机器人手臂机构设计课题汇总
多自由度机器人机械手臂结构设计方法研究
机器人自由度是机器人机构能够独立运动的关节数目。
多自由度机器人机械手臂结合了人工智能、机构与机器运动学等技术,能够稳定而精确地进行位置控制,是较为复杂的综合系统。
基于此,本文设计了一种结构简单且灵活程度较高的机器人机械手臂,该多自由度机器人机械手臂有较好的鲁棒性,符合技术要求。
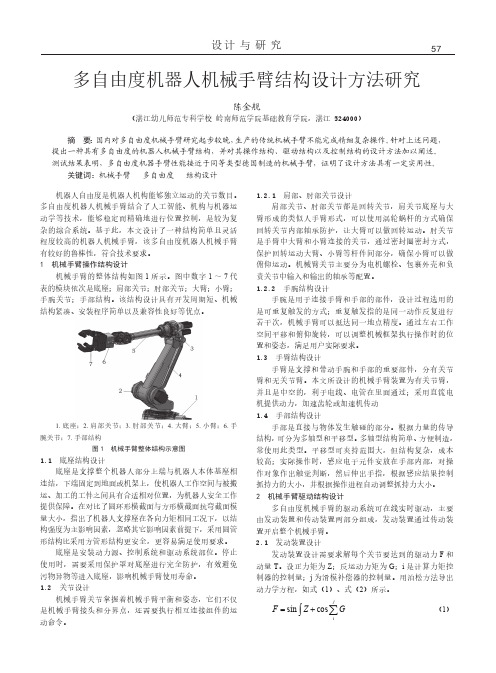
1 机械手臂操作结构设计机械手臂的整体结构如图1所示。
图中数字1~7代表的模块依次是底座;肩部关节;肘部关节;大臂;小臂;手腕关节;手部结构。
该结构设计具有开发周期短、机械结构紧凑、安装程序简单以及兼容性良好等优点。
1.底座;2.肩部关节;3.肘部关节;4.大臂;5.小臂;6.手腕关节;7.手部结构图1 机械手臂整体结构示意图1.1 底座结构设计底座是支撑整个机器人部分上端与机器人本体基座相连结,下端固定到地面或机架上,使机器人工作空间与被搬运、加工的工件之间具有合适相对位置,为机器人安全工作提供保障。
在对比了圆环形横截面与方形横截面抗弯截面模量大小,指出了机器人支撑座在各向力矩相同工况下,以结构强度为主影响因素,忽略其它影响因素前提下,采用圆管1.2.1 肩部、肘部关节设计肩部关节、肘部关节都是回转关节,肩关节底座与大臂形成的类似人手臂形式,可以使用涡轮蜗杆的方式确保回转关节内部轴承防护,让大臂可以做回转运动。
肘关节是手臂中大臂和小臂连接的关节,通过密封圈密封方式,保护回转运动大臂、小臂等杆件间部分,确保小臂可以做俯仰运动。
机械臂关节主要分为电机螺栓、包裹外壳和负责关节中输入和输出的轴承等配置。
1.2.2 手腕结构设计手腕是用于连接手臂和手部的部件,设计过程选用的是可重复触发的方式;重复触发指的是同一动作反复进行若干次,机械手臂可以抵达同一地点精度。
通过左右工作空间平移和俯仰旋转,可以调整机械框架执行操作时的位置和姿态,满足用户实际要求。
1.3 手臂结构设计手臂是支撑和带动手腕和手部的重要部件,分有关节臂和无关节臂。
本文所设计的机械手臂装置为有关节臂,并且是中空的,利于电线、电管在里面通过;采用直流电机提供动力,加速齿轮或加速机传动1.4 手部结构设计手部是直接与物体发生触碰的部分。
新型机器人手臂的设计及其运动学分析
新型机器人手臂的设计及其运动学分析一. 引言随着人工智能和机器人技术的不断发展,机器人的应用范围也日益扩大。
现代机器人的应用领域涉及军事、医疗、生产制造、深海勘探等多个方面。
机器人手臂作为机器人的关键组成部分,其设计和运动学分析对机器人的工作能力和性能至关重要。
本篇文章将介绍新型机器人手臂的设计及其运动学分析。
二. 机器人手臂的设计机器人手臂设计的核心是机械结构的设计,机器人手臂机械结构的设计要兼顾机械结构的刚度和机器人手臂的灵活性。
机器人手臂的机械结构关键包括伺服电机、节能器、速度减速器和传动部件等。
在机械结构的设计中,应根据机器人应用领域的不同来要求机器人手臂的机械结构要具有不同的特性。
1. 伺服电机机器人手臂的伺服电机通常采用直流伺服电机或步进电机。
直流伺服电机具有精度高,钟相好等特点,步进电机由于具有分区角高、平行精度高、加速扭矩大等特点,在机器人控制方面有其优势。
2. 节能器机器人手臂的节能器的设计本质上是为了提高机器人手臂机械结构的稳定性,以便更好地满足机器人控制要求。
机器人手臂的节能器分为弹性节能器和非弹性节能器,而在实际应用中可以有多重节能器组合使用的情况。
3. 速度减速器机器人手臂的速度减速器的设计是为了满足机器人手臂在加速和减速时力传递平稳,同时不影响机器人手臂的定位精度等要求。
4. 传动部件机器人手臂的传动部件设计主要是指转动机构和直线运动机构的设计。
转动机构通常采用齿轮传动、链条传动等传动方式,直线运动机构通常采用直线导轨、滑动轮等传动方式。
三. 机器人手臂的运动学分析机器人手臂的运动学分析的目的是研究机器人手臂的运动状态和位置变化规律。
机器人手臂的运动学分析包括正运动学和反运动学两个方面。
1. 正运动学机器人手臂的正运动学分析是研究机器人各关节以及机械臂的末端定位之间的运动变化规律。
正运动学可以求出机器人手臂的位置和方向等信息。
正运动学的基本思路是根据机械结构和运动控制算法,计算出各个关节的运动量,进而确定机械臂的末端位置。
基于机械臂的毕业设计课题

基于机械臂的毕业设计课题
1. 基于机械臂的自动组装生产线设计:设计一个能够自动完成零件组装的生产线,利用机械臂进行零件的抓取、定位和组装,实现高效的生产任务。
2. 基于机械臂的物料搬运系统设计:设计一个能够自动搬运重物或大件物料的系统,利用机械臂进行物料的抓取、放置和搬运,提高物料搬运效率和安全性。
3. 基于机械臂的人工智能导盲系统设计:设计一个能够辅助视力障碍人士导航和避障的系统,利用机械臂进行障碍物检测和引导,提升视力障碍人士的生活质量和安全性。
4. 基于机械臂的植物智能养护系统设计:设计一个能够自动监测和养护植物的系统,利用机械臂进行植物的浇水、施肥和修剪,实现智能的植物养护管理。
5. 基于机械臂的无人机定位和抓取系统设计:设计一个能够自动定位和抓取无人机的系统,利用机械臂进行无人机的定位识别和抓取操作,实现高效的无人机捕捉任务。
注意:在选择毕业设计课题时,还需根据个人的背景、兴趣和专业要求进行考虑和选择。
仿生机器人手臂设计与控制技术研究
仿生机器人手臂设计与控制技术研究摘要:随着科技的进步,仿生机器人手臂在工业自动化、医疗辅助、残障人士辅助等领域展示出广阔的应用前景。
本文侧重于对仿生机器人手臂的设计与控制技术进行研究,主要包括机械结构设计、传感器技术、运动规划和控制算法等方面的内容。
通过对相关领域的研究文献和实践案例的分析,本文总结了目前仿生机器人手臂设计与控制技术的发展状况,并提出了未来的发展方向和挑战。
1. 引言仿生机器人手臂是模仿人类手臂的结构和功能特点设计的一种机器人手臂。
它具备高度的柔性、精确的运动控制和多模式操纵能力,广泛应用于制造业、医疗、军事等领域。
然而,仿生机器人手臂的设计与控制技术仍面临许多挑战,如机械结构设计、传感器技术、运动规划和控制算法等。
2. 机械结构设计机械结构是仿生机器人手臂的核心,直接影响其运动灵活性和负载能力。
目前,常用的机械结构包括直线结构、旋转结构和多自由度结构。
直线结构适用于简单的抓取任务,旋转结构适用于需要大范围旋转的任务,多自由度结构适用于复杂的操作任务。
3. 传感器技术传感器技术对于仿生机器人手臂的感知能力至关重要。
常用的传感器包括力传感器、位置传感器、视觉传感器等。
力传感器可以实时测量机器人手臂的力作用和力反馈,位置传感器可以实时测量机器人手臂的位置和姿态,视觉传感器可以实时获取环境信息和目标物体特征。
4. 运动规划运动规划是指在给定任务和环境条件下,确定机器人手臂的轨迹和姿态的过程。
常用的运动规划算法包括基于轨迹生成的方法和基于优化模型的方法。
基于轨迹生成的方法适用于简单的抓取和搬运任务,基于优化模型的方法适用于复杂的操作任务。
5. 控制算法控制算法用于实现机器人手臂的精确运动控制。
常用的控制算法包括PID控制、模糊控制和神经网络控制等。
PID控制算法通过调整比例、积分和微分这三个参数,实现机器人手臂路径跟踪和动态性能的优化。
模糊控制算法通过定义模糊规则和模糊推理,实现机器人手臂对复杂环境和动态目标的适应性控制。
垂直多关节机器人臂部和手部设计本科设计
垂直多关节机器人臂部和手部设计摘要:由于关节型机器人具有传动原理简单、结构凑紧、所占空间体积小、相对的工作空间大,还能绕过基座周围的一些障碍物等特点。
综合以上几点考虑,以及为了提高生产效率和降低劳动强度,满足特定的工作要求,课题设计的机器人为垂直多关节机器人,采用了直流伺服电机驱动,通过一系列的轴和齿轮传动顺利实现了腕部的旋转与摆动,手爪的自动抓取与放松工件运动。
为了使整个机构结构紧凑,合理布置了电动机、轴和齿轮,设计了齿轮和轴的结构,并进行了强度校核计算。
由于驱动电机的个数与手臂自由度的个数是紧密联系的,因此减少电机的数量不但能减小机械手臂的重量,而且还会简化整个系统的动力学与运动学的分析。
传动中采用了软轴、波纹管联轴器、传动轴和两对齿轮传动。
在选材方面,为了使机器人重量较轻,以及腕部能够灵活的运动,故选取轻型材料,我所设计的机器人的材料为铸造铝合金中的铝铜合金。
该机器人手臂具有刚性好、传动精度高、重量轻的特点。
设计中大多采用了标准件和常用件,降低了设计和制造的成本。
关键词:垂直多关节机器人;伺服电机;齿轮传动;手臂The Design of arm and hands for Vertical multi-joint robotAbstract:As the joint coordinates robot with a simple principle, the structure together tight, has the small space, compared to the work of a large space, can bypass obstacles around the base some characteristics. As the above considerations, and in order to improve production efficiency and reduce labor intensity, to meet specific work requirements, This designed robot is vertical multi-joint robot , using a DC servo motor, Through a series of shafts and gears realizated wrist rotation and swinging, and the movement of Auto-Hand crawls and relax. In order to make the entire structure is compact, rational layout the motor shaft and the gear , design the structure of the gear and shaft, and the strength verification. Due to the number of motor-driven and the number of degrees of freedom of arms are closely linked, thus reducing the number of motor not only reduce the weight of the arm, but also it will simplify the analysis of the whole system dynamics and kinematics. The transmission of the design has used the flexible shaft, bellows couplings, wrist and two pairs ofgear drive. In the choice of material, in order to make the robot weight lighter and the wrist can movements Agile. so selection of light materials, I have designed materials of robot is aluminum-copper alloy of cast aluminum alloy . This robot’s arm has superity of good rigidity, precise transmission and weight lighter. So the design mostly used the standard parts and common parts, reduced the cost of the design and the production.Key words: Vertical multi-joint robot;servo motor ;transmission of gears ;arm 毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
机械手设计 毕业设计题目

有关“机械手设计”的毕业设计机械手设计是自动化和机器人领域的一个重要主题。
有关“机械手设计”的毕业设计如下:1.确定设计目标:在开始设计之前,明确你的设计目标是非常重要的。
这可能包括机械手的功能、应用领域、预期的精度和成本预算等。
2.调研和分析:在开始设计之前,进行充分的调研和分析是必要的。
了解当前市场上已有的机械手设计,分析其优缺点,并确定你的设计如何与它们区分开来。
3.机械手结构选择:根据设计目标,选择合适的机械手结构。
这可能包括机械臂、手指或其他运动部件。
了解不同类型的机械手结构及其运动特性,选择最适合你设计的结构。
4.运动规划:确定机械手的运动轨迹和操作方式。
这可能涉及确定关节角度、运动范围和速度等参数。
使用运动学方程或计算机仿真软件来验证和优化运动规划。
5.控制系统设计:设计用于控制机械手运动的控制系统。
这可能包括电机驱动、传感器输入和控制器算法等。
选择合适的控制系统硬件和软件,并编写控制程序以实现所需的运动和操作。
6.材料选择:选择用于制造机械手的材料。
这可能包括金属、塑料或其他复合材料。
考虑材料的强度、刚度、耐磨性和成本等因素。
7.制造和装配:将设计转化为实际的机械手结构。
这可能涉及制造工艺、装配和调试等步骤。
确保制造过程中保持精度和质量标准。
8.测试和评估:对制造完成的机械手进行测试和评估。
这可能包括性能测试、精度测试和可靠性测试等。
根据测试结果对设计进行必要的调整和优化。
9.文档编写和报告:完成设计后,编写详细的文档和报告,包括设计说明、制造流程、测试结果等。
这将有助于展示你的设计和理解,并为你的毕业设计提供全面的记录。
三自由度机械臂毕业设计
三自由度机械臂毕业设计毕业设计题目:三自由度机械臂设计与控制一、设计背景三自由度机械臂是工业机器人中常见的一种结构,通常由三个关节驱动器构成,可以实现在三个方向上的运动。
该设计旨在研究三自由度机械臂的结构设计和控制算法,提高其运动精度和稳定性,以满足工业生产中对机器人精准操作的需求。
二、设计内容1.机械结构设计:根据机械臂的工作范围和负载要求,设计合适的机械结构,包括三个关节的连杆长度、角度范围等,确保机械臂能够在工作空间内自由灵活地运动,并能承受所需的负载。
2.关节驱动器选择:选择合适的关节驱动器,比如伺服电机、步进电机等,确保驱动器能够提供足够的转矩和精确的控制,以实现机械臂的精准运动。
3.控制系统设计:设计相应的控制系统,包括运动规划、轨迹跟踪、碰撞检测等算法,实现机械臂在各种工作场景下的自动化操作。
同时,考虑到三自由度机械臂的运动学模型,设计合理的控制策略,提高机械臂的运动精度和稳定性。
4.系统集成和调试:将机械结构、关节驱动器和控制系统进行集成,通过实验验证机械臂的性能和稳定性,调试控制算法,不断优化设计方案,使机械臂达到预期的工作效果。
三、设计目标1.实现三自由度机械臂在三维空间内的高精度运动,能够完成各种复杂的工作任务。
2.提高机械臂的运动速度和稳定性,减少运动过程中的振动和误差,提高工作效率。
3.实现机械臂与外部环境的智能交互,通过传感器实时监测工作环境,避免碰撞和危险情况的发生。
4.设计简洁高效的控制系统,具有良好的实时性和可靠性,便于操作和维护。
四、预期成果通过以上设计内容和目标,预期能够完成一台具有高精度运动和稳定性的三自由度机械臂原型机,并实现其在工业生产中的应用。
同时,可以得到相关的技术研究成果,为工业机器人领域的发展贡献一份力量。
五、结语三自由度机械臂的设计与控制是一个具有挑战性和重要性的课题,需要多方面的知识和技能综合运用。
希望通过本次毕业设计,能够全面学习和掌握机械臂设计与控制的相关知识,提升自己在工程领域的实践能力和创新能力,为未来的科研和工作打下坚实的基础。
工业机器人专业毕业设计题目大全

工业机器人专业毕业设计题目大全1. 工业机器人路径规划优化设计问题描述工业机器人在执行任务时需要根据任务要求规划最优路径,以提高生产效率。
本设计要求针对特定生产场景,设计一种路径规划优化算法,使工业机器人在执行任务时能够选择最短路径,避免碰撞,并尽可能减少运动时间。
设计要求•分析特定生产场景的要求和条件;•研究和实现路径规划优化算法;•设计算法测试和性能评估方法。
2. 工业机器人自动抓取系统设计问题描述工业机器人在生产过程中需要能够自动抓取不同形状、尺寸和重量的物品,并能够适应不同生产线上的工作环境。
本设计要求设计一种工业机器人自动抓取系统,使机器人能够根据物品的特征自动调整抓取策略,并能够保证抓取的准确性和稳定性。
设计要求•分析不同物品的特征,包括形状、尺寸和重量等;•设计一种智能的抓取系统,能够根据物品的特征自动调整抓取策略;•设计算法测试和性能评估方法。
3. 工业机器人视觉导航系统设计问题描述工业机器人在执行任务时需要具备视觉导航能力,以实现自主导航和避障功能。
本设计要求设计一种工业机器人视觉导航系统,使机器人能够通过摄像头获取环境图像,并能够识别和跟踪目标物体,同时能够实时更新环境地图和规划最优路径。
设计要求•设计一种视觉导航算法,能够实时获取环境图像,并识别和跟踪目标物体;•结合环境地图,设计最优路径规划算法;•设计算法测试和性能评估方法。
4. 工业机器人协作控制系统设计问题描述工业机器人在生产过程中有时需要与其他机器人或工人进行协作工作,以提高生产效率。
本设计要求设计一种工业机器人协作控制系统,实现多机器人或机器人与工人之间的协作工作,同时保证工作的安全性和协调性。
设计要求•分析工业机器人协作工作的需求和条件;•设计一种协作控制系统,实现多机器人或机器人与工人之间的协作工作;•设计算法测试和性能评估方法。
5. 工业机器人故障诊断系统设计问题描述工业机器人在长时间运行过程中可能会出现故障,影响生产效率和机器人的安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人机械手机构设计
1、搬运机器人手臂机构设计
毕业论文任务书
工作原理及工艺过程:
机械人手臂机构是模仿人的手臂设计的,这种机器人有肩、肘、腕三个关节自由度,有大臂、小臂两根连杆以及一个机械手组成。
臂杆部分是开式连杆系,臂杆主要用于对物体的抓取、搬运、放置工作。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
2、堆垛机器人机械手臂机构设计
工作原理及工艺过程:
机械人手臂机构是模仿人的手臂设计的,这种机器人有肩、肘、腕三个关节自由度,有大臂、小臂两根连杆以及一个机械手组成。
臂杆部分是开式连杆系,臂杆主要用于对物体的抓取、搬运、放置工作。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
3、喷涂机器人手臂机构设计
工作原理及工艺过程:
喷涂机器人又叫喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人喷漆机器人主要由机器人本体、计算机和相应的控制系统组成。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
4、装配机器人手臂机构设计
工作原理及工艺过程:
机械手由机座、机械臂、手爪、PLC 可编程控制器及气源等部分组成。
可以完成水平臂的摆动和伸缩、垂直臂的伸缩、手爪的旋转和抓取物料等动作, 准确地把物料送到指定位置。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手工作仿真动画
5、焊接机器人手臂机构设计
工作原理及工艺过程:
机械手由机座、机械臂、手爪、PLC 可编程控制器及伺服电机等部分组成。
可以完成水平臂的摆动和伸缩、垂直臂的伸缩、手爪的旋转等动作, 准确地把焊枪送到指定位置。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
6、气动机器人手臂机构设计
工作原理及工艺过程:
气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手。
其主要特点是:介质李源极为方便,输出力小,气动动作迅速,结构简单,成本低。
但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
7、车载机器人机械手臂机构设计
毕业论文任务书
工作原理及工艺过程:
机械人手臂机构是模仿人的手臂设计的,这种机器人有肩、肘、腕三个关节自由度,有大臂、小臂两根连杆以及一个机械手组成。
臂杆部分是开式连杆系,臂杆主要用于对物体的抓取、搬运、放置工作。
任务:
(1)根据工艺动作顺序和协调要求给出拟定总体结构方案
(2)进行大臂机构、小臂机构以及机械手机构设计
(3)给出主要零件图以及总体装配图
(4)编写设计说明书
(5) 机械手三维建模工作仿真动画
8、运送机械手设计。