半潜式平台深水锚泊系统三维时域动力分析
深水半潜式钻井平台系泊系统方案设计与分析的开题报告

深水半潜式钻井平台系泊系统方案设计与分析的开题报告一、选题背景深水半潜式钻井平台是一种海洋工程设备,用于在海洋中进行石油钻探和开采等作业。
深海环境中,海浪、洋流、风力等自然因素易造成平台失稳和移动,影响钻井作业的正常进行。
为了解决这一问题,深水半潜式钻井平台需要设计一套系泊系统,以确保平台的稳定性和安全性。
系泊系统方案的设计和分析是该领域的研究热点之一。
二、研究内容本文旨在研究深水半潜式钻井平台系泊系统的方案设计和分析问题,具体研究内容包括以下几个方面:1. 系泊系统的功能和特点:探讨系泊系统在深水半潜式钻井平台中的作用和特点,揭示其在钻井作业中的重要性。
2. 系泊系统方案的设计:介绍深水半潜式钻井平台系泊系统的设计方法和流程,包括方案设计的原则、计算方法等。
3. 系泊系统方案的优化:探索系泊系统方案的优化方法,包括优化设计流程、优化系泊设备选型和工艺参数、提高系泊系统的效率等。
4. 系泊系统方案的分析:通过数值模拟或计算机仿真等手段,对系泊系统方案进行分析和评价,得出合理的成果,并进行验证和应用。
三、研究意义深水半潜式钻井平台系泊系统方案的设计和分析是保障深海石油勘探和开采作业安全和效率的关键。
本文的研究成果将为该领域的研究和应用提供理论和技术支持,为相关企业提供参考和指导。
四、研究方法本文将采用文献调研、方案设计、优化分析和数值模拟等方法进行研究。
首先,对深水半潜式钻井平台系泊系统的研究现状、发展趋势和关键技术进行文献综述和分析。
然后,基于系统工程原理和技术方法对钻井平台的系泊系统方案进行设计和优化。
最后,采用数值模拟软件对优化方案进行验证和应用。
五、预期成果本文的预期成果包括以下几个方面:1. 深入探讨深水半潜式钻井平台系泊系统的功能和特点,为深海石油勘探和开采提供理论基础。
2. 提出一套系泊系统方案设计和分析方法,包括设计原则、计算方法、优化策略等,为相关企业提供技术支持。
3. 通过数值模拟或计算机仿真,验证和应用系泊系统优化方案,为现场施工提供指导和保障。
半潜式平台水动力性能及运动响应研究综述

半潜式平台水动力性能及运动响应研究综述本文对半潜式平台的水动力性能及运动响应的研究进行了一个综述,首先简单介绍了半潜式平台的概念及特性,然后围绕水动力性能及运动响应研究进行了一步步地累述:首先,讨论了半潜式平台水动力性能及运动响应的研究方法,以及用于测量特定型号半潜式平台水动力性能和运动响应的模型试验方法。
随后,是对半潜式平台水动力性能模型结果的讨论,包括水动力驱动力及阻力的研究,以及半潜式平台的静态漂移与操纵性的研究。
接着,综述了半潜式平台的动态响应性能,主要包括船体振摆及螺旋桨推进器的动态响应性研究。
此外,本文也就半潜式平台的航行稳定性进行了讨论,尤其是涉及航行稳定性的控制系统及航行稳定性综合评定方法。
最后,为了更好地实现半潜式平台,文中还介绍了将多学科知识应用于半潜式平台性能模拟与分析的研究方法,以及对不同形态设计参数及性能技术指标的综合优化方法。
综上所述,本文从动力性能研究、航行稳定性研究和优化研究等方面综述了半潜式平台的水动力性能和运动响应的研究内容。
通过本文的研究,将有助于深入探讨半潜式平台水动力性能和运动响应的机理,为未来半潜式平台性能设计提供参考。
半潜式平台是一种具有特殊性能的水上运动器,它拥有更强的抗风性、抗浪性、高速性和低抗翻性等特点,有助于解决抗风抗浪条件下的航行安全问题。
近几年来,随着结构、动力和控制系统等关键技术的发展,半潜式平台的应用已经得到了快速发展,它的应用范围从水下雷达、水下工程、电缆拖拉到海洋搜救等多个领域都有涉及。
由于半潜式平台具有较为复杂的水动力特性和较弱的阻力性能,因此,对它性能研究的进展也感到尤为重要。
因此,本文对半潜式平台水动力性能及运动响应的研究进行了一个分析综述,旨在为将来对它进行进一步性能改进提供参考。
参考文献:[1]海秋,半潜式平台,上海,上海交通大学出版社,2015。
[2]龙飞,半潜式平台水动力性能及运动响应的仿真分析,硕士论文,西安交通大学,2013。
半潜式海洋平台极限海况下的水动力性能分析

第18卷 第1期 中 国 水 运 Vol.18 No.1 2018年 1月 China Water Transport January 2018收稿日期:2017-09-28作者简介:陈泽华(1990-),男,华南理工大学土木与交通学院 硕士生,研究方向为船体结构疲劳;船舶与海洋工程水动力学。
半潜式海洋平台极限海况下的水动力性能分析陈泽华摘 要:本文主要应用ANSYS 中的AQWA 模块对某简化的半潜式海洋平台模型进行分析以研究半潜式海洋平台的水动力性能。
应用workbench 将简化的模型导入AQWA 中,模拟该半潜式平台在给定的风浪流联合载荷作用下的运动响应,进行对平台系泊链的时域耦合分析,得出各系泊链的受力情况,并初步分析极限海况下平台是否满足安全生产需求。
关键词:AQWA ;半潜平台;水动力分析中图分类号:U674.38 文献标识码:A 文章编号:1006-7973(2018)01-0016-03半潜式平台如今被广泛应用自有其优点,实用性上有着抗风能力强,作业功能广,作业水域深的优点,经济性上有着投资相对少的优势。
半潜式平台长期处于恶劣的海洋环境中,为保证平台的正常作业以及自存状态的安全性,需准确确定半潜平台在海洋环境载荷作用下的运动响应及其系泊缆张力响应。
系泊系统定位主要有两种方式,悬链线系泊系统和张紧式系泊系统,目前张紧式系泊系统对于半潜式平台是最常用的系泊方式。
系泊缆的质量和阻尼对系泊系统的影响随水深的增加而变大,系泊缆的质量和阻尼同时会被平台自身的运动所影响。
所以,平台与系泊系统之间的耦合作用不容忽视。
一、半潜式平台运动分析理论 1.水动力分析方法目前对于半潜式平台水动力性能计算的理论方法主要有三种:基于Morison 公式进行计算;基于二维势流理论;基于三维势流理论。
2.坐标系选取半潜式平台的坐标原点取在静水面上,x 轴沿平台纵向;z 轴与x 轴垂直,方向竖直向上并通过平台的重心;y 轴沿平台横向。
半潜式平台工作原理和结构特点分析
半潜式平台工作原理和结构特点分析提要半潜式平台工作原理、性能特.点、类型、结构组成和特.点分析,设计工况及其在近海石油勘探开发中的作用。
1半潜式平台工作原理2半潜式平台是浮动型的移动式平台,其稳性主要靠稳性立柱,它也是柱稳式平台。
柱稳式平台包括半潜式和坐底式平台,坐底式平台在浅水作业,半潜式平台主要在深水作业,但也可以在浅水坐底作业,作业时和坐底式平台性能相同。
半潜式平台是用数个具有浮力的立柱将上壳体连接到下壳体或柱靴上,并由其浮力支持的平台。
在深水半潜作业时,下壳体或柱靴潜入水中,立柱局部潜入水中,为半潜状态;浅水坐底作业时,下壳体或柱靴坐在海底为坐底状态。
半潜式钻井平台的产生晚于浮船式(水面式)平台,它是克服了浮船式钻井平台抗风浪性能差的缺点而产生的。
它可以在深水海域、恶劣环境条件下作业,具有良好的运动特性,抗风浪性能好。
半潜式平台在设计中巧妙地运用了以下原理,使其减小外力,增加稳性,具有良好的性能。
1.1 利用半潜原理减小平台的波浪力半潜式平台最大特点是半潜作业,半潜状态下,将大体积的下壳体或柱靴潜到水下一定深度,从而使波浪力大大减小,避开了海面波浪作用区,因此,它比浮船式平台浮在海面所受的波浪力小得多。
1.2 利用稳定大立柱和立柱大间距原理增加平台稳性半潜式平台另一特点是柱稳式平台,即利用立柱保证平台的稳性。
它在半潜状态时,其水线面积主要是立柱的水线面积,水线面积虽不大,但立柱间距较大,因而平台的惯性矩较大,使其有较大的初稳性高度。
它比浮船式平台惯性矩大得多。
1.3 利用外力互相抑制原理减小平台运动合理地选择平台立柱横向和纵向间距,可以使外力互相抵消一部分,而使平台运动减小。
例如对于两个下壳体、左右两排立柱的半潜式平台,当立柱横向间距设计为波浪的半波长时,作用在平台两边的立柱、下壳体的波浪‘盼性力大小相等,方向相反,互相平衡,使平台运动减小。
当波峰位于平台中心线时,左、右两边的立柱、下壳体同时受到向外的劈力,其力的方向相反、大小相等,互相平衡;之,若波谷位于平台中心线时,左、右两边的立柱、下壳体同时受到向内的挤压力,也互相平衡。
半潜式平台水动力性能及运动响应研究综述

半潜式平台水动力性能及运动响应研究综述半潜式平台是一种广泛应用于海洋工程领域的水上工作平台。
它采用半潜式设计,即平台部分浸入水中,部分露出水面。
由于其良好的稳定性和适应性,半潜式平台在海洋勘探、油气开发、风能利用等领域得到了广泛应用。
为了保证半潜式平台在复杂的海洋环境下的安全性和可靠性,对其水动力性能及运动响应进行研究至关重要。
半潜式平台的水动力性能主要包括阻力、抗风性能、抗浪性能等。
阻力是指平台在水中行进时所受到的水动力阻力,它直接影响着平台的运动性能和能耗。
研究者通过数值模拟和实验测试等方法对半潜式平台的阻力进行了研究。
抗风性能是指平台在强风环境下的稳定性和可控性,研究者通过风洞试验和数值模拟等方法对半潜式平台的抗风性能进行了研究。
抗浪性能是指平台在大浪环境下的稳定性和可控性,研究者通过波浪水槽试验和数值模拟等方法对半潜式平台的抗浪性能进行了研究。
半潜式平台的运动响应主要包括姿态、运动幅度和加速度等。
姿态是指平台在水中的倾斜角度和旋转角度,它直接影响着平台的稳定性和操作性。
研究者通过数值模拟和实验测试等方法对半潜式平台的姿态进行了研究。
运动幅度是指平台在水中的运动范围,研究者通过实验测试和数值模拟等方法对半潜式平台的运动幅度进行了研究。
加速度是指平台在水中的加速度变化,研究者通过实验测试和数值模拟等方法对半潜式平台的加速度进行了研究。
综合研究表明,半潜式平台具有较好的水动力性能和运动响应特性。
在正常海况下,半潜式平台的阻力较小,抗风性能和抗浪性能较好,能够保证平台的稳定性和可靠性。
在恶劣海况下,半潜式平台的姿态、运动幅度和加速度较大,需要通过设计合理的控制系统和结构参数以保证平台的安全性和可操作性。
然而,目前对半潜式平台水动力性能及运动响应的研究仍然存在一些问题和挑战。
首先,传统的数值模拟方法和实验测试方法存在一定的误差和局限性,需要进一步改进和完善。
其次,半潜式平台的运动响应对于不同的环境条件和操作要求有很大的差异,需要进一步研究和优化。
半潜式平台水动力性能及运动响应研究综述

半潜式平台水动力性能及运动响应研究综述近年来,随着经济的发展以及技术的进步,半潜式平台研究的重点从传统的船舶整体水动力属性转向了单元水动力属性,半潜式平台水动力性能及运动响应成为研究的重点。
而且,把半潜式平台的水动力特性从水下运动中理解,并且将其应用于水下航行技术、潜水器性能改造,对潜水船设计有重要的意义。
本文就汇总了半潜式平台水动力性能及运动响应方面的研究,分析了不同方面及其研究动态,分析了不同研究机构提出的方案,为今后半潜式平台水动力性能及运动响应的研究和应用提供了参考。
研究表明,半潜式平台的水动力特性是复杂的,主要由水深、流速、船体形状、推进系统及圆柱形表面等因素共同决定。
良好的水动力性能可以保证平台有良好的航行性能,使其具有良好的运动稳定性和抗冲击性,而运动响应反应则直接反映了半潜式平台在水下运动中的稳定性,其研究对于半潜式平台的设计及其航行性能,以及其结构物的应用等非常重要。
半潜式平台的水动力性能及运动响应研究可以大致分为两种:一种是在实际工程中,通过实验研究确定半潜式平台的水动力性能及运动响应;另一种是利用数值模拟及实验验证的方法,研究半潜式平台的水动力性能及运动响应规律。
实验研究方面,主要是通过船模实验来获取半潜式平台的运动响应特性,研究其稳定性及抗荷性,分析平台水动力特性对其运动响应的影响。
此外,船模相对更有效的水动力模型也有研究,其中,低尾流流体动力学模型在船舶实验研究中有很好的应用。
在数值模拟方面,主要应用计算流体动力学(CFD)模拟,可以实现对平台水动力及运动响应的宏观及理论预测。
CFD的仿真可以实现对平台运动性能的计算预测,为潜水器设计及长距离潜行等航行技术抛出了重要的线索,也可以针对海洋环境水动力特性,实现潜水器性能改造等方面的实验研究。
以上研究均表明半潜式平台水动力性能及运动响应的研究是今后的重点,实验研究以及数值模拟是必不可少的,而且必须结合起来,把实验研究和数值模拟结合起来,才能更好的揭示半潜式平台的水动力性能及运动响应特性,将其应用到实际的航行技术体系中,实现更好的服务效果。
半潜式平台的水动力及系泊系统性能研究

半潜式平台的水动力及系泊系统性能研究海洋能源、矿产等资源的大力勘探和开采促使了海洋工程领域的蓬勃发展,而半潜式平台以其抗风浪能力强、适应水深范围广、装载量大等优点,成为了海洋资源勘探开发的主流工具之一。
因此,对半潜式海洋平台进行水动力性能分析,计算平台在风浪流联合作用时的运动响应和系泊系统的张力响应,是尤为重要的。
本文以南海300米水深的某半潜式平台为对象进行水动力分析和系泊系统性能研究,在此基础上探讨了半潜式平台运动响应的影响因素。
论文的主要内容包括以下几个方面:1.在三维势流理论的基础上,利用ANSYS-AQWA软件,建立半潜式平台的水动力模型,计算分析平台的水动力性能,获得了附加质量、阻尼系数、运动响应幅值算子和波浪力等水动力参数。
2.根据作业水深和半潜式平台的特点,将平台的系泊系统初步设计为8根对称布置的悬链线式系泊系统。
再利用前章节计算的频域水动力结果,对半潜式平台和系泊系统在生存载况、作业载况,以及风浪流联合作用下进行时域耦合动力分析,计算了平台的响应历时曲线和系泊线的张力变化曲线。
3.进行模型试验验证研究,在频域和时域计算分析中各选取了一种典型工况,结合模型试验结果进行验证分析。
分析表明,在规则波中仿真计算和模型试验结果吻合度很高。
在复杂工况的时域分析中,虽然二者之间存在一定的误差,但依旧能较准确的预报出平台的运动响应和系泊性能。
因此,利用AQWA仿真计算平台的水动力性能具有可靠性和实用性。
4.在上述研究的基础上,通过数值计算分析的方法,探讨了半潜式平台运动响应的影响因素。
计算模型仍旧为原半潜式平台,分别计算了不同重心高度、吃水深度和是否带有垂荡板对平台运动响应的变化规律,为今后半潜式平台的优化设计提供一定的参考。
本文的研究内容对于使用AQWA仿真和模型试验来研究半潜式平台的水动力问题有一定的借鉴作用;同时,本文探讨的半潜式平台运动响应的影响因素,所得到结果对于半潜式平台的设计和结构优化具有一定的意义。
浅谈半潜式钻井平台锚泊辅助动力定位

浅谈半潜式钻井平台锚泊辅助动力定位摘要:本文主要对半潜式钻井平台锚泊辅助动力定位进一步分析。
半潜式钻井平台作为深海油气开采的重要装备,其定位的安全性、可靠性和经济性非常重要。
关键词:半潜式;钻井平台;锚泊辅助动力定位引言:随着海洋油气资源开采逐渐向深海迈进,人们对深海油气开采大型设备的定位研究也越来越重视。
锚泊定位受到水深的限制,成本增加,抛锚困难,定位不精确;动力定位虽然不受水深的影响,但巨大的燃料消耗大大增加了成本。
锚泊辅助动力定位结合了二者的优势,不仅能够精确定位,而且减小了燃料消耗,减低了成本。
一、半潜式钻井平台的简述半潜式钻井平台,又称立柱稳定式钻井平台。
大部分浮体没于水面下的一种小水线面的移动式钻井平台,是从坐底式钻井平台演变而来的。
半潜式钻井平台是一种浮动型的大部分浮体在水面以下的移动式平台,在未来的深海油气资源开采中是非常重要的作业装备。
它主要由甲板、立柱、下浮体和浮箱及一些连接下浮体与下浮体、立柱与平台、立柱与立柱的支撑组成。
半潜式钻井平台的上部平台一直处于海面以上的一定高度,下浮体在航行状态时浮在海面上,由浮体的浮力支撑,在作业时,下浮体会潜入海面以下,避免海面上强烈的风浪作用。
由于半潜式钻井平台在波浪上的运动响应较小,在几种钻井平台中得到很大发展,在海洋工程中,不仅可用于钻井,其他如生产平台、铺管船,供应船、海上起重船等都可采用。
随着海洋开发逐渐由浅水向深水发展,这类平台的应用,将会日渐增多,诸如油与气的贮存,离岸较远的海上工厂,海上电站等都将是半潜式平台的发展领域。
二、锚泊辅助动力定位系统简述1. 锚泊定位系统锚泊系统是依靠锚链的张力提供的反力来抵抗外界风、浪、流等环境力,从而将海洋平台保持在预定的工作水域内。
锚泊系统主要包括位置检测系统、液压式锚机、控制系统。
锚泊系统的种类非常多,根据系泊点位置和数量可分为单点系泊和多点系泊两种方式。
目前,半潜式钻井平台的锚泊系统主要采用的是多点系泊方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l 引言
半 潜 式平 台深 水锚泊 系统一般 由多根 锚泊 线组 成 , 到平 台 运动 、 洋 环境 载 荷 、 泊 线 与海 底 接 触 等 受 海 锚
因素 的影 响 , 动力 计算 分析 较复 杂 。随着 海 洋工程 的 不断发 展 , 其 深水 锚泊 系统 发展 为 由多 成分 锚泊 线组 成
的多 点 系泊 系统 。文献 [ ] 基 于时域 采用 有 限元方 法解 决 了二 维对称 布 置锚泊 线 的动 力分 析 , 分 析考 虑 1在 该
了风 浪流 外载 荷 的作用 、 锚泊 线 与海底 的摩 擦 、 台的运 动 对锚 泊 系 统 的影 响 , 平 以及 多成 分 锚泊 线 对 系泊 系
量( 力、 力、 张 重 流体动 力及 海底 对其 的作 用 力) 。流 体 动力 由波 浪 和水流 的水 分子 的运 动及 节点 的运 动
引起 。利用 相 应 的运 动概 念 及 Morsn公 式 可 求 rio
解锚 泊 线 的流体 动力 。锚 泊线 的计 算参 数见 表 。 采 用 So e 五 阶波 浪理 论计 算锚 泊 系统 的 动力 , tk s 波浪 参 数 取 GOM1 0年计 算 标 准 , 即波 高 9 1 4 周 . 4 m,
余 龙 王 娟 ,
( .上 海 交通 大学 , 海 2 0 3 ; .长 江船 舶 设计 院 , 1 上 00 02 武汉 4 0 6 ) 3 0 2
摘 要 : 二 维求 解 锚 泊 线 的动 力 分析 基 础 上 , 立锚 泊 系 统 的 三 维 有 限 元 模 型 , 在 时 域 在 建 并
内进 行 动 力 计 算 , 结果 与二 维计 算进 行 比 较 , 明该 方 法 能 解 决二 维 到 三 维 的 过 渡 , 果 可信 。 证 结
关 键 词 : 力 ; 泊 系统 ; 动 锚 时域 ; 维 有 限 元 模 型 三 中图分类号 : U6 1 6 文献标识码 : A
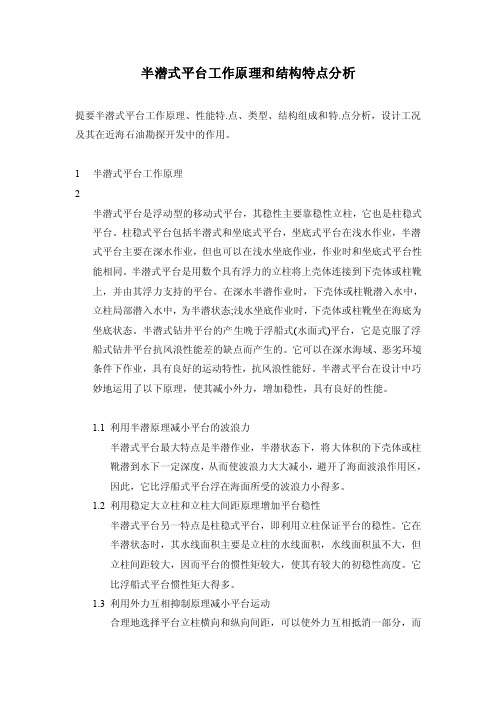
() 4根 锚 泊 线 对 称 布 置 a
( ) 8根 锚 泊 线 对 称 布 置 b
图 2 锚 泊 系统 布置 图
收 稿 日期 :0 70 — 3 2 0 — 71 作者 简 介 : 余龙 ( 9 6) 男 , 士 , 师 。 主要 从 事 海 洋 新 技 术 与 装备 研 究 。 17 一 , 博 讲
维普资讯
・
3 ・ 4
余龙 等
半 潜式 平 台 深 水 锚 泊 系 统 三 维 时 域 动 力 分析
20 年 l 07 2月
文 章 编 号 :0 1 5 0 2 0 ) 6 0 3 —0 1 0 —4 0 ( 0 7 0 - 0 4 4
半 潜 式 平 台 深 水 锚 泊 系 统 三 维 时域 动 力分 析
维普资讯
第 2 2卷
第 6期
中 国
海
洋
平
台
・ 35 ・
2 2 系统 参 数 . 由于深水 锚泊线 的柔性 特征 , 当研 究锚 泊线 的运 动 时 , 用 非线 性 偏 微分 方 程 组 来求 解 , 定 锚 泊线 的 采 确
形态 及其 沿锚 泊线 各点 的运 动和 张力 。采 用悬 挂重 力 的集 中质量 方法 来 模 拟锚 泊 系 统 , 根锚 泊 线 分别 由 每
偶 数 , 持整 个 系统对 称 。锚泊 线 的长度 相 同情况 下 , 保 在这 里 考虑 锚 泊 系统 的两 种 布置 形 式 , 种 为 4根 锚 一
泊 线对 称布 置 , 水平 夹角 为 2 . 0图 2 a ) 另 一 种 为 8根 锚 泊 线 对称 布 置 , 与 2 5( () , 同一 着链 点之 间锚泊 线 夹 角 为 2 . 图 2 b ) 2 5( o ( ) 。图中浪 和 流方 向沿 X 型 如 图 1 计 算对 象 为南海 2号平 台 , 定浪 和 流 的作 用 方 向一 致 ( , 假 X正 向) 。由 于深
水 工作 的平 台尺 度与锚 泊 系统 的锚 泊线 长度 相 比是个 小量 , 以在 导缆孔 处将 平 台简 化为 一个 质点 。 所 半潜 式平 台工作水 深 为 1 7 m, 台的系泊 系统 一般 都 是 多点 系泊 , 31 平 系泊 点 多 于两 个 , 泊 线 的根 数 为 锚
统 的影 响 。然 而 , 于整 个锚 泊 系统 是 由多根 锚泊线 组 成 的 , 对 二维 模 型并不 能完 全模 拟 三维 空 间的锚 泊线 变
形, 目前 的三维 分析 的方 法 大多基 于频 域 , 采用 摄动 展开 求解 联立 方程[ 。本 文提 出一种在 三 维空 间求 解 锚 3 3 泊 系统 的动力 分析 方法 , 直接 在 时域 内求解 环 境载 荷 、 泊线 的非 线性 方程 , 方法 可 以考虑 平 台运动 、 根 锚 该 多
锚泊 线 变形 的空 间影 响 、 海底 摩 擦 的影 响 以及 多 成 份 锚 泊线
的影 响 , 求解 效率 较 高 。 且
2 三 维 锚 泊 线 计 算 模 型 的 建 立
2 1 分 析模 型 .
为研 究方 便 , 建立 浪 和流 作 用 下 的 对称 式 布 置 的 锚 泊 系
图 1 坐标系示意图
期 1 . s流 速 0 9 6 s 36 , . 2 m/ 。 考虑平 台在波 浪 中的运 动影 响 , 定此 时 的锚泊 系 统受 力 和导 缆 孔处 的位 移 。平 台的运 动 在 导 缆孔 处 假 施加 , 虑平 台 的两 个方 向运 动 , 考 一是 垂 向的运 动 , 向为 Z轴 正 向 , 人 平 台浮 力 , 方 计 另一 个 是水 平 方 向的运
很 多个不 连续 的单 元组 成 , 下式 为其 控制 方程 : [ £] 一 F () A +。 () X Jf () 1
表 锚 泊 线 参 数
式 中 : 为惯 性矩 阵 ; 为 与时 间有 关 的 附加 惯性 A, a 矩 阵 ; 为 总 的加 速度 矢量 ; ,f 艾, F ()为节点 上 力 的矢