Classical control theory 经典控制理论 精美英文PPT
控制理论(Control Theory)

自我控制理论:恰当的训练使人获得抑制天然 冲动的能力而守法
未经历上述改变者就发展为犯罪人 这类理论又被称为“社会结合失败理论” (Failing to Bond)
6
1
控制理论的基本观点
• 犯罪的意志与能力是人之天性,无需解释 • 罪犯不过是那些维持其自然状态的个体 • 守法的意志与能力就是对人之天性的控制意志与能力 • 守法者不论在内因与外因方面都发生了关键性改变,这些
这类理论又被称为“问题性社会结合理论” (Problematic Bonding)
4
《金刚》:原初状态的人类犹如金刚,欲求强烈, 百无禁忌,自我中心,不加以约束的话极具破坏
力 5
性恶论与守法行为归因
这一理论倾向相信人性本恶
人类天性的主要成分为“恶魔”:自私,贪婪, 暴力,缺乏自我控制
• 在现实中,低程度的自我控制和对犯罪行为的倾向很可能 就是同一个东西。换句话说此理论有同义反复和循环论证 的逻辑谬误 (Akers,1991)。
17
控制理论的心理学解读
18
3
2014/12/20
低自我控制的实质是什么?
6个:
(1) 冲动性 (impulsivity):倾向于对当前环境做出直接反应而不追求延迟的 满足,不擅考虑行为之长期后果(认知能力要素)
• 具体运算阶段(7-12岁):儿童已经有了成人逻辑思维能 力的萌芽;逻辑思维涉及实际的物体而非抽象的观念。 有了“去中心化” 的能力,儿童的道德判断变得二维 和主观了。
• 形式运算阶段(12岁至成人):认知成熟,能进行抽象和 逆向的思考。
21
Lawrence Kohlberg的道德发展理论
自适应控制的基本概念

2. 自适应控制提出 当不确定因素难以事先预知,又要设计满 意的控制系统,由此提出自适应控制思想。 自适应调节器就是期望修正自己的特性以 补偿过程和扰动的动力学变化。
四、自适应控制思想雏形
观测 运行指标 系统参数 再认识 系统 (不确定) 决策修正 控制器参数 控制器结构 控制作用
性能指标
2. 模型参考自适应控制系统 a. 线性模型跟随系统
参考模型给出 了期望闭环响 应特性
参考模型
es Gm 1 GcG p GcG p u s 1 GcG p G p G f
y p s GcG p GmG p G f u s 1 GcG p G p G f
二、控制问题的几种情况
1. 无扰动,系统模型确定
系统模型
属于确定性控制 可以采用开环控制 2. 有扰动,系统模型确定 属于随机控制 当扰动不确定采用闭环控制 扰动确定可以采用补偿控制 3. 可能有扰动,系统模型不确定
采用闭环控制? 扰动√ 系统模型不确定×
扰动
系统模型
扰动
系统模型
ym
模型跟随 调节器
e
yp
+
u
-
控制器
+
-
被控对象
已知被控对象的数学模型√ 未知被控对象的数学模型或变化×
b. 模型参考自适应控制系统
参考模型
+
-
e
u
- -
前馈调节器
被控对象
反馈调节器
参数调整 信号综合
自适应机构
美国Minorsky研制船舶驾驶伺服结构,提出PID控制(1922)
美国MIT的Vannevar Bush研制成大型模拟计算机 (1928)
自动控制原理专业词汇中英文对照

自动控制原理专业词汇中英文对照中文 英文自动控制 automatic control;cybernation 自动控制系统 automatic control system自动控制理论 automatic control theory经典控制理论 classical control theory现代控制理论 modern control theory智能控制理论 intelligent control theory 开环控制 open-loop control闭环控制 closed-loop control输入量 input输出量 output给定环节 given unit/element比较环节 comparing unit/element放大环节 amplifying unit/element执行环节 actuating unit/element控制环节 controlling unit/element被控对象 (controlled) plant反馈环节 feedback unit/element控制器 controller扰动/干扰 perturbance/disturbance前向通道 forward channel反馈通道 feedback channel 恒值控制系统 constant control system随动控制系统 servo/drive control system 程序控制系统 programmed control system 连续控制系统 continuous control system离散控制系统 discrete control system线性控制系统 linear control system非线性控制系统 nonlinear control system定常/时不变控制系统 time-invariant control system 时变控制系统 time-variant control system 稳定性 stability快速性 rapidity准确性 accuracy数学模型 mathematical model微分方程 differential equation非线性特性 nonlinear characteristic线性化处理 linearization processing泰勒级数 Taylor series传递函数 transfer function比例环节 proportional element积分环节 integrating element一阶惯性环节 first order inertial element二阶惯性环节 second order inertial element二阶震荡环节 second order oscillation element 微分环节 differentiation element一阶微分环节 first order differentiation element二阶微分环节 second order differentiation element 延迟环节 delay element动态结构图 dynamic structure block串联环节 serial unit并联环节 parallel unit信号流图 signal flow graph梅逊增益公式 Mason’s gain formula时域分析法 time domain analysis method性能指标 performance index阶跃函数 step function斜坡函数 ramp function抛物线函数 parabolic function /acceleration function 冲击函数 impulse function正弦函数 sinusoidal function动态/暂态响应 transient response静态/稳态响应 steady-state response 延迟时间 delay time上升时间 rise time峰值时间 peak time调节时间 settling time最大超调量 maximum overshoot稳态误差 steady-state error无阻尼 undamping欠阻尼 underdamping过阻尼 overdamping特征根 eigen root极点 pole零点 zero实轴 real axis虚轴 imaginary axis 稳态/静态分量 steady-state component瞬态/暂态/动态分量 transient component 运动模态 motion mode衰减 attenuation系数 coefficient初相角 initial phase angle响应曲线 response curve主导极点 dominant pole 劳斯稳定判据 Routh stability criterion S平面 S plane胡尔维茨稳定判据 Hurwitz stability criterion 测量误差 measurement error扰动误差 agitation error结构性误差 structural error偏差 deviation根轨迹 root locus 常规根轨迹 routine root locus根轨迹方程 root locus equation 幅值 magnitude幅角 argument对称性 symmetry分离点 separation/break away point会合点 meeting/break-in point渐近线 asymptote出射角 emergence angle/angle of departure入射角 incidence angle/angle of arrival 广义根轨迹 generalized root locus零度根轨迹 zero degree root locus 偶极子 dipole/zero-pole pair 频域分析法 frequency-domain analysis method 频率特性 frequency characteristic极坐标系 polar coordinate system直角坐标系 rectangular coordinate system幅频特性 magnitude-frequency characteristic相频特性 phase-frequency characteristic 幅相频率特性 magnitude-phase frequency characteristic 最小相位系统 minimum phase system非最小相位系统 nonminimum phase system奈奎斯特稳定判据 Nyquist stability criterion 伯德定理 Bode theorem稳定裕度 stability margin幅值裕度 magnitude margin 相位/相角裕度 phase margin对数幅频特性 log magnitude-frequency characteristic 无阻尼自然震荡角频率 undamped oscillation angular frequency 阻尼震荡角频率 damped oscillation angular frequency 阻尼角 damping angle带宽频率 bandwidth frequency 穿越/截止频率 crossover/cutoff frequency 谐振峰值 resonance peak系统校正 system compensation超前校正 lead compensation滞后校正 lag compensation自激震荡 self-excited oscillation死区特性 dead zone characteristic饱和特性 saturation characteristic间隙特性 backlash characteristic描述函数法 describing function method相平面法 phase plane method 采样控制系统 sampling control system数字控制系统 digital control system频谱 frequency spectrum 采样定理 sampling theorem信号重现 signal recurrence拉氏变换 Laplace transformZ变换 Z transform终值定理 final-value theorem差分方程 difference equation迭代法 iterative method 脉冲传递函数 pulse transfer function零阶保持器 zero-order holder映射 mapping方框图 block diagram伯德图 Bode diagram特征方程 characteristic equation可控性 controllability临界阻尼 critical damping阻尼常数 damping constant阻尼比 damping ratio初始状态 initial state初值定理 initial-value theorem反Z变换 inverse Z-transformation负反馈 negative feedback正反馈 positive feedback 尼科尔斯图 Nichols chart部分分式展开 partial fraction expansion 幅角原理 argument principle相对稳定性 relative stability共振频率 resonant frequency劳斯表 Routh tabulation/array奇点 singularity渐进稳定性 asymptotic stability控制精度 control accuracy临界稳定性 critical stability耦合 coupling解耦 decoupling比例积分微分调节器 proportional integral derivative regulator(PID) 串联校正 series/cascade compensation 单输入单输出 single input single output(SISO)多输入多输出 multi input multi output(MIMO)低通滤波器 low pass filter非线性系统 nonlinear system复合控制 compound control衰减振荡 damped oscillation主反馈 monitoring feedback 转折(交接)频率 break frequency稳定焦点/节点 stable focus/node。
现代控制理论 英文PPT1

Control Theory History
1769 James Watt’s steam engine and governor-Flying Ball; governor1875, 1895, Routh and Hurwitz developed stability analysis criterion; 1932, Nyquist developed a method for system stability analysis; 1948, Norbert Wiener-《Cybernetics》; Wiener- Cybernetics》 1979 State-variable model and optimal control developed State1980 Robust control system design widely studied 1990 Reliable robust control system demanded in manufacturing 1997 Martian surface explorer-Sojourner(探路者号) explorer-Sojourner(探路者号 探路者号) ……………… Military and economy requirements push technology going forward.
Course Requirement
Course Goals
• This course focuses on linear system theory of the conventional approaches of state-space equations and the statepolynomial fraction method of transfer matrices. • The course deals with state-space representations and statesolutions, matrix polynomial fractions, minimal realizations, Lyapunov stability, controllability and observability, feedback, pole placement, observers. • Upon completing of this course, you should be able to have a better understanding of the basic concepts and analysis methods for linear multivariable control systems, and firm grasp of design methods for linear time-invariant systems. time-
控制理论术语中英文对照表
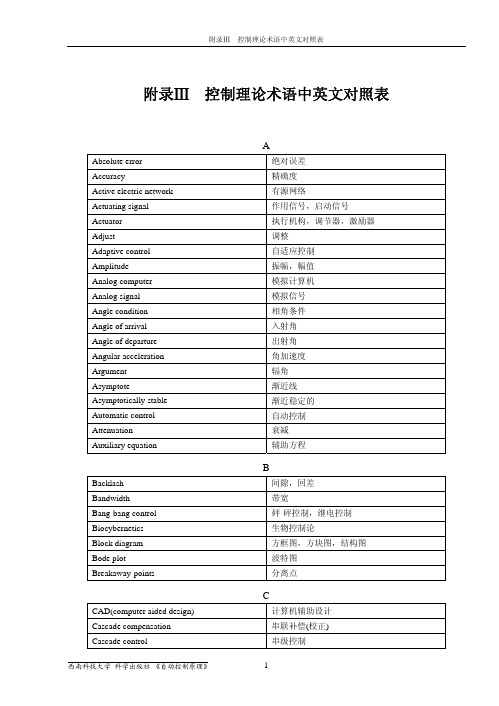
附录Ⅲ 控制理论术语中英文对照表AAbsolute error 绝对误差Accuracy 精确度Active electric network 有源网络Actuating signal 作用信号,启动信号Actuator 执行机构,调节器,激励器Adjust 调整Adaptive control 自适应控制Amplitude 振幅,幅值Analog computer 模拟计算机Analog signal 模拟信号Angle condition 相角条件Angle of arrival 入射角Angle of departure 出射角Angular acceleration 角加速度Argument 辐角Asymptote 渐近线Asymptotically stable 渐近稳定的Automatic control 自动控制Attenuation 衰减Auxiliary equation 辅助方程BBacklash 间隙,回差Bandwidth 带宽Bang-bang control 砰-砰控制,继电控制Biocybernetics 生物控制论Block diagram 方框图,方块图,结构图Bode plot 波特图Breakaway-points 分离点CCAD(computer aided design) 计算机辅助设计Cascade compensation 串联补偿(校正)Cascade control 串级控制Channel 通道Characteristic equation 特征方程Classical control theory 古典控制理论Closed loop control system 闭环控制系统Closed loop frequency response 闭环频率响应Closed loop pole 闭环极点Closed loop zero 闭环零点Combinational control system 复合控制系统Comparator 比较器Comparing element 比较元件,比较环节Compound control 复合控制Compensation 补偿,校正Complex plane 复平面Conditional stability 条件稳定Configuration 结构,配置,方案,组态Constant M loci 等M圆Continuous system 连续系统Controlled variable 被控变量Control system 控制系统Control valve 调节阀Controllability 可控性,能控性Corner frequency 转折频率,交接频率Correcting unit 校正器Correction 校正Coupling 耦合Criterion 判据,准则Critical damping 临界阻尼Cut-off frequency 截止频率Cybernetics 控制论DDamped natural frequency 有阻尼自然频率Damper 阻尼器Damping factor 阻尼系数Damping ratio 阻尼比Dead band 死区Dead time 纯延迟,延迟时间Decomposition 分解Delay 滞后Delay element 滞后环节Derivation action 微分作用Derivative control 微分控制Desired value 预期值,期望值Deviation 偏差Differencing junction 比较点Differential equations 微分方程Digital computer 数字计算机Discrete-data system 离散数据系统Disturbance 扰动,干扰Dominant pole 主导极点Duality 对偶性Dynamic equation 动态方程Dynamic error 动态误差Dynamic process 动态过程EEquilibrium state 平衡状态Eigenvalue 特征值Eigenvector 特征向量Error 误差Error coefficient 误差系数Error signal 误差信号Even symmetry 偶对称Exponential 指数,指数的,幂的Extremum 极值FFeedback 反馈Feedback control 反馈控制Feedback element 反馈环节Feedback path 反馈通道Feedforward 前馈Final value 终值First-order system 一阶系统Forward path 前向通道Frequency 频率Frequency domain 频域Frequency response 频率响应Frequency response characteristic 频率响应特性GGain 增益Gain margin 增益裕度,幅值裕度HHarmonic response 谐波响应Holder 保持器Homogeneous equation 齐次方程Hurwitz determinant 赫尔维茨行列式Hysteresis error 回差IIdealized system 理想化系统Identification 辨识Impulse response 脉冲响应Inertial 惯性的,惯量的,惰性的Inherent characteristic 固有特性Initial condition 初始条件Initial state 初始状态Initial value theorem 初值定理Inner loop 内环Input 输入Input node 输入节点Input signal 输入信号Integral action 积分作用Integral control 积分控制Internal description 内部描述Inverse matrix 逆矩阵Inverse transformation 反变换Inverse Laplace transforms 拉普拉斯反变换Isocline method 等倾线法Iterative algorithm 迭代算法JJordan block 约当块Jordan canonical form 约当标准型KKalman criterion 卡尔曼准则Kalman filter 卡尔曼滤波器LLag network 滞后网络Lag compensation 滞后补偿Laplace transforms 拉普拉斯变换Large scale system 大系统Lead network 超前网络Limit cycle 极限环Linearization 线性化Linearity 线性度Linear equation 线性方程Linear system 线性系统Load-response curve 负荷响应曲线Locus 轨迹Log magnitude 对数幅值Low pass characteristic 低通特性MMagnitude condition 幅值条件Magnitude-Versus-Phase plot 幅值特性曲线Manipulated variable 操纵变量Mason rule 梅森公式Mathematical model 数学模型Matrix 矩阵Maximum overshoot 最大超调量Measurable 可测量的Measured variable 被测变量Minimum phase system 最小相位系统Model decomposition 模型分解Modulus 模Moment of inertia 转动惯量Multinomial 多项式(的)Multivariable system 多变量系统NNatural frequency 自然频率Negative feedback 负反馈Nichols chart 尼柯尔斯图线Node 节点Noise 噪声Nonlinear control system 非线性控制系统Nonminimum phase system 非最小相位系统Nonsingular 非奇异的Norm 范数Numerical control 数字控制Nyquist criterion 奈奎斯特判据Nyquist contour 奈奎斯特轨线OObjective function 目标函数Observability 可观性,能观性Observer 观测器Odd symmetry 奇对称Offset 偏移,位移Open loop 开环Optimal control 最优控制Optimization 最优化Origin 原点Oscillation 振荡Oscillatory response 振荡响应Outer loop 外环Output 输出Output signal 输出信号Over damping 过阻尼Overshoot 超调量PParameter 参数Peak overshoot 超调峰值Peak time 峰值时间Performance index 性能指标Phase lag 相位滞后Phase lead 相位超前Phase margin 相角裕度Phase plane 相平面Pickoff point 引出点PID(proportional plus integral plus derivative) PID(比例、积分、微分)控制器Piece-wise linearization 分段线性化Pole 极点Pole assignment 极点配置Polynomial 多项式Position error 位置误差Positive definiteness 正定性Pre-compensator 预补偿器Process control 过程控制Proportional band 比例带Proportional control 比例控制Pulse 脉冲Pulse width 脉宽Pure delay 纯滞后RRamp input 斜坡输入Ramp response 斜坡响应Rate feedback 速度反馈Rate time 微分时间,预调时间Rational 有理(数)的,合理的Realization 实现Reference variable 参考变量Regulator 调节器Relative stability 相对稳定Reliability 可靠性Response 响应Reset time 再调时间,积分时间Residue 留数Rise time 上升时间Roots loci 根轨迹Routh-Hurwitz criterion 劳斯-赫尔维茨判据Routh stability criterion 劳斯稳定判据SSampling control 采样控制Sampling freqency 采样频率Sampling period 采样周期Series compensation 串联补偿Servo 伺服机构,伺服电机Servodrive 伺服传动,伺服转动装置Set value 设定值Settling time 调节时间,稳定时间Signal flow graph 信号流图Singular point 奇点Stability 稳定(性)Stability margin 稳定裕度State equations 状态方程State space 状态空间State variables 状态变量Steady-state 稳态的Stationary 稳态Steady-state deviation 稳态偏差Steady-state error 稳态误差Step singal 阶跃信号Step response 阶跃响应Stochastic process 随机过程Summing junction 相加点Superposition 叠加Systematic deviation 系统偏差System identification 系统辨识TTangent 切线Threshold value 阈值Time constant 时间常数Time domain 时域Time response 时间响应Time-invariant system 常定(时不变)系统Time-varying system 时变系统Trajectory 轨迹Transducer 传感器,变换器Transfer function 传递函数Transfer matrix 转移矩阵Transient response 暂态响应Transmitter 变送器Transportation lag 传输滞后UUndamped natural frequency 无阻尼自然频率Underdamping 欠阻尼Uniform stability 一致稳定Unit circle 单位圆Unit impulse 单位脉冲Unit step function 单位阶跃函数Unity feedback 单位反馈Unity matrix 单位矩阵Unstable 不稳定的Asymmetrical 不对称的VValue of quantity 量值variable 变量Vector 向量Velocity feedback 速度反馈WWaveform 波形Weighting function 加权函数White noise 白噪声ZZero 零点Zero input response 零点输入响应Zero-order holder 零阶保持器Zero-state response 零状态响应Z-transfer function Z传递函数Z-transformation Z变换。
现代控制理论第一章 ppt课件
1889-1976
1.1 控制理论的发展历程
伯德,Hendrik Wade Bode
美国1905-1982
Bode was an American engineer, researcher, inventor, author and scientist,
of Dutch ancestry.
As a pioneer of modern control theory and electronic
telecommunications he revolutionized both the content and methodology of his chosen fields of research.
1.1 控制理论的发展历程
维纳,Norbert Wienner
1948年,维纳发表《控制论》,宣告了这门新兴学 科的诞生。这是他长期艰苦努力并与生理学家罗森 勃吕特等人多方面合作的伟大科学成果。
1964年1月,他由于“在纯粹数学和应用数学方面并 且勇于深入到工程和生物科学中去的多种令人惊异的 贡献及在这些领域中具有深远意义的开创性工作”荣 获美国总统授予的国家科学勋章。
1.1 控制理论的发展历程
维纳,Norbert Wienner
第一章,牛顿时间和柏格森时间 第二章,群和统计力学 第三章,时间序列、信息与通讯 第四章,反馈与振荡 第五章,计算机与神经系统 第六章,完形与普遍观念 第七章,控制论和精神病理学 第八章,信息、语言和社会 第九章,关于学习和自生殖机 第十章,脑电波与自行组织系统
1.1 控制理论的发展历程
伯德,Hendrik Wade Bode
自动控制的发展

18
四、萌芽阶段(1705年-1872年)
1788年,英国James Watt用离心式调 速器控制蒸汽机的速度.
19
四、萌芽阶段(1705年-1872年)
1868年,James Clerk Maxwell On Governors Proceedings of the Royal Society of London Vol. 16, pp. 270-283
35
五、经典控制(1872年-1950年)
1948年,在贝尔实验室工作的C. Shannon 发表专著《The Mathematical Theory of Communication》。
36
五、经典控制(1872年-1950年)
1954年,我国科学家钱学森完成了专著《工程
控制论》(Engineering Cybernetics)。
五、经典控制(1872年-1950年)
Walter R. Evans
1948年, Graphical analysis of control systems Vol.67,pp.547-551. 1950年, Control system synthesis by root locus method Vol. 69,pp. 66–69. 时域、频域、根轨迹经典控制理论中三分天下!
代表作: Routh-Hurwitz判据 数字控制系统 Lyapunov定理 伺服机构理论 Nyquist-米哈伊洛夫判据 火炮控制器 Bode图 气压反馈控制器 根轨迹法 汽车装配流水线 负反馈放大器 《控制论》 PID控制方法 《工程控制论》 PID参数的最佳调整法 《通信的数字理论》 代表人物: Routh, Hurwitz, W.Evans, Lyapunov,钱学森, H.S.Black, H.Bode, Nyquist, N.Wiener, H.Hazen, C.Shannon, etc.
控制理论(Control Theory)
自我控制理论
• 人们的服从性是通过家长的有 效的对行为的自我控制的教养 中建立的
• 其它的社会机构,诸如学校, 教堂,或者社区也有教育的功 能。但是他们的这种功能没有 家长的教养作用这么有效。
• 家长对儿童自我控制培养的重 要性不是基于所谓“血缘”或 “生理”原因,而是为儿童成 长环境的社会化设定所决定: – 儿童接受自我控制训练的最关 键时期正好是家长对儿童影响 最集中地时期
23
Kohlberg围绕这个故事提出了一系列问题,让儿童讨论,以此 来研究儿童道德判断所依据的准则及其道德发展水平。
1、汉斯应该偷药吗?为什么? 2、他偷药是对的还是错的?为什么? 3、汉斯有责任或义务去偷药吗?为什么? 4、人们竭尽所能去挽救另一个人的生命是不是很重要?为什么? 5、汉斯偷药是违法的。他偷药在道义上是否错误? 为什么? 6、仔细回想故事中的困境,你认为汉斯最负责任的行为应该是做什
这类理论又被称为“问题性社会结合理论” (Problematic Bonding)
4
《金刚》:原初状态的人类犹如金刚,欲求强烈, 百无禁忌,自我中心,不加以约束的话极具破坏
力 5
性恶论与守法行为归因
这一理论倾向相信人性本恶
人类天性的主要成分为“恶魔”:自私,贪婪, 暴力,缺乏自我控制
如果妻子一直对他不 好,他就没有必要自 寻烦恼,冒险偷药
做贼会使自己的家庭 名声扫地,给自己的 家人(包括妻子)带 来麻烦和耻辱
采取非常措施救妻子 的命合情合理,但偷 别人的东西犯法。
丈夫没有偷药救妻子 的义务,这不是正常 的夫妻关系契约的组 成部分。他已经为救 妻子命尽了全力,无 论如何都不该采取偷 的办法解决问题,但 他还是去偷药了,这 是一种超出职责之外 的好行为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Thank you !
By group six
In1932, American physicist Nyquist (H. Nyquist)
proposed the frequency response method. (频率 响应法)
By group six
The development of classical control theory
By group six
The root locus method
Definition
The root locus is the path of the roots of the
characteristic equation traced out in the s-plane as a system parameter (参数)is changed. Explanation The root locus is a curve of the location of the poles of a transfer function as some parameter (generally the gain K) is varied. The number of zeros does not exceed the number of poles.
By group six
The root locus procedure
• Step 1:Write the characteristic equation as: • Step 2:Factor(分解) P(s),write the polynomial (多项式) in the form of poles and zeros.
k 0,1,2,n m 1
By group six
Bode Plot
A Bode plot is a graph of the transfer function of a linear, time-invariant system versus frequency, plotted with a logfrequency axis, to show the system's frequency response.
• Step 6 :Asymptotes(渐 近线) of the root loci. • 渐近线与实轴相交点的坐 m 标为: n
j
A
p z
i 1 i i 1
i
180o p3 -2 p2 -1 60o -60o p1 0
nm
• 渐近线与实轴正方向的夹 角为:
( 2k 1) A nm
• The root locus on the real axis always lies in a section of the real axis to the left of an odd number of poles and zeros.
By group six
The root locus procedure
Bode(伯德) and Nichols(尼科尔斯) proposed
the frequency- domain analysis in the field of
classical control theory.
Wiener (维纳)published “ cybernetics(控制论) on the animal and the machine control and communication science . "
By group six
j
p3
p2
z1
p1 0
p4 z3
The root locus procedure
• Step 4:Locate the segments of the real axis that are root loci. • Step 5: The root loci must be symmetrical(对 称的) with respect to the horizontal real axis.
By group six
Classical control theory
• Classical control theory is mainly used to solve the analysis and design problemsstems.
In 1868, British physicist J.C. Maxwell(麦斯威尔)
proposed algebraic stability criterion.(稳定性代 数判据)
Rolls (EJ Routh) and Hurwitz (A. Hurwitz) proposed two famous stability criterion - Routh criterion and Hurwitz criterion.(劳斯判据和胡尔维茨判据)
By group six
Bode plot
Bode magnitude plot (幅频图) • expresses the magnitude of the frequency response gain Bode phase plot (相频图) • expresses the frequency response phase shift
The famous Chinese scientist Qian Xuesen(钱学森)
applied control theory to engineering, publishing “ engineering cybernetics .“(工程控制论)
By group six
Classical control theory
The root locus procedure
• Step 3:Locate the poles and zeros of P(s) on splane with selected symbols.
z
2
(s p ) K (s z ) 0
i i i 1 i 1
n
m
• NOTICE:
m
1 KP( s) 0
K is the parameter that is variable. Example:
1
K ( s zi )
s( s 4) P( s) 2 s ( s 4) s 5
(s p )
i i 1
i 1 n
0
By group six
Translation The transfer function, root locus method and
welcome to use these PowerPoint templates, New
frequency-domain analysis are Content design, 10 years experience the primary
Introduction of classical control theory
Content
Development Root locus plot Frequency-domain analysis
By group six
The development of classical control theory
• The locus of the roots of the characteristic equation 1+KP(s)=0 begins at the poles of P(s) and end at the zeros of P(s) as K increases form 0 to infinity(无穷).
By group six
Exercise
• 系统的开环传递函数 G(s)=k/[s(T1*s+1)*(T2*s+1)] (T1>T2),画 出伯德图。
By group six
Nyquist stability criterion
• The Nyquist stability criterion is a graphical technique for determining the stability of a system. Because it only looks at the Nyquist plot of the open loop systems, it can be applied without explicitly computing the poles and zeros of either the closed-loop or openloop system.
analysis and design tools in classical control
theory. They constitute the basic framework of classical control theory.
传递函数,根轨迹和频域分析是经典控制论中重要的分析设 计工具。他们组成了经典控制论的基础框架。