第五章 - 弯曲变形
第五章弯曲

L = l1 + l 2 + x / t
第三节 弯曲力的计算
一、弯曲力的计算 1.自由弯曲 V 形件
0.6kBt 2σ b F= r +t 0.7kBt 2σ b F= r +t
U 形件
B―――弯曲件的宽度; r―――弯曲件的内弯曲半径; k―――安全系数,k=1.3. 2.校正弯曲
F = Ap
A―――校正部分投影面积; P―――单位校正力,
横断面变化
宽向:
外区收缩 内区伸长
a.窄板(B<3t)—变成扇形内区 宽度增加,外区宽度减小 b.宽板(B>3t)—保持矩形断面
四、弯曲变形程度及其极限 1.变形程度的表达 弹性弯曲时,距中性层y处切向应变 切向应力
t 2 r+ t 2
ε θ = ln
( ρ + y )α
σ θ = Eε θ = E
第五章 内容简介: 内容简介: 弯曲是冲压基本工序。
弯曲成形技术
本章在分析弯曲变形过程及弯曲件质量影响因素的基 础上,介绍弯曲工艺计算、工艺方案制定和弯曲模设计。 涉及弯曲变形过程分析、弯曲半径及最小弯曲半径影响因 素、弯曲卸载后的回弹及影响因素、减少回弹的措施、坯 料尺寸计算、工艺性分析与工艺方案确定、弯曲模典型结 构、弯曲模工作零件设计等。
端部加压(镦整),使内、外层都受压应力,回弹一致
软凹模弯曲,使凹模产生拉伸变形
五、弯曲时的偏移
(1)原因:受力不对称。 (2)影响因素:毛坯形状不对称; 工件结构不对称; 模具结构不合理; 模具圆角、间隙、粗糙度不对称。
(3)克服偏移措施 a.压料(打顶板) ; b.定位(开定位孔) ; c.不对称件→成对弯曲→剖切, d.模具制造对称:Z/Ra/r。
第五章薄板弯曲

M ym 1 4
Zn b 12
M xn a 12
M yn
T
1 b 4 pab 4 12
a 12
(5.17)
其中Zi和Mxi、Myi为i节点沿z向的力和绕x、y轴的力偶。
由上式可见,单元在均布的横向载荷p作用下,每个 节点不但分配有全部单元横向力4pab的1/4,而且对 各节点还分配有绕x、y轴的力偶。
式中的[B]也可称为单元的应变矩阵,按 节点分块表示,有
B Bk
Bl
Bm
Bn
而对任一节点i的应变矩阵,按图5-4所示的 坐标轴,有(5.14)(p81)
单元的内力
如已解出板结构的全部节点位移{δ},则 对任意的e单元都可以找出相应的单元节 点位移{δ} e ,再应用应变矩阵[B]和薄板 弯曲的弹性矩阵[D],即可得到单元的内 力 e {M } [ D][ B]
(5.2)
应力与应变的关系为
x 1 y Dp Dp z xy
(5.3)
其中[Dp]即平面应力问题的弹性系数矩阵
板的中面处z=0,有
0
0
即中曲面内没有面内应变,也没有面内应力。
第五章
薄板弯曲
5.1 薄板的弯曲变形
如h以表示板厚,以l表示其他方向的尺寸, 当h/l<15时,可认为是薄板。 板内厚度中点构成的平面称中面。 板件一般常驻有垂直于中面的载荷(横 向载荷),在载荷作用下,板面发生弯 曲,中面由平面变为曲面,称为挠曲面。
以未变形的中面为xy坐标面,中面各点 沿z轴的横向位移以w表示,称为挠度, 如图5-1所示。 一般挠度为中面各点坐标的函数,即 w=w(x,y) 称为挠曲面方程。
材料力学第5章弯曲变形ppt课件
qL
4.22kNm
4.22kNm
M
max
32 M
max
76.4MPa
WZ
d 3
例题
20kN m
A
4m
FA
20kN m
A
MA
4m
试求图示梁的支反力
40kN
B
D
2m
2m
B
B1 FB
FB 40kN
B
D
B2
2m
2m
在小变形条件下,B点轴向力较小可忽略不
计,所以为一次超静定.
C
B1 B2
FBBBMF12AA2383qFEqELBqqLI84LI2LLZZ32F35BFF4FEFB83PBPLIEL7Z3L12IZ.218352.k75N5kFkN2PNmEL2IZ2
x
边界条件
A
L2
B
L2
C
y
连续条件
例题 5.5
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
全梁仅一个挠曲线方程
C
q
EA
共有两个积分常数 边界条件
L1
A
x
B
EI Z
L
y
例题 5.5
用积分法求图示各梁挠曲线方程时,试问在列各梁 的挠曲线近似微分方程时应分几段;将分别出现几个 积分常数,并写出其确定积分常数的边界条件
q
a
B C LBC
B
2a
FN
B
q2a4
8EIZ
FN 2a3
3EIZ
C
FN
a
D
第5章 弯曲应力分析

中
来的横截面仍为平面,只是绕中
z性
性轴转动,且距中性轴等高处变
轴
形相等。
⑶ 几何方程
y(对称轴)
纵向纤维AB的纵向线应变
O
(
((
A1B1 AB A1B1( O1O2
AB
O1O2
(ρ y)dθ ρdθ y
ρdθ
ρ
ac
d
O1
O2 O1 O2 x
A
y B
A1
B1
bd y
— 纵向纤维的应变与它到中性层的距离成正比
中性层是梁内一层既不 伸长也不缩短,不受拉应力和 压应力的纤维层。中性层与 横截面的交线为中性轴。
Northeastern University
纵向对称面 中 性 轴
中性层
ac
bd
M ac
M
bd
PAG 6
§5-2 纯弯曲时的正应力
Northeastern University
⑵ 平面假设:梁弯曲变形后,原
Aρ
z
σdA
x
σdA
y
E y2dA
ρA
Iz
y2dA
A
—
横截面对中性轴的惯性矩
EIz M 中性层的曲率 1 M z
ρ
ρ E—Iz 梁的弯曲刚度
PAG 12
§5-2 纯弯曲时的正应力
Northeastern University
等直梁纯弯曲时横截 面上任一点的正应力
σ Ey M z y
y
yC
x dA
a r
bC y
xC
x
典型应用:求组合截面的惯性矩
Ix ( Ii )x ( Ixci ai2 Ai )
《材料力学》 第五章 弯曲内力与弯曲应力

第五章 弯曲内力与应力 §5—1 工程实例、基本概念一、实例工厂厂房的天车大梁,火车的轮轴,楼房的横梁,阳台的挑梁等。
二、弯曲的概念:受力特点——作用于杆件上的外力都垂直于杆的轴线。
变形特点——杆轴线由直线变为一条平面的曲线。
三、梁的概念:主要产生弯曲变形的杆。
四、平面弯曲的概念:受力特点——作用于杆件上的外力都垂直于杆的轴线,且都在梁的纵向对称平面内(通过或平行形心主轴且过弯曲中心)。
变形特点——杆的轴线在梁的纵向对称面内由直线变为一条平面曲线。
五、弯曲的分类:1、按杆的形状分——直杆的弯曲;曲杆的弯曲。
2、按杆的长短分——细长杆的弯曲;短粗杆的弯曲。
3、按杆的横截面有无对称轴分——有对称轴的弯曲;无对称轴的弯曲。
4、按杆的变形分——平面弯曲;斜弯曲;弹性弯曲;塑性弯曲。
5、按杆的横截面上的应力分——纯弯曲;横力弯曲。
六、梁、荷载及支座的简化(一)、简化的原则:便于计算,且符合实际要求。
(二)、梁的简化:以梁的轴线代替梁本身。
(三)、荷载的简化:1、集中力——荷载作用的范围与整个杆的长度相比非常小时。
2、分布力——荷载作用的范围与整个杆的长度相比不很小时。
3、集中力偶(分布力偶)——作用于杆的纵向对称面内的力偶。
(四)、支座的简化:1、固定端——有三个约束反力。
2、固定铰支座——有二个约束反力。
3、可动铰支座——有一个约束反力。
(五)、梁的三种基本形式:1、悬臂梁:2、简支梁:3、外伸梁:(L 称为梁的跨长) (六)、静定梁与超静定梁静定梁:由静力学方程可求出支反力,如上述三种基本形式的静定梁。
超静定梁:由静力学方程不可求出支反力或不能求出全部支反力。
§5—2 弯曲内力与内力图一、内力的确定(截面法):[举例]已知:如图,F ,a ,l 。
求:距A 端x 处截面上内力。
解:①求外力la l F Y l FaF m F X AYBY A AX)(F, 0 , 00 , 0-=∴==∴==∴=∑∑∑ F AX =0 以后可省略不求 ②求内力xF M m l a l F F F Y AY C AY s ⋅=∴=-==∴=∑∑ , 0)( , 0∴ 弯曲构件内力:剪力和弯矩1. 弯矩:M ;构件受弯时,横截面上存在垂直于截面的内力偶矩。
材料力学第五章弯曲内力
CA和DB段:q=0,Q图为水平线, M图为斜直线。
AD段:q<0, Q图为向下斜直线, M图为上凸抛物线。
3、先确定各分段点的Q 、M 值,用相应形状的线条连接。
32
§5-6 纯弯曲时的正应力
• 纯弯曲(Pure Bending):某段梁的 内力只有弯矩没有剪力时,该段 梁的变形称为纯弯曲。
如图(b)示。
qL A
x1Q1
图(a) M1
图(b)
Y qL Q1 0 Q1 qL
mA(Fi) qLx1 M1 0 M1 qLx1
17
2--2截面处截取的分离体如图(c) qL
Y qL Q2 q(x2 a) 0 Q2 qx2 a qL
剪力等于梁保留一侧横向外
②写出内力方程
Q(x)
P
Q( x ) YO P
M(x) PL
x
M( x ) YOx MO
P( x L ) x
③根据方程画内力图
20
F
a
b
A
C
x1 x2
FAY
l
FS Fb / l
Fa / l
Fab/ l
M
[例]图示简支梁C点受集中力作用。
试写出剪力和弯矩方程,并画 B 出剪力图和弯矩图。
4. 标值、单位、正负号、纵标线
31
例 外伸梁AB承受荷载如图所示,作该梁的Q---M图。
3kN
6kN m 2kN/m
A C
B D
1m
4m
FA
Q 4.2
(kN) +
E
_
3
x=3.1m
1m
FB
_
3.8
材料力学---弯曲内力课件(1)

FS/kN20
FsA右-5kN;FsB左5kN ; o + -
FS(+)
FS(–)
FS(+)
FS(–)
②弯矩M:使梁变成凹形的弯矩为正;使梁变成凸形 的弯矩为负。或者说:左顺右逆的M为正, 反之相反。
M(+)
M(+) M(–)
M(–)
9
[例5-1]:求图示梁1-1、2-2截面处的内力。
ql 1
2q
解:1-1截面:
F y 0 : F S 1 ql
1a ql
M(x) RA x FS(x)
AC段:F S(x)R AF l b 0xa
RA x
Fb /l
FS
+
F M(x)
M (x)R A xF l xb 0xa
FS(x)
CB段:F S (x )R A F F l a a xl
-
M (x ) R A x F x a F ll a x a x l
Fa /l (3)绘制剪力图、弯矩图:
M
+
在集中力F作用点处,FS图发生突
Fab /l
变,M图出现尖角。
15
A
mC
B
xx
RA
a
b RB
l
解:(1)计算支反力:
M A 0 : R B m / l M B 0 : R A m / l
(2)建立剪力、弯矩方程:分AC、
M(x)
CB两段考虑,以A为原点。
RA RA FS
4
F x 0 :F N ( x 1 ) 0 0 x 1 2 a
3a
F y 0 :F s ( x 1 ) 9 4 q0 a x 1 2 a
材料力学 第5章 弯曲变形-2

材料 力学
第五章 弯曲变形:梁的刚度计算
如何提高梁的承载能力
目标: 降低
降低
材料 力学
第五章 弯曲变形:梁的刚度计算
合理布置载荷和支座
F
M
L/2
L/2
F
M
L/4
3L/4
F
对称 M
L/5
4L/5
材料 力学
第五章 弯曲变形:梁的刚度计算
工程实例
材料 力学
第五章 弯曲变形:梁的刚度计算
合理布置载荷和支座
第五章 弯曲变形:叠加原理求梁的挠度和转角
(a) (b)
材料 力学
第五章 弯曲变形:叠加原理求梁的挠度和转角
C
在集度为q/2的正对称均布荷载作用下,利用教材附录C表 中第五种情况下的公式有
材料 力学
第五章 弯曲变形:叠加原理求梁的挠度和转角
均布荷载:反对称均布荷载
C
挠曲线:与跨中截面反对称
在反对称荷载作用下,跨中截面不仅挠度为零,弯矩亦为零,但 转角不等于零,因此,可将左半跨梁 AC 和右半跨梁 CB分别视为 受集度为 q/2 的均布荷载作用而跨长为 l/2 的简支梁。
A
D
B
F2=2kN C
C F2=2kN
=
+
A
D
F2 a
B
C
F2
F2 M
B
C
材料 力学
第五章 弯曲变形:梁的刚度计算
L=400mm a=0.1mF
A
D
B
C
A
200mm F1=1kN F2=2kN
解:❶结构变换
A
D
B
C
F1=1kN
a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 弯曲变形
第五章 弯曲变形
回 顾:
弯曲内力——在外力作用下,梁的内力沿轴线 的变化规律。 弯曲应力——在外力作用下,梁内应力沿横截 面高度的分布规律。
本 章:
弯曲变形——在外力作用下,梁在空间位置的 变化规律。
第五章 弯曲变形
研究弯曲变形的目的
(1)刚度计算; (2)解简单的超静定梁。
1 1 4 qL3 qL4 ( qx x ) EI 24 6 8
第五章 弯曲变形 /三、计算弯曲变形的两种方法
将
x 0 代入得:
qL3 A EI (与C比较知: A C ) 6 EI qL4 A EI (与D比较知: A D) 8EI
因此
常数C表示起始截面的转角×刚度(EI)
(4)建立转角方程和挠曲线方程; (5)计算指定截面的转角和挠度值,特别注意 max 和 max 及其所在截面。
第五章 弯曲变形 /三、计算弯曲变形的两种方法
例题 悬臂梁受力如图所示。求 A 和 A 。 解: 取参考坐标系Axy。 1、列出梁的弯矩方程
y
A
q
B x
X``
1 2 L (0 x L ) M ( x) qx 2 2、 d 2 M ( x ) 1 2 EI" qx 2 dx EI z 2 积分一次: 1 3 EI ' EI qx C (1) 6 积分二次: 1 4 EI qx Cx D (2) 24
D左 D右 连续条件: D左 D右 B左 B右
第五章 弯曲变形 /三、计算弯曲变形的两种方法
④积分常数的物理意义和几何意义
物理意义:将x=0代入转角方程和挠曲线方程,得 C EI o即坐标原点处梁的转角,它的EI倍就是积分常数C; D EIo 即坐标原点处梁的挠度的EI倍就是积分常数D。 几何意义:C——转角 D——挠度
本章的基本内容:
一、弯曲变形的量度及符号规定; 二、挠曲线及其近似微分方程 三、计算弯曲变形的两种方法 (1)积分法(2)叠加法 四、刚度条件 提高梁弯曲刚度的措施 五、用变形比较法解简单的超静定梁。
第五章 弯曲变形
一、弯曲变形的量度及符号规定
第五章 弯曲变形 /一、弯曲变形的量度及符号规定
y
梁的挠度和转角
FBy
FAy
BC段 (a x L)
Fb M 1 ( x) FA x x, L
Fb EI1" x, L
Fb M 2 ( x) x F ( x a), L Fb EI2 " x F ( x a), L
第五章 弯曲变形 /三、计算弯曲变形的两种方法
AC段 (0 x a) Fb 2 EI1 ' EI1 x C1 , 2L Fb 3 EI1 x C1 x D1 , 6L 3、确定常数
纯弯曲
1
M
= EI
M(x)
=
力学公式
横力弯曲 ( l/h>5)
1
(x)
EI
数学公式
1 = + dw 2 3/2 (x) - [1+( )] dx
d2w dx2
小挠度情形下
max=(0.01-0.001)l
;
max 10 or 0.0175 rad .
横力弯曲
d 2 << 1 ( ) dx
c
c
w
p
x
x
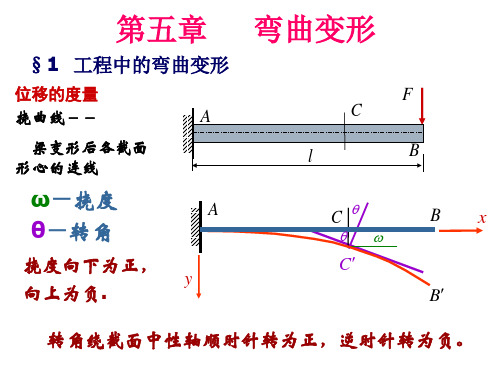
1、度量弯曲变形的两个量:
(1)挠度:梁轴线上的点在垂直于梁轴线方向的所发生的线 位移ω称为挠度。(工程上的一般忽略水平线位移)
(2)转角:梁变形后的横截面相对于原来横截面绕中性轴所 转过的角位移θ称为转角。
第五章 弯曲变形 /一、弯曲变形的量度及符号规定
y c
c
x
w
p
第五章 弯曲变形 /三、计算弯曲变形的两种方法
(3)利用边界条件、连续条件确定积分常数
①积分常数的数目——取决于的分段数
M (x) —— n 段 积分常数——2n个 举例:
M (x) 分2段,则积分常数2x2=4个
第五章 弯曲变形 /三、计算弯曲变形的两种方法 ②积分常数的确定——边界条件和连续条件: 边界条件:梁在其支承处的挠度或转角是已知的 ,这样的已知条件称为边界条件。 连续条件:梁的挠曲线是一条连续、光滑、平坦 的曲线。因此,在梁的同一截面上不可能有两个 不同的挠度值或转角值,这样的已知条件称为连 续条件。 边界条件 积分常数2n个=2n个 连续条件
的相互作用力,故应作为分段点;
第五章 弯曲变形 /三、计算弯曲变形的两种方法 (2)分段列出梁的挠曲线近似微分方程,并对其积分 两次
对挠曲线近似微分方程积分一次,得转角方程:
d 1 ( x) ( M ( x)dx c) dx EI
再积分一次,得挠曲线方程:
1 ( x) ( M ( x)dx) cx D EI
ql 2 q l 2 ( x2 ) 8 2 2
l ( x 2 l) 2
第五花大绑章 弯曲变形 /三、计算弯曲变形的两种 方法 二、分段建立近似微分方程,并对其积分两次:
d 2 1 dx1
EI1
2
AB段:
M ( x1 ) EI
即:
ql 2 M ( x1 ) 8
x L, B 0
(3)
(2)
由光滑连续条件:
(4)
可解得:
Fb 2 C1 ( L b 2 ) C2 , 6L
D1 D2 0
第五章 弯曲变形 /三、计算弯曲变形的两种方法
则简支梁的转角方程和挠度方程为
BC段 (a x L) (0 x a ) AC段 Fb F ( x a) 2 Fb 2 2 2 2 ( x) [3x 2 ( L2 b 2 )] , 1 ( x) [3x ( L b )], 6 LEI 2 6 LEI Fb L Fb 3 2 2 2 ( x) [ x 3 ( L2 b 2 ) x ( x a)3 ] 1 ( x) [ x ( L b ) x], 6 LEI 6 6 LEI
EI ( x1 ) EI1 m( x1 )dx c1
EI ( x1) EI1 M ( x1 )dx dx c1 x1 D1
ql 2 2 x1 c1 x1 D1 …… (2) 16
ql 2 x1 c1 8
…………… (1)
第五章 弯曲变形 /三、计算弯曲变形的两种方法 BC段:
积分法求梁变形举例:用积分法求图示梁的 B 、B 、C 、C :
第五章 弯曲变形 /三、计算弯曲变形的两种方法 一 分段建立弯矩方程: AB段:
ql 2 M ( x1 ) (0<x1≤ 8
l ) 2
BC段:
ql 2 l 1 l M ( x2 ) q( x 2 ) ( x 2 ) 8 2 2 2
代入 y1 ( x) 得:
Fb( L2 b ) m ax 9 3EI
3 2 2
L 若 a b 则: 2
max x L
2
FL3 48 EI
在简支梁情况下,不管F作用在何处(支承除外),
max 可用中间挠度代替,其误差不大,不超过3%。
第五章 弯曲变形 /三、计算弯曲变形的两种方法
第五章 第八章 弯曲变形 /三、计算弯曲变形的两种方法 1、积分法——基本方法 利用积分法求梁变形的一般步骤: (1)建立坐标系(一般:坐标原点设在梁的左端),求 支座反力,分段列弯矩方程; 分段的原则:
①凡载荷有突变处(包括中间支座),应作为分段点; ②凡截面有变化处,或材料有变化处,应作为分段点; ③中间铰视为两个梁段间的联系,此种联系体现为两部分之间
4、求转角
x 0 代入得:
A 1 x 0
Fb( L2 b 2 ) 6 LEI
x L 代入得:
B 2 xL
Fab( L a) 6 LEI
第五章 弯曲变形 /三、计算弯曲变形的两种方法
5、求 max 。
d 由 0求得max 的位置值x。 dx
Fb( L2 b 2 ) A 0, 6 LEI
则由
C 1 x a
Fab(a b) 0( a b) 3LEI
0在AC段。
Fb 1 ( x) [3x 2 ( L2 b 2 )] 0 6 LEI
解得:
x
L2 b 2 3
第五章 弯曲变形 /三、计算弯曲变形的两种方法
EI 2 ql 2 q l 2 M ( x2 ) ( x2 ) 2 2 8
……… (3)
ql 2 q l 3 EI ( x2 ) EI 2 x 2 ( x2 ) c2 8 6 2
梁的挠度和转角
x
2、符号规定:
W(-) θ(-)
(1)坐标系的建立: 坐标原点一般设在梁的左端,并规 定:以变形前的梁轴线为x轴,向右为正;以y轴代表曲线 的纵坐标(挠度),向上为正。 (2)挠度的符号规定:向上为正,向下为负。 (3)转角的符号规定:逆时针转向的转角为正; 顺时针转向的转角为负。
第五章 弯曲变形
由边界条件:
BC段 (a x L) Fb 2 F EI2 ' EI 2 x ( x a ) 2 C2 2L 2 Fb 3 F EI2 x ( x a)3 C2 x D2 , 6L 6
x 0, A 0 (1) x a时,1 2 x a时,1 2