840D常用编程实例
西门子840d工厂编程实例

目录第一章基础知识 (1)1.1西门子840D系统程序命名规则 (1)1.2 快速定位指令 G00(模态指令) (1)1.3直线插补指令 G01(模态指令) (2)1.4 圆弧插补 G02/G03(模态指令) (2)1.5 暂停指令 G04 (模态指令) (4)1.6 准确停止 G09 (非模态指令)、G60(模态指令) (4)1.7 G17、G18、G19 加工平面选择(模态指令) (4)1.8 G40、G41、G42刀具半径补偿(模态指令) (5)1.9 G53、G153、SUPA(非模态指令) G500(模态指令) (5)1.10 G54~G57、G505~G599工件坐标系(模态指令) (6)1.11 G64/G641 连续路径加工(模态指令) (7)1.12 G70/G71/G700/G710英制/公制(模态指令) (7)1.13 G90/G91绝对/增量尺寸(模态指令) (7)1.14 G94/G95 进给单位(模态指令) (8)1.15 G110、G111、G112极坐标(非模态指令) (8)1.16 FRAME框架指令(非模态指令): (9)1.17 辅助功能和部分指令 (11)1.18算术参数R与程序跳转GOTO (12)1.19子程序 (14)1.20程序段重复REPEATB与REPEAT (15)第二章测量与赋值 (18)2.1测量循环概要CYCLE977 、CYCLE978 (18)2.2供给参数 (19)2.3结果参数 (22)2.4参数的赋值$P_UIFR (25)第三章标准循环 (28)3.1钻孔循环CYCLE81 (28)3.2钻孔循环CYCLE82 (28)3.3钻深孔循环CYCLE83 (29)3.4刚性攻丝螺纹循环CYCLE84 (29)3.5柔性攻丝螺纹循环CYCLE840 (30)3.6精镗孔循环CYCLE86 (30)3.7射线性排列孔的钻孔循环HOLSE1 (31)3.8圆周排列孔的钻孔循环HOLES2 (31)第四章编程实例 (32)4.1平面钻孔实例 (32)4.2椭圆加工实例 (35)4.3圆柱表面加工 (37)4.4铣圆弧面加工 (39)4.5钻孔攻丝实例 (41)4.6镗孔实例 (43)4.7背铣实例 (44)4.8深孔加工实例 (46)4.9坐标系旋转加工 (48)4.10 成排孔加工 (50)4.11倒角编程实例 (52)4.12倒圆角编程实例 (54)4.13镜像编程实例 (55)4.14凸轮加工实例 (57)4.15腔体加工实例 (58)4.16综合加工实例(一) (59)4.17综合加工实例(二) (61)4.18综合加工实例(三) (63)4.19综合加工实例(四) (65)4.20综合加工实例(五) (67)附录西门子840d出口版本 (69)计算变量 (69)用户定义变量 (69)运算符 (70)无限程序循环LOOP (71)计数循环FOR (71)在循环开头带有条件的程序循环WHILE (71)在循环结尾带有条件的程序循环REPEAT (72)轴使能: RELEASE (73)轴接收: GET (73)轴直接接收: GETD (73)模态子程序:MCALL (74)间接调用子程序CALL (75)调用带路径说明和参数的子程序:PCALL 编程 (75)第一章基础知识1.1西门子840D系统程序命名规则a、前一个符号必须是字母或数字(或一个字符有下划线)b、其余符号可以是字母、数字及下划线c、程序名最多有24个字符d、字符间不允许使用分隔符常见程序段格式N…G…X…Y…Z…F…S…D…T…M…说明N… 程序段号G… 准备功能X…Y…Z… 坐标终点F… 进给速度S… 主轴转速D… 刀沿号T… 刀具号M… 辅助功能1.2 快速定位指令 G00(模态指令)格式G0 X… Y… Z …G0 AP=… RP=…解释X Y Z 直角坐标的终点AP= 极坐标的终点,这里指极角 (下面章节具体介绍极角用法)RP= 极坐标的终点,这里指极半径(下面章节具体介绍极半径用法)指令用途快速运行进行刀具的快速定位,工件的绕行或者返回换刀位置。
西门子840D G指令精编版

840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
SIEMENS840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
西门子840D G指令

840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
SIEMENSSINUMERIK840D系统参数编程

SINUMERIK系统参数编程一计算参数R1.功能要使一个NC程序不仅仅适用于特定数值下的一次加工,或者必须要计算出数值,两种情况均可以使用计算参数,你可以在程序运行时由控制器计算或设定所需要的数值;可以通过操作面板设定参数数值。
如果参数已经赋值,则它们可以在程序中对由变量确定地址进行赋值。
2.编程R0=...到R249=...3.说明一共250个计算参数可供使用。
R0...R99 - 可以自由使用R100...R249 -加工循环传递参数如果你没有用到加工循环,则这部分计算参数也同样可以自由使用。
4.赋值举例一:R0=3.5678 R1=-37.3 R2=2 R3=-7 R4=-45678.1234用指数表示法可以赋值更大的数值范围:(10-300...10+300).指数值写在EX符号之后;最大符号数:10(包括符号和小数点).EX值范围:-300到+300举例二:R0=-0.1EX-5 ;意义:R0=-0.000 0001R1=1.874EX8 ;意义:R1=187 400 000注释:一个程序段中可以有多个赋值语句;也可以用计算表达式赋值。
5.给其他的地址赋值通过给其它的NC地址分配计算参数或参数表达式,可以增加NC程序的通用性。
可以用数值、算术表达式或R参数对任意NC地址赋值。
但对地址N、G和L例外。
赋值时在地址符之后写入符号“=”赋值语句也可以赋值-负号。
给坐标轴地址(运行指令)赋值时,要求有一独立的程序段。
举例:N10 G0 X=R2 ;给X轴赋值6.参数的计算在计算参数时也遵循通常的数学运算规则。
原括号内的运算优先进行。
另外,乘法和除法运算优先于加法和减法运算。
二标记符――程序跳转目标1.功能1)标记符用于标记程序中所跳转的目标程序段,用跳转功能可以实现程序运行分支。
2)标记符可以自由选取,但必须由2一个字母或数字组成,其中开始两个符号必须是字母或下划线。
3)跳转目标程序段中标记符后面必须为冒号。
SIEMENS_840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
西门子840d数控编程实例一本通

30RMB本书为工厂内部培训资料,页面为A4大小,市面上没有出售,如有需要请提前预定QQ:574164352旺旺:zhizunzhangdalong说明SINUMERIK 840D 是西门子数控产品的突出代表。
于20世纪90年代推出。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
它在复杂的系统平台上,通过系统设定而适于各种控制技术。
SINUMERIK 840D数控系统适用于几乎所有的应用,可实现灵活组网,发挥机床及生产线最大效力,高度开放的HMI和NCK能满足不同客户的个性化需求,无论是各种用户定制画面,还是专有技术、特殊工艺均能轻松与系统无缝连接。
利用完善的SINUMERIK MDynamics (3轴/5轴)铣削工艺包、优异的同步功能,80位浮点数纳米(NANOFP)计算精度、空间补偿系统(VCS)等创新技术的应用使机床性能更胜一筹,实现最佳的加工质量。
可以说西门子系统在中国得到了广泛的运用,尤其SINUMERIK 840D数控系统以高端的性能而赢得使用者的好评本笔记以PAMA机床为例,通过整理筛选以往的实际加工零件,笔者终于完成了本书的制作,本书总结的例题皆为实际加工案例,不同于学校的教科书,只要用心学习,不出多日读者自己便可熟练的编程本笔记适合初学者使用,每个程序后面都有详细的指令用法及含义解释,为笔者多年的经验总结。
由于笔者水平有限,书中难免有不足之处,欢迎读者批评指出。
祝读者早日掌握编程技术,步步高升。
编者2011年8月目录第一章基础知识 (5)1.1西门子840D系统程序命名规则 (5)1.2 快速定位指令 G00(模态指令) (5)1.3直线插补指令 G01(模态指令) (6)1.4 圆弧插补 G02/G03(模态指令) (7)1.5 暂停指令 G04 (模态指令) (8)1.6 准确停止 G09 (非模态指令)、G60(非模态指令) (8)1.7 G17、G18、G19 加工平面选择(模态指令) (9)1.8 G40、G41、G42刀具半径补偿(模态指令) ..................................... 错误!未定义书签。
西门子840D编程学习之欧阳数创编
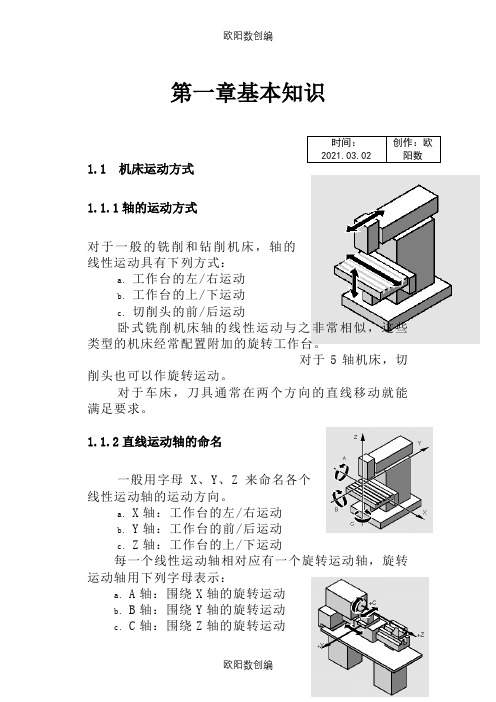
时间:2021.03.02 创作:欧阳数第一章基本知识1.1 机床运动方式1.1.1轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a.工作台的左/右运动b.工作台的上/下运动c.切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2直线运动轴的命名一般用字母X、Y、Z来命名各个线性运动轴的运动方向。
a.X轴:工作台的左/右运动b.Y轴:工作台的前/后运动c.Z轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动轴,旋转运动轴用下列字母表示:a.A轴:围绕X轴的旋转运动b.B轴:围绕Y轴的旋转运动c.C轴:围绕Z轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X轴,刀具的纵向运动通常叫作Z轴。
1.1.3刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X方向移动100mm,或者说是刀具相对于工件在X方向移动100mm。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
1.2.2位置定义为了定义一个位置,假定沿着坐标轴遵循一定的规则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用Φ200铣刀加工900×2000平面XPMN05 G00 G17 G54 G90 Z200 N10 X-110 Y90N15 M3 S150 F500/N20 GOTOF AAAN25 Z4N30 G01 X2000N35 Y270N40 X0N45 Y450N50 X2000N55 Y630N60 X0N65 Y810N70 X2000 N75 G00 Z100N80 X-110 Y90 AAA:Z0N85 G01 X2000N90 Y270N95 X0N100 Y450N105 X2000N110 Y630N115 X0N120 Y810N125 X2000N130 G00 Z100 M05 N135 M02图17利用无限循环,使用Φ200铣刀加工900×2000平面XPM1N05 G00 G17 G54 G90 Z200N10 X-110 Y90N15 M3 S150 F500N20 Z4N25 AAA: G01 X2000N30 Y=IC(180)N35 X0N40 Y=IC(180)N45 GOTOB AAAN50 M02图18(2)条件转向条件语句形式为:“IF 条件表达式 GOTOB/GOTOF 跳转标记名”。
当条件满足,程序将会跳转到指定的目标。
条件表达式所用的条件运算符包括: ==(等于)、<>(不等于)、>(大于)、>=(大于等于)、<(小于)、<=(小于等于)、AND 与、OR 或、NOT 非、XOR 异或。
例如:使用变量编程加工抛物线 Y=0.5X2图19PWXR1=10G00 G54 G90 Z100X10 Y50M3 S1000 F200Z0AA: R1=R1-0.1G01 X=R1 Y=POT(R1)/2 IF R1>-10 GOTOB AA G00 Z100 M5M02左下角为:X0、Y0 上面为:Z0Φ20铣刀加工螺旋铣孔XK N05 T1N10 G00 G54 G90 Z200N15 M03 S2000 F500; 1N20 TRANS X100 Y100N25 R1=35N30 XK1N35 TRANS; 2N40 TRANS X100 Y900N45 R1=35N50 XK1N55 TRANS; 3N60 TRANS X750 Y900 N65 R1=30N65 XK1N70 TRANS; 4N75 TRANS X750 Y100 N80 R1=30N85 XK1N90 TRANS; 5 TRANS X1400 Y100N100 R1=25N105 XK1N110 TRANS; 6TRANS X1400 Y900N120 R1=25N125 XK1N130 TRANSG00 Z200 M05M02子程序XK1X0 Y0Z5G01 G41 X19 D1Z0G03 X19 Y0 Z-20 I-19 J0 TURN=9G03 I-19G01 G40 X0G00 Z5G01 G41 X=R1 D1Z0G03 X=R1 Y0 Z-20 I= -R1 J0 TURN=9G03 I= -R1G01 G40 X0G00 Z200M17ZK(钻孔)N05 G00 G54 G90 Z100N10 X0 Y0N15 M03 S500 F100N20 MCALL CYCLE83(100,0,5,-55,,-8,,2,,,1)N25 HOLES2(0,0,300,100,10,35)N30 MCALLN35 G00 Z100 M05M02GS(攻丝)N05 G00 G54 G90 Z100N10 X0 Y0N15 M03 S50 F125N20 MCALL CYCLE840(100,0,5,-55,,,4,3,1)N25 HOLES2(0,0,300,100,10,35)N30 MCALLN35 G00 Z100 M05M02椭圆参数方程:X=30×COS(Θ) Y=20×SIN(Θ)程序如下O0001R1=0N005 G00 G54 G90 Z100N010 X60 Y0N015 M03 S600 F500N020 Z-5N025 G42 X45 Y-15N030 G02 X30 Y0 CR=15AA: R1=R1+1N035 G01 X=30*COS(R1) Y=20*SIN(R1)N040 IF R1<360 GOTOB AAN045 G02 X45 Y15 CR=15 N050 G00 G40 X60 Y0N055 Z200 M05M30G54 X0 Y0 孔中心,Z0 上表面。
R4:角度变量(0°~90°)X=17-COS(R4)*6Z=6*(SIN(R4)-1)程序DYJ(倒圆角)N05 R4=0N10 G00 G54 G90 Z100N15 X0 Y0N20 Z3 M03 S4000 F1000AA:R4=R4+2N25 G01 Z=6*(SIN(R4)-1)N30 X=17-COS(R4)*6N35 G02 I= COS(R4)*6-17 N40 IF R4<90 GOTOB AAN45 G00 Z100 M05N50 M02程序(使用变量)DYJ(倒圆角)R1=倒角孔直径R2=倒角圆半径R3=刀半径R4=角度变量N05 G00 G54 G90 Z200N10 X0 Y0N15 Z3 M03 S4000 F2000AA:R4=R4+2N20 G01 Z=(SIN(R4)-1)*(R2+R3)N25 X=R1/2+R2-COS(R4)*(R2+R3)N30 G02 I=COS(R4)*(R2+R3)-R1/2-R2 N35 IF R4<90 GOTOB AAN40 G00 Z100 M05M02XYZN05 T1 G17N10 R1=0.01 R2=0N15 G00 G54 G90 Z100 N20 X40 Y0N25 Z=R2N30 M3 S2000 F1000 AA: G01 G42 X=R1 D1N35 G03 I-R1N40 R1=R1+0.5 R2=R2-1 N45 G40 G01 X=40 Z=R2 N50 IF R1<25 GOTOB AA N55 G00 Z100 M5M02设定;Φ20中心为X0、Y0。
25尺寸右端为Z0。
使用Φ20、R0.8平面铣刀加工。
程序:AAAN05 T1N10 G00 G54 G90 Z100N15 X0 Y0N20 M03 S3000 F500N25 Z5N30 G01 G41 X10 Y0 D1N35 Z0N40 G02 X10 Y0 Z-15 I-10 J0 TURN=14 N45 I-10N50 G01 G40 X40N55 Y5N60 R1=0 BB:R1=R1+0.5N65 Z=-15-COS(R1)×10N70 G01 G41 X=10+SIN(R1)×10 D1 N75 Y0N80 G02 I=-10- SIN(R1)×10N85 G01 Y-5N90 G40 X40N95 Y5N100 IF R1<90 GOTOB BBN105 G00 Z100 M05M02SRN05 R1=10(圆半径)N10 R2=4(刀半径)N15 R3=30(坐标旋转)N20 R10=0 (变量)N25 G00 G19 G54 G90 Z200 N30 ROT Z=R3N35 X101 Y=-R1-R2N40 M3 S2000 F1500N45 Z=R1+5N50 G01 Z=-R2II:R10=R10-0.2N55 G01 X=101+R10N60 G02 Y=R1+R2 CR=R1+R2 N65 R10=R10-0.2N70 G01 X=101+R10N75 G03 Y=-R1-R2 CR=R1+R2 N80 IF R10>=0 GOTOB II N85 ROTN90 G00 G17 Z200 M05M02DYJN05 T1N10 R1=30 R2=2 R3=4 R4=0N20 G00 G54 G90 Z200N25 X=R1+R3+3 Y5N30 M03 S3000 F2000N35 Z2AA:R4=R4+1.5N40 $TC_DP6[1,1]=(R3+R2)×COS(R4)-R2 N45 G01 Z=(R2+R3)×(SIN(R4)-1)N50 G42 X=R1 D1N55 Y20N60 G03 X20 Y30 CR=10N65 G01 X0N70 Y0N75 X30N80 Y5N85 X=R1+$TC_DP6[1,1]N90 IF R4<=90 GOTOB AAN95 G00 Z200 M05M02QQQN05 CFTCPN10 R1=0N15 G00 G54 G90 G64 Z100 N20 X60 Y-60N25 M03 S3000 F2000AB:R1=R1+3N30 R2=SIN(R1)×6N35 R3=COS(R1)×6N40 $TC_DP6[1,1]=(R2-2)N45 G01 Z=R3-6N50 G42 X34 D1 N55 Y0N60 G03 X0 Y34 CR=34 N65 X0 Y26 CR=4N70 G02 X-26 Y0 CR=-26 N75 G03 X-34 CR=4N80 G03 X34 Y0 CR=34 N85 G01 G40 X60N90 Y-60N95 IF R1<90 GOTOB AB N100 G90 G0 Z150 M05 M30。