光纤惯组的第二级温控系统算法设计与仿真
基于nRF24L01的无线智能温度监测系统
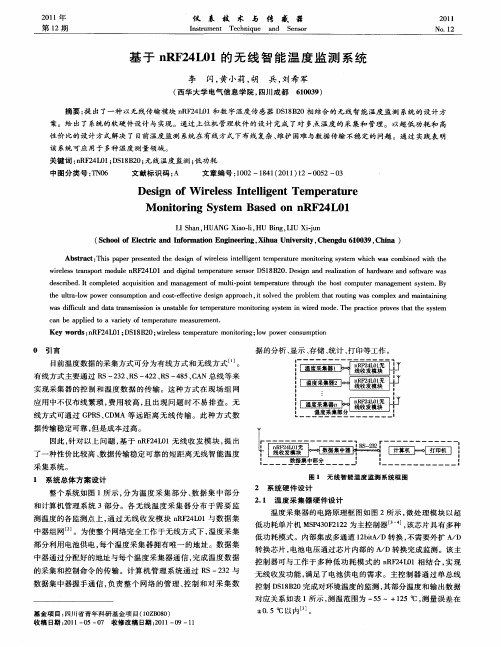
表 1 D 1 B 0部 分 温 度 采 集 值 和 输 出数 据 转 换 表 S8 2
微处 理模 块将监 测 到 的温度 和电压 以及 监测 时间 等数据 打包处理 , 通过 n F 4 0 R 2 L 1无线收发模块发送 至数据集 中器 ; 键
盘可查 询各记录值和设置各种 工作参数 , 如设 定和修改 温度 和 电压 的报警界限 , 当监测值超 出设 定界限 时 , 鸣器发声 , 蜂 当然 各种 设置也可通过计算机 管理 系统 的控 制命令来 完成 ; 时钟 电
n F4 0 R 2 L 1配置为接收模式 , 系统进 入低功 耗模式 , 待数据集 等
中器发 送命令 。若存 在命 令则 判 断命 令 类型 然后 进入 相应 的
图 5 温 度 采 集 器接 收 中 断流 程 图
数据接收 中断程序 主要 完成对 来 自数据 集 中器 的数 据 的
5 4
4. - 5℃ 以 内 。 0
第 1 2期
李闪等 : 于 n F 4 0 基 R 2 L 1的无线智能温度监测系统
5 3
功能模 块 , 防止 采集数 据 时出错 , 各采集 数据模 块 中需要 为 在 关 闭中断待采集结束后才能打开 。
图 2 温 度 采 集 器 电路 原 理 框 图
采集系统 。 1 系 统 总 体 方 案 设 计
图 1 无 线 智 能 温 度 监 测 系 统 框 图
整个 系统 如图 1所示 , 为 温度 采集 部分 、 据集 中部 分 分 数 和计算机管理 系统 3部分 。各无线 温度 采集 器分 布 于需要 监 测温度 的各监测点 上 , 过无线 收发 模块 n F 4 D 通 R 2 L 1与数据 集 中器组 网 J 。为使 整个 网络完全工作于无 线方式下 , 度采集 温 部分利用 电池供 电 , 每个温度 采集器拥 有唯一 的地址 。数 据集 中器通过分配好 的地址与每个温度 采集器通 信 , 成温度 数据 完
基于G-M制冷机的低温温度计全自动标定系统

基于G-M制冷机的低温温度计全自动标定系统李畏;黄永华;杨朴凡【摘要】基于两级G-M制冷机搭建了低温温度计全自动标定系统.通过PID温控仪和LabVIEW编程,实现了程序化自动控温、数据处理和报表输出一体化标定流程.提出了结合基于热阻尼的稳态控温标定和自然升温动态标定相结合的方法,不仅实现了4.2-290 K宽广温区内±0.05 K以内的标定精度水平,而且有效降低了等温载体控温点的标定时长,使标定效率比现有技术提高了2-4倍.%An automatic calibration system for low temperature thermometers was built based on a two stage G-M cryocooler.The integrated calibration process of automatic temperature control,data processing and report export is realized through a PID temperature controller and LabVIEW programming.The combination of steady-state calibration and dynamic calibration method was proposed,by which not only the ± 0.05 K calibration accuracy during large temperature range of 4.2-290 K was achieved,but also the calibration cycle of each temperature control point of isothermal block was significantly shortened,thus the calibration efficiency is 2-4times higher than the existing system.【期刊名称】《低温工程》【年(卷),期】2018(000)002【总页数】6页(P11-16)【关键词】低温温度计标定;全自动标定;G-M制冷机;标定精度【作者】李畏;黄永华;杨朴凡【作者单位】上海交通大学制冷与低温工程研究所上海 200240;上海交通大学制冷与低温工程研究所上海 200240;上海市低温技术与测试应用服务平台上海200240;上海交通大学制冷与低温工程研究所上海 200240【正文语种】中文【中图分类】TB6631 引言在大型低温工程系统或者深低温实验研究项目中,温度测量始终是最基本和最重要的参数之一。
机载光纤陀螺高精度多路测温系统设计与实现

B O R N E F O G ( i f b e r o p t i c g y r o ) , t h e p a p e r d e s i g n s a n d r e a l i z e s t h e h i g h — p r e c i s i o n , l o w- D e l a y t e mp e r a —
Ab s t r a c t : T h e p a p e r i n t r o d u c e s t h e d e s i g n o f a Mu h i c h a n n e l t e mp e r a t u r e me a s u r e me n t s y s t e m f o r AI R—
t u r e me a s u r e me n t s y s t e m w h i c h i s d i r v e n b y t wo — wi r e c o n s t a n t — v o h a g e s o u r c e b a s e o n t h e F P G A, i t a n a - l y z e s t h e d e s i g n a n d i mp l e me n t a t i o n o f t h e c o n s t a n t — v o l t a g e s o u r c e c i r c u i t , s i g n a l a mp l i i f e r c i r c u i t , AD c i r c u i t , a n a l o g mu h i p l e x e m c i r c u i t a n d f o l l o we r c i r c u i t . T h r o u g h t e s t a n d v e i r i f c a t i o n i t i s s h o w n t h a t t h e
光纤惯组的第二级温控系统算法设计与仿真

1 引 言
而遗传 算法 是一 种寻求 全局 最优 并且 不需 任何初 始
光纤惯组 的第二级温控系统算法设计与仿真
陈 勇 , 李 蕊 , 祝天 瑞
( 庆邮电大学 网络化控制与智能仪器仪表教育部重点实验室 , 重 重庆 40 6 ) 0 0 5
摘
要: 由于光 纤惯性 测量 组合对 温度 的敏感 性 , 故需 以
保 证 温度敏 感器件 的精 度和 稳定 性。 为 了获 得更好 的控 制效 果 , 文采 用 两级温 控方 案 , 点 本 重
A src:i eteF G ( br pi grsoe n MU (nra mesrm n ui r esi m ea r , bta tSn O c h i o c f e— t yocp )adI i t l aue et nt esniv t t prt e e i )a te o e a
第4 0卷 第 6期
21 0 0年 6月
激 光 与 红 外
L ER & I R AS NF ARE D
Vo. 0。 o 6 14 N .
Jn 2 1 u e,0 0
文章编号: 0- 7 (000 - 4 - 1 1 08 21)6 68 5 0 5 0 0
・ 电技 术 与系统 ・ 光
CHEN n LIRu , Yo g, i ZHU a —u Ti n r i
( e aoao f e okC n o & Itlgn Is u etMi s f d ctn C ogigU ie i f K yL brt yo t r ot l ne i t nt m n , n t o ua o , hnqn nvrt o r N w r le r ir E y i sy Ps n eeo muiao sC o gi 0 0 5 C ia ot adT l m nct n , hnqn 4 06 ,hn ) s c i g
一种高精度自适应温控算法的设计与实现

BFO算法在集中供热二次网温度控制系统中的应用

• 167•集中供热系统在改善居民居住环境,节约能源方面具有重要的意义,且集中供热系统的二次网供水温度直接影响整个系统的供热品质,因此本文将针对二次网供水温度控制系统进行研究。
鉴于常规PID 在控制对象具有非线性,时滞性等情况下往往不能达到很好的控制效果,设计采用一种随机搜索智能BFO 算法应用到二次网供水温度控制系统中,实现对二次网供水温度实时控制,保证系统的供热品质。
结果表明,在复杂的供热系统控制中,采用BFO 算法优化的PID 控制器控制效果更好,能一定程度提高系统响应速度,减少超调量,缩短调节时间。
1.集中供热二次网温度控制系统换热站是集中供热系统中的枢纽环节,用于连接一次管网和二次管网,典型的换热站结构示意图如图1所示,热源提供的热能经过一次管网—换热站—二次网—热用户。
图1 换热站结构示意图为保障供热品质,应保持二次热网供水温度恒定。
控制过程中,通常设定二次网供水温度,若检测到实际温度与设定温度之间出现偏差,控制器会对一次网的电动阀阀门开度进行调节,相应增加或者减少热媒介的流量,最终使二次网供水温度稳定在设定值。
2.BFO算法BFO 算法(也称细菌觅食算法)最初起源于美国,现已在控制领域,函数优化,电力系统等方面得到广泛应用。
该算法模拟大肠杆菌的觅食过程,属于一种随机搜索智能算法,其优点是能够进行并行搜索,速度快,容易跳出局部极小值。
2.1 BFO算法的实现大肠杆菌在寻找食物过程中主要通过趋向性,群聚,复制以及驱散四种操作。
(1)趋向性趋向性包括翻转及游动两种方式。
觅食过程中,大肠杆菌对当前环境和上一个环境进行对比评价,若优于前者,表明更接近食物,继续朝着这个方向游动,否则,通过翻转来改变运动轨迹。
每一次状态的改变大肠杆菌都会进行评价,为下一步的运动提供决策信息。
算法中具体描述采用如下公式:表示位置信息,为步长,为随机向量,表示前进方向。
j 、k 、l 分别表示趋向性、繁殖、驱散的循环次数。
基于光纤荧光技术的温度监测系统设计

物联网技术 2023年 / 第11期240 引 言温度作为反映系统状态的重要特征,是监测系统运行状况和工业生产情况的重要指标[1],但是目前常用的温度监测系统在实际应用中还存在着诸多问题。
一是传统测温设备大多存在可靠性差、准确度低的缺点,并难以在腐蚀、高压、狭窄空间和强电磁干扰的环境中使用[2]。
应用最为广泛的热电偶、热电阻接触式测温技术,通过电信号获得温度值,但在强电磁干扰环境中使用受限[3];红外测温等非接触式测温技术基于红外线在不同温度下的折射光线强度不同进行测温,但对工作环境有较高要求[4]。
二是目前常见的监测方案存在信息滞后、通信不便的“信息孤岛”问题,缺乏远距离实时多源监测的手段。
三是多数监测系统应用场景单一,智能化程度低。
传统的系统监控及运行一般以集中式或者分布式的SCADA 系统应用为主,在区域广、布线困难的区段,数据的获取会变得困难。
针对以上关键问题,本文基于光纤荧光测温技术,设计一种光纤荧光温度传感器,利用其耐腐蚀、强绝缘、免维护、抗电磁干扰和稳定性较好等特点[5],提高测温的精度和准度,并解决其恶劣环境应用受限问题;通过无线桥接的方法,利用WiFi 模块对传感器进行组网,并基于“一套系统+N 个场景”的智慧系统设计框架,从感知层、传输层和应用层三方面进行创新,设计出一种使用范围广、集成化程度高的温度监测云平台系统。
1 系统总体设计基于光纤荧光技术的温度监测系统总体架构如图1所示,包括感知层、网络层和应用层。
感知层采用优化设计的光纤荧光测温传感器;网络层由网络管理系统、有线或无线数据网络组成,将传感器采集的温度信息通过网络传输给应用层;应用层由PC 端和云平台构成。
图1 温度监测系统总体架构1.1 感知层基于荧光光纤测温技术,优化设计一种小体积测温传感器,温度检测范围为-50~150 ℃,检测精度为±0.5 ℃。
着重进行光路和电路两方面设计,前者包括探头、光路耦合和光电探测器的选型和设计,后者着重对光源驱动电路和光电转换电路进行设计。
基于神经网络和遗传算法在换热站控制中的研究与仿真
基于神经网络和遗传算法在换热站控制中的研究与仿真
随着社会经济的发展,城市换热站的建设越来越普遍,而如何进行控制成为一个关键问题。
近年来,基于神经网络和遗传算法的控制方法备受研究者关注,并在未来某些情况下将能成为一种重要的控制手段。
神经网络是一种模仿生物神经系统的信息处理方式的数学模型,它由大量的互相连接的神经元组成。
基于神经网络的控制方法,便是在网络的训练过程中,使用大量的数据输入,通过神经元与神经元之间的连接和神经元之间的权重的调整,得到一个较好的控制方案。
而遗传算法则是基于生物进化理论而设计的一种优化算法。
它的工作原理是通过对问题空间的搜索和优化,找到目标问题的最优解。
通过适应度函数来对不同解进行评估,选出优先的解,通过不断的遗传变异,逐步迭代得到最优解。
基于神经网络和遗传算法相结合的换热站控制方法,其工作流程大致如下:首先,通过传感器获取进出水温度、流量、压力等参数的实时数据,再根据当前的数据及历史数据输入神经网络,得到一个输出结果;以此结果作为初步控制方案。
接下来,将初步控制方案作为种群,通过遗传算法进行交叉和变异,得到一批新的控制方案;并根据设定的适应度函数,对新的控制方案进行评估和选择。
如此循环迭代,直至得到最优方案。
市场数据表明,该控制方法在省电化意义上将持续发挥其优势,而在财务成本上也有所降低,具有极大的市场前景。
同时,如
要提高换热站的稳定性,减小在运行过程中出现的长时间波动,该控制方法的思想值得所有工程师的借鉴,激起研究者思考的空间很大。
综上所述,基于神经网络和遗传算法的控制方法具有巨大的优势和市场前景,并将在未来为城市换热站的稳定运行和高效控制上发挥关键作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第40卷 第6期 激光与红外V o.l40,N o.6 2010年6月 LA SER & I NFRA RED J une,2010文章编号:1001 5078(2010)06 0648 05 光电技术与系统 光纤惯组的第二级温控系统算法设计与仿真陈 勇,李 蕊,祝天瑞(重庆邮电大学网络化控制与智能仪器仪表教育部重点实验室,重庆400065)摘 要:由于光纤惯性测量组合对温度的敏感性,故需采用温控系统对惯组的温度进行控制以保证温度敏感器件的精度和稳定性。
为了获得更好的控制效果,本文采用两级温控方案,重点针对光纤惯性测量组合温控系统的第二级温控系统进行加热方案的论证,对光纤陀螺和加速度计进行热仿真分析,优化温度控制方案,并提出用遗传算法优化模糊PI D控制器的量化因子和比例因子,由此优化控制规则和隶属度函数。
仿真结果表明,这种算法能够获得比常规模糊PI D控制更好的控制效果,大大改善了系统的性能。
关键词:光纤陀螺;惯性测量组合;加速度计;热仿真;遗传算法;模糊PI D中图分类号:TP273 文献标识码:BDesign and simulation in temperat ure control al gorit h m of the second scale temperat ure control s ystem on t he FOG I MUC H EN Yong,L I Ru,i Z HU T ian ru i(K ey Labo ra tory o f N et wo rk Contro l&In telli g ent Instru m ent,M i n istry o f Educati on,Chongq i ng U n i versity o fP osts and T eleco mm un ica ti ons,Chongq i ng400065,Ch i na)Ab stract:Since t he FOG(fi be r optic gy roscope)and I M U(i nertial measure m ent unit)are sensiti v e to temperatare,temperatare co m tro l syste m must be used in the dev ices to guarantee the accuracy and stab ilit y.A t w o stag e contro lsche m e is adopted and the paperm a i n l y i ntroduces the deve l op m ent o f t he second stage.T he desi gn o f t he te m perat urecontro l syste m w as described.M ode lli ng of the FOG and I MU w as set up and si m ulation was m ade.G enetic A l go rith m(GA)w as used in the contro l sche m e.The qualif uy i ng and rati o factors o f the f uzzy P I D contro ller w as opti m ized.R esults show that t he a l go rith m effecti ve l y i m prove t he perfor m ance o f the te m pera t ure con tro l syste m.K ey w ords:fi ber opti c gy roscope;i nertial m eas ure m ent un it;acce lerom eter;the r ma l si m ulation;genetic a l gor it hm;fuzzy P I D1 引 言光纤陀螺对温度具有非常高的敏感性,工业化要求光纤惯组工作温度为-40~+60,因此容易产生因环境温度变化导致温度场不均匀而极大地影响了系统的精度与工作稳定性[1]。
如何在启动时限内控制光纤惯组到规定温度以保证各部件正常工作已成为一个重要的研究课题。
惯组的温控系统是保持陀螺及加速度计精度与性能的重要保证。
在设计温控系统时,常规的控制算法采用PI D及模糊PI D控制,但它们需要较多的经验知识并且在优化过程中极易陷入局部最优点。
而遗传算法是一种寻求全局最优并且不需任何初始信息的高优化方法。
本文把遗传算法对光纤惯组温控系统的模糊PI D算法中的量化因子和比例因子进行优化。
经过数字仿真验证了该算法的有效性和合理性,从而大大提高了整个温控系统的性能。
2 系统方案2.1 加热功率计算光纤惯组温控系统采取两级温控,一级针对惯 基金项目:重庆市教委项目(No.K J090525)资助。
作者简介:陈 勇(1963-),男,教授,博士,研究方向为智能机械及自动化装置或智能仪器表。
E m ai:l chenyong@收稿日期:2010 02 08;修订日期:2010 03 25组的壳体和支架,控制温度为(35!0.1),本文针对二级温控,要求控制敏感器表头在启动时限内(30m in)使4个光纤陀螺表头和4个加速度计表头达到稳定温度(60!0.05)。
为了能在规定时间内达到系统的加热参数要求,首先对加热允许功率进行计算。
由于系统的复杂性,视陀螺表头及加表表头为均一材质实心圆柱体,现对系统做如下假设与分析:(1)假设在加热过程中,加热片紧贴陀螺表头和加表表头外环面,不考虑热传导时的损耗。
(2)假设在加热过程中,陀螺表头及加表表头每个圆柱体下表面与支架之间不存在热传导(可通过加隔热垫片实现),这样暂不考虑这部分损耗;由此,加热过程中只有表头上表面存在对流形式的热损耗,且对流过程假设为无限大空间的平板散热,自由对流(层流);(3)假设在加热末端,圆柱体中心和外环面温差很小可忽略,25时,铝合金2A12的热导率 /(W m K)为117.2或188.4[3],可以认为足够大;这样就暂时不考虑30m in温度点是圆柱体内部温度差别;(4)假设在加热过程中,由于整个系统的运动,对流过程中热面一个向上,一个向下,两个竖直;四个加表表头同理设定;(5)假设加热片电热效率的传热总效率为80%;(6)假设加表表头重量为200g(参考重量100~ 200g,此处取最大值),每个陀螺表头重量为0.9kg,这样表头总重量为4.4kg;(7)假设加热过程中外界温度不变(此为极限条件),始终为-40。
功率推导如下:功率公式: W=P t(1)其中,W(J)是加热片提供的能量;P(W)是每个总加热功率;t(s)是加热时间。
能量公式: Q总=W (2)其中,Q总(J)是陀螺表头和加表表头得到的总能量; 是总的效率根据假设暂取80%。
Q总=Q加热+Q对流(3)其中,Q加热(J)是将陀螺表头和加表表头加热到要求温度所需要的热量,而Q对流(J)是每个圆柱体上表面和空气之间的对流散热消耗的能量。
Q加热=c m t=405240J(4)其中,c(J/kg )为铝合金2A12比热容[3],m单位为kg,是总的加热重量;t(K)是温差。
Q对流=Q陀螺对流+Q加表对流=Q陀螺上+Q陀螺下+2Q陀螺侧+Q加表上+Q加表下+2Q加表侧(5)其中,Q=F ! t,Q陀螺对流为四个陀螺表头对流损耗的热量,而Q加表对流为四个加表表头对流损耗的热量。
Q(J)为圆柱体上表面和空气之间的对流换热,适用于以上公式(5)中每一项表达式;F为导热面积, m2;!为换热系数,详见下述讨论;t(k)为温度差。
关于换热系数!,由参考文献[4]知:热面向上时,!=1.36 (tl)14,其中l为定型尺寸,l=0.9d,d为直径;热面向下时,!=0.592 (tl2)15,其中l为定型尺寸,l=0.9d,d为直径;热面竖直时,!=1.49 (th)14,其中h为高,此处也取为直径;在加热过程中根据假设(7),环境温度始终是-40,所以温差t是一直在变化的,变化由0 (系统温度也为-40时)一直到100(系统温度已经上升至60时)。
此时需要对整个过程进行积分运算,积分项即选定为t。
以陀螺中热面向上的一个为例:Q陀螺上=F ! t=∀1000(∀ (0.132)2 1.36 (tl)14 t)d t=433.693J其中,l=0.9d,其他同理,所以有:Q总=Q加热+Q对流=406896.2J根据式(1)、式(2),有:Q总=W =P t所以有:P=Q总t=282.567W可见,温控功率需要达到282.567W时,加热过程可以满足要求,因此,推荐温控功率在300W 左右。
2.2 硬件组成采用分级控制的实质是通过把热源分散开,使其尽可能分布在被控对象上,减小外界温度的干扰。
第一级温控针对惯组的台体温控,其主要目的是减小陀螺及加速度计与台体的温度差;同时,能够减小陀螺和加速度计的温度波动,提高温控系统的精度。
第二级温控在陀螺和加速度计上,进行精密温度控制,在第一级温控的基础上,使陀螺和加速度计稳定在工作温度。
本文针对二级温控,如图1所示为温649激光与红外 N o.6 2010 陈 勇等 光纤惯组的第二级温控系统算法设计与仿真控方案框图。
图1 温控方案框图Fi g .1 fl o w chart of te m perature con trol s yste m主处理器处理经过A /D 转换的多路数字式温度传感器采集的温度信号,经过基于遗传算法整定的Fuzzy-PI D 算法之后,得到相应的P WM 波,再经过光电隔离,功率放大来驱动加热膜对惯组进行加热。
2.3 分时段控制为了尽量缩短热不平衡状态的时间,减小热平衡状态与外界发生的热交换式的耗散功率,本系统采用分时控制方案,如图2所示。
图分时段控制图2 分时段温控方式Fig .2t e m perat u re contro l phase全速加热阶段(0~t 1),此时陀螺和加表的加热膜以全功率工作。
当接近各自的工作温度时,温控进入脉宽调制的第二阶段(t 1~t 2)。
此时,通过温度传感器采集的温度信号,综合所采用算法,计算出P WM 相应的占空比,控制各自的加热电流。
当温度接近期望值时,调整降低占空比,使温度平稳过渡到期望值,避免调节时间过长,同时避免局部温度过高。
3 陀螺和加表建模及热仿真分析3.1 陀螺和加表的温度建模陀螺包括外罩、环体、上盖、定位法兰、光纤环结构比较复杂。