.W.R=0.2×(29.59+32+4)×0.15=1.968kgf.m(3)工作扭矩:Tw在间歇分割时没有作功,因此Tw=0(4)以上总负载扭矩:TtTt=Ti+Tf+Tw=9.916+1.9968+0=11.884kgf.m实际负载扭矩:Te=Tt.fe=11.884×1.8=21.391kgf.m入力轴扭矩:Tc,注:入力轴起动负载扭矩视为0,因此Tca=0Tc=360/θ.S×Qm×Te=360/(120×8)×0.987×21.391=7.917kgf.m计算所需之马力,假设马达的效率为60%,则:P=Tc×N×9.8/9550×0.6=7.917×80×9.8/9550×0.6=1.083kw事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力:Pa=P×1/2=1.083×1/2=0.542kw(5)选择适用之间歇分割器根据以上所计算之资料以及入力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。
分割器选型计算
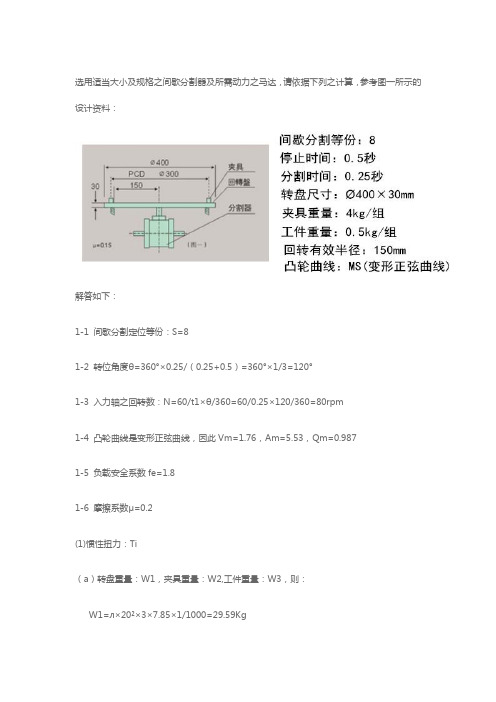
选用适当大小及规格之间歇分割器及所需动力之马达,请依据下列之计算,参考图一所示的设计资料:解答如下:1-1 间歇分割定位等份:S=81-2 转位角度θ=360°×0.25/(0.25+0.5)=360°×1/3=120°1-3 入力轴之回转数:N=60/t1×θ/360=60/0.25×120/360=80rpm1-4 凸轮曲线是变形正弦曲线,因此Vm=1.76,Am=5.53,Qm=0.9871-5 负载安全系数fe=1.81-6 摩擦系数μ=0.2(1)惯性扭力:Ti(a)转盘重量:W1,夹具重量:W2,工件重量:W3,则:W1=л×20²×3×7.85×1/1000=29.59KgW2=4×8=32KgW3=0.5×8=4Kg(b)回转盘惯性矩:I1,夹具惯性矩:I2,工件惯性矩:I3,各为:I1=W1R1²/2G=29.59×0.2²/2×9.8=0.060kgf.m.s²I2=W2R2²/G=32×0.15²/9.8=0.0735kgf.m.s²I3=W3R3²/G=4×0.15²/9.8=0.00992kgf.m.s²(c)总惯性矩:II=I1+I2+I3=0.060+0.0735+0.0092=0.1427kgf.m.s²因为是单道程,m=ITi=226.2Am×I.N²/S(θ/m)²=226.2×5.53×0.1427×80²/8×120²=9.916kgf.m (2)摩擦扭矩:TfTf=μ.W.R=0.2×(29.59+32+4)×0.15=1.968kgf.m(3)工作扭矩:Tw在间歇分割时没有作功,因此Tw=0(4)以上总负载扭矩:TtTt=Ti+Tf+Tw=9.916+1.9968+0=11.884kgf.m实际负载扭矩:Te=Tt.fe=11.884×1.8=21.391kgf.m入力轴扭矩:Tc,注:入力轴起动负载扭矩视为0,因此Tca=0Tc=360/θ.S×Qm×Te=360/(120×8)×0.987×21.391=7.917kgf.m计算所需之马力,假设马达的效率为60%,则:P=Tc×N×9.8/9550×0.6=7.917×80×9.8/9550×0.6=1.083kw事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力:Pa=P×1/2=1.083×1/2=0.542kw(5)选择适用之间歇分割器根据以上所计算之资料以及入力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。
凸轮分割器选型计算及应用实例

目录一:产品介绍与外型选购1.弧面凸轮分割器(1)介绍(2)型式选定参数(3)外形图及尺寸(4)技术参数表2.平行凸轮分割器(1)介绍(2)型式选定参数(3)外形图及尺寸(4)技术参数表3.圆柱凸轮分割器(1)介绍(2)示意外形图4.凸轮及模具制作二:选型范例三:新品推荐。
凸轮间歇机构广泛应用在制药机械、印刷机械、包装机械、玻璃机械、陶瓷机械、烟草机械、机床加工中心、自动送料机等需要把连续运转转化为步进动作的各种自动化机械上。
该产品具有步进定位精度高、高速运转平稳、传递扭矩大、定位时自锁等显著优点,是替代槽轮机构、不完全齿轮机构、棘轮机构等传统间歇机构的最理想产品。
“一:产品介绍与外型选择1、弧面凸轮分割器“弧面凸轮分割器”是输入轴上的空间立体凸轮与输出从动轴上的从动滚子无间隙啮合形成的机构。
其特点是:凸轮基面为圆弧回转体,从动滚子轴线与输出轴垂直,并与凸轮轴线处在同一平面内。
凸轮廓面的曲线段驱使分割盘转位,直线段使分割盘静止并自锁。
通过该机构将连续的输入回转运动转化为间歇的步进输出运动。
该种类型的分割器由于精度高、速度快、扭矩大、体积小等显著特点,广泛应用于各种需要步进驱动的自动组合机,加工机械,金属加工器械,输送机步进驱动,包装机,食品机械,分装设备,医药器械,自动检测机,挤压入料装置,以及在其他工业使用的间歇分割机。
弧面凸轮分割器按照输出轴的输出类型分为:轴式、法兰式、平台桌面式.型式选定需提供如下参数:1.中心距(即输入轴与输出轴间的距离):45、50、63、70、80、83、100、110、125、140、150、160、175、180、200、250、3502.分割数:2、3、4、5、6、8、9、10、12、16、24、32、……3.动程角:90°;120°;180°;240°;270°;300°等4.凸轮旋向:右旋R为标准型、左旋L(见下图)5.曲线类型:(1)MS曲线(优选变正弦曲线,标准)、(2)MT 曲线、(3)MCV曲线、(4)按用户要求曲线。
凸轮分割器选型

凸轮曲线系修正正弦曲线,因此负载扭矩计算Tt1.惯性扭矩:Tt(a)转盘重量:W 1 夹具重量:W 2 工作重量:W 3 则W1=99.879318W2=56W3=0(b)回转盘惯性矩:I 1 夹具惯性矩:I 2 工件惯性矩:I 3 各为I 1=W 1R 2/2GI1= 1.03191642I 2=W 1Re 2/GI2=0.05714286I 3=W 1Re 2/GI3=0(c)总惯性矩:II=I 1+I 2+I 3I= 1.08905928(d)出力轴最大角加速度:Am×2/N×(360/h×n/60)239.089358(e)静扭矩(惯性扭矩):Ti 以下为自动计算分割器选型计Ti=Ti=42.57062812. 摩擦扭矩:TfTf=Tf= 2.338189773. 作功扭矩:Tw在间歇分割时没有作功,因此Tw=0Tw=04.以上总负载扭矩:TtTt=Ti+Tf+Tw Tt=44.9088179实际负载扭矩:Te 安全负载之因数fc fc= 1.5Te=Tt x fc Te=67.3632268入力轴扭矩:Tc 注:入力轴起动负载扭矩视为0,因此Tca=0Tca=0Tc=360/(h×N) × Qm × te + Tca Tc=25.0085979计算所需之马力:PP=Tc×n/716×n(HP) 或 P= Tc×n/975×n(kw) Thp=Tc×n/716×n(HP) 或 P=Tc×n/975×n 假设效率n=60%那么P= 3.49282094P= 2.5649844事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为1/2选择适用之间歇分割器(INDEXING DRIVES)根据以上所计算之资料以及入力轴之转数n rpm来选择,请参考说明书上所记载,凡是出力Vm:最大非向性速度Am:最大非向性之加速度Qm:凸轮轴最大扭力系数:角加速度h:入力轴转位(驱动)角度N: 分割数秒转位时间(仅回转时间)rpm凸轮轴速度(每分钟回转数) 修正正弦曲线cm单位为cm cm单位为cm g/cm3单位为g/cm3kg/组kg/组m100mm处m支撑处直径200mm °秒常数:pi=3.1416G=9.8Am=5.53Qm=0.99kgkgkg(kg x m x s2)rad/s2kg x m x s2kg x m x s2kg x m x s2选型计算公式如下参数取夹具重心到转盘轴心距离的2倍回转时间和定位时间之比选为1:2,因此转位角度h=360°x1/1+2=120°包括回转时间和停止时间kg· mkg· mkg· m一般取1.5~2对照分割器参数表选取>Te值的型号kg x mkg x mP=Tc×n/975×nHPkw是出力轴扭矩高于以上所计算之Te值者均可选用。
分割器选型计算公式

分割器选型计算公式2010年05月11日 星期二 23:38例一、 使用于间歇回转圆盘INDEXING DRIVES选用适当大小及规格之间歇分割器(INDEXING DRIVES)及所需动力之马达,请依据下列之计算,参考图一所示间歇分割器(INDEXING DRIVES)设计资料:1. 间歇分割定位等分: N=6 S :分割数2. 每等分回转时间:秒3. 入力轴之回转数:n=80rpm :凸轮轴速度(每钟回转数)4. 凸轮曲线:修正正弦曲线5. 回转盘之尺寸:O300X206. 夹具之重量:3kg /组7. 工作之重量:0.25kg /组8. 转盘依靠其底部之滑动面支持本身重量负荷,有效径:R=100(m/m)9. 夹具固定于节圆直径O200(m/m)处解答1~1 间歇分割定位等分:N=61~2 回转时间和定位时间之比为1:2,因此转位角度(INDEX ANGLE),h=360°x1/1+2=120° 1~3 入力轴之回转数:n=80rpm1~4 凸轮曲线系修正正弦曲线,因此Vm=1.76, Am=5.53, Qm=0.991~5 负载扭矩:Tt1.惯性扭矩:Tt(a)转盘重量:W1夹具重量:W2工作重量:W3 则W1=/4x302x2x7.8x1/1000=11.026(kg)W2=3x6=18(kg)W3=0.25x6=1.5(kg)(b)回转盘惯性矩:I1夹具惯性矩:I2 工作惯性矩:I3 各为I1=W1R2/2G=11.026x0.152/2x9.8=0.0126(kg x m x s2)I2=W1Re2/G=18x0.12/9.8=0.018(kg x m x s2)I3=W1Re2/G=1.5x0.12/9.8=0.0015(kg x m x s2)(c)总惯性矩:II=I1+I2+I3 I=0.0126+0.018+0.0015=0.032(kg x m x s2)(d)出力轴最大角加速度:=Amx2/Nx(360/hxn/60)2=5.53x2/6x(360/120x80/60)2=92.66(rad/s2)(e)静扭矩(惯性扭矩):TiTi=1x Ti=0.032x 92.66=2.965(kgx m)2.摩擦扭矩:TfTf=x w x R=0.15x (11.026+18+1.5) x 0.1=0.458(kgx m)3.作功扭矩:Tw在间歇分割时没有作功,因此Tw=04.以上总负载扭矩:TtTt=Ti+Tf+Tw=2.965+0.458+0=3.423(kgx m)1~6 实际负载扭矩:Te 安全负载之因数 fc=1.5Te=Tt x fc=3.423 x 1.5= 5.135(kg x m)1~7 入力轴扭矩:Tc 注:入力轴起动负载扭矩视为0,因此Tca=0Tc=360/hxN x Qm x te + Tca= 360/120x6 x 0.99 x 5.135 =2.54(kg x m)1~8 计算所需之马力:PP=Tcxn/716xn(HP) 或 P= Tcxn/975xn(kw) Thp=Tcxn/716xn(HP) 或P=Tcxn/975xn假设效率n=60%那么P=2.54x80/716x0.6=0.47(HP) 或 P=2.54x80/975x0.6=0.34(kw)事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为1/21~9 选择适用之间歇分割器(INDEXING DRIVES)根据以上所计算之资料以及人力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3~1 间歇分割定位等分:N=6
3~2 转位角度 h=120°
3~3 入力转数:n=80rpm
3~4 凸轮曲线系修正之正弦曲线,因此 Vm=1.76,Am=5.53,Qm=0.99
3~5 负载扭矩:Tt (1) 静扭矩(惯性扭矩):Ti (a) 小齿轮惯性矩:I1,大齿轮惯性矩:I2,治具惯性矩:I3 I1=WR2/2G=3x0.06252/2x9.8=0.00059(kgxmxs2) I2=WRe2/2G=20x0.252/2x9.8=0.063(kgxmxs2) I3=WR2/2G=120x0.22/9.8=0.48(kgxmxs2) (b) 出力轴最大角加速度: 1=Amx2 /Nx(360/ hxn/60)2=5.53x2 /6x(360/120x80/60)2=92.66(rad/S2) 2=Amx2 /Nx(360/ hxn/60)2=5.53x2 /24x(360/120x80/60)2=23.16(rad/S2) (c) 静扭矩(惯性扭矩):T1(Ti1xTi2) Ti1=I1 1xTi1=0.00059x92.66=0.054(kgxm) Ti2=(I2+I3)(N/N1)2 2(N1/N)=(0.063+0.48)x(6/24)2x23.16x(24/6)=3.14(kgxm) Ti=Ti1+Ti2=0.054+3.14=3.19(kgxm) (2) 摩擦扭矩:Tf Tf=U.W.R.(N/N1)=0.2X(120+20)X0.2X(120+20)X0.2X(6/24)=1.4(kgxm) (3) 作功扭矩:Tw 在间歇分割时没有作功,因此 Tw=0 (4) 以上总负载扭矩:Tt Tt=Ti+Tf+Tw=3.19+1.4+0=4.59(kgxm)
1. 惯性扭矩:Tt (a)转盘重量:W1 夹具重量:W2 工作重量:W3 则 W1= /4x302x2x7.8x1/1000=11.026(kg) W2=3x6=18(kg) W3=0.25x6=1.5(kg) (b)回转盘惯性矩:I1 夹具惯性矩:I2 工作惯性矩:I3 各为 I1=W1R2/2G=11.026x0.152/2x9.8=0.0126(kg x m x s2) I2=W1Re2/G=18x0.12/9.8=0.018(kg x m x s2) I3=W1Re2/G=1.5x0.12/9.8=0.0015(kg x m x s2) (c)总惯性矩:I I=I1+I2+I3 I=0.0126+0.018+0.0015=0.032(kg x m x s2) (d)出力轴最大角加速度: =Amx2 /Nx(360/ hxn/60)2=5.53x2 /6x(360/120x80/60)2=92.66(rad/s2) (e)静扭矩(惯性扭矩):Ti Ti=1x Ti=0.032x 92.66=2.965(kgx m)
1~9 选择适用之间歇分割器(INDEXING DRIVES) 根据以上所计算之资料以及人力轴之转数 80rpm 来选择,请参考说明书上所记载, 凡是出力轴扭矩高于以上所计算之 Te 值者均可选用。
Vm:最大非向性速度 Am:最大非向性之加速度 Qm:凸轮轴最大扭力系数
:角加速度 h:入力轴转位(驱动)角度 :摩擦系数 :速度比 :角速度(弧度/秒) :角加速度(弧度/秒 2)
(b) 输送带之有效摩擦扭矩:Tfe
Tfe=Tf(n/m)=41.9x 180/100=75.43(kgxcm) 2~6 作功扭矩:Tw
在间歇分割时没有作功,因此 Tw=0 2~7 负载扭矩:Tt
Tt=Ti+Tf+Tw=344.12+75.43+0=419.55(kgxcm)=4.19(kgxm) 注:请认明所有数值单位为公分或公尺,以免错误,重力引力加速度 G=980 公分 /秒 2=9.8 米/秒 2 2~8 实际负荷之矩:Te,安全负荷之因数 fe=2 Te=Ttx fc=4.19 x 2=8.38 2~9 入力轴扭矩:Tc Tc=360/Nx 1/ h x Qm x Te + Tca 注:入力轴起动负载扭矩视为 ,因 Tca=0 Tc=360/6 x 1/120 x 0.99 x 8.38 +0 =4.14 2-10 计算所需之马力:P P=Tcxn/716xn(HP) 或 P=Tcxn/975xn(kw) 假设马达效率 n=60% P=4.14x30/716x0.6=0.28(HP)或 P=4.14x30/975x0.6=0.212(kw) 事实上,以上所计算之值为起动时之最大马力,而实际运转所需马力为计算值 1/2。 2-11 选择所适用之间歇分割器(INDEXING DRIVES) 根据以上计算资料所得人力轴为 30rpm,参考目录上各种之资料及扭矩来选择 INDEXING DRIVES 之规格。 Te=8.38(kgxm)应选 RU-80DS 例三、 使用于间接传动回转圆盘选用适当大小及规格之间歇分割器(INDEXING DRIVES)
(c) 输送带之有效总惯性矩:IBe IBe=IB(n/m)2=8.056x(180/100)2=26.10(kg x cm x s2)
(d) 总惯性矩为(a)+(c)之和 I=IA+IBe=0.331+26.10=26.43(kg x cm x s2)
(e) 出入轴最大角加速度: =Amx 2 /N(360/ h x n/60)2 = 5.53 x 2 /6(360/120 x
30/60)2=13.02(rad s2)
(f) 静扭矩(惯性扭矩):Ti 应为(d)项与(e)项相乘,因此 Ti=I x =26.43x13.02=344.12(kg x cm)
2~5 摩擦扭矩:Tf
(a) 输送带上之摩擦扭矩: 摩擦负荷应等于滑动面上链条和夹具的一半重量和工作全部重量所造成之 摩擦力。 Tf= xWxR=0.15x(10/2+0.7x20/2+10x2/2) x 12.7=41.9(kgxcm)
解答 1~1 间歇分割定位等分:N=6 1~2 回转时间和定位时间之比为 1:2,因此转位角度(INDEX ANGLE),
h=360°x1/1+2=120° 1~3 入力轴之回转数:n=80rpm 1~4 凸轮曲线系修正正弦曲线,因此 Vm=1.76, Am=5.53, Qm=0.99
1~5 负载扭矩:Tt
3~6 实际负载扭矩:Te 安全负载之因数 fc=1.5
Te=Ttxfc=4.59x1.5=6.885(kgxm)
3~7 入力轴扭矩:Tc 注:入力轴起动负载扭矩视为 0,因此 Tca=0 Tc=360/ hxhxQmxTe+Tca=360/6x120x0.99x6.885=3.4
3~8 计算所需之马力:P P=Tcxn/716xn(HP)或 P=Tcxn/975xn(kw) 假效效率 n=60%那么 P=3.4x80/716x0.6=0.63(HP)或 P=3.4x80/975x0.6=0.46(kw) 事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为 1/2
(2) 传动轴之惯性矩: I3=W3 x R2/2G=4x2.52/2x980= 0.026(kg x cm x s2 )
(3) 链轮之惯性矩:I4 I4=W4(R2+r2)/2G=5x(12.72+2.52)/2x98Байду номын сангаас x 4 =1.71(kg x cm x s2)
(4) 链条之惯性矩:I5 I5=W5 x Re2/G = 10 x 12.72x/980 x 2 =3.29(kg x cm x s2)
分割器选型计算公式 2010 年 05 月 11 日 星期二 23:38
例一、使用于间歇回转圆盘 INDEXING DRIVES
选用适当大小及规格之间歇分割器(INDEXING DRIVES)及所需动力之马达,请依 据下列之计算,参考图一所示
间歇分割器(INDEXING DRIVES)设计资料:
1. 间歇分割定位等分: N=6 S:分割数
例二、 间歇分割器(INDEXING DRIVES)应用在传送带之状况。
间歇分割器配合出力轴之齿轮装置应用于传动输送带,而使输送带移动之计算如 下:
设计资料: (1)输送带输送间距:239m/m (2)回转角度: h=120° (3)每行程运转时间 2 秒/周期 (4)速度比 =180/100=(n/m) (5)凸轮曲线:修正正弦曲线
2. 摩擦扭矩:Tf Tf= x w x R=0.15x (11.026+18+1.5) x 0.1=0.458(kgx m)
3. 作功扭矩:Tw 在间歇分割时没有作功,因此 Tw=0
4. 以上总负载扭矩:Tt Tt=Ti+Tf+Tw=2.965+0.458+0=3.423(kgx m)
1~6 实际负载扭矩:Te 安全负载之因数 fc=1.5 Te=Tt x fc=3.423 x 1.5= 5.135(kg x m)
注: Dc:输送齿盘之节径 Pc:输送带之横向节距
:速度比
解答 2~1 间歇分割定位等分:N
N= x Dc x /Pc= x 25.4x 1.8/23.9 = 6
2~2 设定 2 秒/周期时入力轴回转数 N=60/2=30rpm
2~3 凸轮曲线系修正正弦曲线,因此 Vm=1.76, Am=5.53, Qm=0.99
3~9 选择适用之间歇分割器(INDEXING DRIVES) 根据以上所计算之资料及入力轴之转数 80rpm 来选择,请参考说明书上所记载, 凡是出力轴扭矩高于以上所计算之 Te 值者均可适用。因为 Te=6.885(kgxm) 所以 应采用 RU-80DS
2. 每等分回转时间:秒 3. 入力轴之回转数:
n=80rpm:凸轮轴速度 钟回转数) 4. 凸轮曲线:修正正弦曲 5. 回转盘之尺寸:O300X 6. 夹具之重量:3kg/组 7. 工作之重量:0.25kg 8. 转盘依靠其底部之滑动 支持本身重量负荷,有 径:R=100(m/m) 9. 夹具固定于节圆直径 O200(m/m)处