《自动控制理论教学课件》第三章习题
《自动控制原理》---丁红主编---第三章习题答案
习题3-1.选择题:(1)已知单位负反馈闭环系统是稳定的,其开环传递函数为:)1(2)s )(2+++=s s s s G (,系统对单位斜坡的稳态误差是:a.0.5 b.1 3-2 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+001251253-3 一阶系统结构图如图3-45所示。
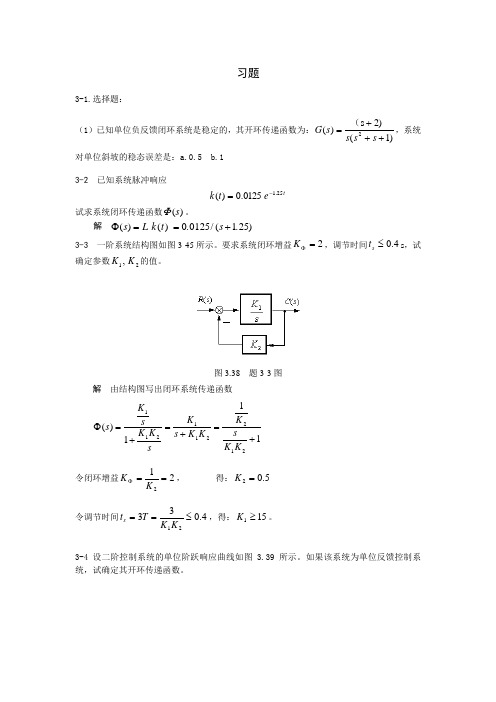
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
图3.38 题3-3图解 由结构图写出闭环系统传递函数111)(212211211+=+=+=ΦK K sK K K s K sK K s K s令闭环增益212==ΦK K , 得:5.02=K 令调节时间4.03321≤==K K T t s ,得:151≥K 。
3-4 设二阶控制系统的单位阶跃响应曲线如图 3.39 所示。
如果该系统为单位反馈控制系统,试确定其开环传递函数。
图3.39 题3-4图 解:由图2.8知,开环传递函数为3-5 设角速度指示随动统结构图如图3-40所示。
若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少?图3-40 题3-5图解:依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。
写出系统闭环传递函数Ks s Ks 101010)(2++=Φ 闭环特征多项式20022021211010)(⎪⎪⎭⎫ ⎝⎛++=⎪⎪⎭⎫ ⎝⎛+=++=T s T s T s K s s s D 比较系数有 ⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛=K T T 101102200 联立求解得 ⎩⎨⎧==5.22.00K T 因此有 159.075.40''<''==T t s3-6 图3.41所示为某控制系统结构图,是选择参数K 1和K 2,使系统的ωn =6,ξ=1.3-7 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。
自动控制理论课件自控课件(第三章)

开环控制系统适用于一些对精 度和稳定性要求不高的场合,
如简单的温度控制系统。
开环控制系统的优点是结构简 单、成本低、维护方便。
闭环控制系统
闭环控制系统是一种控制系统的类型, 其控制过程依赖于输出反馈。
闭环控制系统具有较高的控制精度和 稳定性,适用于一些对精度和稳定性 要求较高的场合,如工业自动化生产 线。
科技发展
自动控制理论是现代科技发展的 重要支撑,它推动了自动化、智 能制造等领域的发展,为科技创
新提供了源源不断的动力。
自动控制理论的历史与发展
01
历史回顾
自动控制理论的发展可以追溯到20世纪初,随着电子技术和计算机技术
的不断发展,自动控制理论也不断得到完善和发展。
02 03
当前发展
目前,自动控制理论正朝着智能化、网络化、鲁棒性等方向发展,各种 新型的控制算法和控制策略不断涌现,为解决复杂的系统控制问题提供 了更多有效的手段。
复合控制系统的优点是精度高、稳定性好、响应速度快, 同时结构相对简单、成本低、维护方便。
线性控制系统与非线性控制系统
01
线性控制系统是指系统 中各变量之间的关系可 以用线性方程描述的控 制系统。
02
非线性控制系统是指系 统中各变量之间的关系 不能用线性方程描述的 控制系统。
03
线性控制系统理论较为 成熟,分析和设计方法 相对简单。
动态性能定义
动态性能的改善方法
系统在输入信号作用下,系统输出的 变化特性。
通过调整系统参数,如减小系统增益 或增加系统阻尼比等。
动态性能的指标
上升时间、峰值时间、调节时间和超 调量等。
稳态性能分析
稳态性能定义
系统在稳态时输出的特性。
自动控制原理精品课程第三章习题解(1)精品文档6页

3-1 设系统特征方程式:试按稳定要求确定T 的取值范围。
解:利用劳斯稳定判据来判断系统的稳定性,列出劳斯列表如下:欲使系统稳定,须有故当T>25时,系统是稳定的。
3-2 已知单位负反馈控制系统的开环传递函数如下,试分别求出当输入信号为,21(),t t t 和 时,系统的稳态误差(),()().ssp ssv ssa e e e ∞∞∞和解:(1)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,因此系统是稳定的。
由G(s)可知,系统是0型系统,且K=10,故系统在21(),t t t 和输入信号作用下的稳态误差分别为:(2)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,且2212032143450,/16.8a a a a a a a ∆=-=>∆>=以及,因此系统是稳定的。
由G(s)可知,系统式I 型系统,且K=7/8,故系统在21(),t t t 和 信号作用下的稳态误差分别为:(3)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,且21203 3.20a a a a ∆=-=>因此系统是稳定的。
由G(s)可知,系统是Ⅱ型系统,且K=8,故系统在21(),t t t 和 信号作用下的稳态误差分别为:3-3 设单位反馈系统的开环传递函数为试求当输入信号2()12r t t t =++时,系统的稳态误差.解:由于系统为单位负反馈系统,根据开环传递函数可以求得闭环系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,因此系统是稳定的。
由G(s)可知,系统是Ⅱ型系统,且K=8,故系统在21(),t t t 和 信号作用下的稳态误差分别为10,,K∞,故根据线性叠加原理有:系统的稳态误差为: 3-4 设舰船消摆系统如图3-1所示,其中n(t)为海涛力矩产生,且所有参数中除1K 外均为已知正值。
自动控制理论课件自控课件(第三章)

China Agriculture University-East
二阶系统单位阶跃响应曲线
China Agriculture University-East
三. 欠阻尼二阶系统的动态过程分析
C(S) 1 TS 1
系统的输出称为脉冲响应,其表达式为:
c(t) L[C(S)] 1 et T , T
t0
China Agriculture University-East
单位脉冲响应曲线:
h(t)
3
2T
1
初始斜率 0.368 T
T 1
c(t) 1 et T T
2T
t 0 T 2T 3T 4T
1. 动态性能
2. 稳态性能
二. 典型输入信号
所谓的典型输入信号是指根据系统常遇到的输 入信号形式,在数学上加以理想化的一些基本输入 函数。
China Agriculture University-East
名称
单位阶跃函数
单位斜坡 (速度)函数
单位加速度 (抛物线)函数
单位脉冲函数
正弦函数
典型输入函数
系统的跟踪误差为:
t0
e(t) r(t) c(t) Tt T 2 (1 et T )
跟踪误差随时间推移而增大,直至无穷大。因此, 一阶系统不能实现对加速度输入函数的跟踪。
China Agriculture University-East
六. 四种典型输入信号响应的对比
输入信号
j s1 n 0
s2
s1 n
j n 1 2
0
s2
n 1 2
China Agriculture University-East
自动控制理论习题课三.ppt

(2)系统的开环增益不变
(3)相角裕度不小于30°,剪切频率为20s-1。
【解】
Kv
lim sG(s) lim s
s0
s0
s(
1
126 s 1)( 1
s 1)
126
10 60
esr
1 Kv
1 126
CHANG’AN UNIVERSITY
长安大学电子与控制工程学院
自动控制理论
习题课三
CHANG’AN UNIVERSITY
10 lg
CHANG’AN UNIVERSITY
长安大学电子与控制工程学院
自动控制理论
习题课三
20 lg K1 40[lg c1 lg1]
c1 15 3.87rad / s
0 180 (c1) 180 90 arctanc1
90 arctan3.87 90 75.51 14.49
0.5s 1 0.95s 1
CHANG’AN UNIVERSITY
长安大学电子与控制工程学院
自动控制理论
习题课三
【6—3 】设单位反馈系统的开环传递函数为
G(s)
s(s2
6 4s
6)
(1)计算校正前系统的剪切频率和相角裕度。
(2)串联传递函数为
Gc
(s)
s 1 0.2s 1
的超前校正装置,求
校正后系统的剪切频率和相角裕度。
画出未校正时系统开环传递函数的BODE图
20 lg K 40[lg c1 lg1]
c1 K 8 2 2 2.828rad / s 0 180 (c1) 180 90 arctan c1 arctan 0.2c1 9.92 0
CHANG’AN UNIVERSITY
《自动控制原理》习题及解答03

t1
T[ln(
T
T
)
ln
0.9]
则
tr
t2
t1
T
ln
0.9 0.1
2.2T
3) 求 ts
h(ts )
0.95
1
T T
e ts
/T
ts
T[ln
T T
ln 0.05]
T[ln
T T
ln 20]
T[3
ln
T T
]
3-3 一阶系统结构图如题 3-3 图所示。要求系统闭环增益 K 2 ,调节时间 ts 0.4 (s),试确定参数 K1, K 2 的值。
3-15 虚根。
h() lim s (s) 1 2.5
s0
s
已知系统的特征方程,试判别系统的稳定性,并确定在右半 s 平面根的个数及纯
4 1 )(s
1)
T1
T2
T1
T2
1 0.25
C(s) (s)R(s)
4
= C0 C1 C2
s(s 1)(s 4) s s 1 s 4
C0
lim s (s) R(s)
s0
lim
4
s0 (s 1)(s
4)
1
C1
lim (s
s1
1) (s)
R(s)
lim
s0
4 s(s
4)
4 3
考虑初始条件,对微分方程进行拉氏变换
s 2C(s) s c(0) c(0) 5 s C(s) c(0) 62.5C(s) 0 整理得 s 2 5s 62.5 C(s) s 5c(0) c(0)
对单位反馈系统有 e(t) r(t) c(t) , 所以
《自动控制理论(第3版)》邹伯敏课件第03章精编版
CT
1
-
e
1 T
0.632
阶跃 响应曲线 C(t)上升到其终值的63.2%时,对应的时间就是系统 的时间常数T
二、单位斜坡响应
令Rs 1s 2 则
Cs
1
S 2 1 Ts
1 S2
T S
T2 1 TS
C
t
t
T
1
e
1 T
t
2020/1/10
第三章 控制系统的时域分析
图3-9 二阶系统的实极点
11
自动控制理论
Cs n n 2 1 1
1
s s n n 2 1 s s n n 2 1
c t 1 e 2 1 nt
如令n 1, 2,则输出响应的准确值为
等加速度信号是一种抛物线函数,其数学表达式为
0
r
t
1 2
a
0
t
2
<t 0 t0
a0 常数。若a0 1,称为单位等加速度信号,其拉氏变换为1s3
四、脉冲信号
rt
0 H
t<0, t 0< t<
2020/1/10
图3-2
第三章 控制系统的时域分析
3
Cs
n2
ss n 2
1 s
n
2
s n 2
1 s n
其拉氏反变换为:
ct 1 1 nt ent t 0
2020/1/10
第三章 控制系统的时域分析
自动控制原理课件(第三章)习题课
自动控制原理
授课教师:胡玉玲
自动控制原理
1
小
结
1、时域分析法是线性系统重要的分析方法之一。 系统分析:快速性 调节时间 稳定性 判据 准确性 稳态误差 2、典型输入 3、一阶系统、二阶系统、高阶系统。
稳定性 快速性 稳态误差
2
自动控制原理
习 题 课
1、已知一阶系统的方框图如下图所示,求单位斜坡输入 的输出响应。
2.18 2 0.09 0.6 2
n 5.2 s 1
2
n K1 K 2 K2 C ( s) ( s) 2 K1 ( 2 ) K1 ( 2 ) 2 R( s) s as K 2 s as K 2 s 2 n s n
K 2 n 5.2 2 27.04
2 将上述K值带入辅助方程 52.5s 200 K 0
令s=jw,可求出相应的振荡频率
自动控制原理
4.05
7
习 题 课
4、系统的结构图如图所示,若系统以w=2持续振荡,试 确定相应的K和a的值。
R( s )
K ( s 1) s 3 as 2 2s 1
C (s)
解:由题设条件可知,系统存在一对共轭的虚根。对应的 劳斯表中某行各元均为零的情况。 由图得系统的闭环特征方程为:
s 3 as2 (2 K )s (1 K ) 0
自动控制原理
8
习 题 课
列出劳斯表如下:
s3 s2 s
1
1 a 1 K (2 K ) a 1 K
2 K 1 K 0 0
0
s0
1 K (2 K ) 0 a
自动控制理论第三章练习题
《自动控制理论》(二)第三章测试题一、单项选择题(每小题2分)1.对于欠阻尼的二阶系统,当阻尼比ξ保持不变时,( )A.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 越大B.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 越小C.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 不变D.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 不定11.系统特征方程式的所有根均在根平面的左半部分是系统稳定的( )A.充分条件B.必要条件C.充分必要条件D.以上都不是12.随动系统中常用的输入信号是斜坡函数和( )A.阶跃函数B.脉冲函数C.正弦函数D.抛物线函数3.二阶系统当0<ζ<1时,如果增加ζ,则输出响应的最大超调量p σ将( )A.增加B.减小C.不变D.不定2.一阶系统G(s)=1Ts K +的放大系数K 愈小,则系统的输出响应的稳态值( ) A.不变 B.不定 C.愈小 D.愈大7.主导极点的特点是( )A.距离实轴很远B.距离实轴很近C.距离虚轴很远D.距离虚轴很近5. 系统稳定的充分必要条件是其特征方程式的所有根均在根平面的( )A. 实轴上B. 虚轴上C. 左半部分D. 右半部分11. 对于欠阻尼的二阶系统,当无阻尼自然振荡频率ωn 保持不变时,( )A. 阻尼比ξ越大,系统的调整时间t s 越大B. 阻尼比ξ越大,系统的调整时间t s 越小C. 阻尼比ξ越大,系统的调整时间t s 不变D. 阻尼比ξ越大,系统的调整时间t s 不定1.控制系统的上升时间t r 、调整时间t S 等反映出系统的( )A.相对稳定性B.绝对稳定性C.快速性D.平稳性7.一阶系统的阶跃响应,( )。
A.当时间常数T 较大时有超调B.当时间常数T 较小时有超调C.有超调D.无超调2.时域分析中最常用的典型输入信号是( )A.脉冲函数B.斜坡函数C.阶跃函数D.正弦函数15.设单位负反馈控制系统的开环传递函数G o (s)=)a s (s K +,其中K>0,a>0,则闭环控制系统的稳定性与( )A.K 值的大小有关B.a 值的大小有关C.a 和K 值的大小有关D.a 和K 值的大小无关10. 对于一阶、二阶系统来说,系统特征方程式的所有系数都是正数是系统稳定的( )。
自控原理习题解答第三章
Y(s)
3 2(1)k 4; a 6 Y(s) 4 3 2 2 ; n 4, n 2;2 n 6, 1.5 1 X(s) s 6s 1 2 由s 2 6s 1 0,得s1 5.24, s 2 0.76 Y(s) 4 1 4 A B C s 2 6s 1 s s(s 5.24)(s 0.76) s s 5.24 s 0.76
自控原理习题解答(第三章)
3-1 已知二阶系统的传递函数为
n 2 G (s) 2 2 s 2 n s n
1
jω
随着参数ζ 、ω n的 变化,其一对极点 在s平面上有如图335所示的6种布,若 系统输入单位阶跃 号,试画出与这6对 极点相对应的输出 动态响应曲线的形 状和特征。
X(s)
Kp -
0.037 s(30s 1)
Y(s)
[答3 4] 0.037 Kp 0.037K Y(s) s(30s 1) p 30 0.037Kp 1 0.037 X(s) 30s2 s 0.037Kp 2 s s Kp 1 30 30 s(30s 1) 0.037 1 2 n K p rad/s,2 n , 0.90, 则 0.34(查图3 16) 30 30 n 0.048, K p 1.89 tp 0.037Kp
n
6s; 0.02 : t s
n
• [答3-3(3)] • 比较(1)和(2)性能指标得知:增加比 例反馈的作用后,使超调量大大减小,调 整时间大大减小,上升时间和峰值时间有 所增加,控制质量有所提高。
• 3-4设锅炉汽包水位的简单控制系统如图338所示,系统采用比例控制器。为使系统 的阶跃响应衰减率为ψ =0.90,试求控制器 的比例增益Kp,并按求得的Kp值计算系统 的峰值时间、调整时间和超调量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10 1
1 10 0 2 3
10 5 31 47 0 5
10 1 0
52 32
3 3
5
2 10 10 1 0 1
0 10 1
105 1 10 2 31 0 2
1015 3 153 0
系统不稳定
电气学院学习部资料库
10 1 0 0
解:(1)τ1=0,τ2=0.1时
G1s
10
ss
2
K1 5
1
1s
s2
10 2s 10
n
10 3.16
1 0.316 10
电气学院学习部资料库
% e 1 2 100% 35.09%
ts
3.5
n
3.5
rt t 1
1
ess
0.2 K K1
(2)τ1=0.1,τ2=0时 G2
r1t 2
ess1
2 1 Kp
0
r2 t 2t r3t t2
ess 2
2 Kv
0.2
ess 3
2 Ka
r(t)=2t时,系统的稳态误差 ess 0.2
r(t)=2+2t+t2时,系统的稳态误差 ess ess1 ess2 电es气s3学院学习部资料库
使用动态误差系数法(长除法)
Gs
s0.1s
1
0.02s2 0.3s 1 0.02s2 0.3s 21
er
0
•
er
0s
1 2!
••
er
0s2
...
1 21
6 212
s
...
电气学院学习部资料库
r1t 2
R1s
2 s
e s
e 0
•
e 0s
1
••
e
0s2
2!
...
1 21
6 212
•
s
...
ess1 t
Cir1i t
520 320
3520
4 0 10 1
1010 1 0
00 1
0
352 052
0 352
5 10 2
23
0 10 25 2 10 6 306
10 1 0 2
电气学院学习部资料库
3-13 已知单位反馈系统的开环传递函数为
Gs
ss
K0.5s 1
1 0.5s2 s
1
试确定系统稳定时的K值范围。
围。 Rs
+-
1 1 s
+ -
10
ss 1
Cs
τs
解:
10
Gs
1
1 s
1
ss 1
10
ss
1
•s
s
1 s
•
s2
10
10
1s
电气学院学习部资料库
s
1
Gs Gs
1
s
s s
1
s
• 1
s2 • s2
10
10
10
10
1s 1s
s3
10s 1 10 1s2 10s
10
Ds s3 10 1s2 10s 10 0
0 0 0.03s3 3 103 s49 104 s5 6 105 s6
0 0 0 5 103 s45 104 s5 6 105 s6
0 0 0 5 103 s45 104 s5 1.5105 s6 1105s7
e s 0 0.1s 2 102 s2 3 103 s3 5 104 s4
2 d
z dn
d
10 1 1
tg1
10
1
10 tg1 10
10
1 1 10
1
10
tg1 1 tg13 1.57
3
2
d tg1
1
2 d
tg1
d
1 1
10 1
tg13 71.560
1.25
电气学院学1习0 部资料库
tp
d
n
1
2 d
1.25 1.57 0.94s
ess1
2 1 Kp
2 21
ess 2
2 Kv
ess 3
2 Ka
r(t)=2t时,系统的稳态误差 ess
r(t)=2+2t+t2时,系统的稳态误差
ess ess1 ess2 ess3
电气学院学习部资料库
使用动态误差系数法
Gs
0.1s
20
10.2s
1
er
s
1
1
Gs
1
0.1s
1 20
10.2s
试确定系统的阻尼比ζ和自然频率ωn。
解:求脉冲响应为
•
k t h(t) 12e60t 12e10t 12 e10t e60t
求拉氏变换得
s
12 s
1 10
s
1 60
s2
600 70s
600
n 600 24电.5气学院学习部2资料7库0600 1.429
3-7 设图3-61是简化的飞行控制系统结构图,试 选择参数Kl和Kt,使系统的ωn=6,ζ=1。
z
1
2 d
2.5 3
2
d tg1
1
2 d
tg1
d
1 0.52 tg1 0.5
3 1.05
3
电气学院学习部资料库
tg1 n
1
2 d
tg1
1
2 d
tg1
1 0.52 tg1 1 0.52
z dn
d
2.5 0.51
0.5
tg1 3 tg1 3 tg1 3 tg1 3 1.68
第三章习题
电气学院学习部资料库
3-5
设单位反馈系统的开环传递函数为
Gs
0.4s 1
ss 0.6
试求系统在单位阶跃输入下的动态性能。
解:
s
Gs 1 Gs
0.4s 1 s2 s 1
n2
z
•
s2
sz
2 dn s
n2
d 0.5
n 1
z 1 2.5 0.4
z2 2dnz n2 4.75 1.007
试用劳斯稳定判据和赫尔维茨判据确定系统的 稳定性。
解: 使用劳斯判据
3s4 10s3 5s2 s 2 0
s4
352
s3
10 1 0
s 2 10 5 31 4.7 2 10
0
s1
-3.25 0
表中第一列元素变号2次,
系统不稳定,s右半平面
s0
2 电气学院学习部资料有库2个闭环极点。
使用赫尔维茨判据
2 s3
ess3 t
Cir3i t
i0
1 t2 21
12 212
t
... (Ci
1 i!
i
e
0;
i
0,1,2,...)
ess3
t
r(t)=2t时,系统的稳态误差 ess
r(t)=2+2t+t2时,系统的稳态误差
ess ess1 ess2 ess3
电气学院学习部资料库
2
解: Ds s4 3s3 4s2 2 K s 2K 0
s4
1
4
2K
s3
3
2+K
0
10 K
s2
3
2K
s1 (10 K)2 K 3 6K
0 K 1.705
10 K
s0
2K
电气学院学习部资料库
3-14 已知系统结构图如图3-65所示。试用劳斯稳
定判据确定能使系统稳定的反馈参数τ的取值范
s
100.1s 1 ss 1
K2 10
1
2 s
s2
s
10 2s 10
n 3.16 d 0.316 z 10
r z2 2dnz n2 102 2 0.316 3.16 10 10 1
z
1
2 d
10 1 1
10
电气学院学习部资料库
tg1 n
1
2 d
tg1
1
s3 1
10
0
s2 10 1 10
100
s1 s0
10 1
0
10 电气学院学习部资料库 0
3-15 已知单位反馈系统的开环传递函数:
1
Gs
0.1s
100
1s
5;
2
Gs
50
;
s0.1s 1s 5
3
Gs
102s 1 ;
s2 s2 6s 100
试求输入分别为r(t)=2t和r(t)=2+2t+t2时,系统
Gs
s0.1s
50
1s
5;
Gs
s0.1s
50
1s
5
s0.1s
10
10.2s
1
判断系统型次:I型系统 I型系统的速度误差系数
Kv
lim
s0
sGsH s
lim
s0
s
•
s0.1s
10
10.2s
1
lim
s0
0.1s
10
10.2s
1
10
电气学院学习部资料库
I型系统的位置误差系数 K p
I型系统的加速度误差系数 Ka 0
10
10.2s
1
s1
10 0.3s
0.02 s 2