简易超声波测距仪的制作
10米超声波测距
超声波测距仪的制作(常规器件)这里介绍一款国外的不使用单片机的超声波测距仪。
本超声波测距仪通过测量超声波发射到反射回来的时间差来测量与被测物体的距离。
可以测量0.35-10m的距离。
实物图如下:原理图如下:一、电路原理1 超声波发射电路由两块555集成电路组成。
IC1(555)组成超声波脉冲信号发生器,工作周期计算公式如下,实际电路中由于元器件等误差,会有一些差别。
条件: RA =9.1MΩ、 RB=150KΩ、 C=0.01μFTL = 0.69 x RB x C= 0.69 x 150 x 103 x 0.01 x 10-6 = 1 msecTH = 0.69 x (RA + RB) x C= 0.69 x 9250 x 103 x 0.01 x 10-6 = 64 msecIC2组成超声波载波信号发生器。
由IC1输出的脉冲信号控制,输出1ms频率40kHz,占空比50%的脉冲,停止64ms。
计算公式如下:条件: RA =1.5KΩ、 RB=15KΩ、 C=1000pFTL = 0.69 x RB x C= 0.69 x 15 x 103 x 1000 x 10-12 = 10μsecTH = 0.69 x (RA + RB) x C= 0.69 x 16.5 x 103 x 1000 x 10-12 = 11μsecf = 1/(TL + TH)= 1/((10.35 + 11.39) x 10-6) = 46.0 KHzIC3(CD4069)组成超声波发射头驱动电路。
2 超声波接收电路超声波接收头和IC4组成超声波信号的检测和放大。
反射回来的超声波信号经IC4的2级放大1000倍(60dB),第1级放大100倍(40dB),第2级放大10倍(20dB)。
由于一般的运算放大器需要正、负对称电源,而该装置电源用的是单电源(9V)供电,为保证其可靠工作,这里用R10和R11进行分压,这时在IC4的同相端有4.5V的中点电压,这样可以保证放大的交流信号的质量,不至于产生信号失真。
Arduino超声波测距枪的制作米思齐课件

开始搭建
开始搭建
开始搭建
开始搭建
开始搭建
连接主控板
注意接线
数码管
超声波
SDA-通信数据线接A4 ,SCL通信时钟线接A5,V-电源,G-地; 只能接模拟口(本身数码管使用专 门的数码管驱动电路TM1650,无 需单片机去动态扫描数码管,通过 IIC方式只需往特定地址写数据即 可)
trig(控制端)和 echo(接收端)必须接主控板的S口 黄线连接echo(接收端) 白线连接trig(控制端) 即黄线接D4的S口(蓝色针眼) 白线接D3的S口(蓝色针眼)
三、超声波测距枪由 那部分组成
超声波测距枪的组成
四、搭建超声波测距 枪
准备材料
主控板 1块 六角扳手 1个
双孔梁-8孔 1个 双孔梁-6孔 1个
传感器支架 1个 双孔梁-4孔 1个
数据线
1根 按键模块 1个
3pin线
1根 4pin线
2根
超声波传感器 1个 风扇模块 1个
螺丝、螺母 若干
开始搭建
用数据线将主控板和电脑连接起来
五、如何让测距枪测 量
设计超声波测距枪的流程图
检测按键模块的数值是否是0和1
复习之前的知识,检测按键模块返回的数值0和1
检测超声波传感器测量的距离数值
让数码管显示超声波传感器的值
定义一个整形变量“i”,给变量 i 赋值为超声波传感器测量的距离,使 用四位数码管显示变量 i 的数值3秒
编写程序
按照流程图编写程序
六、拓展
同学们,你们是否能制作一个带声光的测距枪呢? 1、拿出LED灯和蜂鸣器,当按下按键时,不仅数码管显示数值,还能发出声音和光。
下节课再见!
知识点——数码管
简易超声波测距仪的设计

摘要超声波具有指向性强,能量消耗缓慢,传播距离较远等优点,所以,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,它广泛应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。
本课题详细介绍了超声波传感器的原理和特性,以及Atmel公司的AT89C51单片机的性能和特点,并在分析了超声波测距的原理的基础上,指出了设计测距系统的思路和所需考虑的问题,给出了以AT89C51单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
整个电路采用模块化设计,由主程序、预置子程序、发射子程序、接收子程序、显示子程序等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
相关部分附有硬件电路图、程序流程图。
经实验证明,这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以有效地解决汽车倒车、建筑施工工地以及一些工业现场的位置监控。
关键词AT89C51;超声波;测距AbstractUltrasonic wave has strong pointing to nature ,slowly energy consumption ,propagating distance farther ,so, in utilizing the scheme of distance finding that sensor technology and automatic control technology combine together ,ultrasonic wave finds range to use the most general one at present ,it applies to guard against theft , move backward the radar , water level measuring,building construction site and some industrial scenes extensively.This subject has introduced principle and characteristic of the ultrasonic sensor in detail ,and the performance and characteristic of one-chip computer AT89C51 of Atmel Company ,and on the basis of analyzing principle that ultrasonic wave finds range ,the systematic thinking and questions needed to consider that have pointed out that designs and finds range ,provide low cost , the hardware circuit of high accuracy , ultrasonic range finder of miniature digital display and software design method taking AT89C51 as the core. Modular design of the whole circuit from the main program, pre subroutine fired subroutine receive subroutine. display subroutine modules form. SCM comprehensive analysis of the probe signal processing, and the ultrasonic range finder function. On the basis of the overall system design, hardware and software by the end of each module.The research has led to the discovery that the software and hardware designing is justified, the anti-disturbance competence is powerful and the real-time capability is satisfactory and by extension and upgrade, this system can resolve the problem of the car availably, building construction the position of the workplace and some industries spot supervision.Key words AT89C51; Ultrasonic Wave; Measure Distance目录1 绪论 (1)1.1 超声波测距仪的设计思路 (1)1.2 方案一:利用分立模块的超声波测距仪 (1)1.3 方案二:基于AT89C51单片机的超声波测距仪 (2)2 理论分析与计算 (4)2.1 测量与控制方法 (4)2.2 理论计算 (4)3 系统的硬件结构设计 (6)3.1 51系列单片机的功能特点及测距原理 (6)3.1.1 51系列单片机的功能特点 (6)3.1.2 单片机实现测距原理 (7)3.2 超声波发射电路 (7)3.3 超声波检测接收电路 (8)3.4 超声波测距系统的硬件电路设计 (9)4 系统软件的设计 (11)4.1 超声波测距仪的算法设计 (11)4.2 主程序流程图 (12)4.3 超声波发生子程序和超声波接收中断程序 (13)4.4 系统的软硬件的调试 (14)4.4.1 超声波测距误差分析 (15)4.4.2 提高精度的方案及系统设计 (16)总结 (17)致谢 (18)附录 (19)参考文献 (26)简易超声波测距仪的设计1绪论1.1 超声波测距仪的设计思路超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
超声波测距设计方案

超声波测距设计方案1. 概述超声波测距是一种利用超声波传感器对目标物体进行距离测量的技术。
它具有非接触、精度高、速度快等优点,广泛应用于工业自动化等领域。
本设计方案旨在实现一个基于Arduino的超声波测距系统,可以测量距离在2cm~400cm之间的目标物体,并将结果显示在液晶屏上,以方便用户观察和使用。
2. 系统组成本系统由硬件和软件两部分组成,硬件系统包括超声波传感器、Arduino主控板、液晶屏、电源等部分;软件系统包括Arduino的程序。
2.1 超声波传感器超声波传感器是本系统中最关键的部分,它通过发射超声波信号并接收回波信号,测量目标物体与传感器的距离。
常用的超声波传感器有HC-SR04、JSN-SR04T等型号,本设计方案使用HC-SR04超声波传感器。
2.2 Arduino主控板Arduino是一种开源的嵌入式系统,具有方便、易用、可扩展等特点,可以实现各种各样的控制任务。
本设计方案使用Arduino UNO主控板,它是一种基于ATmega328P芯片的开发板,具有丰富的接口和较高的性能和稳定性。
2.3 液晶屏液晶屏是显示距离测量结果的部分,本设计方案采用16*2字符型液晶屏,能够显示2行16个字符,显示结果清晰、直观。
2.4 电源本系统采用外接直流电源供电,电压为5V,可以通过USB接口或外部电源插头供电。
3. 系统原理本系统的测距原理基于超声波传感器发射超声波信号并接收回波信号的原理。
当超声波传感器发射超声波信号后,信号会以声速传播在空气中,当遇到目标物体后,部分波信号会被目标物体反射回来,形成回波信号,超声波传感器接收到回波信号后,再通过计算超声波信号的来回时间、声速等参数,便可以计算出目标物体与传感器的距离。
4. 系统设计超声波传感器通过接口连接到Arduino主控板,并需要外接电源,具体接线图如下所示:超声波传感器 VCC -> Arduino 5V液晶屏 RW -> Arduino GND整个系统的软件设计主要包括两部分,一部分是超声波测距的程序,另一部分是液晶屏显示的程序。
超声波测距仪的设计方案

软件算法优化
实验结果有效
采用时间戳和温度补偿的方法,提高了超 声波测距的精度和稳定性。
经过实验验证,该超声波测距仪的测量误 差在3mm以内,满足设计要求。
研究不足与展望
实验环境限制 硬件性能提升 软件算法优化 应用领域扩展
本次实验主要在室内环境下进行,对于室外复杂环境下的测量 精度和稳定性还需要进一步验证。
[2] 王晓华, 钱燕. 基于单片机的超声波测距 仪设计[J]. 仪表技术与传感器, 2020,(04): 56-60.
[3] 张志超, 王琳. 嵌入式超声波测距 仪的设计与实现[J]. 仪表技术与传感 器, 2021,(01): 78-82.
THANKS 感谢观看
可以考虑采用更高性能的单片机和传感器,以提高超声波测距 的精度和响应速度。
可以进一步优化软件算法,例如加入目标识别和跟踪功能,提 高超声波测距的应用范围。
超声波测距技术在机器人避障、自动驾驶、安防等领域都有广 泛的应用前景,可以进一步拓展应用领域。
07 参考文献
参考文献
[1] 张涛, 王超. 超声波测距仪的设计与 实现[J]. 电子测量技术, 2019, 42(11): 105-109.
计算距离
通过测量超声波从发射到 接收的时间,计算出距离 。时间乘以声速得到距离 。
数据处理及存储
数据处理
对采集到的数据进行处理,如滤波、去噪等,以提高测量精度。
数据存储
将处理后的数据存储到存储器中,方便后续分析和处理。
人机交互界面设计
显示测量结果
通过液晶显示屏或LED显示屏显 示测量结果。
按键输入
研究超声波测距仪的设计方案 有助于提高测量精度和可靠性 ,推动相关领域的发展。
简易手持式超声波测距仪
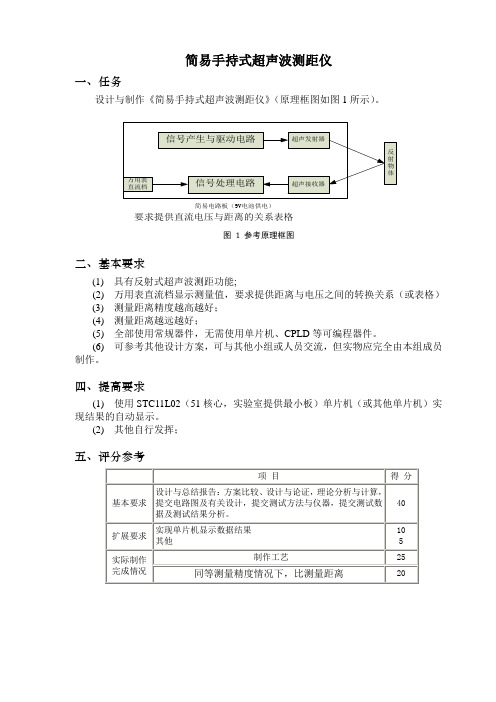
简易手持式超声波测距仪一、任务设计与制作《简易手持式超声波测距仪》(原理框图如图1所示)。
简易电路板(9V 电池供电)信号产生与驱动电路超声发射器反射物体信号处理电路超声接收器万用表直流档要求提供直流电压与距离的关系表格图 1 参考原理框图二、基本要求(1) 具有反射式超声波测距功能;(2) 万用表直流档显示测量值,要求提供距离与电压之间的转换关系(或表格) (3) 测量距离精度越高越好; (4) 测量距离越远越好;(5) 全部使用常规器件,无需使用单片机、CPLD 等可编程器件。
(6) 可参考其他设计方案,可与其他小组或人员交流,但实物应完全由本组成员制作。
四、提高要求(1) 使用STC11L02(51核心,实验室提供最小板)单片机(或其他单片机)实现结果的自动显示。
(2) 其他自行发挥;五、评分参考项 目得 分 基本要求 设计与总结报告:方案比较、设计与论证,理论分析与计算,提交电路图及有关设计,提交测试方法与仪器,提交测试数据及测试结果分析。
40 扩展要求 实现单片机显示数据结果 其他10 5 实际制作完成情况制作工艺25 同等测量精度情况下,比测量距离20简易电容、电阻测量仪一、任务设计与制作《简易电容、电阻测量仪》。
二、基本要求(1) 测量范围:电阻100Ω ~1MΩ ;电容100pF ~10000pF(2) 万用表直流档显示测量值,要求提供被测值与电压之间的转换关系(或表格)(3) 测量精度:±5%(4) 可手动切换量程。
(5) 全部使用常规器件,无需使用单片机、CPLD等可编程器件。
(6) 可参考其他设计方案,可与其他小组或人员交流,但实物应完全由本组成员制作。
四、发挥部分(1) 使用STC11L02(51核心,实验室提供最小板)单片机(或其他单片机)实现结果的自动显示。
(2) 量程自动切换。
(3) 其他发挥功能。
五、评分参考项目得分基本要求设计与总结报告:方案比较、设计与论证,理论分析与计算,提交电路图及有关设计,提交测试方法与仪器,提交测试数据及测试结果分析。
超声波测距仪的设计与制作
7.1 项目描述
• 由于超声测距是一种非接触检测技术, 不受光线、被测对象颜色等 影响, 较其他仪器更卫生, 更耐潮湿、粉尘、高温、腐蚀气体等恶 劣环境, 具有少维护、不污染、高可靠、长寿命等特点, 因此广泛 应用于纸业、矿业、电厂、化工业、水处理厂、农业用水、环保检测、 食品、水文、空间定位、公路限高等行业中。可在不同环境中进行距 离准确度在线标定, 可进行差值设定, 可直接用于水、酒、糖、饮 料等液位或料位高度。
上一页 返回
2.2常用电子仪器的介绍与使用
• 2. 2. 1示波器 • 示波器是一种用来观察各种周期性变化的电压和电流波形的电子仪
器.可用来测电压或电流的幅度、频率、相位、调制度及脉冲信号的 各种电参量。它是电工、电子实验中必不可少的常用电子测量仪器。
下一页 返回
2.2常用电子仪器的介绍与使用
• 1.示波器的种类 • 示波器的种类较多.主要有通用示波器和专用示波器两大类。按不
• (1)信号发生器:通常使用的信号发生器有高频和低频正弦波信号发 生器、脉冲发生器、函数发生器、噪声发生器等。
下一页 返回
2.1电子仪器的分类
• (2)电压表:在电子线路实验中一般使用电子电压表、数字电压表等。 元器件参数测量仪器包括电桥、Q表、晶体管特性参数图示仪、集成 电路测试仪等。
• (3)示波器:包括通用示波器、多踪示波器等。 • (4)频率、相位测量仪器:包括通用电子计数器、数字式频率计、数
上一页 下一页 返回
7.2 理论知识
• 测量距离实际是测量发射脉冲与回波脉冲之间的时间差, 因电磁波 以光速传播, 据此就能ห้องสมุดไป่ตู้算成与目标的精确距离。
• 雷达测距系统框图如图7-1 所示。 • 对于车载雷达, 一般选用60GHz、120GHz、180GH
超声测距仪的设计与制作
超声测距仪的设计与制作
超声测距仪(Ultrasonic Distance Meter)是一种通过超声波
来测定物体距离的仪器。
其基本原理是:以超音速在介质中传播的
特点,发送器产生超声波,通过传感器接收到物体反射回来的超声波,并通过处理器将接收到的信息转化为距离数据。
超声波测距的
优点是适用于大多数物体,测量精度高,反应时间快,常用于工业
领域、机器人控制、防盗报警等应用。
下面是超声测距仪的设计与制作步骤:
1. 制定设计方案:首先确定设计的目标、功能和应用范围。
确
定测量范围、分辨率、测量精度和可靠性要求,选择适当的传感器、发声器和处理器等元件和模块。
2. 确定电路原理图和PCB板图:采用EDA软件设计电路原理图
和PCB板图,按照元器件的连接方式设计电路,选择合适的PCB板,进行布线、连接、焊接等工作。
3. 组装调试:按照PCB板图进行组装,连接电源及显示器,并
进行初步测试,包括实际测量距离与显示距离的比对,测量精度的
测试,以及各种异常处理。
4. 调整优化:主要是对电路和程序进行优化以保证测距精度和
响应速度,同时还要考虑功耗、噪音、温度和湿度等因素的影响。
5. 装箱上线:将电路和PCB板固定在合适的外壳中,加上电池、电源适配器、传感器和发声器等部件,修整外观和按钮等位置,进
行最后的功能测试和运行稳定性测试。
以上是超声测距仪的设计和制作步骤,需要选用适合的元器件和材料,按照标准的工艺流程,进行精密的组装和调试,保证生产出稳定、可靠、精准的超声测距仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 3 超声波发射电路原理图
图 4 超声波换能器结构图
132
福建电脑
2006 年第 7 期
3.3 超声波检测接收电路 本超声波测距仪的接收电路采用集成块 CX20106A,其总放
大增益为 80db 以保证 7 脚输出的控制脉冲序列信号幅度在 3. 5- 5V 以内。超声接收换能器 UCM- 40R 接收到的信号经 C6 电 容耦合至输入端 1 脚,总增益大小由 2 脚接收器 R.C.决定。R 越 小,C 越大增益越高,C6 选值过大将造成频率响应变差,为了兼顾 总增益和频率特性 R19 取 10Ω ,C4 取 1μF,3 脚 C 为检波电容, 选 3.3μF,当其容量减小时,瞬态响应,灵敏度会有所提高,但检波 输出脉冲宽度变动也较大。带通滤波特性,由 5 脚 R17 电阻决定 其值在 210K- 220K 间调整。用金属膜电阻调试,若其阻值偏差过 大,中心频率也将相对偏移。所以当信号经过带通滤波器时,增益 将大大降低,6 脚 C4 电容为比较积分电容 7 脚 R18 为输出负载 电阻,47μF 电容 C5 及 47 电阻 R5 为电源滤波元件,当电容容量 减小或失效时,将造成滤波不良可能干扰接收输入端。
避障系统的超声波测距通常运用超声波的反射原理,采用
渡越时间法(TOF,time of flight),通过测量超声波发射到返回之
间的时间间隔来计算距离,其示意图如图 2- 3 所示。由于时间长
度与声音通过的距离成正比关系,当发射超声波传感器发出一
个短暂的脉冲波时,记时开始;当接收超声波传感器接收到第一
个回波脉冲后,计时立即停止。此时,记录得到的时间值为 t,那
么从超声波发射位置到障碍物之间的实际距离就可按式(2.2)求 得。
L= ct / 2
(I)
式(I)中:L 为超声波发射位置到障碍物之间的实际距离;
t 为超声波发生器发出超声波到接收到超声波的时
间间隔;
c 为在空气中传播的速度。
由于超声波在空气中传播速度 c 与环境温度有关,其关系
压电式超声波换能器是利用压电晶体的谐振来工作的。超 声波换能器内部结构如图 4 所示,它有两个压电晶片和一个共 振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振 荡频率时,压电晶片将会发生共振,并带动共振板振动产生超声 波,这时它就是一个超声波发生器;反之,如果两电极间未外加 电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机 械能转化为电信号,这时它就成为超声波接收换能器了。超声波 发射换能器与接收换能器其结构上稍有不同,使用时应分清器 件上的标志(一般器件上有标明是 T 还是 R)。
接收返回的超声波信号。由于采用的是 12MHz 的晶振,计数器 每计一个数就是 1us,当主程序检测到接收成功的标志位后,将 计数器 T0 中的数(即超声波来回所用的时间)按式 I 计算,即可 得被测物体与测距器之间的距离。测出距离后结果将以十进制 BCD 码方式送往 LED 显示约 0.5s,然后再发超声波脉冲重复测 量过程。
3.1 单片机系统及显示电路 单片机用 P1.0 端口输出超声波换能器所需的 40kHz 方波
信号,利用外中断 0 口监测超声波接收电路输出的返回信号。显 示 电 路 采 用 简 单 实 用 的 4 位 共 阳 极 LED 数 码 管 , 段 码 用 74LS244 驱动,位码用 PNP 三极管 8550(可用 9012 替代)驱动。 单片机系统及显示电路如图 2 所示。
=484 4. 三种算法的比较
由上述三种方法所构造的哈夫曼树可以看出,三叉哈夫曼
树的深度以及带权路经长度明显优于二叉哈夫曼树,而本文算
法所构造的三叉哈夫曼树的深度与原有方法相同,但带权路经
长度要小,这样本文算法的查找效率是最高的,并且可以证明本
文方法符合贪心选择的性质[2],生成的三叉哈夫曼树是最优的。
【关键词】:超声波传感器;测距;CX20106A;数码管显示;单片机
1. 引言
设计一个超声波测距仪,可应用于汽车倒车、建筑施工工地
以及一些工业现场的位置监控,也可用于如液位、井深、管道长
度的测量、移动机器人、安全线提示,银行及取款机的一米线提
示等场合。要求测量范围在 0.10 ̄4.00m,测量精度 1cm,测量时
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
(上接第 91 页)
树如图 2 所示,根结点只有两棵子树,进行结点调整,首先将第 三层的结点 62 上移,得到的三叉树如图 4 所示,依次将结点 15 和 5 上移最后得到的三叉哈夫曼树如图 5 所示:
WPL=(2+4)×4+(8+9+10+5+12)×3+(25+30+15+32+18+20+ 24)×2
参考文献: 1. 苏长赞、邹殿贵著,《红外线和超声波遥控》,电子工业出版社。 2. 丁镇生编著,传感及其遥控遥测技术应用》,电子工业出版社。 3. 沈红卫编著,《单片机应用系统设计实例与分析》,北京航空航天大学 出版社。 4. 薛文达、谢文和、张呈祥编著,《传感器应用技术》,东南大学出版社。 5. 赖麒文编著,《8051 单片机 C 语言开发环境实务与设计》,科学出版 社。 6. 李光飞、楼然苗、胡佳文、谢象佐编著,《单片机课程设计实例指导》, 北京航空航天大学出版社。 7. 邢增平编著,《Protel 99 SE 设计专家指导》,中国铁道出版社。 8. 沈红卫编著,《基于单片机的智能系统设计与实现》,电子工业出版 社。
图 2 单片机及显示电路 3.2 超声波发射电路
超声波发射电路原理图如图 3 所示。发射电路主要由反向 器 74LS04 和超声波换能器 T 构成,单片机 P1.0 端口输出的 40kHz 方波信号一路经一级反向器后送到超声波换能器的一个 电极,另一路经两级反向器后送到超声波换能器的另一个电极。 用这种推挽形式将方波信号加到超声波换能器两端,可以提高 超声波的发射强度。输出端采用两个反向器并联,用以提高驱动 能力。上拉电阻 R10、R11 一方面可以提高反向器 74LS04(输出 高电平的驱动能力,另一方面可以增加超声波换能器的阻尼效 果,缩短其自由振荡的时间。我们在实验制作和电路改进中,为 了增加测量测量,可以考虑提高接收的灵敏度,但是灵敏度也并 不是越高就越好。接收灵敏度过高,容易引起自激,结果反而不 好,但是其实我们可以从增加发射功率方面着手,我们只要在发 射头两端加个线圈。线圈可以自己用 0.01mm 的铜丝在小磁环 绕成大致初级 10 匝,次级 40 匝左右。
见表 2.1,因此在要求精度较高的场合中,要进行温度补偿,补偿
方法有二种,其中一种用近似表示为式(II)所示:
c = 331 . 5 + 0 . 607t (m/ s )
(II)
表 2.1 波速与温度关系 另一种补偿方法就是用查表法,查上面温度与声速的对应 表,再适当插值补偿。这种方法精确度较高。在这里考虑到设计 上的简易性,没有进行补偿, 能达到简单应用的基本要求。 3 电路结构 根据超声波测距基本原理,可 以设计出超声波测距系统的 组成框图如图 3- 1 所示。
4.2 接收超声波程序 超声波发生子程序的作用是通过 P1.0 端口发送 2 个左右
的超声波脉冲信号(频率约 40kHz 的方波),脉冲宽度为 12us 左 右,同时把计数器 T0 打开进行计时。超声波发生子程序较简单, 但要求程序运行时间准确,所以采用汇编语言编程。超声波测距
器主程序利用外中断 0 检测返回超声波信号,一旦接收到返回 超声波信号(即 INT0 引脚出现低电平),立即进入中断程序。进 入该中断后就立即关闭计时器 T0 停止计时,并将测距成功标志 字赋值 1。 如果当计时器溢出时还未检测到超声波返回信号, 则定时器 T0 溢出中断将外中断 0 关闭,并将测距成功标志字赋 值 2 以表示本次测距不成功。 5. 结语
2006 年第 7 期
福建电脑
131
简易超声波测距仪的制作
李永鉴, 刘国安
(五邑大学信息学院 广东江门 529020)
【摘 要】:本系统利用 AT89S51 产生 40kHz 的频率驱动超声波换能器的发射头,接收头收到信号后,经 CX20106A 芯片 进行放大、限幅、滤波、整形、比较后输出低电平送到单片机的外部中断 0 申请中断,单片机响应中断请求,取得定时器内的时 间进行距离计算,用四位一体的数码管显示测出的距离,并可根据设定报警距离进行报警。制成的超声波测距仪性能良好, 结构简单,达到了方便、快捷、准确地测量距离的目的,有较好的推广价值。
重要的参考价值。
图 5 本文方法生成的三叉哈夫曼树 带权路径长度:
参考文献: 1. 严蔚敏,吴伟民.数据结构.北京:清华大学出版社,1997 年 4 月. 2. 王晓东.计算机算法设计与分析.北京:电子工业出版社,2005 年 6 月. 3. 黄锦祝.用 C 语言实现三叉哈夫曼树.福建电脑,2004(3):64 ̄65.
由此我们选择 0,1,2 作为三叉树左中右子树的编码,从而构造 三叉哈夫曼编码,构造的三叉哈夫曼编码长度是最短的。
图 3 初始哈夫曼树
图 4 第一步调整后有着广泛的应用,
本文算法能构造出较小长度的哈夫曼编码,因此在实际应用中
有着现实的意义,将对计算机网络、通信、图像压缩等领域有着
根据文中电路的参数和程序,测距器可测量范围为 0.07 ̄5. 50m, 实验中对测量范围 0.07 ̄2.50m 内的平面物体做了多次测 试,测距器的最大误差不超过 1cm, 重复一致性很好。目前此设 计可提交于应用于一些动机器人、安全线提示,银行及取款机的 一米线提示等场合。
图 5 超声波检测接收电路图 4. 系统的程序设计(如右图) 4.1 发送超声波子程序
与被测物体无直接接触,能够清晰稳定地显示测量结果。
2. 测量原理
超声波为直线传播方式,频率高,反射能力强;在空气中传
播速度为 340m/s,容易控制;受环境影响小,因此采用超生波传