YAMAHA贴片机DOS版本详细参数用设置
YAMAHA贴片机DOS版本详细参数用设置word版本

Y A M A H A贴片机D O S 版本详细参数用设置A1 OPTION CONFIG 機器的基本配置資訊A2 ROM CONFIG 記憶體資訊A3 FILE CONFIG 系統程式資訊A7 MACHING MTN.UTL. 機器運作的使用資訊A8 FLYING NOZZLE INF. 旋轉式更換吸嘴的規格/BASIC CONF./Sub Machine Type 機器所屬的規格/RECOGNITION/Ext.TC-A 用於YTF100/YTF100AExt.TC-B 用於YTF31Ext.TC-C 用於YTF80WExc.tc Trv. Axis 外部Tray電車站與Mount機的X軸方向,一般設定為NormalTrayChange Pos. 取料起始座標的計算Front 由前到後的計算方式Rear 由後到前的計算方式/OPTIONS/Nozzle Changer 自動更換吸嘴的功能Slide Plate FES 移動式的FEEDER台車Co-Planarity SensorDispense Data 是否顯示與點膠有關的資料Disappear 不顯示Appear 顯示Dot Station QFP零件的拋料輸送帶RS232C extensionOption EditScreen Saver 自動儲存功能None 無此功能1Min. 以1分鐘為單位作一次儲存動作5Min. 以5分鐘為單位作一次儲存動作10Min. 以5分鐘為單位作一次儲存動作Feeder Group 供料器的種類,一般設定為FV TYPEPS1 Vision糸列包含YV100 YV1OOII YV1OOIIe YVL80 YVL88 YVL88II YV112 YV64 YV64D YV100D HSD PS2 X糸列包含YV100-X YV100-XT YV100-XG YV100-XTG YV180-X YV88-X YV88-XG HSD-XConveyor Width 軌道寬度自動調整的功能,除YV100Iie的機型外,一般均有配置此功能Precede Pick Sensor 當軌道的Sensor有所應應時即優先取料的功能此功能是否開放使用,將由客戶自行決定,但需注意的是,此功能不得與BAD Mark共同存在的情況下使用/OPTIONS/Dump Station QFP零件拋料時的傳送皮帶一般而言,機器如配有外部Tray時,均有加此配備顯示機器的序號顯示檔案連結的狀態Check Function Status 確認機器大檢點的狀況Display Item List 顯示激磁開關使用次數Edit Count Value 激磁開關使用次數的計算編輯提醒use作好定期的保養Password:specialist當機器顯示有如下的訊息時的排除方式到3/1/A7 MACHING MTN.UTL./ Edit Count Value 輸入Password並找到有顯示標記的行列,並將其歸零即可旋轉式更換吸嘴的規格及吸嘴的設定B1 HEAD SPEC.INF. 各個Head可以使用的Nozzle規格B2 FEEDER PLATE INF. 各料站可以使用何種規格的供料器B3 NOZZLE SPEC.INF. 各種零件所適合使用的吸嘴規格B4 FEEDER SPEC.INF. 設定各種供料器的中心位置及取料延遲時間B6 DISPENSE. SEQ.INF. 屬於點膠機的設定B7 DISPENSE. COR.INF. 屬於點膠機的設定B0 EXIT 離開各個Head可以使用的Nozzle規格0 表示允許使用的規格各料站可以使用何種規格的供料器吸嘴取料的延遲時間Component 資料中的點膠頭資料轉換設定用各零件適合的吸嘴設定各零件適合的吸嘴設定設定各種feeder的左右尺寸,將會直接影晌自動編排時feeder的站別各種feeder的取料延遲時間CAMERAMulti CAM. 1 Z Component 與 Camera 的最佳焦距高度,意即零件辯視時的高度Multi CAM. 1 R Multi Camera 與Head的相對角度誤差值(約為0.00+/-0.80)Multi CAM. 1 Size 允許零件X,Y的最大尺寸最大尺寸為32mmMulti CAM. 1 Z 允許零件厚度的最大尺寸YV100X為7mm YV88X為10mmMulti CAM. 1 Light Spc 使用的光源規格HEADDOWN OFFSETX,Y 各Head的偏差值可經由Auto Mount FeedBack調整出來HeadType 各Head的辨識規格Fore表示光源由下往上照,零件祗辨示白色或可反光者Back表示光源由上往下照,零件祗辨示陰影(祗使用於YVL88/80糸列的機器)Las 表示使用Laser,零件利用Laser投影方式辨示本體陰影(祗使用於YVL88/80糸列的機器)FineMode 各Head使用Single CAMERA的可行性Possible 表示使用Inpossible 表示不使用HEADVacuum Level 真空吸力的設定Offset 各吸嘴頭對應head1的相對距離Down Offset 2-8號頭的偏差補貨值Nozzle Correction 1號頭的偏差補償值R Axis Accuracy 各頭在0度90度180度270度時的角度偏差補償值NozzleCorrectionHead No 著裝頭的編號X/Y 各著裝頭的料中心偏差補償值,經由Auto MountFeedBack調整出來,一般如使用MountFeedBack是無法作出Head2~Head8的參數OFFSETHead Type 設定Head是否Auto Nozzle ChangingAutoNzlChg 是Auto NozzleChanging規格ManualNzlChg 是手換Nozzle,亦屬於Fixed Nozzle規格Fixed Nozzle 是Fixed Nozzle規格None 設定Head不使用nozzle 目前Head上使用Nozzle的規格Head 1 可使用TYPE-71.72.73.74.76Head 3.5 可使用TYPE-71.72.73Head 2.4.6.8 可使用TYPE-71.72Head 7 可使用TYPE-71.72.73.76(ForMELF-L)X.Y 以Head-1為主,以各Head為坐標中心,分別告知Head-1的位置標準誤差為±0.3mmZ 各Head高度偏差,以Head-1為主, 各Head分別告知其與Head-1之誤差R Axis Accuracy 2各著裝頭在0度,180度,90度,-90度時的角度偏差補償值由3/3/B1 /R Axis Accuracy調整時所設定出VACUUMLow level 使用72號吸嘴或62號吸嘴時,空吸時最低真空值由3/3/B1 /Vacuum Level /Pick Vacuum調整設定出High level 使用72號吸嘴或62號吸嘴時,吸零件時最高的真空值由3/3/B1 /Vacuum Level /Mount Vacuum調整設定出AirClutch L AirClutch HLASER Laser Unit鐳射中心的計算,X全糸列均已取消鐳射的裝置,故已不再作此部份的設定MACHINEFeederPlateOffsePlate No. 設定組群Total 每多少支Feeder為一個組群DatumNo. 指定那一站為起始座標X,Y 設定座標中心(以0603-8mm料帶的零件封裝孔中心為主) Z 設定零件的取料高度(8mm Feeder凹槽最高點為準,再減0.6mm) MACHINEPositionFINE angle /Type CAMERA的解析能力,一般設定為0.03,但亦有設定0.04Mulit camera /Type Intermit為各機的標準設定/Y camera的辨視速度,YV100II之標準值為900,YV100則為700Locate pin /X,Y 定位pin固定梢的中心座標(PCB的基本原點)..R->L流向則為最左邊的定位pin..L->R流向則為最右邊的定位pinEdge Clamp /X,Y PCB以夾邊定位時,最接近Locate pin邊角的位置(PCB的基本原點)Wait point /Type 設定當程式執行完畢後,Head回到等待位置時,是否有吐氣拋料的動作(NORMAL 表示一般的狀態,意即不吐氣.Discard)Wait point /X,Y 設定當程式執行完畢後,Head等待PCB位置時,此位置必需考慮到安全性,方便性,以及Head是否拋料等的因數Discard point /Type 拋料設定(NORMAL,100,300,500. NORMAL一般的設定,500拋料的時間及吹氣的時間均為最大Discard point /X,Y Domp Pos.拋料的位置(以Head1為主)Discard point /Z 拋料時Head的高度,必需考慮IC零件的完好性及Head的安全性Discard point /Feeder 機台上可供使用的Feeder站數PCB/Fix.TF /Z 基板定位後的高度(意即等於Head取料的高度) PCB/Fix.TF /R 此設定必需與PCB/Fix.TF /Z之設定相同固定Tray的高度Retry Limit 取料不良,或零件辨視不良時最大的重覆取料次數Dump Station 1 /X,Y QFP零件不良拋料軌道的座標(以Head1為主) Dump Station 1 /Z QFP零件不良拋料的高度Dump Station 1 /Feeder 拋料軌道所接的氣門及訊號組Dump Station2/X,Y,Z,Feeder 第二組QFP零件不良拋料的軌道,一般而言並不作以下的設定Moving height Moving Camera的高度設定,一般將其設定為0.00mm如設定該參數後,mount hight將導致計算錯誤,而出現Z axis limit over,因為MovingCamera 為固定的高度,並不會隨Z軸上下移動Software Limit+direct. 伺服馬達的正極限值-direct. 伺服馬達的負極限值X.Y.Z AXIS伺服馬達的正,負極限值是以limit sensor為主Software Limit與limit sensor的距離標準距離為5mm,最小距離為0.5mm(limit sensor為最終的距離)Init.Pos 伺服馬達歸零時的位置Init.Mov 伺服馬達正常工作時的位置LZ/T.C. ATS20 Magazine上下的伺服馬達LH/T.C. ATS20 Hook前進後退的伺服馬達PS ATS & YTF糸列均有其額外的設定,必需針對其特性而加以設定OTHEROtherRS-232C PortRS-232傳輸設定此設定為指定設定值,非特別情況下,不得作任何的修改STATIONNozzle Station機器本身如果沒有配置自動更換吸嘴功能者,即可以不作此部份的設定Nzl. Station No. 吸嘴電車站的I/O位置X,Y 交換吸嘴時的位置以Head 1的座標為主,再分別依各頭實際去測試交換吸嘴時,所需的座標Z 交換吸嘴時,頭組必需下降的深度R 交換吸嘴時,Head所需旋轉的角度Nzl.Type 吸嘴的規格,設定錯誤的話,會直接易影晌吸嘴交換與著裝的批配性Head No. 專屬使用的吸嘴頭STATIONTRAY CHANGERCoordinate(因為馬達運算的關係故為負號)YTF80W及ATS20已不再需要跳格放金屬盤Magazine 1/Start Magazine中第一盤Tray的代號Magazine 1/End Magazine中放置最後一盤Tray的代號PS 1 如果要讓YTF能一次送出兩個零件的話,就必需將Component Info.中的Dump Pos.設定成為Dump Pos機器設定的丟料位置或Station放到專用的電車道上而不可設成Sp.Dump Back放回原來取料的地方TRAY CHANGERMCDATA_SORT 3 MCH_ADJUSTA1 VACUUM ON 真空吸力全開A2 VACUUM OFF 真空吸力全關A3 PICK COMPONENTA4 DUMP COMPONENT 將Head上所吸的零件全數丟到拋料盒內A5 CHANGE NOZZLE 更換吸嘴A6 HEAD DOWN VALVE 測試Head的電磁閥及動作是否正常Downwerd進入後按Enter,數值在30以下,Upwerd進入後按S+Enter,數值在14以下如超過可能為Packing損壞,或電磁閥損壞Packing KM1-M7141-00X *2Packing KM1-M7140-000 *1A7 CHANG SPEED 變更五段的速度A8 SEARCH ORIGIN 回原點S+Enter可以看到伺服馬達回原點的百分比,正常值為50% ±5%B1 ADJUST TARGET 系統調整或修改B2 SAVE DATA 儲存資料B3 RECOVER ADJUST 回覆調整前的參數B4 CONDITION OF TCHB5 * 伺服馬達的IP測試Password B6 ** 馬達移動時間的測量Password B7 QUIT 離開但不作儲存B0 SAVE & QUIT 儲存並離開4 MANUALB1 SELECT SERVO MOTOR選擇要移動的軸[AXIS]B2 RUNNING SPEED [SPEED] 選擇移動的速度B3 POINT MOVE X,Y軸快速的移動到那一點B6 INIT.SERVO ORIGIN 機械回原點(Shaft + Enter強迫回原點並可看到回原點的百分比)B0 EXIT FROM MANUAL 離開。
YAMAHA贴片机操作教程
YAMAHA贴片机操作教程第一节:贴片机的基本原理贴片机是电子制造中常用的自动插件设备,用于将电子元器件精确地安装在印刷电路板上。
贴片机的组成部分:1.供料系统:负责将元器件供给到贴片机的作业区;2.视觉定位系统:用图像采集和处理技术,准确地确定元器件和PCB 的位置;3.移动部分:控制贴片头在x、y、z方向上的移动,实现元器件稳定的贴片操作;4.贴片头:将元器件安装在PCB上的部件;5.控制系统:负责整个设备的控制和管理。
第二节:贴片机的操作步骤1.准备工作a.检查并确认贴片机的状态,确保设备正常;b.准备好需要安装的元器件和PCB板。
2.设置工作参数a.开启贴片机,并进入系统设置界面;b.根据需要设置工作参数,如贴片速度、吸嘴尺寸、吸嘴压力等。
3.调试校准a.运行自动校准程序,让贴片机自动检测和调整各个部件的位置和运动范围,以保证贴片的准确性;b.根据实际需要进行手动调整和校准,以进一步提高贴片的精度。
4.载入元器件库a.将元器件库文件导入贴片机系统;b.按照元件库中的信息,设置相应的元件参数,如类型、尺寸、引脚数等。
5.载入工程文件a.将需要贴片的PCB文件导入贴片机系统;b.根据实际需要设置PCB文件的参数,如尺寸、引脚数、层数等。
6.设置吸嘴和供料a.根据元器件的尺寸和类型,选择适当的吸嘴,并将其安装到贴片机上;b.调整供料系统,确保元器件正常供给到贴片机的作业区。
7.开始贴片a.执行自动贴片程序,让贴片机按照设定的参数和顺序进行贴片;b.观察贴片过程中的各项指标,如贴位精度、吸嘴压力等。
8.检查贴片质量a.完成贴片后,对贴片质量进行检查,确保元器件的位置、方向和焊接状况等符合要求;b.如发现问题,及时进行调整和修复。
9.结束操作a.关闭贴片机及相关设备,并清理工作区域;b.根据需要保存相关的工程文件和数据。
第三节:贴片机操作的注意事项1.在操作贴片机前,确保操作人员已经接受过相关的培训,熟悉相关的操作规程和安全注意事项。
YAMAHA-YV100Ⅱ-SMT贴片机操作教学文案
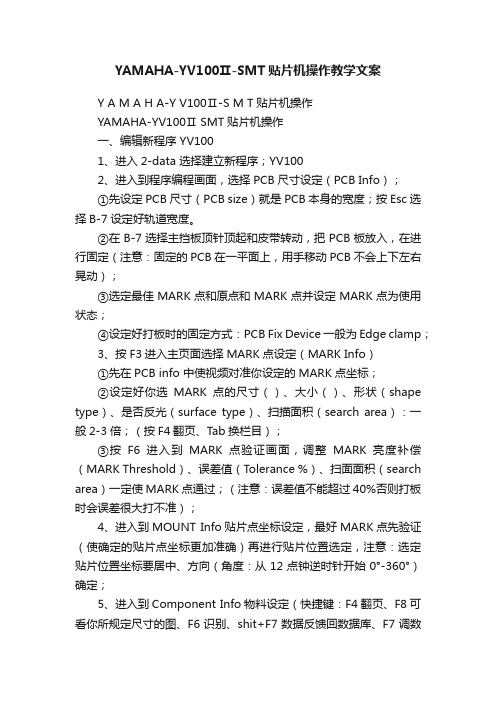
YAMAHA-YV100Ⅱ-SMT贴片机操作教学文案Y A M A H A-Y V100Ⅱ-S M T贴片机操作YAMAHA-YV100Ⅱ SMT贴片机操作一、编辑新程序 YV1001、进入2-data 选择建立新程序;YV1002、进入到程序编程画面,选择PCB尺寸设定(PCB Info);①先设定PCB尺寸(PCB size)就是PCB本身的宽度;按Esc选择B-7设定好轨道宽度。
②在B-7选择主挡板顶针顶起和皮带转动,把PCB板放入,在进行固定(注意:固定的PCB在一平面上,用手移动PCB不会上下左右晃动);③选定最佳MARK点和原点和MARK点并设定MARK点为使用状态;④设定好打板时的固定方式:PCB Fix Device 一般为Edge clamp;3、按F3进入主页面选择MARK点设定(MARK Info)①先在PCB info 中使视频对准你设定的MARK点坐标;②设定好你选MARK点的尺寸()、大小()、形状(shape type)、是否反光(surface type)、扫描面积(search area):一般2-3倍;(按F4翻页、Tab换栏目);③按F6进入到MARK点验证画面,调整MARK亮度补偿(MARK Threshold)、误差值(Tolerance %)、扫面面积(search area)一定使MARK点通过;(注意:误差值不能超过40%否则打板时会误差很大打不准);4、进入到MOUNT Info贴片点坐标设定,最好MARK点先验证(使确定的贴片点坐标更加准确)再进行贴片位置选定,注意:选定贴片位置坐标要居中、方向(角度:从12点钟逆时针开始0°-360°)确定;5、进入到Component Info物料设定(快捷键:F4翻页、F8可看你所规定尺寸的图、F6识别、shit+F7数据反馈回数据库、F7调数据库、A3查看数据库、F8可以看自己画的图、A4查看元件封装):取名称,可用游标卡尺测出物料的X轴、Y轴、Z轴方向的长度并写入,按F6选择站台放入物料选择吸嘴进行验证;经验分享:①物料可直接调用选项:530-539 铝电容;550-572钽电容;600-615三极管;620-622三极管;699-725 IC芯片;520-527MELF二极管(数字从小到大封装依次增大);②吸嘴:31 的选择 1608/3216/2125;32 的选择4532/5650/7343/MELF;33的选择SOP20.封装:0805对应2125;1206对应3216;0603对应1608;0402对应1005.③取料高度,一般情况可设置为是:电阻0.2mm;二极管0.8-1.0(正朝下、负朝上)④编辑IC芯片物料:首先注意扫描的角度和你所画的图(F8)是不是在同一个方向,不是可设置取料角度(pick angle deg)使物料和你所画的图在同一个方向再进行验证;IC的一些设定,Lead Number N:N向零件的脚数;Lead Number E:E向零件的脚数;。
雅马哈贴片机操作手册

YAMAHA_Xg系列贴片机编程一、基本概念在PCB的坐标系中,有PCB原点(board/offset/board origin)和拼块原点(board/offset/block origin)。
1.PCB原点(board/offset/board origin)。
PCB原点坐标值是指PCB原点相对于固定定位针中心的距离。
原则上,PCB原点可以在PCB上的任何位置,PCB原点坐标为(0,0)即PCB原点与固定定位针中心重合。
**注意:当机器传送方向从右向左时,固定定位针中心对应的PCB定位孔距离PCB左下角为(5.00mm,5.00mm);当机器传送方向从左向右时,固定定位针中心对应的PCB定位孔距离PCB右下角为(5.00mm,5.00mm)。
一般设定PCB原点坐标为(0,0)。
当然亦可设定为其他值。
例如,当机器传送方向从右向左时,对一块300MMX200MM的PCB,设定PCB原点坐标为(295.00,-5.00)即以PCB 的右下角为PCB原点,。
又例如,当机器传送方向从左向右时,对一块300MMX200MM 的PCB,设定PCB原点坐标为(-295.00,-5.00)即以PCB的左下角为PCB原点。
2.拼块原点(board/offset/block origin)。
拼块原点是指每个拼块上所有的点的的坐标原点,原则上可以在拼块的任何位置,拼块原点坐标值是以PCB原点为坐标原点,拼块原点坐标为(0,0)即该拼块的原点与PCB原点重合。
拼块原点最好选取拼块中某个焊盘的中心或边角,不要选取丝印字符或孔中心。
3.PCB原点和拼块原点的关系。
首先,拼块原点坐标值是以PCB原点为坐标原点。
另外,PCB原点可以在PCB的任何地方,而拼块原点最好在小拼块中。
如果将PCB原点定在第一个拼块的原点位置,则PCB原点坐标值为该点到固定定位针中心的XY距离,第一拼块的拼块原点坐标为(0,0)。
*每个PCB板程序包括PCB信息子文件(board/board)、贴装信息子文件(board/ mount)、原器件信息子文件(parts)、标记信息子文件(parts)、拼块原点信息子文件(board/offset)、局部标记信息子文件(local fid. Mark inf.)和局部坏标记信息子文件(local bad mark inf.)。
YAMAHA贴片机DOS版本详细参数用设置
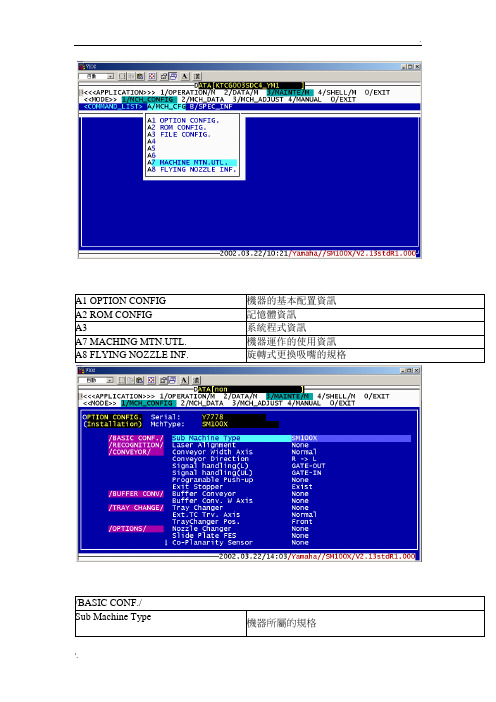
A1 OPTION CONFIG 機器的基本配置資訊A2 ROM CONFIG 記憶體資訊A3 系統程式資訊A7 MACHING MTN.UTL. 機器運作的使用資訊A8 FLYING NOZZLE INF. 旋轉式更換吸嘴的規格/BASIC CONF./Sub Machine Type機器所屬的規格Nozzle Changer自動更換吸嘴的功能Slide Plate FES 移動式的FEEDER台車Co-Planarity SensorDispense Data是否顯示與點膠有關的資料Disappear 不顯示Appear 顯示Dot StationQFP零件的拋料輸送帶RS232C extensionOption EditScreen Saver自動儲存功能None 無此功能1Min. 以1分鐘為單位作一次儲存動作5Min. 以5分鐘為單位作一次儲存動作10Min. 以5分鐘為單位作一次儲存動作Feeder Group供料器的種類,一般設定為FV TYPEPS1Vision糸列包含YV100 YV1OOII YV1OOIIe YVL80 YVL88 YVL88II YV112 YV64 YV64D YV1 PS2X糸列包含YV100-X YV100-XT YV100-XG YV100-XTG YV180-X YV88-X YV88-XG HSD-X顯示機器的序號顯示檔案連結的狀態Check Function Status確認機器大檢點的狀況Display Item List顯示激磁開關使用次數Edit Count Value激磁開關使用次數的計算編輯提醒use作好定期的保養Password:specialist當機器顯示有如下的訊息時的排除方式到3/1/A7 MACHING MTN.UTL./ Edit Count Value 輸入Password並找到有顯示標記的行列,並將其歸零即可旋轉式更換吸嘴的規格及吸嘴的設定B1 HEAD SPEC.INF.各個Head可以使用的Nozzle規格B2 FEEDER PLATE INF.各料站可以使用何種規格的供料器B3 NOZZLE SPEC.INF.各種零件所適合使用的吸嘴規格B4 FEEDER SPEC.INF.設定各種供料器的中心位置及取料延遲時間B6 DISPENSE. SEQ.INF.屬於點膠機的設定B7 DISPENSE. COR.INF.屬於點膠機的設定B0 EXIT離開各個Head可以使用的Nozzle規格0 表示允許使用的規格各料站可以使用何種規格的供料器吸嘴取料的延遲時間Component 資料中的點膠頭資料轉換設定用各零件適合的吸嘴設定各零件適合的吸嘴設定設定各種feeder的左右尺寸,將會直接影晌自動編排時feeder的站別各種feeder的取料延遲時間CAMERAMulti CAM. 1 Size允許零件X,Y的最大尺寸最大尺寸為32mmMulti CAM. 1 Z 允許零件厚度的最大尺寸YV100X為7mm YV88X為10mm Multi CAM. 1 Light Spc 使用的光源規格HEADDOWN OFFSETX,Y 各Head的偏差值可經由Auto Mount FeedBack調整出來HeadType 各Head的辨識規格Fore表示光源由下往上照,零件祗辨示白色或可反光者Back表示光源由上往下照,零件祗辨示陰影(祗使用於YVL88/80糸列的機器)Las 表示使用Laser,零件利用Laser投影方式辨示本體陰影(祗使用於YVL88/80糸列的機器)FineMode 各Head使用Single CAMERA的可行性Possible 表示使用Inpossible 表示不使用Vacuum Level 真空吸力的設定Offset各吸嘴頭對應head1的相對距離Down Offset 2-8號頭的偏差補貨值Nozzle Correction 1號頭的偏差補償值R Axis Accuracy各頭在0度90度180度270度時的角度偏差補償值著裝頭的編號Head NoX/Y 各著裝頭的料中心偏差補償值,經由Auto MountFeedBack調整出來,一般如使用Mount FeedBack是無法作出Head2~Head8的參數OFFSETMELF-L)X.Y 以Head-1為主,以各Head為坐標中心,分別告知Head-1的位置標準誤差為±0.3mmZ 各Head高度偏差,以Head-1為主, 各Head分別告知其與Head-1之誤差各著裝頭在0度,180度,90度,-90度時的角度偏差補償值由3/3/B1 /R Axis Accuracy調整時所設定出VACUUMLow level使用72號吸嘴或62號吸嘴時,空吸時最低真空值由3/3/B1 /Vacuum Level /Pick Vacuum調整設定出High level使用72號吸嘴或62號吸嘴時,吸零件時最高的真空值由3/3/B1 /Vacuum Level /Mount Vacuum調整設定出AirClutch LAirClutch HLASERLaser Unit鐳射中心的計算,X全糸列均已取消鐳射的裝置,故已不再作此部份的設定MACHINEFeederPlateOffse設定組群Plate No.Total 每多少支Feeder為一個組群指定那一站為起始座標DatumNo.設定座標中心X,Y(以0603-8mm料帶的零件封裝孔中心為主)設定零件的取料高度Z(8mm Feeder凹槽最高點為準,再減0.6mm) MACHINEPositionFINE angle /Type CAMERA的解析能力,一般設定為0.03,但亦有設定0.04 Mulit camera /Type Intermit為各機的標準設定/Y camera的辨視速度,YV100II之標準值為900,YV100則為700Locate pin /X,Y 定位pin固定梢的中心座標(PCB的基本原點)..R->L流向則為最左邊的定位pin..L->R流向則為最右邊的定位pinEdge Clamp /X,Y PCB以夾邊定位時,最接近Locate pin邊角的位置(PCB的基本原點)Wait point /Type 設定當程式執行完畢後,Head回到等待位置時,是否有並不會隨Z軸上下移動+direct. 伺服馬達的正極限值-direct. 伺服馬達的負極限值X.Y.Z AXIS伺服馬達的正,負極限值是以limit sensor為主Software Limit與limit sensor的距離標準距離為5mm,最小距離為0.5mm(limit sensor為最終的距離)Init.Pos 伺服馬達歸零時的位置Init.Mov 伺服馬達正常工作時的位置LZ/T.C. ATS20 Magazine上下的伺服馬達LH/T.C. ATS20 Hook前進後退的伺服馬達PS ATS & YTF糸列均有其額外的設定,必需針對其特性而加以設定OTHEROtherRS-232C PortRS-232傳輸設定此設定為指定設定值,非特別情況下,不得作任何的修改STATIONNozzle StationNzl. Station No.吸嘴電車站的I/O位置X,Y 交換吸嘴時的位置以Head 1的座標為主,再分別依各頭實際去測試交換吸嘴時,所需的座標Z 交換吸嘴時,頭組必需下降的深度R交換吸嘴時,Head所需旋轉的角度Nzl.Type 吸嘴的規格,設定錯誤的話,會直接易影晌吸嘴交換與著裝的批配性Head No. 專屬使用的吸嘴頭TRAY CHANGERCoordinateS tation 1 /X,Y零件的電車站,在著裝機內的位置,YTF80W共有4個電車站,可使用Mov.Camera作Teaching(ATS20因為Hook Z是固定的,故不作此設定) Magazine 1/coord.2 Magazine中的金屬盤每盤的間距(因為馬達運算的關係故為負號)YTF80W及ATS20已不再需要跳格放金屬盤Magazine 1/Start Magazine中第一盤Tray的代號Magazine 1/End Magazine中放置最後一盤Tray的代號PS 1 如果要讓YTF能一次送出兩個零件的話,就必需將Component Info.中的Dump Pos.設定成為Dump Pos機器設定的丟料位置或Station放到專用的電車道上而不可設成Sp.Dump Back放回原來取料的地方TRAY CHANGERMCDATA_SORT3 MCH_ADJUSTA1 VACUUM ON 真空吸力全開A2 VACUUM OFF 真空吸力全關A3 PICK COMPONENTA4 DUMP COMPONENT將Head上所吸的零件全數丟到拋料盒內A5 CHANGE NOZZLE 更換吸嘴A6 HEAD DOWN VALVE測試Head的電磁閥及動作是否正常Downwerd進入後按Enter,數值在30以下,Upwerd進入後按S+Enter,數值在14以下如超過可能為Packing損壞,或電磁閥損壞Packing KM1-M7141-00X *2Packing KM1-M7140-000 *1A7 CHANG SPEED 變更五段的速度A8 SEARCH ORIGIN 回原點S+Enter可以看到伺服馬達回原點的百分比,正常值為50% ±5%B1 ADJUST TARGET 系統調整或修改B2 SAVE DATA 儲存資料B3 RECOVER ADJUST 回覆調整前的參數B4 CONDITION OF TCHB5 *伺服馬達的IP測試PasswordB6 **馬達移動時間的測量Password B7 QUIT 離開但不作儲存B0 SAVE & QUIT 儲存並離開4 MANUALA1 INPUT/OUTPUT MONITOR螢幕上顯示I / O訊號0代表OFF 1代表ONOUTPUT為輸入之訊號,主要作用為啟動電子控制之動作INPUT為輸出之電子訊號A2 FEEDER OUT MONITOR供料器以I/O的方式使其動作A3 COMP.LIGHT OUT MONITORA4 VACUUM IN MONITOR以數位化的方式顯示真空值,一般均以31,51,62,72等規格的吸嘴作測試CORRENT裝上吸嘴後的空吸狀態,為檢查吸嘴是否堵塞31的正常值不超過140其餘的正常值不超過110MAXIMUM吸取零件後的值,檢查EJECTOR是否衰退,此數值除YVL80/88糸列外,最低不得低於160MINIMUM取下吸嘴後的數值,檢查Shaft Nozzle是否堵塞,一般而言,此數值不超過50A5 CHANGE NOZZLE更換吸嘴,此功能僅適用於配有Auto Nozzle Chang功能的機器A6 ATS/YTF PALETTETRAY盤的拉取ATS糸列均為娃娃機,背在主機的後面,像似母親背著娃娃YTF糸列為外部TRAY,是在主機以外的另一機台,肩具有檢查站的功能A0 CONVEYOR UNITS有關軌道的手動調整部份。
YAMAHA(雅马哈)贴片机编程培训教材

标记设定OK,点击编辑。
4
7.基板标记启用设定
2020/11/2
使用鼠标勾选基板,点击 OK,启用PCB板标记使 用。
4
8.元件物料制定
2020/11/2
鼠标点击“元件”数据画 面。
4
8.元件物料制定
2020/11/2
进入画面后,点击元件栏, 对应BOM输入相对应元件 料号。同时设定元件的基 本信息—吸料—贴料—识 别—形状,另可根据物料 的种类调用相对应数据库。
2020/11/2
优化完成后,点击关闭优 化程序窗口,完成优化操 作。
4
14.程式的备份及拷贝
2020/11/2
画面自动跳转至主控画面, 鼠标点击 “基板资源管 理器”。
4
14.程式的备份及拷贝
2020/11/2
在基板资源管理器中点击 媒体。
4
14.程式的备份及拷贝
2020/11/2
选择所需拷入程序存放的 优盘,点击OK
YAMAHA贴片机编程培训教材
2020/11/2
程序制作流程
2020/11/2
1
1.1建立基板名-创建程序名称
2020/11/2
在主画面中用鼠标点击 “创建基板”按扭进入创 建基板画面。
2
1.2建立基板名-创建程序名 称
2020/11/2
1.2.1进入“创建基板” 对话框后,在基板名空格 中输入需要创建的程序名。 1.2.2创建完成后点击OK 按扭进入到“基板设置” 对话框 。 注:该名称一般与BOM 中的机种名一致。
4
3.轨道宽度调整
2020/11/2
在传送装置中,点击“传 送宽度”。
4
3.轨道宽度调整
yamaha贴片机操作教程
机种交换时清洁※为防止设备异常,
能正常进行生产,延 长设备的使用寿命, 须对设备进行日常的 清洁
设备外部表面的清洁:用干净 的无尘纸擦拭设备表面的灰尘 ,锡膏等异物,清洁设备周围 地面。并维持设备表面及周围 地面的清洁度。 白夜班交替时清洁
白夜班交替时清洁 设备内部的清洁:清洁 设备内部散落的资材至 散料盒统一区分 送料器台的清洁:首先用刷子从送料器
SMT 常 见 不 良 分 析 及 对 策
• • • • • • • • CHIP翘件(错位): 原因分析:1.CARRIER粘贴不良,FPCB没有贴在凹槽内 2.SOLDER印刷不良、错位,MARK识别参数不良 3.MOUNT贴片错位、NOZZLE,FEEDER,元件识别尺寸参数,BLOCK,贴片坐标
程 序 编 辑 ---元 件 信 息 (COMPONRNT INFO) <1>
元件数据库号
16MM飞达
元件名 称
FEEDER类型 所需吸嘴型号
FEEDER设定的站位
FEEDER设定的相关位置 设定X,Y方向值 不可大于或小于0.2MM
相同的资财,机器可以互用
程 序 编 辑 --- 元 件 信 息(COMPONRNT INFO) <2>
E.方向元件引脚数量 E.方向元件引脚长度 E.方向元件引脚宽度 两个元件引脚之间的间距
程 序 编 辑 ---贴 装 信 息 (MOUNT INFO)
元件位置号
贴装坐标参数
贴装角度参数
局部不良MARK
YAMAHA 贴片机操作者级别及密码设定
YAMAHA 贴片机操作者级别及密码设定目的和意义:操作者用各自的身份级别及操作密码登陆机器后,当某个错误出现时,该操作员的名字将被自动记录到错误日志里,让问题的跟进及处理变得相对容易。
请参考下图:操作者级别及密码设定步骤:1:在主画面中点击应用程序设定:2:打开设置画面后,点击操作者设置按钮,在操作者窗口中即可进行操作者的各项操作,包括各级别的操作者的添加/删除,密码的修改等各项操作,请参考下图。
在组名的下拉列表中有操作者,管理者和服务者三个组,客户仅能使用操作者和管理者两个组,服务者是提供给YAMAHA或YAMAHA代理商的专业服务人员使用。
(注:组是用来分类注册操作者方便用的,在管理者和操作者之间并没有功能方面的不同,只是方便管理,所以下面仅做操作者设置的说明,管理者的设置与操作者的设置一样),操作者组可注册多达100个操作人员。
只有在登陆到level 10的管理员级别下才可以注册或删除操作者。
3:添加操作者:在操作者窗口中点击“添加”按钮,在操作者编辑画面中输入操作者的名字,输入密码,并在下面的密码确认栏中输入同样的密码,在下面的组中选择所归属的组,在级别(level)下拉列表中选择所需要德级别(在0 ~ 10之间选择)。
做完所有的设定后点击OK完成。
请参考下图。
4:删除操作者:在操作者窗口画面中选择所需要删除的操作者并点击点击删除按钮,在弹出的确认画面中点击OK,即可删除相应的操作者,如下图。
5:编辑操作者:在操作者窗口画面中选择所要编辑的操作者并点击点击编辑按钮,可以修改所需要的项目,包括操作者名字,密码,组别以及级别(level).6:操作级别(level)编辑:点击级别编辑将弹出级别定义对话框,点击右边级别下拉列表选择相应的级别。
最左边的方框中是树形功能菜单,右边方框中为相应菜单下的功能选项,可在相应的选项中勾选相应级别的功能选项,请参考下图:以上每一个级别(level)设置用户可根据自身要求进行定义,级别(level)包含0~10共11个级别,不过yamaha为每一个级别(level)都有一个默认的级别定义,请参考下表附录。
(雅马哈)贴片机操作指导书
2.4 PCB 生产开始,如果贴片期间发生故障,及时处置,
继续贴片。
5.定期保养,保持机器清洁,
2.5 元件贴装完成,检查贴片结果是否与 SAMPLE 和 运行正常。
BOM 相符。
2.6 批量生产的产品,经 AOI 检查后,准备过回流焊。
6.集成电路属易被静电损坏之
3
停止机器运 3.1 生产结束,退出各项显示及系统运用,按异常停止 器件,接触时注意戴防静电环。
XX 有限公司
贴片机操作指导书
机器名称:雅马哈贴片机
机型:
设备编号:
项次 操作步骤
操作说明
操作条件及注意事项
1
开启机器
1.1 开启主机电源,按 YPU 的 [READY]按钮开伺服。 1.操作期间如遇紧急情况,可按
机器紧急停止按钮。
2
操作方法
2.1 选择所需的 PCB 数据,检查周围安全 ,执行回原 2.机器出现故障,马上通知生行来自钮,清屏幕显示,关主电源。
3.2 清洁机器,做好维护保养事项。
备注:
编制:
审核:
核准:
点。
产技术人员排除。
2.2 执行暖机操作,如停机时间较短(2 小时或更少),
无须暖机。
3.检查供料器安装位置是否与
2.3 按 [F2] 键选取所要生产的 PCB 名,然后在 YPU 上 排料单相符。
按[RUN]键或选择执行 [1/1/A2/AUTO RUNNING],机
器开始自动操作。
4.生产时,应及时放板取板。
雅马哈YAMAHA贴片机,贴装程序编程教材
5.BADMARK
BADMARK”等参数的设定和调试。
几种常用Bad Mark概念: Board Bad Mark: 定义用于判断整块PCB是否贴装的Bad Mark;Block Bad Mark:定义用 于判断某一拼板是否贴装元件的Bad Mark;Local Fid.:在整板程序中 用于判断某一个元件是否贴装的Bad Mark Edit: 点击该按钮可以选择是否使用以上所述各种Bad Mark。 * 上图中表格里的X、Y、值分别表示定义的各个的坐标。 Mark: 该列数字表示前面X、Y坐标定义的Bad Mark在“Mark”参数中对应的行号。
YAMAHA程序组成培训教材 程序组成培训教材
1
P1
目
录
主 界 面介绍 一个程式主要由如下几项构成: 一个程式主要由如下几项构成 1. Board (基板)参数 2. MOUNT (贴装)参数 3. OFFSET (拼板)参数 4. FIDUCIAL MARK (光学点参考点)参数 5. BADMARK (光学坏点)参数 6. Part (元件)参数 7. Optimizer (程序的转换及优化)
board基板参数mount贴装参数offset拼板参数fiducialmark光学点参考点参数badmark光学坏点参数part元件参数optimizer程序的转换及优化setup生产计划origin原点board基板warmupmonitor监控器cyclestop贴装周期停止parts元件conveyoutstop轨道上传出后停止mis生产记录halfwaycontinue中途运行mark标记setupmove生产移动unitlog历史记录history生产记录unit装置softwaresetting软件设置operator操作者swversion软件版本save保存requiredparts必需的元件editor编辑step分步运行optimizer优化boardexplorer基板资源管理器utilities调整requirednozzles需要的吸嘴machine机器设置database数据库help帮助systembackup系统备份off关机create新建speed速度编程11pcbdata程式的创建111pcb名称输入112pcb板参数输入boardsizex
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A1 OPTION CONFIG 機器的基本配置資訊A2 ROM CONFIG 記憶體資訊A3 FILE CONFIG 系統程式資訊A7 MACHING MTN.UTL. 機器運作的使用資訊A8 FLYING NOZZLE INF. 旋轉式更換吸嘴的規格/BASIC CONF./Sub Machine Type機器所屬的規格Nozzle Changer自動更換吸嘴的功能Slide Plate FES 移動式的FEEDER台車Co-Planarity SensorDispense Data是否顯示與點膠有關的資料Disappear 不顯示Appear 顯示Dot StationQFP零件的拋料輸送帶RS232C extensionOption EditScreen Saver自動儲存功能None 無此功能1Min. 以1分鐘為單位作一次儲存動作5Min. 以5分鐘為單位作一次儲存動作10Min. 以5分鐘為單位作一次儲存動作Feeder Group供料器的種類,一般設定為FV TYPEPS1Vision糸列包含YV100 YV1OOII YV1OOIIe YVL80 YVL88 YVL88II YV112 YV64 YV64D YV1 PS2X糸列包含YV100-X YV100-XT YV100-XG YV100-XTG YV180-X YV88-X YV88-XG HSD-X顯示機器的序號顯示檔案連結的狀態Check Function Status確認機器大檢點的狀況Display Item List顯示激磁開關使用次數Edit Count Value激磁開關使用次數的計算編輯提醒use作好定期的保養Password:specialist當機器顯示有如下的訊息時的排除方式到3/1/A7 MACHING MTN.UTL./ Edit Count Value 輸入Password並找到有顯示標記的行列,並將其歸零即可旋轉式更換吸嘴的規格及吸嘴的設定B1 HEAD SPEC.INF.各個Head可以使用的Nozzle規格B2 FEEDER PLATE INF.各料站可以使用何種規格的供料器B3 NOZZLE SPEC.INF.各種零件所適合使用的吸嘴規格B4 FEEDER SPEC.INF.設定各種供料器的中心位置及取料延遲時間B6 DISPENSE. SEQ.INF.屬於點膠機的設定B7 DISPENSE. COR.INF.屬於點膠機的設定B0 EXIT離開各個Head可以使用的Nozzle規格0 表示允許使用的規格各料站可以使用何種規格的供料器吸嘴取料的延遲時間Component 資料中的點膠頭資料轉換設定用各零件適合的吸嘴設定各零件適合的吸嘴設定設定各種feeder的左右尺寸,將會直接影晌自動編排時feeder的站別各種feeder的取料延遲時間CAMERAMulti CAM. 1 Size允許零件X,Y的最大尺寸最大尺寸為32mmMulti CAM. 1 Z 允許零件厚度的最大尺寸YV100X為7mm YV88X為10mm Multi CAM. 1 Light Spc 使用的光源規格HEADDOWN OFFSETX,Y 各Head的偏差值可經由Auto Mount FeedBack調整出來HeadType 各Head的辨識規格Fore表示光源由下往上照,零件祗辨示白色或可反光者Back表示光源由上往下照,零件祗辨示陰影(祗使用於YVL88/80糸列的機器)Las 表示使用Laser,零件利用Laser投影方式辨示本體陰影(祗使用於YVL88/80糸列的機器)FineMode 各Head使用Single CAMERA的可行性Possible 表示使用Inpossible 表示不使用Vacuum Level 真空吸力的設定Offset各吸嘴頭對應head1的相對距離Down Offset 2-8號頭的偏差補貨值Nozzle Correction 1號頭的偏差補償值R Axis Accuracy各頭在0度90度180度270度時的角度偏差補償值著裝頭的編號Head NoX/Y 各著裝頭的料中心偏差補償值,經由Auto MountFeedBack調整出來,一般如使用Mount FeedBack是無法作出Head2~Head8的參數OFFSETMELF-L)X.Y 以Head-1為主,以各Head為坐標中心,分別告知Head-1的位置標準誤差為±0.3mmZ 各Head高度偏差,以Head-1為主, 各Head分別告知其與Head-1之誤差各著裝頭在0度,180度,90度,-90度時的角度偏差補償值由3/3/B1 /R Axis Accuracy調整時所設定出VACUUMLow level使用72號吸嘴或62號吸嘴時,空吸時最低真空值由3/3/B1 /Vacuum Level /Pick Vacuum調整設定出High level使用72號吸嘴或62號吸嘴時,吸零件時最高的真空值由3/3/B1 /Vacuum Level /Mount Vacuum調整設定出AirClutch LAirClutch HLASERLaser Unit鐳射中心的計算,X全糸列均已取消鐳射的裝置,故已不再作此部份的設定MACHINEFeederPlateOffse設定組群Plate No.Total 每多少支Feeder為一個組群指定那一站為起始座標DatumNo.設定座標中心X,Y(以0603-8mm料帶的零件封裝孔中心為主)設定零件的取料高度Z(8mm Feeder凹槽最高點為準,再減0.6mm) MACHINEPositionFINE angle /Type CAMERA的解析能力,一般設定為0.03,但亦有設定0.04 Mulit camera /Type Intermit為各機的標準設定/Y camera的辨視速度,YV100II之標準值為900,YV100則為700Locate pin /X,Y 定位pin固定梢的中心座標(PCB的基本原點)..R->L流向則為最左邊的定位pin..L->R流向則為最右邊的定位pinEdge Clamp /X,Y PCB以夾邊定位時,最接近Locate pin邊角的位置(PCB的基本原點)Wait point /Type 設定當程式執行完畢後,Head回到等待位置時,是否有並不會隨Z軸上下移動+direct. 伺服馬達的正極限值-direct. 伺服馬達的負極限值X.Y.Z AXIS伺服馬達的正,負極限值是以limit sensor為主Software Limit與limit sensor的距離標準距離為5mm,最小距離為0.5mm(limit sensor為最終的距離)Init.Pos 伺服馬達歸零時的位置Init.Mov 伺服馬達正常工作時的位置LZ/T.C. ATS20 Magazine上下的伺服馬達LH/T.C. ATS20 Hook前進後退的伺服馬達PS ATS & YTF糸列均有其額外的設定,必需針對其特性而加以設定OTHEROtherRS-232C PortRS-232傳輸設定此設定為指定設定值,非特別情況下,不得作任何的修改STATIONNozzle StationNzl. Station No.吸嘴電車站的I/O位置X,Y 交換吸嘴時的位置以Head 1的座標為主,再分別依各頭實際去測試交換吸嘴時,所需的座標Z 交換吸嘴時,頭組必需下降的深度R交換吸嘴時,Head所需旋轉的角度Nzl.Type 吸嘴的規格,設定錯誤的話,會直接易影晌吸嘴交換與著裝的批配性Head No. 專屬使用的吸嘴頭TRAY CHANGERCoordinateS tation 1 /X,Y零件的電車站,在著裝機內的位置,YTF80W共有4個電車站,可使用Mov.Camera作Teaching(ATS20因為Hook Z是固定的,故不作此設定) Magazine 1/coord.2 Magazine中的金屬盤每盤的間距(因為馬達運算的關係故為負號)YTF80W及ATS20已不再需要跳格放金屬盤Magazine 1/Start Magazine中第一盤Tray的代號Magazine 1/End Magazine中放置最後一盤Tray的代號PS 1 如果要讓YTF能一次送出兩個零件的話,就必需將Component Info.中的Dump Pos.設定成為Dump Pos機器設定的丟料位置或Station放到專用的電車道上而不可設成Sp.Dump Back放回原來取料的地方TRAY CHANGERMCDATA_SORT3 MCH_ADJUSTA1 VACUUM ON 真空吸力全開A2 VACUUM OFF 真空吸力全關A3 PICK COMPONENTA4 DUMP COMPONENT將Head上所吸的零件全數丟到拋料盒內A5 CHANGE NOZZLE 更換吸嘴A6 HEAD DOWN VALVE測試Head的電磁閥及動作是否正常Downwerd進入後按Enter,數值在30以下,Upwerd進入後按S+Enter,數值在14以下如超過可能為Packing損壞,或電磁閥損壞Packing KM1-M7141-00X *2Packing KM1-M7140-000 *1A7 CHANG SPEED 變更五段的速度A8 SEARCH ORIGIN 回原點S+Enter可以看到伺服馬達回原點的百分比,正常值為50% ±5%B1 ADJUST TARGET 系統調整或修改B2 SAVE DATA 儲存資料B3 RECOVER ADJUST 回覆調整前的參數B4 CONDITION OF TCHB5 *伺服馬達的IP測試PasswordB6 **馬達移動時間的測量Password B7 QUIT 離開但不作儲存B0 SAVE & QUIT 儲存並離開4 MANUALA1 INPUT/OUTPUT MONITOR螢幕上顯示I / O訊號0代表OFF 1代表ONOUTPUT為輸入之訊號,主要作用為啟動電子控制之動作INPUT為輸出之電子訊號A2 FEEDER OUT MONITOR供料器以I/O的方式使其動作A3 COMP.LIGHT OUT MONITORA4 VACUUM IN MONITOR以數位化的方式顯示真空值,一般均以31,51,62,72等規格的吸嘴作測試CORRENT裝上吸嘴後的空吸狀態,為檢查吸嘴是否堵塞31的正常值不超過140其餘的正常值不超過110MAXIMUM吸取零件後的值,檢查EJECTOR是否衰退,此數值除YVL80/88糸列外,最低不得低於160MINIMUM取下吸嘴後的數值,檢查Shaft Nozzle是否堵塞,一般而言,此數值不超過50A5 CHANGE NOZZLE更換吸嘴,此功能僅適用於配有Auto Nozzle Chang功能的機器A6 ATS/YTF PALETTETRAY盤的拉取ATS糸列均為娃娃機,背在主機的後面,像似母親背著娃娃YTF糸列為外部TRAY,是在主機以外的另一機台,肩具有檢查站的功能A0 CONVEYOR UNITS有關軌道的手動調整部份。