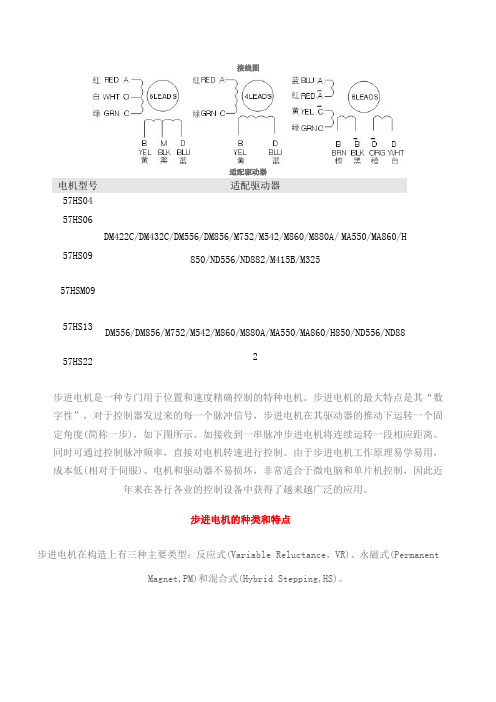
步进电机接线图
脉冲输出控制步进电机接线

无论时隔多久,我依然清楚的记着,那些年,我们曾拥有的美好。依稀记
信号的高端为公用端,与控制器的 24V 共用一个 电源,因此,Y1 和 Y2 的输出端与驱动器的输入 端之间必须串联两支 2K 欧姆的限流电阻。 注意:Y1 和 Y2 连接步进电机驱动器时必须 加接 2K 的限流电阻,参见下图,否则会损坏驱
电压或电流信号,通常将两组信号的高端并联接 到供电电压的正极,控制器输出信号接到信号的 低端(负极)。 一般驱动器输入信号为 5V,需要一个 5V 的 电源来供电,如果没有 5V 的电源就要增加供电
的复杂性。现在介绍一种可以与控制器供电共用 24V 电源的接线方法,将脉冲 PU 和方向 DR 两组 输入信号的高端并联接到 24V 正极,控制器的输 出信号通过串联 2K 电阻接到驱动器,具体接线 参见下图:
脉冲输出接线 单轴步进电机控制:参见图中的 Y1 作为脉 冲输出端,Y2 作为脉冲输出端,图中有控制器的 脉冲输出端与步进电机驱动器的具体接线原理, 脉冲输出端 Y1 连接步进电机驱动器的 PU 端,方
向控制端 Y2 连接 DR 端。驱动器必须设置为脉冲 +方向的方式,PU 端为脉冲方式,DR 端为方向控 制端。控制器的地线 EG 与驱动器的电源负极-V 相连,控制器的供电为 24V,步进电机驱动器的 电源则根据不同厂家及型号、遵照其说明书要求 连接所需的电源。图中,步进电机驱动器的输入
1ci0f6c7b 易博/
无论时隔多久,我依然清楚的记着,那些年,我们曾拥有的美好。依稀记
动器。 多轴步进电机控制: 多轴步进电机控制采用具有多路脉冲输出 的控制器,需要多轴控制的需要时选择多轴控制 器。多轴步进控制与单轴控制原理相那些年,我们曾拥有的美好。依稀记
图,图中是两轴步进控制原理图,X 轴由 Y1 输出 脉冲,Y2 作为方向控制端,Y 轴由 Y3 输出脉冲, Y4 作为方向控制端。 两轴步进控制接线原理图
步进电机接线图

步进电机接线图标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
步进电机接线图
接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
电机接线图

CREATE TOGETHER
谢谢观看
THANK YOU FOR WATCHING
DOCS
• 符号标识检查:检查接线图中的符号标识是否规范,无错误
• 接线方式检查:检查接线图中的接线方式是否与实际接线一致,无误差
修改方法
• 修改错误:发现接线图中的错误后,及时进行修改
• 优化布局:对接线图进行布局优化,提高可读性
• 更新信息:根据实际接线情况,更新接线图中的信息
04
电机接线图的分析与解读
电机接线图的分析方法与技巧
分析方法
• 绕组接线分析:分析电机绕组的接线方式,了解电机的运行原理
• 外部接线分析:分析电机外部的接线方式,了解电机的控制方式
• 电路分析:根据接线图进行电机的电路分析,了解电机的性能特点
技巧
• 熟悉电气符号:熟悉常用的电气符号,便于分析和解读
• 理解接线图:理解接线图中的电气连接关系,便于分析
• 注意接线方式:注意接线图中的接线方式,防止误读和误解
电机接线图的解读实例
• 实例
• 直流电机接线图分析:分析直流电机的绕组接线和外部接线
• 交流电机接线图分析:分析交流电机的绕组接线和外部接线
• 伺服电机接线图分析:分析伺服电机的绕组接线和外部接线
• 步进电机接线图分析:分析步进电机的绕组接线和外部接线
技巧
电机接线图的绘制步骤与注意事项
绘制步骤
• 确定电机类型:根据电机类型选择相应的接线图模板
• 绘制绕组接线:按照电机绕组的实际接线方式绘制接线图
• 绘制外部接线:按照电机外部的实际接线方式绘制接线图
• 添加注释和标识:在接线图上添加必要的注释和标识
注意事项
步进电机原理接线

2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
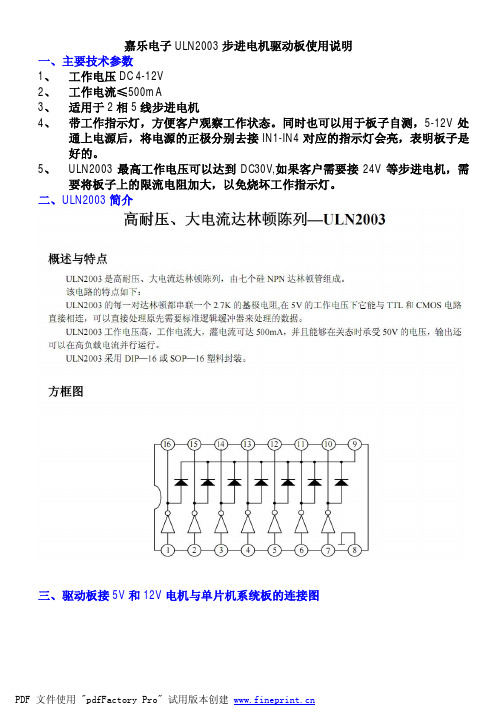
ULN2003步进电机接线图及程序

ULN2003 步进电机驱动板使用说明一、主要技术参数1、工作电压 DC 4-12V2、工作电流≤500mA3、适用于 2 相 5 线步进电机4、带工作指示灯,方便客户观察工作状态。
同时也可以用于板子自测,5-12V 处通上电源后,将电源的正极分别去接 IN1-IN4 对应的指示灯会亮,表明板子是好的。
5、 ULN2003 最高工作电压可以达到 DC30V,如果客户需要接 24V 等步进电机,需要将板子上的限流电阻加大,以免烧坏工作指示灯。
二、ULN2003 简介三、驱动板接 5V 和 12V 电机与单片机系统板的连接图四、步进电机工作方式电机可以使用单四拍、双四拍和八拍方式驱动4.1 单四拍: A-B-C-D(0001、0010、0100、1000)#include <reg52.h>unsigned char code F_Rotation[4]={0x01,0x02,0x01,0x08};//正转表格 unsigned char code B_Rotation[4]={0x08,0x04,0x02,0x01};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++)//4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001)#include <reg52.h> unsigned char codeF_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格 unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++)//4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.3 八拍方式:A-AB-B-BC-C-CD-D-DA(0001、0011、0010、0110、0100、1100、1000、1001)#include <reg52.h>sbit key=P2^0; //按键控制步进电机的方向//八拍方式驱动,顺序为 A AB B BC C CD D DAunsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};void Delay(unsigned int i)//延时{while(--i);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];Delay(500);}else //按键按下,反转{P0=clockWise[8-i];Delay(500);}}}(资料素材和资料部分来自网络,供参考。
步进马达
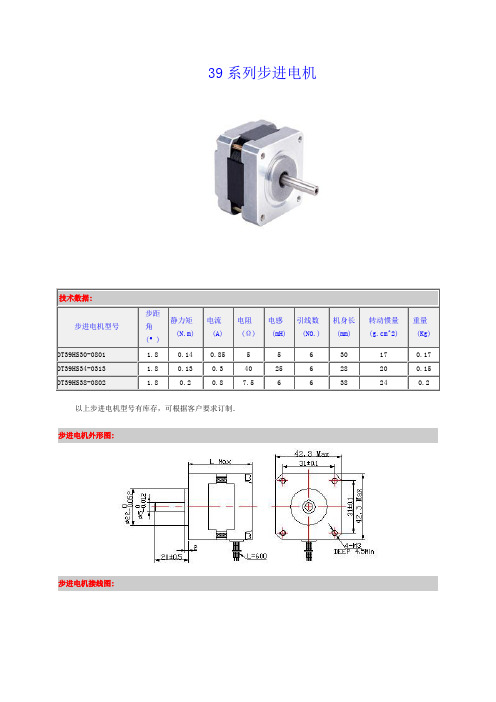
技术数据:
步进电机型号
步距角
(°)
静力矩
(N.m)
电流
(A)
电阻
(Ω)
电感
(mH)
引线数
(NO.)
机身长
(mm)
转动惯量
(g.cm^2)
重量
(Kg)
DT39HS30-0801
1.8
0.14
0.85
5
5
6
30
17
0.17
DT39HS34-0313
1.8
0.13
0.3
40
25
6
28
20
0.15
(g.cm^2)
重量
(Kg)
DT42HS30-0902
1.8
0.2
0.95
3.9
3.6
6
30
27
0.18
DT42HS40-0503
1.8
0.3
0.5
3
3
6
40
54
0.24
DT42HS40-0903
1.8
0.3
0.9
5.7
6.8
6
40
48
0.27
DT42HS48-1204
1.8
0.4
1.2
3.2
25
6
额定电流/相
(A)
相阻抗
(ohms±0%)
相感抗
(mH±20%)
长度
(mm)
转动
惯量
(g.cm^2)
重量
(Kg)
DT86HS65-4035
3.5
4.0
0.7
3.9
65
ULN2003步进电机接线图
void Delay(unsigned int i)//延时 { while(--i); }
main()
{
unsigned char i;
while(1)
{
for(i=0;i<4;i++)
//4 相
{
P1=F_Rotation[i]; //输出对应的相 可以自行换成反转表格
Delay(500);
//改变这个参数可以调整电机转速
//八拍方式驱动,顺序为 A AB B BC C CD D DA
unsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};
void Delay(unsigned int i)//延时 { while(--i); }
三、驱动板接 5V 和 12V 电机与单片机系统板的连接图
PDF 文件使用 "pdfFactory Pro" 试用版本创建
四、步进电机工作方式 电机可以使用单四拍、双四拍和八拍方式驱动 4.1 单四拍: A-B-C-D (0001、0010、0100、1000) #include <reg52.h>
}
}
}
4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001) #include <reg52.h>
unsigned char code F_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格
unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格
}