第二章模糊控制的数学基础
第2章 模糊控制- 数学基础
③
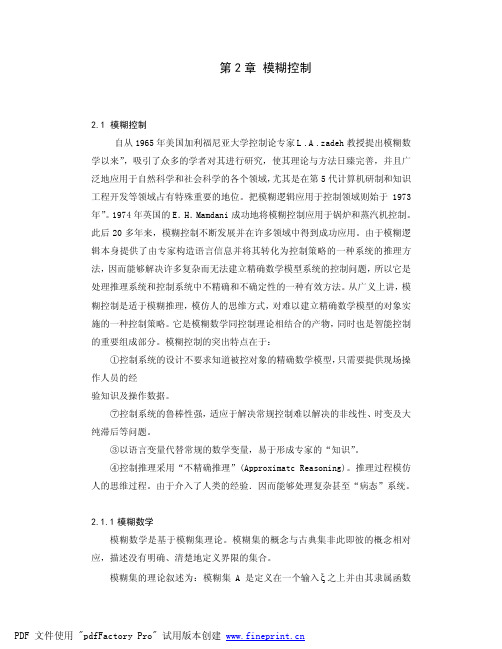
同一语言变量的所有语言值间要遵循语意顺 序、并避免其隶属函数间的不恰当重叠。
隶属度
很低 1 低 适中 高 很高
0
10
20
25
30
40
温度
25
1
重叠范围
两个隶属函数的全部范围
26
1
1
27
1
1
28
1
1
1
1
29
2.2.2 模糊关系(模糊推理的基础之一)
30
31
英 甲 乙 丙
2
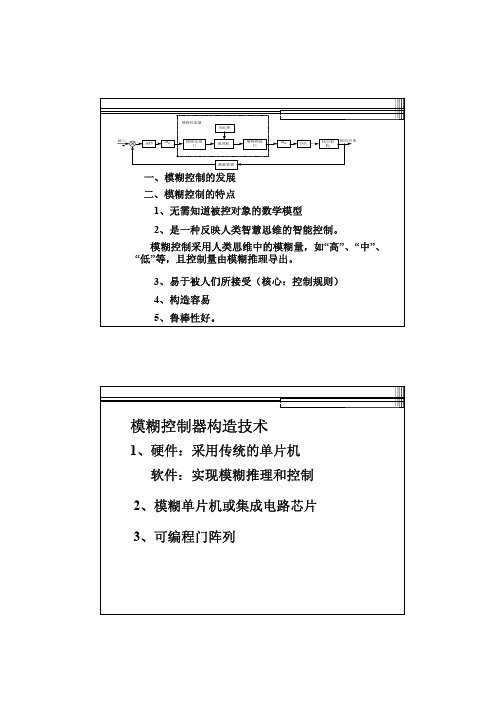
模糊控制的特点
①
无需知道被控对象的数学模型
以人们的控制经验为基础设计的控制器
②
与人类脑力活动的特点一致
模糊性:人类思维中采用模糊量,如:高、中、 低、大、小等。
经验性:模糊控制的核心是控制规则,模糊控 制中的知识表示、模糊规则和模糊推理是基于专家 知识或熟练操作工的成熟经验。模糊控制规则是用 人类语言表示的,如:衣服较脏,则投入洗涤剂较 多,洗涤时间较长。
45
⑤
⑥ ⑦
全由所考虑问题的目的或属性这样的外界因素 决定。一旦所考虑问题的目的或属性确定,关 系就客观存在了,但模糊关系中隶属度的确定 仍具主观性。 要完整确定出两个论域中的元素之间的关联性 (也即这两个论域间存在的关系),应该逐个考 虑这两个论域中的所有元素间的所有可能的配 对情况(所有配对的集合即为直积)。 数学上,关系体现为定义在两个论域的直积上 的(模糊)集合,也是该直积的子集。 两个有限论域之间的关系可以用矩阵表示,但 要将处于直积中前面论域中的所有元素排成列、 而将后面论域中的所有元素排成行。
第2章 模糊控制的数学基础
2.5 模糊关系
可见关系R是A,B的直积A×B的子集。也可将R表示为矩阵形式,假设R中 的元素r(i,j)表示A组第i个球队与B组第j个球队的对应关系,如有对阵 关系,则r(i,j)为1,否则为0,则R可表示为:
伊朗 沙特 阿联酋 中国 日本 韩国
A A A ,A A A
~ ~ ~ ~
A B AB, A B AB
~ ~ ~ ~ ~ ~ ~ ~
~ ~
A A
~ ~
2.4 λ水平截集
水平截集的定义
在论域U中,给定一个模糊集合A,由对于A的隶属度大于某一水平 值λ (阈值)的元素组成的集合,叫做该模糊集合的λ 水平截集。用 公式可以描述如下:
A { x , x , x , x } 0 . 2 2 3 4 5 A { x ,x } 0 . 7 4 5
2.4 λ水平截集
水平截集的性质
1)A∪B的λ 水平截集是Aλ和Bλ的并集:
( A B ) A B
2)A∩B的λ 水平截集是Aλ和Bλ的交集:
( A B ) A B
2.2 普通集合
3)集合的运算
* 集合交 设X,Y为两个集合,由既属于X又属于Y的元素组成的 集合P称为X,Y的交集,记作 P=X∩Y
X P Y
* 集合并
设X,Y为两个集合,由属于X或者属于Y的元素组成的 集合Q称为X,Y的并集,记作 Q=X∪Y
X Q
Y
* 集合补
在论域Y上有集合X,则X的补集为
X { x| xX}
R
1 0 0
0 0 1
0 1 0
该矩阵称为A和B的关系矩阵。
模糊控制数学基础
)
且定义g(vi /vj ) =1,当i=j时。
③以g(vi /vj ) (i , j=1,2)为元素构造相及矩阵G:
G
=
⎡1
⎢ ⎣
g
(v2
/
v1 )
g(v1 / v2 )⎤
1
⎥ ⎦
推广: n个元素 (v1 , v2 ,L , vn ) 的相及矩阵G:
⎡1
g(v1 / v2 ) g(v1 / v3 ) L g(v1 / vn ) ⎤
0
x ≤0
µF (u)=
1
1
+
100 u2
x>0
可算出µF (5)=0.2, µF (10)=0.5, µF (20)=0.8
可见µF (u)是U到闭区间[0,1]的映射。
U
µF (u)
5 10 20
[0,1]
0.2 0.5 0.8
模糊集合的表示方法:
1、论域U为离散域(即论域U是有限集合)
(1)查德表示法
两个模糊集A和B,若对所有元素u,它们的 隶属函数相等,则A和B也相等。即
A = B ⇔ µ A (u) = µ B (u)
设A、B为U中的两个模糊子集,隶属函 数分别为µA 和µB,则模糊集合中的并、交、 补等运算按如下定义: 并(析取):并(A∪B)的隶属函数µA∪B对 所有的u ∈U 被逐点定义为取大运算,即: µA∪B= µA(u)∨µB(u) 式中,符号“∨”为取大 值运算。
µF (u)=1:u完全属于U; µF (u)= 0:u完全不属于U; 0< µF (u)<1:u部分属于U。
U中的模糊集F可以用元素u和它的隶属度 来表示:
F={(u ,µF (u) )| u∈U}
模糊控制的数学基础-1(2-16至2-30)模糊运算、分解定理
从中可见,随着实验次数n 的增加,27岁对“青年人”的频率基本稳定在0.78附近,近似可取()78.027~=A μ。
②例证法此法是扎德教授于1972年提出的。
基本思想—从模糊子集~A的有()x A ~μ的值,估计出论域U 上~A 的隶属函数。
例如:取论域U 是实数域R 中的一部分[0,100], ~A 是U 上―较大的数‖,虽然~A 是U 上的模糊子集。
为确定()x A ~μ的分布,选定几个语言真值(即一句话为真的程度)中的一个,来回答[0,100]中的某数是否算―较大‖。
如果语言真值分为―真的‖、―大致真的‖、―半真半假‖、―大致假的‖、“假的”。
把这些语言真值分别用[0,1]之间的数字表示,即分别为1,0.75,0.5,0.25和0。
对[0,100]用的αϕ个不同的数都作为样本进行询问,就可得~A 的模糊分布()x A ~μ的离散表示法。
③专家评分法(德尔菲法)该法40年代以来就已广泛应用于经济与管理科学的各个领域,典型的例子是在体操比赛中对运动员的评分,“技术好”是运动员集上的一个模糊 ,所有评委打分的平均值(有时去掉一个最高分和一个最低分)就是运动员“技术好”的隶属度。
这种方法也可以用来求模糊分布,在应用时,为了区别专家的学术水平和经验的多少,还可以采用加权平均法。
§2—2 模糊子集的特性及运算法则前面已讨论过普通集合的基本运算,下面对模糊子集的运算另作定义。
一、 模糊子集的运算法则 ① Fuzzy 子集的包含与相等设~A 、~B 为论域U 上的两个模糊子集,对于U 中的每一个元素x ,都有()x A ~μ≥()x B ~μ,则称~A 包含~B ,记作~A ⊇~B 。
如果,~A ⊇~B 且~B ⊇~A ,则说~A 与~B 相等,记作~A =~B 。
或者,若对所有x ∈U ,都有()x A ~μ=()x B ~μ,则~A =~B 。
②模糊子集的并、交、补运算设~A 、~B 为论域U 上的两个模糊子集,规定~A ~B 、~A ~B 、~A 的隶属函数分别为~~BAμ、~BAμ、~A μ,并且对于U 的每一个元素x 都有~~BAμ()∆x ()x A ~μ∨()x B ~μ=max[()x A ~μ,()x B ~μ] —~A ,~B 的并~~BAμ()∆x ()x A ~μ∧()x B ~μ=min[()x A ~μ,()x B ~μ]— ~A ,~B 的交~Aμ()∆x 1–()x A ~μ —~A 的补eg,设论域U={}4321,,,x x x x ,~A 、~B 是论域U 上的两个模糊集。
智能控制02-模糊控制的数学基础ppt课件
x
5,
x 180
1,
x 150 x(150,180)
x 180
矮个子模糊集合 ppt精选版 高个子模糊集合 23
知识点:如何对变量进行模糊化
确定变量 定义变量的论域 定义变量的语言值(即模糊集合) 定义每个模糊集合的隶属函数
ppt精选版
24
An Example
1
速度:论域[0,200]
0
表 示 x完 全 不 属 于 A
A(x) 1
表 示 x完 全 属 于 A
0A(x)1 表 示 x部 分 属 于 A
ppt精选版
16
模糊集合的表示方法
Zadeh表示法 序偶表示法 隶属函数表示法
有限元素集合 连续元素集合
参见教材page13-14:例2-4,例2-5,例2-6.
ppt精选版
A1A(u)
ppt精选版
32
模糊集合运算举例
例:设论域为{u1,u2,u3,u4,u5}的两模糊集合分别为
A0.20.710.5, u1 u2 u3 u4
B0.10.30.810.5 u1 u2 u3 u4 u5
求
A B ,A B ,A ,和 B
完成教材P15:例2-7的练习
ppt精选版
33
模糊运算的性质
2.2 Fuzzy Sets
模糊集合是模糊控制的数学基础
经典集合 模糊集合
有明确分界限的元素 的组合
描绘模糊语言概念
ppt精选版
9
A={1,3,5,7, 9}
Classical Sets B={2,4,6,8,10}
十九世纪末,康托建立了经典集合理论 集合
具有某种特定属性的对象的全体。 通常用大写字母A, B, C, …表示
模糊控制
第2章模糊控制2.1 模糊控制自从1965年美国加利福尼亚大学控制论专家L .A .zadeh教授提出模糊数学以来”,吸引了众多的学者对其进行研究,使其理论与方法日臻完善,并且广泛地应用于自然科学和社会科学的各个领域,尤其是在第5代计算机研制和知识工程开发等领域占有特殊重要的地位。
把模糊逻辑应用于控制领域则始于1973年”。
1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机控制。
此后20多年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种系统的推理方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
从广义上讲,模糊控制是适于模糊推理,模仿人的思维方式,对难以建立精确数学模型的对象实施的一种控制策略。
它是模糊数学同控制理论相结合的产物,同时也是智能控制的重要组成部分。
模糊控制的突出特点在于:①控制系统的设计不要求知道被控对象的精确数学模型,只需要提供现场操作人员的经验知识及操作数据。
⑦控制系统的鲁棒性强,适应于解决常规控制难以解决的非线性、时变及大纯滞后等问题。
③以语言变量代替常规的数学变量,易于形成专家的“知识”。
④控制推理采用“不精确推理”(Approximatc Reasoning)。
推理过程模仿人的思维过程。
由于介入了人类的经验.因而能够处理复杂甚至“病态”系统。
2.1.1模糊数学模糊数学是基于模糊集理论。
模糊集的概念与古典集非此即彼的概念相对应,描述没有明确、清楚地定义界限的集合。
模糊集的理论叙述为:模糊集A是定义在一个输入ξ之上并由其隶属函数µA(·):ξ→[0,1]表征的集合。
假设ξ是一个普通集合,称为论域。
从ξ到区间[0,1]的映射A称为ξ上的一个模糊集合。
µA(·)表示ξ隶属于模糊集合A的程度,称为隶属度。
模糊控制 - 数学基础

一、模糊集合
6、运算性质
F集幂等律: A A=A,A A=A F集两极律:A =,A U=U F集同一律: A U=A,A =A F集交换律: A B=B
A,A B =B A
F集结合律: A B C =A
B
C , A B C =A
4
一、模糊集合
例1 设集合U 由1到5的五个自然数组成,用上述前三 种方法写出该集合的表达式。
解:(1)列举法 U ={1,2,3,4,5} (2)定义法 U ={u|u为自然数 且 1u5 }
(3)归纳法 U ={ui+1 = ui+1, i = 1,2,3,4, u1 = 1}
(4)特征函数表示法:集合U通过特征函数来TU(u)表示 u U 1 TU (u) u U 0
A
其中隶属函数定义为
x, ( x) x U
A
A ( x)
1 1 10 x 2
“接近于0的实数”之模糊集合
12
一、模糊集合
例:拥有离散性论域的模糊集合 假设U ={ 0,1,2,...,9 } 为代表一个家庭中,所可能拥有子女个数的集 合,令三个模糊集合之定义为A:子女数众多,B:子女数适中,C:子 女数很少,其隶属函数的定义如表所示。
子女数 0 1 2 3 4 5 6 7 8 9 子女众多 (A) 0 0 0 0 0 0.1 0.3 0.8 1 1 子女适中 (B) 0 0 0.2 0.7 1 0.7 0.2 0 0 0 子女很少 (C) 1 1 0.8 0.2 0.1 0 0 0 0 0
一、模糊集合
3、模糊集合的表示
当论域U由有限多个元素组成时,模糊集合可用向量表示法或扎德 表示法表示。设 U {x1 , x2 , , xn } { 0,1, 2,..., 9 }
2模糊控制的数学基础

分解定理
设A是论域X上的模糊集合,λ∈[0, 1],A是A的λ截集,则有
A A 0, 1 其中λAλ为x的一个特殊模糊集合,其隶属函数为
, A (x) 0,
x A x A
说明任何一个模糊集可由 一个普通集合簇来表示
Page 30
2.3 模糊集合与普通集合的联系
分解定理 为了对分解定理有一个直观的了解,在左图中,取λ1、 λ2∈[0,1]两个值
集合的直积 序偶 将不同的事物按一定顺序排列起来组成一个整体, 用以表达它们之间的关系,这就叫做序偶。 集合的直积 有两个集合X,Y,从X中取一个元素x,从Y中取一个元 素y,把它们组成一个序偶,所有元素序偶的全体组成一 个新的集合,这个集合叫做集合X,Y 的直积,表示为
X Y {(x, y) | x X , y Y}
A {x | x X , A (x) }
称 A为A的λ强截集
当λ=1时,得到的最小的水平截集A1称为模糊集合A的核。 当λ=0+时,得到的最大的水平截集称为模糊集合A的支集。 如果A的核A1非空,则称A为正规模糊集,否则称为非正规 模糊集。
Page 27
2.3 模糊集合与普通集合的联系
λ水平截集
0
25 50 75 100
u
Page 20
2.2 模糊集合
例2.2.3
“年轻”和“年老”模糊集合可以写为:
Y
1
1
(
x
25) 5
2
1
x 0x25
25x200
x
O
0
1
(
x
5 50
)
2
1
x 0x50
50x200
x
Page 21
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5. 映射与关系 存在, 设有集合 X 和 Y ,若有一对应法则 f 存在,使得对 与之对应, 于集合 X 中任意元素 x,有 Y 中唯一的元素 y 与之对应, 的映射, 则称此对应法则 f 为从 X 到 Y 的映射,记为
f : X →Y
的定义域, 称 X为映射 f 的定义域,而集合 的值域。 称为 f 的值域。
18
若对于模糊集合 A 有一个有限的台 {u1,u2 ,⋅ ⋅ ⋅,un },则可 ~ 表示为如下一般形式
A=
~
µ1
u1
+
µ2
u2
+⋅⋅⋅ +
µn
un
=∑
i=1
n
µi
ui
2. 序偶表示法 将论域中的元素 ui与其隶属度 A(ui ) 构成序偶来表示 A , ~ ~ 则
A= {(u1, A(u1 )),(u2 , A(u2 )),..., (un , A(un ))}
6
2.1.2
精确性、 精确性、模糊性与随机性 确定性——经典数学 经典数学 确定性 随机性——统计数学 统计数学 随机性 不确定性 模糊性——模糊数学 模糊性 模糊数学 随机性: 随机性:事件本身的性态和类属是确定的 模糊性: 模糊性:事件本身的性态和类属是不确定的
7
2.2
模糊集合
2.2.1 普通集合 一、基本概念 1. 论域(Universe of discussion) 论域( ) 将考虑的议题局限在一定的范围内,该范围称为论域。 将考虑的议题局限在一定的范围内,该范围称为论域。 2. 元素(Element) 元素( ) 论域中的每个对象称为元素。 论域中的每个对象称为元素。 3. 集合(Set) 集合( ) 给定一个论域, 给定一个论域,其中具有相同属性的确定的可以彼此区别的元素的 全体称为集合。 全体称为集合。 4. 全集、空集、子集 全集、空集、 全集:集合中包含了论域中的全部元素。 全集:集合中包含了论域中的全部元素。 空集: 称为空集,记为Ø。 空集:不包含论域中任何元素的集合称为空集,记为 。 子集( ):对于 称为A为 的一个子 子集(Subset):对于 ∀x ∈ A ⇒ x ∈ B , 称为 为B的一个子 ): 集, A⊆ B
A = ∫U
~
A(u)
~
u
17
在由整数1, , , 组成的论域中 组成的论域中, 例2-2 在由整数 ,2,…,10组成的论域中,即 U={1,2,3,4,5,6,7,8,9,10},讨论“几个”这一模糊概念。根 ,讨论“几个”这一模糊概念。 据 经验,可以定量地给出它们的隶属函数,模糊子集“几个” 经验,可以定量地给出它们的隶属函数,模糊子集“几个” 可 表示为 = A
3
明确的概念可用经典集合描述。 明确的概念可用经典集合描述。 经典集合的特征函数表示: 经典集合的特征函数表示:
1, 当x ∈ A CA (x) = 0 , 当x ∉ A
经典数学建立在德国数学家乔•康托( 经典数学建立在德国数学家乔 康托(G•Contor)创立的 康托 ) 经典集合论之上,可用来描述客观世界存在的确定性事件, 经典集合论之上,可用来描述客观世界存在的确定性事件, 但对模糊性事件则无能为力。 但对模糊性事件则无能为力。
AUU = U, AIU = A AU Ø = A , A I Ø=Ø
7.复原律
( Ac )c = A
13
8.互补律 9.对偶律
A U Ac = U ,
A I Ac = Ø
( A U B)c = Ac I Bc
( A I B)c = Ac U Bc
14
2.2.2
模糊集合 一、模糊集合的定义 的子集, 模糊集合往往是某一论域 U 的子集,所以人们在谈论 模糊集合时,常常习惯称它为“模糊子集”。我们一般采用 模糊集合时,常常习惯称它为“模糊子集” 在大写字母下边加波浪线来表示模糊集合。 在大写字母下边加波浪线来表示模糊集合。例如 A 就表示 ~ 一个模糊集合。1965年 Zadeh将模糊子集定义为 将模糊子集定义为: 一个模糊集合。1965年,Zadeh将模糊子集定义为: 上的一个元素, 设给定论域 U ,u 为 U 上的一个元素, 到闭区间 U [0,1] 的任一映射 µA
4
控制论的创始人维纳( 控制论的创始人维纳(Norbert Wiener) ) 在谈到人为什么能胜过任何最完善的机器时, 在谈到人为什么能胜过任何最完善的机器时, 强调说: 人具有运用模糊概念的能力” 强调说:“人具有运用模糊概念的能力”。 如何使计算机能够模拟人脑思维的模糊性 特点, 特点,使部分自然语言作为算法语言直接进入 计算机程序,让计算机完成更复杂的任务, 计算机程序,让计算机完成更复杂的任务,这 正是模糊数学诞生的直接背景。 正是模糊数学诞生的直接背景。
f ( X ) = { f (x) x ∈ X}
11
关系: 关系:对于给定集合 X 、 Y 的直积 X ×Y 上的一个子集 R, 的二元关系,简称为关系。 称为 X 到 Y 的二元关系,简称为关系。对于 X ×Y 的元 相关, 素 (x, y),若有 (x, y) ∈ R,则称 x 与 y 相关,记为 x R y 否则 (x, y) ∉ R ,记为 x R y 。
~
µA :U →[0 ,1]
~
µ~ 都确定 U 的一个模糊子集 A , A 称为模糊子集的隶属函 ~ µ~ 的隶属度。 数, A(u) 称为 u 对于 A的隶属度。隶属度也可记为A(u), ~ ~ 的程度。 它表示某元素 u 属于模糊集合 A 的程度。U 上的模糊集合 ~ 的全体记为 F(U) 。 15
16
二、模糊集合的表示法 1. 查德(Zadeh)表示法 查德( ) 查德提出的表示法是, 查德提出的表示法是,当 U为有限集 {u1,u2 ,⋅ ⋅ ⋅un} 时, U上的模糊集 A可表示为
~
A=
~
A(u1 )
~
u1
+
A(u2 )
~
u2
+⋅⋅⋅ +
A(un )
~
unห้องสมุดไป่ตู้
当是有限连续域时, 当是有限连续域时,查德给出如下记法
A U B = B U A, AI B = B I A
(A U B) U C = A U (B U C)
(A I B) I C = A I (B I C)
AU (B I C) = (A U B) I ( A U C)
A I (B U C) = (A I B) U (AI C) , A U ( A I B) = A A I ( A U B) = A
参考文献: 参考文献: 1. 姜长生等,智能控制与应用,科学出版社, 姜长生等,智能控制与应用,科学出版社, 2007年7月。 年 月 2. 许力,智能控制与智能系统,机械工业出 许力,智能控制与智能系统, 版社, 版社,2007年2月。 年 月 3. 诸静,模糊控制与系统原理,机械工业出 诸静,模糊控制与系统原理, 版社, 版社,2005年8月。 年 月 4. 易继锴等,智能控制技术,北京工业大学 易继锴等,智能控制技术, 出版社, 出版社,1999年 年 5. 李士勇,模糊控制、神经网络控制和智能 李士勇,模糊控制、 控制论,哈尔滨工业大学出版社, 控制论,哈尔滨工业大学出版社,1996年 年
设 f : X →Y ,显然有 {(x, y) y = f (x)} ⊂ X ×Y ,可见 映射 是关系的特例。 f 是关系的特例。
12
6. 集合的运算性质 设 A、 、 ⊂U,其并、交、补运算具有以下性质: B C
1.幂等律 2.交换律 3.结合律 4.分配律 5.吸收律 6.同一律
A U A = A, A I A = A
2
Fuzzy —— 模糊的,不分明的,边界不清的, 模糊的,不分明的,边界不清的,
毛绒绒的。 毛绒绒的。 所谓模糊性, 所谓模糊性,主要是指客观事物彼此间的差 不分明性” 异在其中间过渡时的 “不分明性” 。 例如 “大与小” 、 “胖与瘦” 很难用精确 大与小” 胖与瘦” 的数学语言划分出一条截然分明的界线。 的数学语言划分出一条截然分明的界线。
~ ~ ~ ~
3. 向量表示法
A= ( A(u1 ), A(u2 ),..., A(un ))
~ ~ ~ ~
19
4. 隶属函数法
当论域U为实数集 上的某区间时 当论域 为实数集R上的某区间时,直接给出模糊集隶 为实数集 上的某区间时, 属函数的解析式,是使用十分方便的一种表达形式。 属函数的解析式,是使用十分方便的一种表达形式。 如查德给出论域U=[0,100]上的“年老”──O 与“年 上的“ 如查德给出论域 上的 年老” ~ 两个模糊集的隶属函数如下: 轻”── Y 两个模糊集的隶属函数如下:
~
0 0 0.3 0.7 1 1 0.7 0.3 0 0 + + + + + + + + + 1 2 3 4 5 6 7 8 9 10
µA(u)
~
A
~
在论域U中 在论域 中,隶属度
>0的元素集称为
的台。 的台。
0.3 0.7 1 1 0.7 0.3 采用台的方式可将模糊集合“几个”表示为: 采用台的方式可将模糊集合“几个”表示为: A= + + + + + ~ 3 4 5 6 7 8
8
二、集合的表示法 1. 列举法: 列举法:
偶数集合A= 例:论域U={1, 2, 3, ……, 9} ,偶数集合 ={2,4,6,8} 2. 描述法 描述法: A= { x | P(x) } ,P(x)为x应满足的条件。 为 应满足的条件。 应满足的条件 为偶数, 例 :A={x∣x为偶数,x<10} ∣ 为偶数 3. 特征函数法: 特征函数法: