二相八线步进电机接线方法
步进电机控制原理
步进电机控制原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
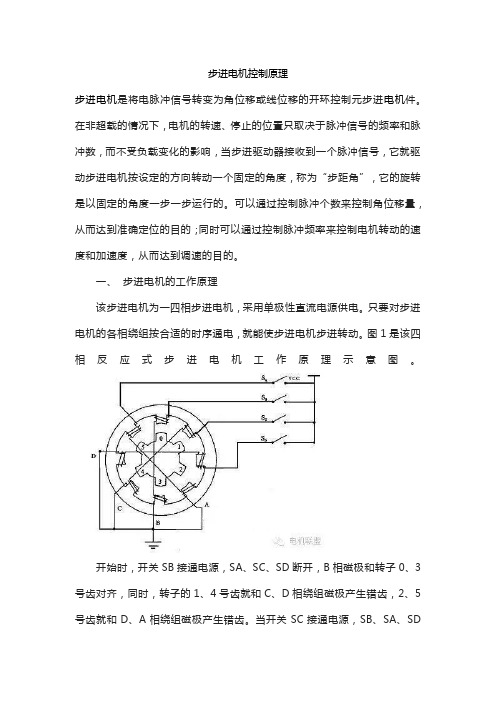
一、步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D 四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍51单片机驱动步进电机的方法:驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
DM860数字式两相步进驱动器使用说明书
深圳市雷赛智能控制股份有限公司地址:深圳市南山区登良路25号天安南油工业区二座三楼邮编:518052电话:400-885-5521传真:0755-********Email:info@网址:上海分公司北京办事处地址:上海市淞江区九亭镇九新公路地址:北京市朝阳区北苑路13号院领地76号嘉和阳光大厦9楼office1号楼A单元606号电话:021-********电话:010-********传真:021-********传真:010-********DM860数字式两相步进驱动器使用说明书版权所有不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】深圳市雷赛智能控制股份有限公司目录一、产品简介 (2)1.概述 (2)2.特点 (2)3.应用领域 (2)二、电气、机械和环境指标 (2)1.电气指标 (2)2.使用环境及参数 (3)3.机械安装图 (3)4.加强散热方式 (4)三、驱动器接口和接线介绍 (4)1.接口描述 (4)2.控制信号接口电路 (5)3.控制信号时序图 (5)4.控制信号模式设置 (6)5.接线要求 (6)四、电流、细分拨码开关设定和参数自整定 (7)1.电流设定 (7)2.细分设定 (7)3.参数自整定功能 (8)五、供电电源选择 (8)六、电机选配 (8)1.电机选配 (8)1.电机接线 (9)2.输入电压和输出电流的选用 (9)七、典型接线案例 (10)八、保护功能 (11)九、常见问题 (12)1.应用中常见问题和处理方法 (12)2.用户常见问题解答 (13)雷赛产品保修条款 (14)DM860数字式两相步进驱动器一、产品简介1.概述DM860是雷赛公司新推出的数字式两相步进电机驱动器,采用最新32位DSP技术,用户可以设置400~51200内的细分以及额定电流内的任意电流值,能够满足大多数场合的应用需要。
由于采用内置微细分技术,即使在低细分的条件下,也能够达到高细分的效果,低中高速运行都很平稳,噪音超小。
雷赛M545D(V4.0)数字式两相步进驱动器使用说明书

深圳市雷赛智能控制股份有限公司址:深圳市南山区学苑大道1001号南山智园A3编:518000话:联系店铺客服发货时间:8:30-17:45工作日Email:*************************雷赛智能旗舰店(天猫):https:// 雷赛智能商城:M545D(V4.0)数字式两相步进驱动器权所有翻版必细阅读本手册,以免损深圳市雷赛智能控制股份有限公司目录一、产品简介.....................................................................................................................................21.概述................................................................................................................................................22.特点................................................................................................................................................23.应用领域二、电气、机械和环境指标1.电气指标2.使用环境及参数3.机械安装图4.散热方式三、驱动器接口和接线介绍1.接口描述2.控制信号接口电路3.控制信号时序图4.报警信号接口电路5.接线要求四、电流、细分拨码开关设定1.电流设定2.每转脉冲设定五、供电电源选择六、电机选配1.电机选配2.电机接线3.输入电压和输出电流的选用七、典型接线案例九、常见问题1.应用中常见问题和处理方法2.用户常见问题解答 (12)M545D(V4.0)数字式两相步进驱动器一、产品简介1.概述M545D(V4.0)是雷赛公司新推出的高性能数字式两相步进驱动器,采用数字PID 技术,2.使用环境及参数※推荐采用侧面安装,散热效果更佳,安装设计时,需要考虑接线端子大小和散热所需空间!4.散热方式图示图1安装尺寸图(单位:毫米)4)状态指示说明:当控制信号是5V 时,不用接R 电阻,需要将滑动开关拨到5V 信号选择位置;当控制性是24V 时,不用接R 电阻,需要将滑动开关拨到24V 信号选择的位置;当控制信号是12V 时,R 为1K Ω,同时需要将滑动开关拨到5V 信号选择位置;3.控制信号时序图为了避免一些误动作和偏差,PUL、DIR 和ENA 应满足一定要求,如下图所示:。
步进电机原理及使用说明-安装接线方法
步进电机原理及使用说明-安装接线方法步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件双击自动滚屏发布者:admin 时间:2008-8-20 19:25:05 阅读:1050次【字体:大中小】一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
Kinco CM880A步进驱动器使用指南

CM880A 步进驱动器使用指南1.电机配置用户可登录 下载中心,下载“Kinco 步进上位机调试软件(适用于FM-CM 系列)”。
在通讯连接良好条件下,进入软件界面,由菜单栏—电机—电机配置进行操作。
图1-1 电机配置用户可选择以下3种方式中的任意一种方式,配置电机参数。
(1)自检测电机参数(驱动器出厂默认设置,电机型号为MC ) 驱动器出厂默认设置:电机型号为MC ,电机相数为2,电机相电流默认值3A (有效值)。
如果相电流不是3A ,请设置为电机对应的相电流。
上电自检测电机参数为1。
驱动器默认自检测2相电机,若用户使用3相电机,驱动器的指示灯会报错:RUN 灯快闪,ERR 灯常亮,(若用户使用调试软件,实时错误菜单会显示驱动器内部错误和寻找电机错误) ,用户需要将电机相数更改为3,存储电机参数,驱动器重启后可正常使用。
(2)选择电机型号若用户不采用自检测电机参数,可以直接选择对应电机型号,驱动器会自动调用电机相关参数。
(3)自定义电机参数(电机型号为XX )若采用第3方电机, 可以把电机型号设置为XX ,用户自行输入电机相关参数。
2. 四,八线步进电机接线对于4,8线步进电机,引线颜色见下图。
其中8线电机有两种接法,其性能差异如下:a.并联接法使线圈电感变小,适合高速运转,但需驱动器提供更大的电流,才能达到所需扭矩。
b.而串联接法使线圈电感变大,适合低速运转,驱动器提供小的电流,就能达到所需扭矩,见下图2-3和2-4。
图2-1四线电机 图2-2八线电机 图2-3 八线电机串行接法 图2-4八线电机并行接法3.电流设置出厂驱动器,电机相电流默认值3A (有效值)/4.2A (峰值)。
正常情况下,设置范围为0A (有效值)/0A (峰值)~5.7A(有效值)/8A(峰值)。
用户可以根据应用需求,设置电机相电流。
用户更改电流设置后,需要存储电机参数,驱动器重启后可正常使用。
4.细分设置图4-1 细分设置在脉冲模式(-4模式)下,细分设置:细分=每转脉冲个数/(360o /步矩角)。
MA860H步进电机驱动器使用手册说明书

MA860H(低成本7.2A,80VAC)256细分步进驱动器使用手册Version1.0版权所有不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】宁波纳川自动化科技有限公司MA860H步进电机驱动器使用说明在使用本品前,请仔细阅读本使用说明书请妥善保管本说明书,以备日后参考本册外观图片仅供参考,请以实物为准安全注意事项本产品为交直流电源供电。
请勿带电插拔连接线缆。
此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿。
驱动器为功率设备,尽量保持工作环境的散热通风。
在连上步进电机,调节好电流后使其连续工作半小时后观察步进电机是否在。
额定温度后方可进行后续使用,如果电机温度过高请联系制造商。
一、产品简介1.1 产品特点⏹平均电流控制,两相正弦电流驱动输出⏹供电电压可达110VDC,80VAC⏹输出电流峰值可达7.2A(均值6A)⏹静止时电流自动减半⏹可驱动4,6,8线两相、四相步进电机⏹高速光耦隔离信号输入,脉冲响应频率最高可达300KHz⏹抗高频干扰能力强⏹输出电流1.0A~7.2A。
⏹输出电流设定方便⏹细分精度2,4,6,8,16, 32, 64, 128, 256, 5, 10, 20, 25, 40, 50, 100, 125, 250 细分;⏹有过压、欠压、过流、相间短路保护功能1.2 应用领域适合各种中中型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、小噪声、高速度的设备中效果特佳。
二、电气、机械和环境指标2.1 电气指标说明 MA860H最小值 典型值 最大值 单位 输出电流 2.6 - 7.2(均值6A) A 输入电源电压 24 60-100 150(含纹波) VDC 18 55-80 100(含纹波)VAC 逻辑输入电流 7 10 16 mA 步进脉冲频率 0 - 300 KHZ绝缘电阻500M Ω2.2 使用环境及参数冷却方式自然冷却使用环境场合 尽量避免粉尘、油雾及腐蚀性气体环境温度0℃-+50℃ 最高工作温度70℃湿度 40-90% RH9 (不能结露和有水珠)震动 5.9m/S2 Max 保存温度 -20℃-125℃ 重量约500克2.3 机械安装图 单位:毫米※:推荐采用侧面安装,散热效果更佳三、驱动器接口及接线介绍:3.1:弱电接线信号接口描述3.2:强电接口描述* 交流电输入时按照直流电压的1/1.4来选择电压临界值3.3输入接口描述MA860H 内置高速光电耦合器,允许接收长线控制器,集电极开路和PNP 输出电路的信号。
VD2 两相步进电机驱动器 用户手册说明书

目录1 简介 (3)1.1 概述 (3)1.2 特性 (3)2 产品功能框图 (4)3 性能指标 (4)3.1 电气指标 (4)3.2 环境指标 (4)4 端口与接线 (5)4.1 电源连接 (5)4.2 电机连接 (6)4.3 控制信号连接 (7)4.3.1 脉冲&方向信号 (7)4.3.2 使能信号 (7)4.3.3 控制信号输入示例 (7)4.3.4 驱动器状态指示灯 (8)5 驱动器运行参数设定 (9)5.1 电流设定 (9)5.2 自动减流设定 (9)5.3 细分设定 (10)5.4 自检 (10)5.5 细分插补 (10)5.6 负载惯量选定 (11)5.7 数字信号滤波选定 (11)6 安装 (12)7.1 机械尺寸 (12)7.2 驱动器安装 (12)1 简介感谢您选择我司的驱动器。
希望我们产品优越的性能、优异的质量和优秀的性价比可以帮助您成功的完成运动控制项目。
如果您对我们的产品有什么建议或者需要我们的帮助,请致电************,你也可以给我们发送邮件*******************。
1.1 概述VD2系列两相步进电机驱动器是基于PID电流控制算法设计的高性价比细分型驱动器,具有优越的性能表现,高速大力矩输出,低噪音,低振动,低发热,特别适合OEM客户的大批量应用场合。
VD2驱动器可通过拨码开关选择运行电流和细分,有16种细分,8种电流供选择,具有过压,欠压,相电流过流保护,其输入输出控制信号均采用光电隔离。
1.2 特性■供电电源 VD2:12 - 48 VDC■输出电流拨码开关设定,8种选择,最大2.2安培(峰值)■电流控制 PID电流控制算法,高速大力矩输出,低振动,低噪音,低发热■细分设置拨码开关设定,16种选择: 200, 400, 800, 1600, 3200, 6400, 12800, 25600,1000, 2000, 4000, 5000, 8000, 10000, 20000, 25000 step/rev■速度范围选配合适的步进电机,最高可达3000rpm■共振抑制自动计算共振点,抑制中频振动■系统自测驱动器上电初始化自动检测电机参数并由此优化电机电流算法和抗共振电子阻尼系数■控制方式脉冲&方向模式,双脉冲模式■输入滤波拨码开关选择,2MHZ/150KHz数字信号滤波器■空闲电流拨码开关选择在电机停止运行后1.0秒电流会自动减为运行电流的50%或90%■产品自检拨码开关启停,电机以1rev/s速度做正反转两圈往复运动■负载惯量拨码开关选择高低不同的负载惯量,使系统运行在最佳状态■细分插补拨码开关选定,可降低电机运转的振动,提高运行的平滑性2 产品功能框图3 性能指标3.1 电气指标驱动器参数最小值典型值最大值单位供电电压12-48VDC 输出电流(峰值)0.3- 2.2Amps控制信号导通电流61015mA步进脉冲频率2-2M Hz步进脉冲宽度250--ns方向信号宽度50--us欠压保护点-10-VDC过压保护点-52-VDC输入信号电压 4.0-28VDC驱动器初始化时间-- 2.5S 3.2 环境指标冷却方式自然冷却或强制冷却使用环境使用场合避免粉尘,油雾及腐蚀性气体工作环境温度0-40°C [32 - 104°F]最高环境湿度90% RH(无结露)存储温度-10-70°C [14 - 158°F]振动 5.9m/s2 maxBlock DiagramVD24 端口与接线请参照接口关系图,使用VD2驱动器,需要做以下准备:12-48VDC 合适功率的直流电源控制信号源相匹配的步进电机(为取得最佳性能,请与英国AML 的真空步进电机相匹配)4.1 电源连接如果您的电源输出端没有保险丝或一些别的限制短路电流的装置,可在电源和驱动器之间放置一个适当规格的快速熔断保险丝(规格不得超过3Amps)以保护驱动器和电源,请将该保险丝串联于电源的正极和驱动器的V+之间。
步进电机及驱动器知识-雷赛科技
二、步进驱动器简介
步进驱动器:是一种能使步进电机运转的功率放大器,能把控制器 发来的脉冲信号转化为步进电机的角位移,电机的转速与脉冲频率 成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确 定位。
电机控制原理图
1. 恒流驱动
恒流控制的基本思想是通过控制主 电路中MOSFET的导通时间,即调节 MOSFET触发信号的脉冲宽度,来达 到控制输出驱动电压进而控制电机 绕组电流的目的。
电动机构造图
转轴成平行方向的断面图
6. 步进电动机主要参数 ① 步进电机的相数:是指电机内部的线圈组数,目前常用的有
两相、三相、五相步进电机。 ② 拍数:完成一个磁场周期性变化所需脉冲数或导电状态,用m
表示,或指电机转过一个齿距角所需脉冲数。 ③ 保持转矩:是指步进电机通电但没有转动时,定子锁住转子
t 0.1
加速距离:S 1 S 0 V 0 1 2 a2 t1 2 2 .1 1 0 .1 2 0 .01 m 06 匀速距离:S 2 V m a t x0 .2 1 1 .8 1 0 .3m 80
减速距离和加速距离相同,S3S10.010m6
S S 1 S 2 S 3 0 .40 m 1
已知:直线平台水平往复运动,最大行程L=400 mm,同步带 传动;往复运动周期为T = 4s;重复定位误差 0.05 mm; 平台运动质量M = 10 kg,无外力。 求:电机型号、同步带轮直径、最大细分数。
1. 运动学计算
平台结构简图
Байду номын сангаас
平均速度为: V 0 .4 /2 0 .2m /s 设加速时间为0.1 S;(步进电机一般取加速时间为:0.1~1秒)
2. 电机定位精度的选择
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二相八线步进电机接线方法
——程国锦
一、并联接法:
以SL86S278A为例,
相电流是 4.2A。
假如:步进驱动器SL2680 驱动器的电流调到(4.2A*1.4=)5.8A 以下就可以。
步进驱动器适宜调到4.5~5.5A 之间。
这种接法适用步进电机高速运行。
二、串联接法::
1、以SL86S278A为例,
相电流是 4.2A。
接这款步进驱动器SL2680 驱动器的电流调到(4.2A/1.4=)3.0A 以下就可以。
步进驱动器适宜调到2.6A 就可。
将步进电机的A-和C二个线头并接在一起有绝缘胶纸包好(也即是AC端)。
将步进电机的B-和D二个线头并接在一起有绝缘胶纸包好(也即是BC端)。
2、假如SL86S278A步进驱动器SL2680C 驱动器的电流调到(4.2A/1.4=)
3.0A 以下就可以。
步进驱动器适宜调到2.8A 就可。
将将步进电机的A-和C二个线头并接(也即是AC端)接驱动器的AC端上,将步进电机的B-和D二个线头并接(也即是BC端)接驱动器的BC端上。
这种接法适用步进电机低速运行。