ADAMS几何建模与修改上机实验二
ADAMS参数化建模及优化设计 2PPT课件
系统环境设置
工作平面设置:进入菜单 settings working grid…, 在弹出对话框中选择Gloab XZ在主工具箱,点击视图 设置
单位设置 :菜单Settings— >Units,选择MMKS
消息窗口设置 :菜单View ->Message Window,在 弹出对话框中点击左下角按 钮Setting,选择Error。
万向节的创建
进入“Command Navigator”对话框, 展开“constraint”、“joint”,双击 “hook”。弹出创建对话框,在下拉 菜单中选择“Position By Using Markers”,通过Marker来为铰定向。
I Marker Name编辑框中右击选择 “Marker”、“Create”,弹出创建 Marker对话框,先创建属于地面的I Marker,Z轴为水平方向.改名为 “model_1.tierod.MARKER41”,在 “Location”中选择点tierod_middle, 菜单中选择“Along Axis Orientation”,选择点hookref。点击 “OK”。
在Joint Name中选择测试台上的平 移铰,在自由度类型下拉菜单中选 择“translational”。
点击“OK”。
参数化分析方法
设计研究 试验设计 优化设计
设计研究步骤
定义设计变量 定义测计变量
关闭对话框后回到创建几何实 体对话框,在“Radius”编辑栏 中输入15,点击“OK”,则几 何体创建成功
模型部件列表
模型示意图
约束的创建
进入“Command Navigator”对话框,展开 “constraint”、“joint”, 双击“spherical”。
adams实验报告
ADAMS动力学建模与分析实验报告实验一、曲柄连杆机构、凸轮机构建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立曲柄连杆机构和凸轮机构的动力学模型,仿真其运动。
二、实验流程(一)、曲柄连杆机构1、启动Adams,设置文件名为“qubingliangang”,进入工作界面,设置菜单栏中setting |working grid,将size栏中的x和y 都设置为300mm,将spacing栏中的x和y都输入5mm,按F4,打开坐标显示框;2、创建曲柄,单击Link,设置数值为9cm*1cm*1cm,单击(0,0,0)处,向右拉伸,单击鼠标。
3、创建摇杆,单击回转图标,单击(0,0,0)和(-120,0,0),设置回转中心线,之后鼠标分别点击(0,5,0),(0,10,0),(-120,10,0),(-120,5,0),(0,5,0),单击鼠标右键,完成;4、创建活塞,单击圆柱创建图标,设置长度和半径分别为21cm和0.5cm,在(0,0,0)处单击,向左延伸。
5,在各铰接点处添加转动副,在摇杆与活塞之间创建圆柱幅,在曲柄上添加动力,设置其转动速度为60r/s,则建模完成;6、单击仿真按钮,设置Duration 为5,Step size为0.0001,单击开始,则可以观察到运动仿真结果,如下所示:(二)、凸轮机构1、启动Adams,设置文件名为“tulun”,进入工作界面,设置菜单栏中setting |working grid,将spacing栏中的x和y都输入10mm,按F4,打开坐标显示框;2、创建凸轮,单击多义线图标,选中下面的closed选项,绘制封闭的多义线,依次点击凸轮外表面上的13个点,选择完毕后单击右键生成凸轮曲线。
然后在(0,-130,0)处创建凸轮转动副;3、创建平动部件,单击多义线图标,取消下面的closed选项,绘制不封闭的多义线,选择该曲线上的11个点,选择完毕后单击鼠标右键,生成该曲线;然后单击BOX图标,在下方的选项中选择Add to part,鼠标点击开放的曲线,之后定义盒子的顶点为(-250,50,0),按住鼠标拖动至(250,180,0),释放鼠标,则可建成平动部件;4、在平动部件与地面之间添加移动副;5、单击凸轮接触图标,点击凸轮部件,再单击其他部件曲线部分,建立线-线接触;6、给凸轮添加旋转运动,speed设置为360d;7、分别建立平动部件的位移测量、速度测量和加速度测量;如下图所示为实验结果:实验二、保龄球运动、平抛运动建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立平抛运动和保龄球运动的动力学模型,仿真其运动。
ADAMS实验报告

ADAMS动力学建模与分析实验报告班级:姓名:学号:页脚内容12013年12月31 日页脚内容2实验一、空间曲柄——滑块机构运动学建模与仿真一、实验目的:1、熟悉ADAMS操作界面,掌握简单几何实体、转动铰、转动函数施加、直线运动约束等基本建模方法,熟练建模操作流程;2、建立空间曲柄——滑块机构运动学模型,进行仿真,获得仿真运动后处理结果。
二、实验要求:1、提交空间曲柄——滑块机构仿真建模流程、仿真模型及其后处理仿真结果曲线。
三、建模与仿真操作流程:结构图:页脚内容3曲柄OA和连杆AB长分别为0.08m和0.03m,曲柄OA作定轴转动,转动轴平行于x轴,角速度矢量沿x的负向,大小为sradw/2π=。
曲柄OA和连杆AB通过球铰连接,连杆AB和划款C在点B通过万向节连接,垂直轴分别为连杆AB的连体矢量m和支座的连体矢量n。
点B与滑块中心C重合。
滑块的滑槽沿x轴。
初始时刻,点O,点A、点B的坐标分别为O(0,0,0),A(0,0.08,0),B(0.2,-0.12,0.1),连体矢量m在公共基上的坐标阵为(0,-1,-2)/5。
要求计算滑块速度和加速度随时间的变化规律,并绘制曲线图。
主要步骤:1、建立刚体构件(1)、建立建立4各主要点(2)、建立连B1,B22、建立运动副和驱动约束(1)、建立转动铰o页脚内容4(2)、B1B2建立球铰A(3)、B2建立点线约束(4)、B2建立垂直约束(5)、在o处加转动铰滑块水平方向速度图:页脚内容5滑块水平方向加速度图:实验总结:学习掌握了ADAMS的使用,认识ADAMS在机械运动学仿真中的运用,模型的建立,约束的添加,驱动的添加以及实验结果的分析。
实验二、平面机械手运动学建模与仿真页脚内容6一、实验目的:1、熟练ADAMS操作,掌握复杂几何实体、固定铰、转动铰、直线运动施加等建模方法;2、建立平面机械手运动学模型,进行仿真,得出仿真运动后处理结果。
二、实验要求:1、提交平面机械手仿真建模流程、仿真模型及其后处理仿真结果曲线。
ADAMS操作与实例解析
ADAMS操作与实例解析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的机械系统动力学仿真与分析软件,可以用于模拟和优化各种机械系统,包括汽车、飞机、船舶、机械臂等。
在这篇文章中,将介绍ADAMS的操作流程以及一些实例解析。
1.建模:ADAMS提供了丰富的建模工具,可以通过创建零件模型来构建机械系统的模型。
用户可以直接导入CAD文件或者通过ADAMS的建模工具手动创建零件模型。
在建模过程中,用户需要定义每个零件的几何特征和物理性质。
2.装配:在建模完成后,需要对所有的零件进行装配操作。
用户可以使用简单的拖拽操作将零件放置到正确的位置,并设置它们之间的连接关系。
ADAMS提供了多种连接方式,包括球接头、铰接、滑动接头等。
3.定义运动:一旦完成了装配操作,用户需要为机械系统定义运动。
ADAMS支持多种运动方式,包括平移、旋转、摆动等。
用户可以通过设置零件的运动公式或者直接拖动零件使其运动。
4.分析:定义了机械系统的运动后,可以进行多种分析,如运动模拟、动力学分析、碰撞检测等。
ADAMS提供了丰富的分析工具和图表,可以帮助用户研究机械系统的性能和优化设计。
接下来,将通过两个实例来解析ADAMS的应用。
实例一:汽车悬挂系统分析假设我们要分析一种新型的汽车悬挂系统的性能。
首先,我们需要在ADAMS中建立一个悬挂系统的模型,包括车轮、悬挂臂、弹簧等零件。
然后,通过调整零件的连接关系和运动方式,定义悬挂系统的运动。
接着,我们可以进行动力学分析,如行驶过程中的减震性能测试、路面不平度下的车辆响应等。
通过观察ADAMS提供的图表和动画,我们可以评估悬挂系统的性能,并优化设计。
实例二:机器人臂运动规划假设我们要设计一个机械臂,能够完成复杂的运动任务,如抓取物体、放置物体等。
首先,我们需要建立机械臂的模型,包括关节、链接件等零件,并设置它们之间的运动关系。
ADAMS参数化建模及优化设计
ADAMS参数化建模及优化设计ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的参数化建模和优化设计软件,广泛应用于机械系统的动力学模拟和优化。
本文将针对ADAMS的参数化建模和优化设计进行详细探讨。
参数化建模是指将机械系统的设计参数进行编程和建模,实现系统的变量化描述。
ADAMS软件提供了强大的参数化建模功能,可以对系统的几何形状、材料属性、运动约束等进行参数化描述。
通过参数化建模,工程师可以灵活地调整系统的参数,快速验证不同设计方案的性能差异,为优化设计提供重要的支持。
在ADAMS中,参数化建模可以通过两种方式实现:一种是基于CAD几何模型进行建模,另一种是基于ADAMS内置的建模工具进行建模。
对于基于CAD几何模型的建模,工程师可以直接导入CAD文件,然后通过ADAMS 提供的工具对几何模型进行进一步处理,添加运动约束和物理特性等。
而基于ADAMS内置的建模工具进行建模,工程师可以通过简单的拖拽和参数调整就能够快速构建机械系统模型。
参数化建模之后,就可以进行系统的优化设计了。
ADAMS软件提供了多种优化方法和算法,如遗传算法、粒子群算法、单目标优化、多目标优化等。
工程师可以根据具体需求选择适合的优化方法,通过设定优化目标和约束条件,对系统进行优化设计。
在进行优化设计时,需要定义目标函数和约束条件。
目标函数是指系统的优化目标,可以是最小化系统一些性能指标,如最小化系统的质量、最小化系统的振动等。
约束条件是指系统设计必须满足的条件,如材料的强度、系统的尺寸约束等。
通过设置合适的目标函数和约束条件,ADAMS 可以自动寻找最优的设计方案。
在进行参数化建模和优化设计时1.系统的参数化建模应该尽可能准确地反映实际情况,避免过度简化或者误差过大。
2.在进行优化设计时,应该明确优化的目标和约束条件,以及优化的范围和限制。
3.在优化设计过程中,可能需要进行多次的仿真和优化迭代,直到找到最优的设计方案。
ADAMS上机练习2

图
2
图 5
图4
ADAMS 上机练习2 施加约束与力的基本操作
1. 对图1所示的两杆件,用铰链相连,最上杆件上端与地用
铰链相连。
分别用1位置、2 Bod-1 Loc 、2 Bod-2 Loc;
Normal to grid 和Pick Feature 等方法。
2. 构建如图2所示的机构,两铰链轴互相垂直,施加1 回
转运动于下铰链,进行仿真。
3. 构建一对万向联轴节(Universal joint ),连接两不平行的
轴,在第一轴上加匀速回转运动,建立两个轴的转角测量,
仿真观看其关系。
4. 构建一对圆柱齿轮,在主动轮上施加一回转运动,建立两轮转角的测量进行仿真。
5. 构建两个定轴转动的轮子,用耦合副连接,施加一转动于主动轮,建立两轮转角
的测量,进行仿真,改变耦合比,观看其变化。
再建立主动轮与一滑动副的耦合,
进行仿真。
6. 构建一如图3的平面回转凸轮和移动从动杆,建立Point-to-curve 凸轮副,进行仿
真。
7. 做一个如图4所示的拉伸体和一个球,拉伸体固定于地面,在球与拉伸体间建立沿斜面的滑动副,进行仿真。
删去滑动副,在球与拉伸体间建立Solid-to-Solid 的接触,进行仿真。
8. 做如5所示的球-弹簧阻尼器系统,在不同刚度、阻尼系数、预载条件下进行仿真。
求系统的固有频率。
再对球加一个垂直方向的滑动副,进行仿真比较。
图
3 图1。
ADAMS上机教师用本_附参考答案

《系统动力学与仿真》上机实验指导书参考答案班级:姓名:学号:上机总成绩:使用说明1.填上相应的班级、姓名及学号,将1-11页正反面打印(封面单独打印),在相应部分填上答案后装订好(左边装订)。
2.因上机时间有限,每次上机前,请提前预习。
3.上机报告计入平时成绩。
武汉科技大学机械自动化学院冶金机械教研室2009年11月上机实验一:ADAMS/View的界面和工作环境上机日期:一、ADAMS/View的工作界面主工作界面由以下七个部分组成。
1. 标题栏:显示ADAMS的功能模块名字及版本信息;2. 主菜单:采用Windows风格的主菜单。
3. 快捷工具栏:设置了一些最基本的文件和编辑命令的快捷按钮,其设置如下:单击主菜单View/Toolboxs and Toolbars ,显示界面设置对话框,。
选择Standard Toolbar。
中包括:①“斜向左上的箭头,选择”按钮:有两个功能:工作屏幕中用矩形窗口选择图形对象、清空选择集中的图形对象。
②“油漆桶”按钮:用于设置设置构件的颜色。
该按钮的右下角有一个小三角形的图标,表示这是一个命令集合。
将鼠标移至该图标,按下右键,可以弹出该命令集合对应的子工具箱。
③“X-Y ”图标命令集:改变观察方向。
共有7个不同的观察方向,包括主视图(前视图)、后视图、左视图、右视图、俯视图、顶视图、轴侧视图。
4. 主工具箱:分为两部分,上部为12类常用命令的快捷图标;下部为相应命令图标的参数设置窗口;特别的,若当前命令是“选择”时,下部是各种视图控制图标。
12类常用命⏹视图位置控制图标:⏹视图位置控制命令的快捷键:平动模型:T键+鼠标左键;沿XY面上某轴线旋转模型:R键+鼠标左键;动态缩放模型:Z键+鼠标左键;最佳视图:F键或Ctrl+F键;沿着垂直于屏幕的轴线旋转:S键+鼠标左键;放大视图:W键+鼠标左键;定制旋转中心:C键+鼠标左键。
⏹视图方向控制按钮:⏹其它视图工具按钮:,分别是背景色设置图标命令集、“坐标操作”图标命令集、多视图图标命令集。
上机实验二(续新) ADAMS几何建模与修改
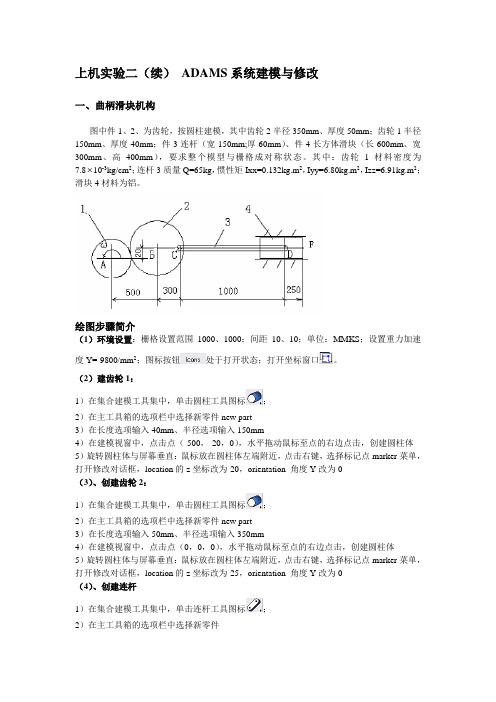
上机实验二(续)ADAMS系统建模与修改一、曲柄滑块机构图中件1、2、为齿轮,按圆柱建模,其中齿轮2半径350mm、厚度50mm;齿轮1半径150mm、厚度40mm;件3连杆(宽150mm;厚60mm)、件4长方体滑块(长600mm、宽300mm、高400mm),要求整个模型与栅格成对称状态。
其中:齿轮1材料密度为7.8 10-3kg/cm2;连杆3质量Q=65kg,惯性矩Ixx=0.132kg.m2,Iyy=6.80kg.m2,Izz=6.91kg.m2;滑块4材料为铝。
绘图步骤简介(1)环境设置:栅格设置范围1000、1000;间距10、10;单位:MMKS;设置重力加速度Y=-9800/mm2;图标按钮处于打开状态;打开坐标窗口。
(2)建齿轮1:1)在集合建模工具集中,单击圆柱工具图标;2)在主工具箱的选项栏中选择新零件new part3)在长度选项输入40mm、半径选项输入150mm4)在建模视窗中,点击点(-500,-20,0),水平拖动鼠标至点的右边点击,创建圆柱体5)旋转圆柱体与屏幕垂直:鼠标放在圆柱体左端附近,点击右键,选择标记点marker菜单,打开修改对话框,location的z坐标改为-20,orientation 角度Y改为0(3)、创建齿轮2:1)在集合建模工具集中,单击圆柱工具图标;2)在主工具箱的选项栏中选择新零件new part3)在长度选项输入50mm、半径选项输入350mm4)在建模视窗中,点击点(0,0,0),水平拖动鼠标至点的右边点击,创建圆柱体5)旋转圆柱体与屏幕垂直:鼠标放在圆柱体左端附近,点击右键,选择标记点marker菜单,打开修改对话框,location的z坐标改为-25,orientation 角度Y改为0(4)、创建连杆1)在集合建模工具集中,单击连杆工具图标;2)在主工具箱的选项栏中选择新零件3)在长、宽、厚选项分别输入1000mm、150mm、50mm4)在建模视窗中,选择点(300,0,0),然后在右侧横坐标轴上选择一点,定义连杆方向,创建连杆(5)、创建滑块1)在集合建模工具集中,单击工具图标;2)在主工具箱的选项栏中选择新零件3)在长、高、厚选项分别输入600mm、300mm、400mm4)在建模视窗中,选择点(1000,150,0),创建滑块5)移动长方体与栅格对称,轴对称显示模型:鼠标放在长方体左上端附近,点击右键,选择标记点marker菜单,打开修改对话框,location的z坐标改为-200(6)、创建点F1)在集合建模工具集中,单击点工具图标;2)在主工具箱的选项栏中选择添加到零件上add to part3)在建模视窗中,先点击长方体滑块,再选择点(1550,0,0),点击右键4)鼠标放在长方体左后端附近,点击右键,打开修改点对话框,z坐标改为-50(7)修改零件物理特性(1)鼠标放在连杆3上,点击右键,依次选择part-,modify, 打开修开对话框(2)在category 中选择mass properties;在define mass by中选择user input(3)在mass、Ixx、Iyy、Izz中分别输入连杆质量60kg、惯性矩0.132Hz、0.68Hz、0.691Hz,点击ok退出修改对话框。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上机实验二 ADAMS几何建模与修改
一、上机目的
练习操作简单零件的建模、线连接、布尔操作、修饰及修改。
二、上机内容和要求
通过本次上机,绘制如图所示的平面图形和系统简图,进一步掌握在ADAMS中进行零件绘制的基本操作,绘制方法,文件的存盘和打开等等。
带孔平板
创建带孔平板
(1)下拉菜单setting(设置)——working grid(工作栅格)中,将x、y轴栅格间距改为
10mm,按下F4打开坐标窗口,在建模菜单栏中,单击基本形状栏中圆弧工具图标;(2)在左侧的选项栏设置中选择新建部件
(3)选中半径项输入80mm、起始角度输入0,终止角度输入120;
(4)在建模窗口中,选择点(0,0,0),然后拖动鼠标使圆弧以y轴对称,松开鼠标创建圆弧线;
(5)在建模菜单栏中,单击基本形状栏中多段线工具;
(6)在左侧的选项栏设置中选择新建部件,并取消闭合选项
(7) 在绘图窗口中选中圆弧右端点,拖动鼠标至点(250,-350,0)点击左键,再拖动鼠标依次至点(250,-410,0),(-250,-410,0),(-250,-350,0),至圆弧左端点,点击右键完成多段线创建;
(8)在布尔操作中,单击将首尾相连的构造线连成一条线图标;
(9)在绘图窗口中依次选择圆弧、多段线,点击右键完成线相连;
(10)在基本形状中,单击圆弧工具图标,选中圆;
(11)在左侧的选项栏中选择新建部件;选中半径:输入数据40
(12)在绘图窗口中,选择点(0,0,0)单击左键,完成绘制圆
(13)在实体栏中,单击拉伸工具;
(14)在左边参数设置部分依次选择:新建部件; 曲线; 圆心; 70mm,并取消分析选项;
(15)在绘图窗口中点击前面完成的相连的线,完成平板拉伸
(16)再次选择拉伸工具
(17)在参数设置部分依次选择:新建部件、曲线、圆心、100mm,并取消分析选项;
(18)在窗口中鼠标左键选中前面完成的圆轮廓线,完成圆柱拉伸建模
(19)删除辅助建模拉伸的多段相连的线和圆轮廓线
平板上挖孔
(20)在布尔操作栏,单击用一个实体切割另一个实体图标,依次选择拉伸后的平板、圆柱体,点击右键,完成挖空操作。
(22) 模型建完后,选择仿真,打开仿真对话框,选择终止时间1s,步数100,对所建模型仿真检验
保存文件为shiyan2_1在G:\jixie114/201473377,退出adams/view。