飞思卡尔智能车大赛特等奖技术报告(节选)
飞思卡尔智能车大赛技术报告
第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告学校:中北大学伍名称:ARES赛队员:贺彦兴王志强雷鸿队教师:闫晓燕甄国涌关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:2014-09-15日摘要本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。
机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。
硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。
软件上以经典的PID算法为主,辅以小规Bang-Bang算法来控制智能车的转向和速度。
在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅助调试。
关键字:智能车摄像头控制器算法。
目录1绪论 (1)1.1 竞赛背景 (1)1.2国内外智能车辆发展状况 (1)1.3 智能车大赛简介 (2)1.4 第九届比赛规则简介 (2)2智能车系统设计总述 (2)2.1机械系统概述 (3)2.2硬件系统概述 (5)2.3软件系统概述 (6)3智能车机械系统设计 (7)3.1智能车的整体结构 (7)3.2前轮定位 (7)3.3智能车后轮减速齿轮机构调整 (8)3.4传感器的安装 (8)4智能车硬件系统设计 (8)4.1XS128芯片介绍 (8)4.2传感器板设计 (8)4.2.1电磁传感器方案选择 (8)4.2.2电源管理模 (9)4.2.3电机驱动模块 (10)4.2.4编码器 (11)5智能车软件系统设 (11)5.1程序概述 (11)5.2采集传感器信息及处理 (11)5.3计算赛道信息 (13)5.4转向控制策略 (17)5.5速度控制策略 (19)6总结 (19)6.1效果 (20)6.2遇到的问题以及解决办法 (20)6.3队员之间的合作很重要 (21)附录 (22)源程序 (23)1绪论1.1 竞赛背景随着经济发展,道路交通面临新的问题和新的挑战。
飞思卡尔智能车技术报告
第六届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:队伍名称:参赛队员:带队教师:关于技术报告和研究论文使用授权的说明本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要随着现代科技的飞速发展,人们对智能化的要求已越来越高,而智能化在汽车相关产业上的应用最典型的例子就是汽车电子行业,汽车的电子化程度则被看作是衡量现代汽车水平的重要标志。
同时,汽车生产商推出越来越智能的汽车,来满足各种各样的市场需求。
本文以第六届全国大学生智能车竞赛为背景,主要介绍了智能车控制系统的机械及硬软件结构和开发流程。
机械硬件方面,采用组委会规定的标准 A 车模,以飞思卡尔半导体公司生产的80管脚16 位单片机MC9S12XS128MAA 为控制核心,其他功能模块进行辅助,包括:摄像头数据采集模块、电源管理模块、电机驱动模块、测速模块以及无线调试模块等,来完成智能车的硬件设计。
软件方面,我们在CodeWarrior IDE 开发环境中进行系统编程,使用增量式PD 算法控制舵机,使用位置式PID 算法控制电机,从而达到控制小车自主行驶的目的。
另外文章对滤波去噪算法,黑线提取算法,起止线识别等也进行了介绍。
关键字:智能车摄像头图像处理简单算法闭环控制无线调试第一章引言飞思卡尔公司作为全球最大的汽车电子半导体供应商,一直致力于为汽车电子系统提供全范围应用的单片机、模拟器件和传感器等器件产品和解决方案。
飞思卡尔公司在汽车电子的半导体器件市场拥有领先的地位并不断赢得客户的认可和信任。
其中在8 位、16 位及32 位汽车微控制器的市场占有率居于全球第一。
飞思卡尔公司生产的S12 是一个非常成功的芯片系列,在全球以及中国范围内被广泛应用于各种汽车电子应用中。
飞思卡尔智能车技术报告
第六届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:队伍名称:参赛队员:带队教师:关于技术报告和研究论文使用授权的说明本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要随着现代科技的飞速发展,人们对智能化的要求已越来越高,而智能化在汽车相关产业上的应用最典型的例子就是汽车电子行业,汽车的电子化程度则被看作是衡量现代汽车水平的重要标志。
同时,汽车生产商推出越来越智能的汽车,来满足各种各样的市场需求。
本文以第六届全国大学生智能车竞赛为背景,主要介绍了智能车控制系统的机械及硬软件结构和开发流程。
机械硬件方面,采用组委会规定的标准 A 车模,以飞思卡尔半导体公司生产的80管脚16 位单片机MC9S12XS128MAA 为控制核心,其他功能模块进行辅助,包括:摄像头数据采集模块、电源管理模块、电机驱动模块、测速模块以及无线调试模块等,来完成智能车的硬件设计。
软件方面,我们在CodeWarrior IDE 开发环境中进行系统编程,使用增量式PD 算法控制舵机,使用位置式PID 算法控制电机,从而达到控制小车自主行驶的目的。
另外文章对滤波去噪算法,黑线提取算法,起止线识别等也进行了介绍。
关键字:智能车摄像头图像处理简单算法闭环控制无线调试第一章引言飞思卡尔公司作为全球最大的汽车电子半导体供应商,一直致力于为汽车电子系统提供全范围应用的单片机、模拟器件和传感器等器件产品和解决方案。
飞思卡尔公司在汽车电子的半导体器件市场拥有领先的地位并不断赢得客户的认可和信任。
其中在8 位、16 位及32 位汽车微控制器的市场占有率居于全球第一。
飞思卡尔公司生产的S12 是一个非常成功的芯片系列,在全球以及中国范围内被广泛应用于各种汽车电子应用中。
飞思卡尔智能车竞赛光电平衡组技术报告
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告关于技术报告和研究论文使用授权地说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文地规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品地设计方案、技术报告以及参赛模型车地视频、图像资料,并将相关内容编纂收录在组委会出版论文集中.参赛队员签名:带队老师签名:日期:摘要本文介绍了常熟理工学院物电电磁一队电磁车地成果.智能车地硬件平台采用带MC9S12XS128 处理器,软件平台为CodeWarrior IDE 开发环境,车模采用大赛组委会统一提供地A型车模.文中介绍了智能车机械结构调整,传感器电路设计,舵机、电机控制算法以及起跑线地检测等.车模以MC9S12XS128单片机为控制核心,以安装在车体前地工字电感作为循迹传感器,采用干簧管检测起跑线,以欧姆龙编码器检测速度信息.车模系统地简单工作原理是MC9S12XS128单片机通过AD口采集电感检测地拟量,并通过算法处理,然后返回值用于舵机控制,根据编码器返回值进行电机地闭环控制.通过串口,借用蓝牙等工具进行舵机PD参数,电机PID地调节,以及整定传感器参数地整合处理.关键字:智能车、电机PID控制、舵机PD控制、电磁寻线目录第一章总体方案设计----------------------------------------------------------------- 6第二章智能车机械结构调整与优化---------------------------------------------- 82.1 主销内倾 -------------------------------------------------------------- 92.2 主销后倾 -------------------------------------------------------------- 92.3 外倾角---------------------------------------------------------------- 102.4 车轮安装示意图如下:------------------------------------------- 122.5 舵机地安装--------------------------------------------------------- 122.6 舵机安装示意图如下:------------------------------------------- 132.7 小结-------------------------------------------------------------------------- 13第三章电路设计说明--------------------------------------------------------------- 133.1 电源模块 ------------------------------------------------------------------- 143.2 传感器模块 ---------------------------------------------------------------- 143.3 电机模块 -------------------------------------------------------------------- 153.4 舵机模块 -------------------------------------------------------------------- 153.5最小系统板设计 ----------------------------------------------------------- 163.6系统主板设计 -------------------------------------------------------------- 173.7小结--------------------------------------------------------------------------- 17第四章智能车控制软件设计说明 ------------------------------------------------ 194.1 软件设计总体框架------------------------------------------------------- 194.2 电机PID控制 ------------------------------------------------------------ 194.3 舵机地控制 ---------------------------------------------------------- 234.4 传感器数据地处理------------------------------------------------------- 244.5 小结-------------------------------------------------------------------------- 24第5章开发工具、制作、安装、调试过程说明 ----------------------------- 245.1 软件编译环境 ------------------------------------------------------ 245.2 显示模块 ------------------------------------------------------------- 255.3 蓝牙调试模块 ------------------------------------------------------ 255.4 上位机调试 --------------------------------------------------------- 265.5 本章小结 ------------------------------------------------------------ 27模型车地主要技术参数说明 ------------------------------------------------------- 28结论 -------------------------------------------------------------------------------------- 29参考文献 -------------------------------------------------------------------------------- 30附录A:程序源代码 ---------------------------------------------------------------- 31引言智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体地综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型地高新技术综合体.目前对智能车辆地研究主要致力于提高汽车地安全性、舒适性,以及提供优良地人车交互界面.近年来,智能车辆己经成为世界车辆工程领域研究地热点和汽车工业增长地新动力,很多发达国家都将其纳入到各自重点发展地智能交通系统当中.熒绐譏钲鏌觶鷹緇機库。
2024年飞思卡尔智能车总结

2024年飞思卡尔智能车总结
2024年飞思卡尔智能车在技术、市场和发展方面取得了重要进展。
在技术方面,飞思卡尔智能车在感知、决策和控制方面取得了显著的提升。
通过引入先进的传感器技术、深度学习算法和决策系统,智能车能够更准确地感知周围环境,并作出更精准的决策。
此外,智能车的控制系统也得到了改进和优化,使得车辆在各种复杂的道路条件下能够更安全、稳定地行驶。
在市场方面,飞思卡尔智能车取得了良好的销售业绩和市场份额。
随着智能汽车的普及,越来越多的消费者开始关注智能车的安全性、效率和便利性。
飞思卡尔智能车凭借其卓越的技术和可靠的性能,获得了广大消费者的认可和信赖,进一步扩大了市场份额。
在发展方面,飞思卡尔智能车与各大汽车制造商、科技公司和城市机构建立了紧密的合作关系。
通过合作,飞思卡尔能够更好地了解市场需求,持续改进和创新智能车技术。
此外,飞思卡尔还积极参与智能交通系统和城市智能化建设,为城市提供更安全、高效的交通解决方案。
综上所述,2024年飞思卡尔智能车在技术、市场和发展方面都取得了显著的进展,为智能汽车行业的发展做出了积极贡献。
未来,飞思卡尔将继续致力于推动智能车技术的发展,为用户提供更智能、更安全的出行体验。
第 1 页共 1 页。
飞思卡尔智能车大赛杭州电子科技大学杭电二队智能车技术报告
本设计采用单片机(MC9S12DG128)作为智能小车的检测和控制核心。
路径识别采用CMOS 摄像头,车速检测采用红外对管和编码盘,由MOS管组成H桥来控制驱动电机正反转的快速切换,利用PWM技术控制小车的运动速度及运动方向。
基于这些完备而可靠的硬件设计,还设计了一套PID优化算法,编写了全闭环运动控制程序,经反复测试,取得了较好的效果。
第一章引言.1 智能车系统研究内容智能车系统要求以MC9S12DG128为核心,能够自主识别路线,在专门设计的跑道上自动识别道路行驶,以最快的速度跑完全程。
其主要研究内容包括以下几个部分:电源、路径识别、直流电动机驱动及运动控制等。
1.1.1 电源根据智能车系统各部件正常工作的需要,对配发的标准车模用7.2V 1800mAh Ni-cd电池进行电压调节。
其中,单片机系统、车速传感器电路需要5V电压,摄像头的12V工作电压由DC-DC升压回路提供,伺服电机工作电压范围4.8V到6V,直流电机经过H桥路由7.2V 1800mAh Ni-cd蓄电池直接供电。
1.1.2 路径识别路径识别模块是智能车系统的关键模块之一,路径识别方案的好坏,直接关系到最终性能的优劣。
在高速度和预先判断算法的前提下,摄像头可能是寻找路径规迹的最好选择。
因为MC9S12DG128的运算处理和AD采样速度有限,因此确定合理的采样次数和合理的处理摄像头的数据是十分重要的。
舍弃非关键数据进行数据简化和制定高效率的路径规划也是一个难题。
1.1.3 直流电动机驱动直流电机的控制一般由单片机产生的PWM信号配以H桥路来完成。
为了得到更大的驱动电流和较好的刹车效果,选用低内阻的MOS管和适当的反向驱动也是必需的。
MOS管我们选取了IRF4905和IRFZ48N,在MOS管子的驱动方面我们直接使用IR公司的IR4427双道驱动芯片。
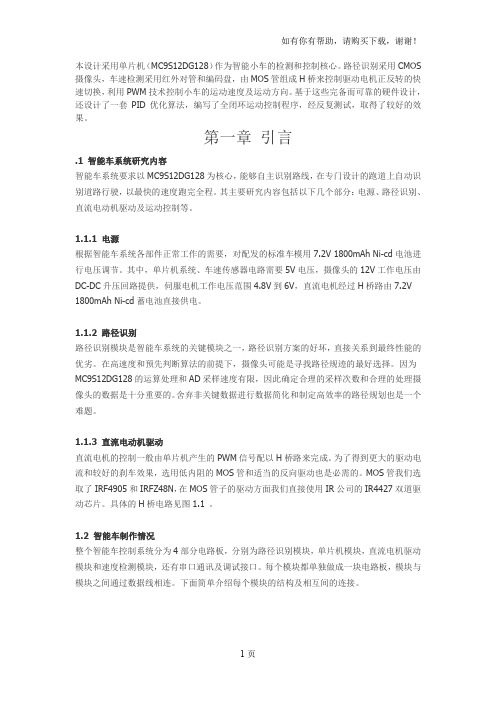
具体的H桥电路见图1.1 。
1.2 智能车制作情况整个智能车控制系统分为4部分电路板,分别为路径识别模块,单片机模块,直流电机驱动模块和速度检测模块,还有串口通讯及调试接口。
第四届飞思卡尔杯智能车大赛技术报告 北京工商大学

摘要随着数字图像处理技术的发展,面阵CCD摄像头在自动控制领域得到了越来越广泛的应用。
本文在对CCD图像处理技术和单片机嵌入式应用进行深入研究的基础上,借鉴国内外先进技术,研制出了具有自动循迹,转弯,加减速功能的智能小车。
本文介绍了基于面阵CCD图像处理技术以及MC9S12DG128微控制器嵌入式技术的智能小车的设计原理及研制过程。
论述了智能小车自动控制系统的实现方法,着重讨论了智能小车的硬件设计和以Codewarrior C交叉编译器为开发工具的软件设计。
在智能小车的研制过程中,利用CCD摄像头采集到的图像存在杂点和误差,这对单片机的控制影响较大,因此需要运用图像处理技术对数字图像进行处理,以达到对黑线正确识别的目的。
关键词:智能小车; CCD; MC9S12DG128微控制器;图像处理AbstractWith the development of treatment technology of the digital picture , plane array CCD camera has got more and more extensive application on the automatic controlled field.This text is on the basis of the thing that use and further investigate to CCD image processing technology and single-chip computer embeddedly, learns from domestic and international advanced technology, develop and follow the mark automatically, turn, add the intelligent car which moderates the function. The introduction to this text is on the basis of plane array CCD image processing technology and the design principle of the intellectual car of MC9S12DG128 microcontroller embedded technology and research course. Havedescribed the implementation method of the automatic control system of intellectual car , have discussed emphatically the hardware of the intellectual car is designed and as the software design of the developing instrument with Code-warrior C compiling device alternately.In the course of research of the intelligent car , utilize the picture that CCD camera gathers to noise and error, this makes a great influence on control of the single-chip computer, so need to use the image processing technology to deal with the digital picture , in order to achieve the correct purpose that discerns to the black line.Keywords:Intelligent car ; CCD ; MC9S12DG128microcontroller ;Image processing目录1.1背景简介 (1)1.2本课题研究的目的及意义 (2)1.3国内外相关技术的发展现状 (3)1.3.1国外智能小车的发展状况 (3)1.3.2国内智能小车的发展状况 (4)1.4系统设计要求 (5)1.5智能小车的设计思路 (5)1.6本文主要研究内容 (6)1.7本文的篇章结构 (7)2.1路径识别方案设计论证 (7)2.1.1 方案一:基于光电传感器阵列的路径识别方案 (7)2.1.2 方案二:基于线阵CCD图像传感器的路径识别方案 (8)2.1.3 方案三:基于面阵CCD图像传感器的路径识别方案 (8)2.1.4 所选方案 (8)2.2面阵CCD图像传感器简介 (8)2.3面阵CCD图像传感器的工作原理 (9)2.4面阵CCD图像传感器的选择 (10)2.5图像处理方法 (10)2.5.1 图像处理技术基础 (11)2.5.2 图像的灰度变换 (11)2.5.3 图像的平滑处理 (11)2.5.4 图像边缘检测 (12)2.6本章小结 (13)3.1机械方面设计及改进 (13)3.1.1 车模基本参数 (13)3.1.2 CCD摄像头的设计安装 (14)3.1.3 底盘参数设计改进 (14)3.1.4 齿轮传动机构调整 (15)3.1.5 后轮差速机构调整 (15)3.1.6驱动电机介绍 (16)3.1.7 舵机介绍 (17)3.2智能小车电路设计 (19)3.2.1 所选用单片机介绍 (19)3.2.2 硬件电路系统组成 (22)3.2.3 供电电路 (23)3.2.4 时钟电路 (24)3.2.5看门狗电路 (25)3.2.6 电源稳压电路 (25)3.2.7 驱动电机/舵机电路 (26)3.2.8 CCD摄像头数据采集分离电路 (27)3.2.9 A/D采集电路设计 (28)3.3本章小结 (29)4.1软件设计环境 (30)4.2软件整体设计方案 (30)4.3程序评测及流程 (31)4.4程序模块介绍 (34)4.4.1 初始化 (34)4.4.2 摄像头图像数据采集以及处理 (35)4.4.3 速度采集以及速度控制 (42)4.5黑线提取算法 (42)4.6本章小结 (42)5.1软件开发平台C ODEWARRIOR IDE (43)5.1.1 Codewarrior IDE 功能介绍 (43)5.1.2 Codewarrior IDE 基本使用方法 (44)5.2本章小结 (48)第1章绪论1.1背景简介车辆与我们的社会生活息息相关,然而当今车辆的智能化发展还不是很迅速,特别是在安全性,智能化,车与路之间交互信息等方面。
freescale智能车技术报告
第三届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告附件A程序源代码附件B模糊算法在智能车控制中的应用学校:中国民航大学队伍名称:航大一队参赛队员:贾翔宇李科伟杨明带队教师:丁芳孙毅刚关于技术报告和研究论文使用授权的说明本人完全了解第三届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第一章引言 (1)第二章智能车设计制作思路以及实现方案概要 (2)第三章硬件电路设计 (4)3.1 黑线检测电路 (4)3.2系统电路 (4)3.2.1 单片机最小系统 (5)3.2.2 接口电路 (5)3.2.3 调试电路 (5)3.2.4 电源电路 (5)3.3电机驱动电路 (6)3.4 测速电路 (6)第四章机械改造及电路板设计安装 (7)4.1 机械部分安装及改造 (7)4.1.1 舵机的改造 (7)4.1.2 前轮定位 (7)4.2 传感器的设计及安装 (7)4.2.1 黑线检测传感器 (7)4.2.2 测速传感器 (8)4.3 电机驱动电路板的设计及安装 (8)4.4 系统电路板的固定及连接 (9)4.5 整体结构总装 (9)第五章微处理器控制软件主要理论、算法说明及代码介绍 (10)5.1模糊控制原理 (10)5.2 控制算法说明 (10)5.3 程序代码介绍 (11)5.4 数字滤波器设计 (13)5.4.1传感器基准值初始化滤波器设计 (13)5.4.2行驶过程中采样信号滤波器设计 (13)第六章安装调试过程 (15)第七章EEPROM辅助调试 (16)7.1 EEPROM概述 (16)7.2 EEPROM擦除和编程步骤 (16)7.3 EEPROM编程命令字及其含义 (17)7.4 EEPROM使用中可能遇到的问题进行说明 (17)7.4.1如何修改ROM/RAM/EEPROM的地址 (17)7.4.2 如何将EEPROM中的数据读出 (18)第八章模型车主要技术参数说明 (19)第九章总结 (20)1第一章引言全国大学生飞思卡尔杯智能汽车竞赛已经成功举办过两届了,智能汽车的速度越来越快,技术也越来越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009年飞思卡尔智能车大赛特等奖技术报告(节选)
作者:李嵩孙文静瞿佳璐上海大学
关键词:飞思卡尔智能车摄像头偏振镜图像采集 FTTx
车模的机械部分是影响其行驶性能最直接的部分,其重要性不言而喻。
一个不良的机械系统会增加控制的难度,会为车模的速度提升带来障碍。
因此,车模的机械性能应该是优先考虑的问题。
摄像头的安装
大量事实证明,重心越低越好。
为降低重心,并同时保证图像视野宽度,最好的方法就是使用旋转摄像头。
在08年的第三届比赛中,摄像头-舵角连动机构在RacerX的车上取得了出人意料的成效,但也暴露出了一些机构固有的问题,其中包括:机构虚位导致摄像头定位不准,摄像头在中位附件容易振荡。
因此需要对机构进行改良。
改良方法如下。
(1) 增加自动回正机构,给旋转摄像头提供自动回正力矩,以减小机构虚位。
(2) 给旋转摄像头机构调静平衡,减少车模在过弯过程中离心力对摄像头的影响。
(3) 用滑槽代替原本中间的连杆球头,为旋转摄像头在中位附近制造一段死区,使车模在打小角度舵角时,摄像头不转,从而增加车模在直线和小S弯中的稳定性。
改良的机构三维图如图2所示。
综上所述,这是一个带有死区及自动回正机构的旋转摄像头机构。
此外,在控制方面,可以设法检测出摄像头旋转的角度,并将其反馈在控制算法里。
检测摄像头角度的方法大致有以下两种:
(1) 在车头划线做标记,用摄像头检测车头标记,来判断自己所转的角度。
(2) 由于舵机S3010是模拟舵机,其中是用电位器来反馈舵角的,因此可以将此电位器的信号飞线引出来,用单片机内部AD进行采集。
偏振镜的使用
由于追求更好的机械性能,我们把摄像头降低,达到降低重心的目的。
但是由此带来了反面的影响,那就是图像的形变以及受到跑道面反光的影响。
跑道上的黑线由于反光原因,摄像头检测的数据丢失黑线。
为了解决反光导致检测不到黑线的问题,我们利用了偏振镜。
偏振镜的作用其实是过滤掉某个角度的偏振光,实现检偏的作用。
当自然光经过跑道面以后,会产生偏振光,这反射的偏振光会影响到图像的采集。
通过在摄像头前面安装偏振镜片,并且调整偏振镜片的检偏角度,可以得到几乎无反光影响的图像。
如图3所示。
不过,使用偏振镜也会带来问题。
虽然偏振镜能把跑道的偏振光过滤掉,但同时把环境的自然光强度降为原来光强的二分之一,也就是说通过偏振镜之后光线变暗了。
在光线强度较大的时候不会有太大影响,但是如果环境光比较弱的时候,加了偏振镜会使摄像头感应的光线更弱,而大多数摄像头具有自动曝光功能,在光线昏暗时,摄像头会自动增加曝光时间,导致图像更容易模糊。
因此,使用偏振镜要合理权衡利与弊才能发挥偏振镜的作用。
图像采集模块
清晰稳定的图像是一切的基础,因此今年我们在摄像头选择和多种采集方案的测试上花了很多功夫。
摄像头选择
由于CMOS摄像头重量轻、功耗低,因此依然十分有吸引力,所以我们对CMOS与CCD再次进行对比测试,测试用的CMOS摄像头为康美迪亚的1/3 CMOS,图4为CMOS摄像头与CCD摄像头的原始图像,可以看到CMOS图像中的噪点远远多于CCD的图像。
并且CMOS摄像头在拍摄运动图像时容易发生模糊。
动态图像模糊主要是在光线较暗的环境下,为了保持图像亮度,摄像头自动将曝光时间增大所致。
要彻底避免图像模糊情况的出现,就要手动设置摄像头曝光时间,于是我们又测试了1/3数字摄像头OV7620,通过SCCB将摄像头设置到手动模式,手动修改其曝光时间。
图像采集方案
今年我们测试了很多种采集方案,首先由于更换了主频更高的S12XS128,我们对其内部AD又进行了测试,结果很失望,尽管主频增高,最高精度从10bit增加到了12bit,但是AD的转换时间并没有多少改善,88MHz主频下行像素在80左右。
之后我们又测试了外部二值化采集、数字摄像头采集、外部AD加LM1881采集、视频解码芯片采集。
其中视频解码芯片图像质量最好,并且有图像预处理电路,但由于实验电路还在测试阶段,本次比赛并没有启用,仍然延用了去年的外部AD采集方案。
电机驱动模块
去年我们使用SI4430,模仿电子调速器制作了驱动电路,取得了不错的效果,但是对于能耗刹车的刹车能力始终存在争议,因此我们对能耗刹车和反压刹车做了对比测试。
参考第三届上海交大SpeedStar队的技术报告,我们使用BTS7970制作了驱动电路,其原理如下。
该电路有一路PWM输入,两根I/O线作为模式选择线,可以有正转、反转、能耗刹车三种工作模式。
我们使用“白骑士”模型车的驱动电路与上述电路(图5)进行对比测试,图6是车模的速度曲线,其中浅色的线为给定速度,深色的线为实际速度,纵坐标单位为mm/s,横坐标单位为帧(即40ms)。
比较以上速度曲线,两种驱动在加速能力上相差不大,而反压刹车的减速能力远高于能耗刹车。
因此,可以得出结论,对于比赛所提供的380电机而言,10mW左右内阻的驱动电路已经足以满足要求,反压刹车的效果是远好于能耗刹车的,而用BTS7970制作驱动电路是一个简单易行方案。
SD卡
SD卡实时存储系统是我们去年率先提出和使用的辅助调试手段,极大地提高了调试效率,今年我们继续延用并对SD卡存储的速度和稳定性做了改进。
去年我们使用的MC9S12DG128,在设计之初主要考虑到SD卡为3.3V系统,而单片机为5V系统,之间需要逻辑电平转换,为此我们在设计SD卡电路时在单片机输入端加了三极管放大。
今年我们使用的MC9S12XS128可以支持3.135V到5.5V的宽电压供电,我们使用3.3V供电就可以实现与SD卡接口的直连,这样可以提高读写SD卡的稳定性。
参考文献:
[1] 邵贝贝. 单片机嵌入式应用的在线开发方法[M]. 北京:清华大学出版社. 2004年10 月第1 版
[2] 卓晴, 黄开胜, 邵贝贝. 学做智能车[M]. 北京:北航出版社, 2007.3
[3] 林辛凡, 李红志, 黄颖. 清华三角洲队技术报告[R].2008
[4] 秦召兵,师恩义,王力. 东北大学猎豹队技术报告[R].2008
[5] 胡晨晖, 陆佳南,陈立刚.上海交通大学CyberSmart 队技术报告[R].2008。