摆线泵泵站设计计算说明书
泵站计算说明书

一、流量的确定和设计扬程的估算:1、计流量设计水量为100000吨/天,用水时变化系数为1.5最高日平均用水量Q :2、估算扬程:(1)泵所需的净扬程:最低水位时:181817.4.m ST H =+-+2+2=3276最高水位时:181821.2m ST H =+-+2+2=28.96(2)自流管的水头损失:清水池到吸水井设置两根同样的自流管 每根自流管的流量311 1.7360.86822i Q Q m s ==⨯= 取经济流速 1.0v m s =1051.5D mm === 查水力计算表得,实际管径选用'1000mm D =,实际流速' 1.1v m s =,水利系数31.3310i -=⨯自流管沿程水头损失3y 1.3310100.0133h il m -==⨯⨯=自流管在清水池中设置喇叭口一个,采取垂直安装应遵守一下规定:1).淹没深度0.5 1.0h m ≥2).喇叭口与井底间距要大于0.8D ,行进流速小于吸水管进口流速3).喇叭口距清水池池壁距离要大于0.75 1.0()D 。
查水力计算表得:喇叭口局部阻力系数10.2ξ=,喇叭口与自流管采用90钢制弯头,局部阻力系数2 1.07ξ=自流管阀门局部阻力系数3.1o ξ=33100000 1.56250 1.73624Q m h m s =⨯==自流管出口局部阻力系数4 1.0ξ= 自流管的局部水头损失221234 1.1()(0.2 1.070.1 1.0)0.146229.8j v h m g ξξξξ=+++=+++⨯=⨯ 正常工作时,自流管总水头损失:0.01330.1460.16y j h h h m =+=+=泵站内管路的水头损失粗估为2m则泵设计扬程为:低水位时,max 18+18+10+2+2+0.16-17.4=32.76m H =高水位时,max 18+18+10+2+2+0.16-17.4=28.96m H =二、初选泵和电机四台500S59A 型泵3(Q 15002170m ,3957,320,6)SV h H m N KW H m ====,三台工作,一台备用。
泵站设计计算书
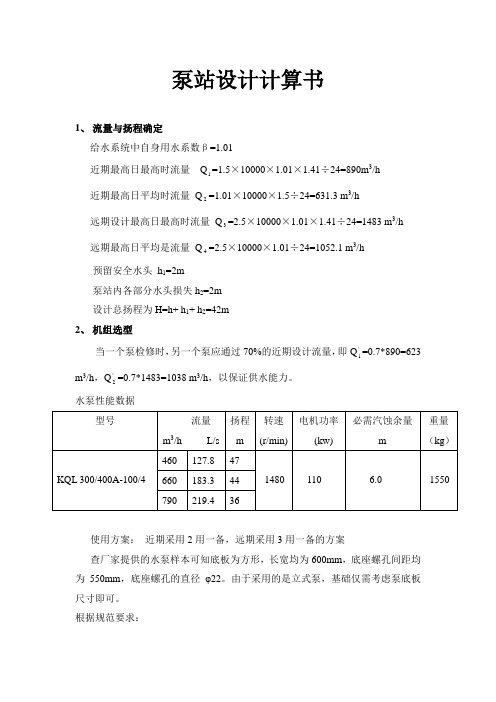
泵站设计计算书1、流量与扬程确定给水系统中自身用水系数β=1.01=1.5×10000×1.01×1.41÷24=890m3/h 近期最高日最高时流量Q1=1.01×10000×1.5÷24=631.3 m3/h 近期最高日平均时流量Q2远期设计最高日最高时流量Q=2.5×10000×1.01×1.41÷24=1483 m3/h3=2.5×10000×1.01÷24=1052.1 m3/h 远期最高日平均是流量Q4预留安全水头h1=2m泵站内各部分水头损失h2=2m设计总扬程为H=h+ h1+ h2=42m2、机组选型=0.7*890=623 当一个泵检修时,另一个泵应通过70%的近期设计流量,即Q‘1=0.7*1483=1038 m3/h,以保证供水能力。
m3/h,Q'2水泵性能数据使用方案:近期采用2用一备,远期采用3用一备的方案查厂家提供的水泵样本可知底板为方形,长宽均为600mm,底座螺孔间距均为550mm,底座螺孔的直径φ22。
由于采用的是立式泵,基础仅需考虑泵底板尺寸即可。
根据规范要求:基础长度L=底座长度L 1+(0.15~0.20)m=600+200=800mm 基础宽度B=底座螺孔间距b 1+(0.15~0.20)m=550+200=750mm于是计算出基础平面尺寸为800mm*750mm , 机组总重量W=1550*9.8=15190N, 基础深度为H=**0.3B L W=3m式中 L ——基础长度,L=0.800m ; B ——基础宽度,B=0.750m ;γ——基础所用材料的容重,对于混凝土基础,γ=23520N/m 33,吸水管和压水管路的确定吸水管采用钢铁管 v=1.36m/s 1000i=6.39 DN=400mm 压水管采用钢铁管 v=2. 4m/s 1000i=29.1 DN=300mm 4,吸水管和压水管的水头损失 吸水管中水头损失∑h=∑h s +∑h l∑h l =1.5*6.39÷1000=0.0096m∑h s =(ζ1+ζ2+ζ3)*v 2/2g+ζ4*v 21/2g=(0.1+0.9+0.2)*1.362/2*9.8+0. 18*2.42/2*9.8=0.166mζ1:吸水口局部阻力系数ζ2:标准钢铁400mm900弯头局部阻力系数 ζ3:蝶阀局部阻力系数ζ4:DN400*300偏心渐缩管的局部阻力系数 ∑h=0.0096+0.166=0.1756m 压水管路德局部损失∑h=∑h s +∑h l∑h l =2.5*29.1÷1000=0.07m∑h s =(ζ5+ζ6+ζ7)*v 2/2g=(3.5+0.2+0.2)*2.4/2*9.8=0.478m ζ5:止回阀局部阻力系数 ζ6:蝶阀局部阻力系数ζ7:蝶阀局部阻力系数∑h=0.07 +0.478=0.548m因为泵内总损失H=0. 548+0.1756=0.7236m所以所选的泵是适合的。
水泵站设计说明书
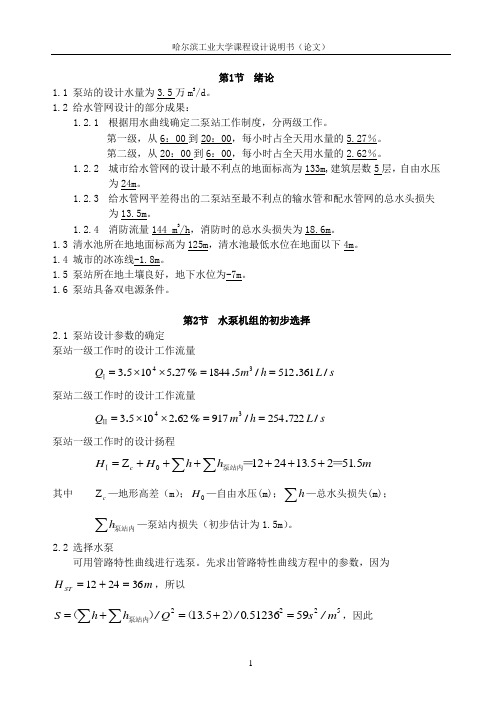
第1节 绪论 1.1 泵站的设计水量为3.5万m 3/d 。
1.2 给水管网设计的部分成果:1.2.1 根据用水曲线确定二泵站工作制度,分两级工作。
第一级,从6:00到20:00,每小时占全天用水量的5.27%。
第二级,从20:00到6:00,每小时占全天用水量的2.62%。
1.2.2 城市给水管网的设计最不利点的地面标高为133m,建筑层数5层,自由水压为24m 。
1.2.3 给水管网平差得出的二泵站至最不利点的输水管和配水管网的总水头损失为13.5m 。
1.2.4 消防流量144 m 3/h ,消防时的总水头损失为18.6m 。
1.3 清水池所在地地面标高为125m ,清水池最低水位在地面以下4m 。
1.4 城市的冰冻线-1.8m 。
1.5 泵站所在地土壤良好,地下水位为-7m 。
1.6 泵站具备双电源条件。
第2节 水泵机组的初步选择2.1 泵站设计参数的确定泵站一级工作时的设计工作流量s L h m Q /./.%..36151251844275105334==⨯⨯=Ⅰ 泵站二级工作时的设计工作流量s L h m Q /./%..722254917622105334==⨯⨯=Ⅱ泵站一级工作时的设计扬程m ..h h H H c 55125132412Z 0==泵站内Ⅰ++++++=∑∑其中 c Z —地形高差(m );0H —自由水压(m);∑h —总水头损失(m);∑泵站内h—泵站内损失(初步估计为1.5m )。
2.2 选择水泵可用管路特性曲线进行选泵。
先求出管路特性曲线方程中的参数,因为m H ST 362412=+=,所以5222595123602513m /s ./.Q /h h S =+=+=∑∑)()(泵站内,因此225936Q SQ H H ST +=+=。
为了方便日后水泵的管理和维修,选择三台同样型号的水泵,互为备用,第一级工作时两台水泵并联工作,第二级工作时一台水泵单独工作。
3+1摆线泵封面及编写提纲

摆线泵泵站设计计算说明书机械分析与设计实践专题
年级
专业
学号
姓名
指导教师
浙江大学城市学院工程分院
2011年10月
摆线泵泵站设计计算说明书编写提纲
1. 摆线泵泵站的结构概述
2. 设计原始参数
3. 摆线泵设计计算
3.1 摆线泵的结构参数设定
齿数、圆弧齿圈齿数和摆线齿轮齿数、圆弧齿圈的齿面圆弧半径、齿面圆弧中心的分布圆半径、圆弧齿圈和摆线齿轮的啮合中心距(即偏心距)
3.2 摆线齿轮齿廓坐标计算
3.3摆线齿轮齿形绘制、圆弧齿圈的齿形绘制
3.4摆线齿轮啮合状态图绘制
3.5摆线泵的排量分析计算
4.渐开线行星减速传动机构设计
4.1传动比、齿数、模数和行星齿轮数目确定
4.2变位传动设计计算
4.3齿轮几何尺寸计算
4.4齿轮齿廓的渐开线坐标计算及齿形绘制
4.5行星传动啮合状态检验
5.溢流阀分析设计
5.1溢流阀结构及主要元件设计
5.2溢流阀结构设计说明
5.3溢流阀弹簧结构参数设定
5.4溢流阀弹簧的刚度计算
5.5溢流阀弹簧的装配压缩量计算
6.摆线泵泵站的结构设计
6.1摆线泵泵站的结构总图设计的简要说明
6.2摆线泵泵站的主要零件设计
6.3渐开线齿轮零件图、摆线齿轮零件图、行星架零件图、溢流阀弹簧零件图
附录:渐开线行星齿轮机构设计计算表
摆线齿轮齿廓坐标计算表
总装设计图
主要零件设计图
上述文本内容中有关设计计算部分必须应用数学公式编辑器输入相关的计算公式,并代入设定的参数后求得相应的结果数据。
泵站设计计算书
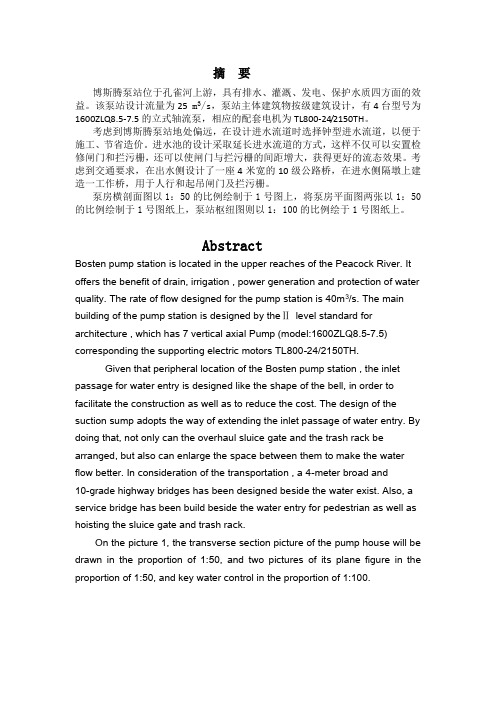
摘要博斯腾泵站位于孔雀河上游,具有排水、灌溉、发电、保护水质四方面的效益。
该泵站设计流量为25 m3/s,泵站主体建筑物按级建筑设计,有4台型号为1600ZLQ8.5-7.5的立式轴流泵,相应的配套电机为TL800-24/2150TH。
考虑到博斯腾泵站地处偏远,在设计进水流道时选择钟型进水流道,以便于施工、节省造价。
进水池的设计采取延长进水流道的方式,这样不仅可以安置检修闸门和拦污栅,还可以使闸门与拦污栅的间距增大,获得更好的流态效果。
考虑到交通要求,在出水侧设计了一座4米宽的10级公路桥,在进水侧隔墩上建造一工作桥,用于人行和起吊闸门及拦污栅。
泵房横剖面图以1:50的比例绘制于1号图上,将泵房平面图两张以1:50的比例绘制于1号图纸上,泵站枢纽图则以1:100的比例绘于1号图纸上。
AbstractBosten pump station is located in the upper reaches of the Peacock River. It offers the benefit of drain, irrigation , power generation and protection of water quality. The rate of flow designed for the pump station is 40m3/s. The main building of the pump station is designed by theⅡlevel standard for architecture , which has 7 vertical axial Pump (model:1600ZLQ8.5-7.5) corresponding the supporting electric motors TL800-24/2150TH.Given that peripheral location of the Bosten pump station , the inlet passage for water entry is designed like the shape of the bell, in order to facilitate the construction as well as to reduce the cost. The design of the suction sump adopts the way of extending the inlet passage of water entry. By doing that, not only can the overhaul sluice gate and the trash rack be arranged, but also can enlarge the space between them to make the water flow better. In consideration of the transportation , a 4-meter broad and10-grade highway bridges has been designed beside the water exist. Also, a service bridge has been build beside the water entry for pedestrian as well as hoisting the sluice gate and trash rack.On the picture 1, the transverse section picture of the pump house will be drawn in the proportion of 1:50, and two pictures of its plane figure in the proportion of 1:50, and key water control in the proportion of 1:100.第一章泵站兴建缘由及概况第一节建站缘由博斯腾湖位于我国新疆巴音郭楞蒙自治州境内。
摆线泵工作原理及其设计计算
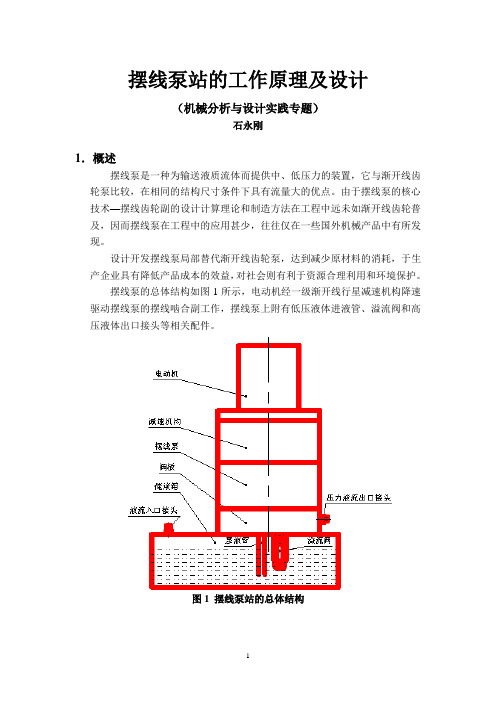
摆线泵站的工作原理及设计(机械分析与设计实践专题)石永刚1.概述摆线泵是一种为输送液质流体而提供中、低压力的装置,它与渐开线齿轮泵比较,在相同的结构尺寸条件下具有流量大的优点。
由于摆线泵的核心技术—摆线齿轮副的设计计算理论和制造方法在工程中远未如渐开线齿轮普及,因而摆线泵在工程中的应用甚少,往往仅在一些国外机械产品中有所发现。
设计开发摆线泵局部替代渐开线齿轮泵,达到减少原材料的消耗,于生产企业具有降低产品成本的效益,对社会则有利于资源合理利用和环境保护。
摆线泵的总体结构如图1所示,电动机经一级渐开线行星减速机构降速驱动摆线泵的摆线啮合副工作,摆线泵上附有低压液体进液管、溢流阀和高压液体出口接头等相关配件。
图1 摆线泵站的总体结构2.渐开线行星减速机构设计概要驱动电机的转速与功率成正比,因此为了选用较小外形尺寸的驱动电机,拟采用具有高转速的单相串激交流电动机,电机转速为约为6000~8000 r/min。
摆线泵的摆线啮合副的工作转速约为1000~1200 r/min。
因此需要引入一级渐开线行星减速传动机构,如图2所示,其中输入级是中心齿轮1与电机轴联接,行星齿轮2安装在行星架H上,内齿轮3与摆线泵壳体固定联接。
经一级减速后的回转运动由行星架H输出,驱动摆线啮合副的摆线轮回转。
图2 一级行星减速机构2.1渐开线行星减速机构设计的准则渐开线行星齿轮传动设计时必须满足以下4项准则要求:1)传动比条件—在选配中心齿轮和内齿圈的齿数时,必须满足传动比要求。
2)同中心距条件—即行星齿轮与内齿圈的中心距和行星齿轮与中心齿轮的中心距必须相等。
3)多个行星齿轮均匀分布条件—即必须保障多个行星齿轮能够被均匀安装在行星架上,并能与内齿圈和中心齿轮正确啮合。
4)不邻接条件—行星齿轮数量在三个以上时,必须防止相邻的行星齿轮不干涉。
2.2 传动比计算为满足准则1),渐开线行星减速机构的传动比按下式计算3111H z z i z +=(1) 根据输入和输出转速的要求,即可按式设计确定中心齿轮1和齿圈3的齿数,即311(1)H z z i =- (2)2.3 行星齿轮2的齿数确定行星齿轮2可按下式计算确定 3122z zz -= (3)求得的2z 值若非整数,应取邻近的整数。
泵站设计计算书

泵站设计计算书泵站设计计算书第⼀章:泵站兴建缘由及概况1.兴建缘由:博斯腾湖位于我国新疆巴⾳郭楞蒙⾃治州境内。
其上游为开都河、下游为孔雀河。
故博斯腾湖既是开都河⽔系和焉耆盆地地⾯径流的归宿地,⼜是孔雀河的发源地。
多年以来孔雀河⽔道狭窄,芦苇丛⽣,博斯腾湖⽔出流不畅,沿岸湖宽⽔浅,湖⾯蒸发损失很⼤(年蒸发量约为10亿m3),因⽽造成孔雀河灌区农业⽤⽔不⾜,整个焉耆盆地地下⽔位升⾼,⼟壤盐渍化严重。
因此巴⾳郭楞蒙古⾃治州粮⾷产量⼀直较低。
每年均由国家调进粮⾷。
由于孔雀河枯⽔季节流量⼩,故不能满⾜下游两个⽔电站发电的需⽔量。
其中铁门关⽔电站5×8500kw 机,只能运⾏⼀台,⽯灰窑⽔电站2×3000+2×3200kw机也不能满⾜机组的发电量。
同时由于湖⾯蒸发损失的增加,近20年以来,博湖的⽔质也发⽣了很⼤的变化,湖⽔的矿化度1958年为0.383~0.390g/L,⽽1981年6~8⽉的平均矿化度为1.8g/L。
22年中平均每年增⾼0.064g/L博湖已由淡⽔湖变为微咸湖,⽔质变坏的趋势,近⼏年更为严重。
为此,决定在博湖的西南⾯,孔雀河⼝以东约两公⾥处建设泵站,⽬的在于:1.根据焉耆盆地治碱、排⽔,降低地下⽔位的要求,保证湖⽔位低于1046m⾼程;2.调节孔雀河流量,满⾜库尔勒和塔⾥⽊两灌区灌溉⽤⽔的需要;3.保证铁门关⽔电站和⽯灰窑电站枯⽔期的发电流量,满⾜负荷要求,冬季不要限电;4.促进湖⽔循环,防⽌湖⽔继续咸化,同时限制地下⽔位升⾼,减轻⼟壤盐渍化程度。
博湖泵站建成后,可兼收排⽔、灌溉、发电、保护⽔质四⽅⾯的效益,⼀举⽽数得。
2.基本资料的分析整理。
⼀)、地形资料博斯腾湖附近⽔系地形图(1/500)。
⼆)、地质资料泵站站址处:地表下0-2m,厚2m,亚砂⼟(⼲容重γ⼲=1.5t/m3);地表下2-12m厚10m细砂⼟(⼲容重γ⼲=1.55 t/m3);贯⼊10cm数达60次;地表下12-112m厚100m,亚砂⼟(⼲容重γ⼲=1.8t/m3),贯⼊3cm,击数为70次;地下⽔位1047.08-1047.78m,低于湖⽔位,由湖⽔补给。
泵站计算说明书
给水排水工程《水泵与水泵站》课程设计计算说明书2015年5月课程设计计算步骤与说明:一、确定设计流量与扬程 1. 设计流量Q:已知城市最高日设计用水量为 错误!未找到引用源。
=5000 m 3/d 设计流量:错误!未找到引用源。
=错误!未找到引用源。
*1.01/24=210.42 3m /h =58.45L/s2. 用水量最大时:根据设计资料已知:输配水管网中水头损失 错误!未找到引用源。
=6.13m 控制点自由水头H 自=20m吸水池到控制点高差H 差=55m泵站内水头损失估为 错误!未找到引用源。
=2m 安全水头H 安=2m水泵所需静扬程:错误!未找到引用源。
=日自+日差=75m 总水头损失:错误!未找到引用源。
=E h 管+E h 内=8.13m 水泵设计扬程:3. 消防用水时:1)流量: 错误!未找到引用源。
=58.45+50=108.45L/s 2)扬程:刀 h 管=10.54m , H 自=20m , H 差=55m二、初步选泵和电动机 1. 做水泵高效段特性曲线图。
选泵的主要依据:流量、扬程以及其变化规律则扬程H = H ST + Jh+AH=89.54mH 二亦+ £h+AH=85.13m①大小兼顾,调配灵活②型号整齐,互为备用③合理地用尽各水泵的高效段④要近远期相结合。
小泵大基础”⑤大中型泵站需作选泵方案比较。
根据上述选泵要点以及离心泵性能曲线型谱图和选泵参考书综合考虑初步拟定以下两种方案:方案一:两台6SA-6 —用一备方案二:两台8SA-7A 一用一备方案比较:结论:经比较,虽然方案二的扬程利用率高于方案一,但是方案一中泵的轴功率、电机功率均小于方案二,在实际生产中更经济环保有效。
所以选用方案一。
2. 初步选泵校核:消防时,Q=108.45L/sH=89.54m一台泵开启不能满足消防要求,消防状况下,打开备用泵后,所选泵工作时流量扬程均能符合消防要求。
3. 选配电机、设计机组的基础1.泵及电机安装尺寸2. 基础尺寸计算基础长度L: L=*泵和电动机最外端螺孔间距L1+ (0.4〜0.5 )m=1718+400=2218mm 则基础长度L 取2300mm 基础宽度B: B=水泵或电机最外端螺孔间距+ (0.4〜0.5 )m=640+400mm=1040mn则基础宽度B 取1150mm基础深度H: H=3X(W 泵+W 电)/LB p =3X 250/(2.3X 1.15X 2400)=0.2 m综上,基础高度H取200mm要求泵站内各个泵的泵轴在同一水平线上四、决定泵站的形式1. 吸水池情况:建于地下0.5m,全埋式,有效深度5.0m,超高0.3m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摆线泵泵站设计计算说明书1.前言摆线泵是一种内啮合齿轮泵,具有结构紧凑,容积效率高,工作平稳等特点,在动力机械、机床、和许多轻工业机械中被广泛应用。
参阅相关的论文,目前很少有能直接用于摆线泵理论排量精确计算的数学模型,所论述的外转子非啮合区齿廓以锐角转折,不便于制造。
为此,根据啮合传动原理,导出摆线泵的齿廓坐标计算的数学公式,并得出了理论排量计算的数学公式,便于从事摆线泵设计和制造的同行直接引用。
2.设计原始参数直流电机转速为8000r/min,行星齿轮转动比6.0,中心距a=2.2,油压8Mpa。
3摆线泵泵站的结构概述摆线泵是一种为输送液质流体而提供中、低压力的装置,它与渐开线齿轮泵比较,在相同的结构尺寸条件下具有流量大的优点。
图1中绘出摆线泵的三个构件,在座圈上切制了容纳摆线啮合副的圆柱形凹坑,钻出进液孔和出液孔,并且还制出两个圆弧形构槽,作为进液区和出液区。
进液孔和出液孔分别与阀板连通。
另有一个端盖将摆线啮合副密封(图中未画出)。
在端盖上有,供驱动轴通过并与摆线齿轮键销联接。
图1 摆线泵的主要构件电动机的转速经一级渐开线行星齿轮机构减速后,使摆线齿轮的驱动轴低速回转,带动摆线泵运转。
图2中绘出摆线泵的啮合过程,其中摆线齿轮的齿数为8,分齿角为45º,图示的每步转角9º;圆弧齿圈的齿数为9,在摆线齿轮的推动下,每步对应回转角8º(注:实际运行是连续回转,而不是步进回转)。
当摆线齿轮的转角为45º时,完成一对轮齿的啮合传动全过程。
从图2中可以看出:在水平中心线的上方,摆线齿轮与内齿圈之间的齿间空腔逐渐增大,产生负压,因而能经由管道从储液箱吸入油液或其它液态工质;在水平中心线的下方,齿间空腔逐渐减小,从而使已存贮在齿间空腔内的液态工质的压力增大并输出。
液态工质的工作压力由后续的液压系统中的溢流阀或调压阀控制。
图2 摆线泵的啮合过程摆线泵的总体结构如图3所示,电动机经一级渐开线行星减速机构降速驱动摆线泵的摆线啮合副工作,摆线泵上附有低压液体进液管、溢流阀和高压液体出口接头等相关配件。
图3 摆线泵站的总体结构4电动机主要参数选择直流电机转速为 8000r/min5渐开线行星减速传动机构设计渐开线行星齿轮传动设计时必须满足以下4项准则要求:1)传动比条件—在选配中心齿轮和内齿圈的齿数时,必须满足传动比求。
2)同中心距条件—即行星齿轮与内齿圈的中心距和行星齿轮与中心齿轮的中心距必须相等。
3)多个行星齿轮均匀分布条件—即必须保障多个行星齿轮能够被均匀安装在行星架上,并能与内齿圈和中心齿轮正确啮合。
4)不邻接条件—行星齿轮数量在三个以上时,必须防止相邻的行星齿轮不干涉。
5.1齿数、模数和行星齿轮数目确定(1) 为满足准则1),渐开线行星减速机构的传动比按下式计算3111H z z i z +=(1)根据输入和输出转速的要求,即可按式设计确定中心齿轮1和齿圈3的齿数,即 311(1)H z z i =-=12(6-1)=60 (2)行星齿轮2可按下式计算确定3122z zz -= =(60-12)/2=245.2变位传动设计计算求得的2z 值若非整数,应取邻近的整数。
为满足准则2)的要求,可分两种情况处理:如按上式求得的2z 值是整数,则必然满足准则2)的要求,齿轮可以采用标准齿轮,也可以采用变位齿轮;如2z 值是经圆整后整数,则必须采用变位齿轮才能满足准则2)的要求。
5.3 齿轮几何尺寸计算 1) 确定模数和齿数根据结构尺寸要求,初选齿轮的模数m 。
根据传动比和设置行星齿轮的数量,按式(2)和(4)计算确定齿数z 1、z 3,然后按式(3)计算行星齿轮2的齿数z 2。
确定齿数z 1、z 2、、z 3的过程是一个反复分析比较的过程,力求获得一组优化的数据。
齿形标准参数为刀具角α=20°、齿顶高系数h a * =1.0、顶隙系数c *=0.25。
2) 变位齿轮传动设计和主要几何尺寸计算计算中心距: 两对齿轮的标准中心距为12121()2a m z z =+=0.5(12+24) =1823321()2a m z z =- =0.5(60-24)=18根据同中心距条件,取 ''1223a a =3)计算啮合角'1212'12cos arccos()a a αα==34.401779 '2323'23cos arccos()a a αα==34.401779 4)计算变位系数121212()2tan z z x x inv inv ααα+'+=-=1.1782269 323223()2tan z z x x inv inv ααα-'-=-=-0.78548 式中渐开线函数按下式计算121212tan inv ααα'''=-=0.0387288t a n i n v ααα=-=0.014904 232323t a n i n v ααα'''=-=0.038729 角度值以弧度计。
根据求得的12()x x +和32()x x -值,可适当分配1x 、2x 、3x 。
在确定各变位系数值时,必须顾及不发生根切的条件和齿顶不变尖条件5.4 齿轮齿廓的渐开线坐标计算及齿形绘制绘中心齿轮1的齿廓数据5.63815572471545,05.75008134290669,0.0150333722006782 5.86188875235798,0.0429729048066749 5.97345896361471,0.07976763684788636.08467220523171,0.12406030037854 6.1954080010376,0.175105477825059 6.305545248013,0.232422598825833 6.41496229474006,0.295672614237893 6.52353702038017,0.364601********* 6.63114691413643,0.439009566184658 6.73766915515729,0.518735********* 6.84298069283727,0.6036416487362 6.94695832747058,0.6936121631718167.04947879121315,0.78854291556791 7.1504188293083,0.888340323826883 7.24965528153119,0.99291820383204 7.34706516380699,1.10219577273821 7.44252574995746,1.21609612000288 7.53591465353061,1.33454501716114绘行星齿轮2的齿廓数据11.2763114494309,011.4001953361241,0.0123170418737174 11.5240392431066,0.0350453055146745 11.647803037881,0.0647611895712032 11.7714464284603,0.10028611933527311.8949289713092,0.1409593072526412.0182100793241,0.186347565120581 12.1412490298504,0.236141525374091 12.2640049727352,0.290107712209718 12.3864369384149,0.348062910674708 12.5085038460359,0.409859058743585 12.6301645116067,0.475373696523817 12.7513776561805,0.54450359996507 12.8721019140672,0.61716035691866612.9922958410725,0.69326718785482813.1119179227637,0.772756596795397 13.2309265827596,0.855568594758175 13.3492801910448,0.94164932924636 13.4669370723055,1.0309500087245绘内齿轮3的齿廓数据29.7764055171656,0.366142*********29.9225206064648,0.4191987757158130.0685088430429,0.47478918006343 30.2143593751647,0.532840275831261 30.3600613350851,0.593287444870376 30.5056038395319,0.656073432512238 30.65097599019,0.721147115895161 30.796166874187,0.78846253657179930.9411655645785,0.8579781289671331.0859611208359,0.929656096705487 31.2305425893335,1.00346190242801 31.3748990038378,1.07936384599347 31.5190193859964,1.15733271241207 31.662892745829,1.23734147544596 31.8065080822183,1.3193650461205431.949854383402,1.4033800578196332.0929206274655,1.48936468144439 32.2356957828354,1.57729846547754 32.3781688087738,1.667162196833175.5 行星传动啮合状态检验采用多个行星齿轮能提高传动机构的负荷能力,但必须满足上述准则3)和准则4)。
设行星齿轮的数量为n ,根据准则3)的要求,必须按下式校核计算,并调整3z 、1z 和2z 值。
31z z k n+==(60+12)/3=24 为整数 根据准则4)的要求,必须满足条件式*122()sin()22a z z z h nπ+>=++ (5)(12+24)sin(π/3)=31.167 > 281)避免产生根切。
要求选定的变位系数不小于齿轮不产生根切最小变位系数。
2)避免齿顶变尖。