plc文献翻译
PLC外文文献翻译

Programmable logic controllerA programmable logic controller (PLC) or programmable controller is a digital computer used for automation of electromechanical processes, such as control of machinery on factory assembly lines, amusement rides, or lighting fixtures. PLCs are used in many industries and machines. Unlike general-purpose computers, the PLC is designed for multiple inputs and output arrangements, extended temperature ranges, immunity to electrical noise, and resistance to vibration and impact. Programs to control machine operation are typically stored in battery-backed or non-volatile memory. A PLC is an example of a real time system since output results must be produced in response to input conditions within a bounded time, otherwise unintended operation will result.1.HistoryThe PLC was invented in response to the needs of the American automotive manufacturing industry. Programmable logic controllers were initially adopted by the automotive industry where software revision replaced the re-wiring of hard-wired control panels when production models changed.Before the PLC, control, sequencing, and safety interlock logic for manufacturing automobiles was accomplished using hundreds or thousands of relays, cam timers, and drum sequencers and dedicated closed-loop controllers. The process for updating such facilities for the yearly model change-over was very time consuming and expensive, as electricians needed to individually rewire each and every relay.In 1968 GM Hydramatic (the automatic transmission division of General Motors) issued a request for proposal for an electronic replacement for hard-wired relay systems. The winning proposal came from Bedford Associates of Bedford, Massachusetts. The first PLC, designated the 084 because it was Bedford Associates' eighty-fourth project, was the result. Bedford Associates started a new company dedicated to developing, manufacturing, selling, and servicing this new product: Modicon, which stood for MOdular DIgital CONtroller. One of the people who worked on that project was Dick Morley, who is considered to be the "father" of the PLC. The Modicon brand was sold in 1977 to Gould Electronics, and later acquired by German Company AEG and then by French Schneider Electric, the current owner. One of the very first 084 models built is now on display at Modicon's headquarters in North Andover, Massachusetts. It was presented to Modicon by GM, when the unit was retired after nearly twenty years of uninterrupted service. Modicon used the 84moniker at the end of its product range until the 984 made its appearance.The automotive industry is still one of the largest users of PLCs.2.DevelopmentEarly PLCs were designed to replace relay logic systems. These PLCs were programmed in "ladder logic", which strongly resembles a schematic diagram of relay logic. This program notation was chosen to reduce training demands for the existing technicians. Other early PLCs used a form of instruction list programming, based on a stack-based logic solver.Modern PLCs can be programmed in a variety of ways, from ladder logic to more traditional programming languages such as BASIC and C. Another method is State Logic, a very high-level programming language designed to program PLCs based on state transition diagrams.Many early PLCs did not have accompanying programming terminals that were capable of graphical representation of the logic, and so the logic was instead represented as a series of logic expressions in some version of Boolean format, similar to Boolean algebra. As programming terminals evolved, it became more common for ladder logic to be used, for the aforementioned reasons. Newer formats such as State Logic and Function Block (which is similar to the way logic is depicted when using digital integrated logic circuits) exist, but they are still not as popular as ladder logic.A primary reason for this is that PLCs solve the logic in a predictable and repeating sequence, and ladder logic allows the programmer (the person writing the logic) to see any issues with the timing of the logic sequence more easily than would be possible in other formats.2.1ProgrammingEarly PLCs, up to the mid-1980s, were programmed using proprietary programming panels or special-purpose programming terminals, which often had dedicated function keys representing the various logical elements of PLC programs. Programs were stored on cassette tape cartridges. Facilities for printing and documentation were very minimal due to lack of memory capacity. The very oldest PLCs used non-volatile magnetic core memory.More recently, PLCs are programmed using application software on personal computers. The computer is connected to the PLC through Ethernet, RS-232, RS-485 or RS-422 cabling. The programming software allows entry and editing of the ladder-style logic. Generally the software provides functions for debugging andtroubleshooting the PLC software, for example, by highlighting portions of the logic to show current status during operation or via simulation. The software will upload and download the PLC program, for backup and restoration purposes. In some models of programmable controller, the program is transferred from a personal computer to the PLC though a programming board which writes the program into a removable chip such as an EEPROM or EPROM.3.FunctionalityThe functionality of the PLC has evolved over the years to include sequential relay control, motion control, process control, distributed control systems and networking. The data handling, storage, processing power and communication capabilities of some modern PLCs are approximately equivalent to desktop computers. PLC-like programming combined with remote I/O hardware, allow a general-purpose desktop computer to overlap some PLCs in certain applications. Regarding the practicality of these desktop computer based logic controllers, it is important to note that they have not been generally accepted in heavy industry because the desktop computers run on less stable operating systems than do PLCs, and because the desktop computer hardware is typically not designed to the same levels of tolerance to temperature, humidity, vibration, and longevity as the processors used in PLCs. In addition to the hardware limitations of desktop based logic, operating systems such as Windows do not lend themselves to deterministic logic execution, with the result that the logic may not always respond to changes in logic state or input status with the extreme consistency in timing as is expected from PLCs. Still, such desktop logic applications find use in less critical situations, such as laboratory automation and use in small facilities where the application is less demanding and critical, because they are generally much less expensive than PLCs.In more recent years, small products called PLRs (programmable logic relays), and also by similar names, have become more common and accepted. These are very much like PLCs, and are used in light industry where only a few points of I/O (i.e. a few signals coming in from the real world and a few going out) are involved, and low cost is desired. These small devices are typically made in a common physical size and shape by several manufacturers, and branded by the makers of larger PLCs to fill out their low end product range. Popular names include PICO Controller, NANO PLC, and other names implying very small controllers. Most of these have between 8 and 12 digital inputs, 4 and 8 digital outputs, and up to 2 analog inputs. Size is usuallyabout 4" wide, 3" high, and 3" deep. Most such devices include a tiny postage stamp sized LCD screen for viewing simplified ladder logic (only a very small portion of the program being visible at a given time) and status of I/O points, and typically these screens are accompanied by a 4-way rocker push-button plus four more separate push-buttons, similar to the key buttons on a VCR remote control, and used to navigate and edit the logic. Most have a small plug for connecting via RS-232 or RS-485 to a personal computer so that programmers can use simple Windows applications for programming instead of being forced to use the tiny LCD and push-button set for this purpose. Unlike regular PLCs that are usually modular and greatly expandable, the PLRs are usually not modular or expandable, but their price can be two orders of magnitude less than a PLC and they still offer robust design and deterministic execution of the logic.4.PLC Topics4.1.FeaturesThe main difference from other computers is that PLCs are armored for severe conditions (such as dust, moisture, heat, cold) and have the facility for extensive input/output (I/O) arrangements. These connect the PLC to sensors and actuators. PLCs read limit switches, analog process variables (such as temperature and pressure), and the positions of complex positioning systems. Some use machine vision. On the actuator side, PLCs operate electric motors, pneumatic or hydraulic cylinders, magnetic relays, solenoids, or analog outputs. The input/output arrangements may be built into a simple PLC, or the PLC may have external I/O modules attached to a computer network that plugs into the PLC.4.2System scaleA small PLC will have a fixed number of connections built in for inputs and outputs. Typically, expansions are available if the base model has insufficient I/O.Modular PLCs have a chassis (also called a rack) into which are placed modules with different functions. The processor and selection of I/O modules is customised for the particular application. Several racks can be administered by a single processor, and may have thousands of inputs and outputs. A special high speed serial I/O link is used so that racks can be distributed away from the processor, reducing the wiring costs for large plants.4.3User interfacePLCs may need to interact with people for the purpose of configuration, alarmreporting or everyday control.A simple system may use buttons and lights to interact with the user. Text displays are available as well as graphical touch screens. More complex systems use a programming and monitoring software installed on a computer, with the PLC connected via a communication interface.4.4CommunicationsPLCs have built in communications ports, usually 9-pin RS-232, but optionally EIA-485 or Ethernet. Modbus, BACnet or DF1 is usually included as one of the communications protocols. Other options include various fieldbuses such as DeviceNet or Profibus. Other communications protocols that may be used are listed in the List of automation protocols.Most modern PLCs can communicate over a network to some other system, such as a computer running a SCADA (Supervisory Control And Data Acquisition) system or web browser.PLCs used in larger I/O systems may have peer-to-peer (P2P) communication between processors. This allows separate parts of a complex process to have individual control while allowing the subsystems to co-ordinate over the communication link. These communication links are also often used for HMI devices such as keypads or PC-type workstations.4.5ProgrammingPLC programs are typically written in a special application on a personal computer, then downloaded by a direct-connection cable or over a network to the PLC. The program is stored in the PLC either in battery-backed-up RAM or some other non-volatile flash memory. Often, a single PLC can be programmed to replace thousands of relays.Under the IEC 61131-3 standard, PLCs can be programmed using standards-based programming languages. A graphical programming notation called Sequential Function Charts is available on certain programmable controllers. Initially most PLCs utilized Ladder Logic Diagram Programming, a model which emulated electromechanical control panel devices (such as the contact and coils of relays) which PLCs replaced. This model remains common today.IEC 61131-3 currently defines five programming languages for programmable control systems: FBD (Function block diagram), LD (Ladder diagram), ST (Structured text, similar to the Pascal programming language), IL (Instruction list,similar to assembly language) and SFC (Sequential function chart). These techniques emphasize logical organization of operations.While the fundamental concepts of PLC programming are common to all manufacturers, differences in I/O addressing, memory organization and instruction sets mean that PLC programs are never perfectly interchangeable between different makers. Even within the same product line of a single manufacturer, different models may not be directly compatible.5.PLC compared with other control systemsPLCs are well-adapted to a range of automation tasks. These are typically industrial processes in manufacturing where the cost of developing and maintaining the automation system is high relative to the total cost of the automation, and where changes to the system would be expected during its operational life. PLCs contain input and output devices compatible with industrial pilot devices and controls; little electrical design is required, and the design problem centers on expressing the desired sequence of operations. PLC applications are typically highly customized systems so the cost of a packaged PLC is low compared to the cost of a specific custom-built controller design. On the other hand, in the case of mass-produced goods, customized control systems are economic due to the lower cost of the components, which can be optimally chosen instead of a "generic" solution, and where the non-recurring engineering charges are spread over thousands or millions of units.For high volume or very simple fixed automation tasks, different techniques are used. For example, a consumer dishwasher would be controlled by an electromechanical cam timer costing only a few dollars in production quantities.A microcontroller-based design would be appropriate where hundreds or thousands of units will be produced and so the development cost (design of power supplies, input/output hardware and necessary testing and certification) can be spread over many sales, and where the end-user would not need to alter the control. Automotive applications are an example; millions of units are built each year, and very few end-users alter the programming of these controllers. However, some specialty vehicles such as transit busses economically use PLCs instead of custom-designed controls, because the volumes are low and the development cost would be uneconomic.Very complex process control, such as used in the chemical industry, may require algorithms and performance beyond the capability of even high-performance PLCs. Very high-speed or precision controls may also require customized solutions; forexample, aircraft flight controls.Programmable controllers are widely used in motion control, positioning control and torque control. Some manufacturers produce motion control units to be integrated with PLC so that G-code (involving a CNC machine) can be used to instruct machine movements.PLCs may include logic for single-variable feedback analog control loop, a "proportional, integral, derivative" or "PID controller". A PID loop could be used to control the temperature of a manufacturing process, for example. Historically PLCs were usually configured with only a few analog control loops; where processes required hundreds or thousands of loops, a distributed control system (DCS) would instead be used. As PLCs have become more powerful, the boundary between DCS and PLC applications has become less distinct.PLCs have similar functionality as Remote Terminal Units. An RTU, however, usually does not support control algorithms or control loops. As hardware rapidly becomes more powerful and cheaper, RTUs, PLCs and DCSs are increasingly beginning to overlap in responsibilities, and many vendors sell RTUs with PLC-like features and vice versa. The industry has standardized on the IEC 61131-3 functional block language for creating programs to run on RTUs and PLCs, although nearly all vendors also offer proprietary alternatives and associated development environments.6.Digital and analog signalsDigital or discrete signals behave as binary switches, yielding simply an On or Off signal (1 or 0, True or False, respectively). Push buttons, limit switches, and photoelectric sensors are examples of devices providing a discrete signal. Discrete signals are sent using either voltage or current, where a specific range is designated as On and another as Off. For example, a PLC might use 24 V DC I/O, with values above 22 V DC representing On, values below 2VDC representing Off, and intermediate values undefined. Initially, PLCs had only discrete I/O.Analog signals are like volume controls, with a range of values between zero and full-scale. These are typically interpreted as integer values (counts) by the PLC, with various ranges of accuracy depending on the device and the number of bits available to store the data. As PLCs typically use 16-bit signed binary processors, the integer values are limited between -32,768 and +32,767. Pressure, temperature, flow, and weight are often represented by analog signals. Analog signals can use voltage or current with a magnitude proportional to the value of the process signal. For example,an analog 0 - 10 V input or 4-20 mA would be converted into an integer value of 0 - 32767.。
关于plc外文文献翻译

关于plc外文文献翻译外文文献翻译2014年6月Understanding the Basics of S7-200 Network Communications Selecting the Communication Interface for Your NetworkThe S7-200 is designed to solve your communications and networking needs by supporting not only the simplest of networks but also supporting more complex networks. The S7-200 also provides tools that allow you to communicate with other devices, such as printers and weigh scales which use their owncommunications protocols.The S7-200 supports many different types of communication networks. The selection of a network isperformed within the Set PG/PC Interface property dialog. A selected network is referred to as an Interface. The different types of interfaces available to access these communication networks are:1. PPI Multi-Master cables2. CP communication cards3. Ethernet communication cardsTo select the communication interface for STEP 7--Micro/WIN, you perform the following steps. See Figure 7-1.1. Double-click the icon in the Communications Setup window.2. Select the interface parameter fo12Figure 7-1 STEP 7--Micro/WINCommunications Interface第 1 页共 2 页PPI Multi-Master CablesThe S7-200 supports communication through two different types of PPI Multi-Master cables. These cable types permit communication through either an RS-232 or a USB interface.As shown in Figure 7-2, selecting the PPI Multi-Master cable type is simple. You perform the following steps:1. Click the Properties button on the Set PG/PC Interface property page.2. Click the Local Connection tab on the Properties page.3. Select the USB or the desired COM port123Figure 7-2 PPI Multi-Master Cable SelectionTipPlease note that only one USB cable can be used at a time.TipExamples in this manual use the RS-232/PPI Multi-Master cable. The RS-232/PPI Multi-Master cable replaces the previous PC/PPI cable. A USB/PPI Multi-Master cable is also available. Refer to Appendix E for order numbers. Using Master and Slave Devices on a PROFIBUS NetworkThe S7-200 supports a master-slave network and can function aseither a master or a slave in a PROFIBUS network, while STEP 7--Micro/WIN is always a master.第 2 页共 3 页MastersA device that is a master on a network can initiate a request to another device on the network. A master can also respond to requestsfrom other masters on the network. Typical master devices include STEP7--Micro/WIN, human-machine interface devices such as a TD 200, and S7-300 or S7-400 PLCs. The S7-200 functions as a master when it isrequesting information from another S7-200 (peer-to-peer communications).TipA TP070 will not work on a network with another master device.SlavesA device that is configured as a slave can only respond to requests from a master device; a slave never initiates a request. For most networks, the S7-200 functions as a slave. As a slave device, the S7-200 responds to requests from a network master device, such as an operator panel or STEP 7--Micro/WIN.Setting the Baud Rate and Network AddressThe speed that data is transmitted across the network is the baud rate, which is typically measured in units of kilobaud (kbaud) or megabaud (Mbaud). The baud rate measures how much data can betransmitted within a given amount of time. For example, a baud rate of 19.2 kbaud describes a transmission rate of 19,200 bits per second.Every device that communicates over a given network must be configured to transmit data at the same baud rate. Therefore, thefastest baud rate for the network is determined by the slowest device connected to the network.Table 7-1 lists the baud rates supported by the S7-200.Table 7-1 Baud Rates Supported by the S7-200Network Baud RateStandard Network 9.6 kbaud to 187.5 kbaud第 3 页共 4 页Using an EM 277 9.6 kbaud to 12 MbaudFreeport Mode 1200 baud to 115.2 kbaudThe network address is a unique number that you assign to eachdevice on the network. The unique network address ensures that the data is transferred to or retrieved from the correct device. The S7-200 supports network addresses from 0 to 126. For an S7-200 with two ports, each port has a network address. Table 7-2 lists the default (factory) settings for the S7-200 devices.Table 7-2 Default Addresses for S7-200 DevicesS7-200 Device Default AddressSTEP 7--Micro/WIN 0HMI (TD 200, TP, or OP) 1S7-200 CPU 2Setting the Baud Rate and Network Address for STEP7--Micro/WINYou must configure the baud rate and network address for STEP 7--Micro/WIN. The baud rate must be the same as the other devices on the network, and the network address must be unique.Typically, you do not change the network address (0) for STEP 7--Micro/WIN. If your network includes another programming package, you might need to change the network address for STEP 7--Micro/WIN.As shown in Figure 7-3, configuring the baud rate and network address for STEP 7--Micro/WIN is simple. After you click the Communications icon in the Navigation bar, you perform the following steps:第 4 页共 5 页\1234Figure 7-3 Configuring STEP 7--Micro/WINFigure 7-3 Configuring STEP 7--Micro/WIN1. Double-click the icon in the Communications Setup window.2. Click the Properties button on the Set PG/PC Interface dialog box.3. Select the network address for STEP 7--Micro/WIN.4. Select the baud rate for STEP 7--Micro/WIN.Setting the Baud Rate and Network Address for the S7-200You must also configure the baud rate and network address for theS7-200. The system block of the S7-200 stores the baud rate and networkaddress. After you select the parameters for the S7-200, you must download the system block to the S7-200.The default baud rate for each S7-200 port is 9.6 kbaud, and the default network address is 2.As shown in Figure 7-4, use STEP 7--Micro/WIN to set the baud rate and network address for the S7-200. After you select the System Block icon in the Navigation bar or select the View > Component > System Block menu command, you perform the following steps:1. Select the network address for the S7-200.2. Select the baud rate for the S7-200.第 5 页共 6 页3. Download the system block to the S7-200.12Figure 7-4 Configuring the S7-200 CPUTipSelection of all baud rate options is permitted. STEP 7--Micro/WIN validates this selection during the download of the System Block. Baud rate selections that would prevent STEP 7--Micro/WIN from communicating with the S7-200 are prevented from being downloaded.Setting the Remote AddressBefore you can download the updated settings to the S7-200, you must set both the communications (COM) port of STEP 7--Micro/WIN (local) and the address of the S7-200 (remote) to match the current setting of the remote S7-200. See Figure 7-5.After you download the updated settings, you may need to reconfigure the PG/PC Interface baud rate setting (if different from the setting used when downloading to the remote S7-200). Refer to Figure 7-3 to configure the baud rate.第 6 页共 7 页Figure 7-5 Configuring STEP 7--Micro/WINSearching for the S7-200 CPUs on a NetworkYou can search for and identify the S7-200 CPUs that are attached to your network. You can also search the network at a specific baud rate or at all baud rates when looking for S7-200s.Only PPI Multi-Master cables permit searching of all baud rates.This feature is not available if communicating through a CP card. The search starts at the baud rate that is currently selected.1. Open the Communications dialog box and double-click the Refresh icon to start the search.2. To search all baud rates, select the Search All Baud Rates check box. 2.Selecting the Communications Protocol for Your NetworkThe following information is an overview of the protocols supported by the S7-200 CPUs.1. Point-to-Point Interface (PPI)2. Multi-Point Interface (MPI)3. PROFIBUSFigure 7-6 Searching for CPUs on a Network第 7 页共 8 页Based on the Open System Interconnection (OSI) seven-layer model of communications architecture, these protocols are implemented on a token ring network which conforms to the PROFIBUS standard as defined in the European Standard EN 50170. These protocols are asynchronous, character-based protocols with one start bit, eight data bits, even parity, and one stop bit. Communications frames depend upon special start and stop characters, source and destination station addresses, frame length, and a checksum for data integrity. The protocols can run on a network simultaneously without interfering with each other, as long as the baud rate is the same for each protocol.Ethernet is also available for the S7-200 CPU with expansion modules CP243--1 and CP243--1 IT.PPI ProtocolPPI is a master-slave protocol: the master devices send requests to the slave devices, and the slave devices respond. See Figure 7-7. Slave devices do not initiate messages, but wait until a master sends them a request or polls them for a response.Masters communicate to slaves by means of a shared connection which is managed by the PPI protocol. PPI does not limit the number of masters that can communicate with any one slave; however, you cannot install more than 32 masters on the network.Figure 7-7 PPI NetworkS7-200 CPUs can act as master devices while they are in RUN mode, if you enable PPI master mode in the user program. (See the description of SMB30 in Appendix D.) After enabling PPI master mode, you can use the Network Read or the Network Write instructions to read from or write to other S7-200s.While the S7-200 is acting as a PPI master, it still responds as a slave to requests from other masters.第 8 页共 9 页PPI Advanced allows network devices to establish a logical connection between the devices. With PPI Advanced, there are a limited number of connections supplied by each device. See Table 7-3 for the number of connections supported by the S7-200.All S7-200 CPUs support both PPI and PPI Advanced protocols, while PPI Advanced is the only PPI protocol supported by the EM 277 module.Table 7-3 Number of Connections for the S7-200 CPU and EM 277 ModulesModule Baud Rate ConnectionsS7-200 CPU Port 0 9.6 kbaud, 19.2 kbaud, or 187.5 kbaud 4Port 1 9.6 kbaud, 19.2 kbaud, or 187.5 kbaud 4EM 277 Module 9.6 kbaud to 12 Mbaud 6 per moduleMPI ProtocolMPI allows both master-master and master-slave communications. See Figure 7-8. To communicate with an S7-200 CPU, STEP 7--Micro/WIN establishes a master--slave connection. MPI protocol does not communicate with an S7-200 CPU operating as a master.Network devices communicate by means of separate connections (managed by the MPI protocol) between any two devices. Communication between devices is limited to the number of connections supported by the S7-200 CPU or EM 277 modules. See Table 7-3 for the number of connections supported by the S7-200.For MPI protocol, the S7-300 and S7-400 PLCs use the XGET and XPUT instructions to read and write data to the S7-200 CPU. For information about these instructions, refer to your S7-300 or S7-400 programming manual.Figure 7-8 MPI Network第 9 页共 10 页PROFIBUS ProtocolThe PROFIBUS protocol is designed for high-speed communications with distributed I/O devices (remote I/O). There are many PROFIBUS devices available from a variety of manufacturers. These devices range from simple input or output modules to motor controllers and PLCs.PROFIBUS networks typically have one master and several slave I/O devices. See Figure 7-9. The master device is configured to know what types of I/O slaves are connected and at what addresses. The master initializes the network and verifies that the slave devices on the network match the configuration. The master continuously writes output data to the slaves and reads input data from them.Figure 7-9 PROFIBUS NetworkWhen a DP master configures a slave device successfully, it then owns that slave device. If there is a second master device on the network, it has very limited access to the slaves owned by the first master.TCP/IP ProtocolThe S7-200 can support TCP/IP Ethernet communication through the use of an Ethernet (CP 243--1) orInternet (CP 243--1 IT) expansion module. Table 7-4 shows the baud rate and number of connections supported by these modules. Table 7-4 Number of Connections for the Ethernet (CP 243--1) and the Internet (CP 243--1 IT)ModulesModule Baud Rate ConnectionsEthernet (CP 243--1) Module 10 to 100 Mbaud 8 general purpose connections第 10 页共 11 页1 STEP 7--Micro/WINInternet (CP 243--1 IT) ModuleconnectionRefer to the CP 243--1 Communications Processor for Industrial Ethernet Manual or the CP 243--1 IT Communications Processor for Industrial Ethernet and Information Technology Manual for additional information.第 11 页共 12 页中文翻译理解S7--200网络通讯的基本概念为网络选择通讯接口S7--200可以满足您的通讯和网络需求,它不仅支持简单的网络,而且支持比较复杂的网络。
电气工程及其自动化专业 外文文献 英文文献 外文翻译 plc方面
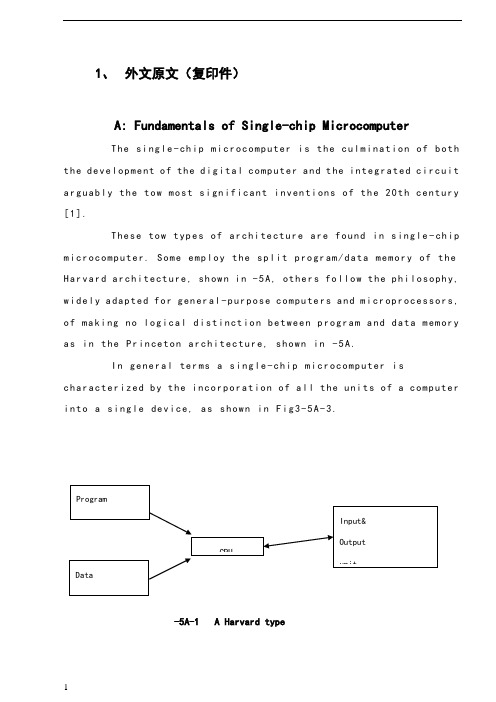
1、外文原文(复印件)A: Fundamentals of Single-chip MicrocomputerTh e si ng le-ch i p mi cr oc om pu ter is t he c ul mi nat i on o f bo th t h e d ev el op me nt o f th e d ig it al com p ut er an d t he int e gr at ed ci rc ui ta r gu ab ly th e t ow m os t s i gn if ic ant i nv en ti on s o f t h e 20t h c en tu ry[1].Th es e to w typ e s of a rc hi te ctu r e ar e fo un d i n s in gl e-ch ip m i cr oc om pu te r. So m e em pl oy t he sp l it p ro gr am/d ata me mo ry o f th e H a rv ar d ar ch it ect u re, sh ow n i n -5A, ot he rs fo ll ow th e ph i lo so ph y, w i de ly a da pt ed fo r g en er al-p ur pos e c om pu te rs an d m i cr op ro ce ss or s, o f m a ki ng no lo gi c al di st in ct io n b e tw ee n p ro gr am a n d da t a m em ory a s i n th e Pr in cet o n ar ch it ec tu re,sh ow n in-5A.In g en er al te r ms a s in gl e-chi p m ic ro co mp ut er i sc h ar ac te ri zed b y the i nc or po ra tio n of al l t he uni t s o f a co mp ut er i n to a s in gl e dev i ce, as s ho wn in Fi g3-5A-3.-5A-1 A Harvard type-5A. A conventional Princeton computerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM).R OM i s u su al ly f or th e p er ma ne nt, n o n-vo la ti le s tor a ge o f an a pp lic a ti on s pr og ra m .M an ym i cr oc om pu te rs an d mi cr oc on tr ol le r s a re in t en de d fo r h ig h-v ol ume a p pl ic at io ns a nd h en ce t he e co nom i ca l ma nu fa ct ure of t he d ev ic es r e qu ir es t ha t the co nt en ts o f the pr og ra m me mo ry b e co mm it te dp e rm an en tl y d ur in g th e m an uf ac tu re o f c hi ps . Cl ear l y, th is im pl ie sa ri g or ou s a pp roa c h t o R OM co de d e ve lo pm en t s in ce c ha ng es ca nn otb e m ad e af te r man u fa ct ur e .T hi s d e ve lo pm en t pr oce s s ma y in vo lv e e m ul at io n us in g a s op hi st ic at ed deve lo pm en t sy st em w i th a ha rd wa re e m ul at io n ca pa bil i ty a s we ll a s th e u se of po we rf ul so ft wa re t oo ls.So me m an uf act u re rs p ro vi de ad d it io na l RO M opt i on s byi n cl ud in g i n th ei r ra ng e de vi ce s wi th (or i nt en de d fo r us e wi th) u s er pr og ra mm ab le m em or y. Th e s im p le st of th es e i s us ua ll y d ev ice w h ic h ca n op er ate in a m ic ro pr oce s so r mo de b y usi n g so me o f th e i n pu t/ou tp ut li ne s as a n ad dr es s an d da ta b us f or acc e ss in g e xt er na l m e mo ry. T hi s t ype o f d ev ic e c an b e ha ve fu nc ti on al l y a s t he si ng le c h ip mi cr oc om pu te r fr om wh ic h i t i s de ri ve d a lb eit w it h r es tr ic ted I/O an d a mo di fie d e xt er na l ci rcu i t. T he u se o f t h es e RO Ml es sd e vi ce s is c om mo n e ve n in p ro du ct io n c ir cu it s wh er e t he v ol um e do es n o t ju st if y th e d e ve lo pm en t co sts of c us to m on-ch i p RO M[2];t he re c a n st il l b e a si g ni fi ca nt s a vi ng in I/O a nd ot he r c hi ps co mp ar ed t o a c on ve nt io nal mi cr op ro ce ss or b as ed c ir cu it. M o re e xa ctr e pl ac em en t fo r RO M d ev ic es c an b e o bt ai ne d in t he f o rm o f va ri an ts w i th 'pi gg y-ba ck'EP RO M(Er as ab le p ro gr am ma bl e ROM)s oc ke ts o rd e vi ce s w it h EP ROM i ns te ad o f R OM 。
plc单片机 毕业论文文献翻译 中英文对照

外文翻译:The monolithic In order to prevent without authorization the visit or the copy monolithic integrated circuit machine in the procedure, the majority of monolithic integrated circuits all has the encryption to lock the localization or the encryption byte, by protects the internal procedure. If in programming time encrypts locks the localization to enable (locking), is unable with the ordinary programming directly reading in the monolithic integrated circuit the procedure, this is the so-called copy protection or says the fixed function. In fact, such protective measures are very frail, is very easily explained. The monolithic integrated circuit aggressor with the aid of the special purpose equipment or the self-made equipment, using the monolithic integrated circuit chip design in loophole or the software flaw, through the many kinds of technical method, may withdraw the essential information from the chip, gains in the monolithic integrated circuit the procedure. Therefore, has the newest technology extremely as electronic products project engineer which the essential understanding current monolithic integrated circuit attacks, achieves knows oneself and the other side, knows fairly well, can effectively prevent oneself spends the product which the massive moneys and the time laboriously designs the matter occurrence which is counterfeited by a others night between.monolithic integrated circuits attacks technology:At present, attacks the monolithic integrated circuit mainly to have four kind of technologies, respectively is:This technical usual use processor correspondence connection and in the use agreement, the encryption algorithm or these algorithm security loophole carries on the attack. The software attack obtains the success a case in point is to early A T M E L A the T 89 C series monolithic integrated circuit attack. The aggressor has used in this series monolithic integrated circuit cleaning operation succession design loophole, uses from arranges the procedure to lock the localization after the cleaning encryption, stops the next step of cleaning internal program memory data the operation, thus makes to add the dense monolithic integrated circuit not to turn the encryption monolithic integrated circuit, then use programming read-out internal procedure.This technology usually monitors the processor by the high time resolution when the normal operation all power sources and the connection connection simulation characteristic, and through monitors its electromagnetic radiation characteristic to implement the attack. Because the monolithic integrated circuit is an active electronic device, when it carries out the different instruction, the corresponding mains input consumption also correspondingly changes. Like this analyzes and examines these changes through the use special electronic surveying instrument and mathematics statistical method, then gains in the monolithic integrated circuit the specific essential information.the mistake has the technology This technical use exceptionally working condition causes the processor to make a mistake, then provides the extra visit to carry on the attack. Uses the most widespread mistake to have the attack method including the voltage impact and the clock impact. The low voltage and the high voltage attack may usefor to forbid the protection circuit work or to fortected the information. The power source and the clock transient state jump may affect the single scroll instruction in certain processors the decoding and the ece the processor to carry out the misoperation. Perhaps the clock transient state jump can reposition the protection circuit but not to be able to destroy is proxecution.This technology is the direct exposed chip interior segment, then the observation, holds controls, disturbs the monolithic integrated circuit by to achieve the attack goal.In order to facilitate in order to, the people divide into above four kind of attacks technology two kinds, a kind is the invasion attack (physical attack), this kind of attack needs to destroy the seal, then with the aid of the semiconductor test facility, the microscope and the micro locator, several hours even several week time can complete on the special laboratory flower. All micro probes technology all belongs to the invasion attack. Moreover three methods belong to the non- invasion attack, the monolithic integrated circuit which attacks cannot by the physical damage. In certain situation non- invasion attacks is specially dangerous, this is because the non- invasion attack needs the equipment usually to be possible the self-restraint and the promotion, therefore is extremely inexpensive.The majority of non- invasions attack needs the aggressor to have the good processor knowledge and the software knowledge. Is opposite with it, the invasion probe attack then does not need too many initial knowledge,moreover usually may use the one whole set similar technology to cope with the width scope the product. Therefore, the attack often starts to the monolithic integrated circuit from the invasion reverse engineering, the accumulation experience is helpful to the development more inexpensive and the fast non- invasion attack technology.Last step will be seeks the protection melt silk the position and protects the melt silk to expose under the ultraviolet ray. With enlargement factor at least 100 time of microscopes, inputs the foot from the programming voltage the segment to track generally, seeks the protection melt silk.This technical use exceptionally working condition causes the processor to make a mistake, then provides the extra visit to carry on the attack. Uses the most widespread mistake to have the attack method including the voltage impact and the clock impact. The low voltage and the high voltage attack may use for to forbid the protection circuit work or to force the processor to carry out the misoperation. Perhaps the clock transient state jump can reposition the protection circuit but not to be able to destroy is protected the information. The power source and the clock transient state jump may affect the single scroll instruction in certain processors the decoding and the execution.(4) probe technologyThis technology is the direct exposed chip interior segment, then the observation, holds controls, disturbs the monolithic integrated circuit by to achieve the attack goal.In order to facilitate in order to, the people divide into above four kindof attacks technology two kinds, a kind is the invasion attack (physical attack), this kind of attack needs to destroy the seal, then with the aid of the semiconductor test facility, the microscope and the micro locator, several hours even several week time can complete on the special laboratory flower. All micro probes technology all belongs to the invasion attack. Moreover three methods belong to the non- invasion attack, the monolithic integrated circuit which attacks cannot by the physical damage. In certain situation non- invasion attacks is specially dangerous, this is because the non- invasion attack needs the equipment usually to be possible the self-restraint and the promotion, therefore is extremely inexpensive.The majority of non- invasions attack needs the aggressor to have the good processor knowledge and the software knowledge. Is opposite with it, the invasion probe attack then does not need too many initial knowledge,moreover usually may use the one whole set similar technology to cope with the width scope the product. Therefore, the attack often starts to the monolithic integrated circuit from the invasion reverse engineering, the accumulation experience is helpful to the development more inexpensive and the fast non- invasion attack technology.3 invasions attacks general process:The invasion attack first step uncovers the chip seal. Some two methods may achieve this goal: The first kind is dissolves the chip seal completely, the exposed metal segment. The second kind is only moves above the silicon nucleus plastic seal. The first method needs the chip to tests on the jig, with the aid of Taiwan to operate. The second method except needs to have the aggressor certain knowledge and Wants outside skill, but also needs individual wisdom and the patience, but operates relatively quite is convenient.Above the chip plastic may use the knife to open, around the chip epoxy resin may use the aqua fortis perish. The hot aqua fortis can dissolve the chip seal but not to be able to affect the chip and the segment. This process carries on generally under the extremely dry condition, because the water existence possibly can corrode already the aluminum wire connection which exposes.Then first uses the acetone in the supersonic pond to clean this chip by except the remaining nitric acid, then cleans with the clear water by and is dry except the salinity. Not the supersonic pond, jumps over generally this step. In this kind of situation, the chip surface can a little dirty, but not too affects the ultraviolet ray to the chip operation effect.Last step will be seeks the protection melt silk the position and protects the melt silk to expose under the ultraviolet ray. With enlargement factor at least 100 time of microscopes, inputs the foot from the programming voltage the segment to track generally, seeks the protection melt silk.If does not have the microscope, then uses the chip different partially exposes to the ultraviolet ray under and the observed result way carries on the simple search. When operation applies not the opaque slip of paper cover chipby to protect the program memory not by the ultraviolet ray cleaning. Will protect the melt silk to expose in the ultraviolet ray next 5 ~ 10 minutes can broken the protection position protective function, afterwards, will use the simple programming to be possible the direct readout program memory content.Regarding used the protective layer to protect E E P R O the M unit the monolithic integrated circuit to say that, the use ultraviolet ray repositioned the protection circuit is not feasible. Regarding this kind of type monolithic integrated circuit, uses the micro probe technology reading the memory content generally. Opens after the chip seal, puts in the chip under the microscope to be able very easy finding中文翻译单片机为了防止未经授权访问或拷贝单片机的机内程序,大部分单片机都带有加密锁定位或者加密字节,以保护片内程序。
PLC发展和未来中英文对照外文翻译文献

中英文资料对照外文翻译中英文对照外文翻译The development and future of PLCPart 1 PLC overviewProgrammable controller is the first in the late 1960s in the United States, then called PLC programmable logic controller (Programmable Logic Controller) is used to replace relays. For the implementation of the logical judgment, timing, sequence number, and other control functions. The concept is presented PLC General Motors Corporation. PLC and the basic design is the computer functional improvements, flexible, generic and other advantages and relay control system simple and easy to operate, such as the advantages of cheap prices combined controller hardware is standard and overall. According to the practical application of target software in order to control the content of the user procedures memory controller, the controller and connecting the accused convenient target.In the mid-1970s, the PLC has been widely used as a central processing unit microprocessor, import export module and the external circuits are used, large-scale integrated circuits even when the PLC is no longer the only logical (IC) judgment functions also have data processing, PID conditioning and data communications functions. International Electro technical Commission (IEC) standards promulgated programmable controller for programmable controller draft made the following definition : programmable controller is a digital electronic computers operating system, specifically for applications in the industrial design environment. It used programmable memory, used to implement logic in their internal storage operations, sequence control, timing, counting and arithmetic operations, such as operating instructions, and through digital and analog input and output, the control of various types of machinery or production processes. Programmable controller and related peripherals, and industrial control systems easily linked to form a whole, to expand its functional design. Programmable controller for the user, is a non-contact equipment, the procedures can be changed to change productionprocesses. The programmable controller has become a powerful tool for factory automation, widely popular replication. Programmable controller is user-oriented industries dedicated control computer, with many distinctive features.Part 2 History of PLCProgrammable Logic Controllers (PLC), a computing device invented by Richard E. Morley in 1968, have been widely used in industry including manufacturing systems, transportation systems, chemical process facilities, and many others. At that time, the PLC replaced the hardwired logic with soft-wired logic or so-called relay ladder logic (RLL), a programming language visually resembling the hardwired logic, and reduced thereby the configuration time from 6 months down to 6 days [Moody and Morley, 1999].Although PC based control has started to come into place, PLC based control will remain the technique to which the majority of industrial applications will adhere due to its higher performance, lower price, and superior reliability in harsh environments. Moreover, according to a study on the PLC market of Frost and Sullivan [1995], an increase of the annual sales volume to 15 million PLCs per year with the hardware value of more than 8 billion US dollars has been predicted, though the prices of computing hardware is steadily dropping. The inventor of the PLC, Richard E Morley, fairly considers the PLC market as a 5-billion industry at the present time.Though PLCs are widely used in industrial practice, the programming of PLC based control systems is still very much relying on trial-and-error. Alike software engineering, PLC software design is facing the software dilemma or crisis in a similar way. Morley himself emphasized this aspect most forcefully by indicating`If houses were built like software projects, a single woodpecker could destroy civilization.”Particularly, practical problems in PLC programming are to eliminate software bugs and to reduce the maintenance costs of old ladder logic programs. Though the hardware costs of PLCs are dropping continuously, reducing the scan time of the ladder logic is still an issue in industry so that low-cost PLCs can be used.In general, the productivity in generating PLC is far behind compared to other domains, for instance, VLSI design, where efficient computer aided design tools are inpractice. Existent software engineering methodologies are not necessarily applicable to the PLC based software design because PLC-programming requires a simultaneous consideration of hardware and software. The software design becomes, thereby, more and more the major cost driver. In many industrial design projects, more than of the manpower allocated for the control system design and installation is scheduled for testing and debugging PLC programs.In addition, current PLC based control systems are not properly designed to support the growing demand for flexibility and reconfigurability of manufacturing systems. A further problem, impelling the need for a systematic design methodology, is the increasing software complexity in large-scale projects.The objective of this thesis is to develop a systematic software design methodology for PLC operated automation systems. The design methodology involves high-level description based on state transition models that treat automation control systems as discrete event systems, a stepwise design process, and set of design rules providing guidance and measurements to achieve a successful design. The tangible outcome of this research is to find a way to reduce the uncertainty in managing the control software development process, that is, reducing programming and debugging time and their variation, increasing flexibility of the automation systems, and enabling software reusability through modularity. The goal is to overcome shortcomings of current programming strategies that are based on the experience of the individual software developer.Part 3 Now of PLCFrom the structure is divided into fixed PLC and Module PLC, the two kinds of PLC including CPU board, I/O board, display panel, memory block, power, these elements into a do not remove overall. Module type PLC including CPU module, I/O modules, memory, the power modules, bottom or a frame, these modules can be according to certain rules combination configuration.In the user view, a detailed analysis of the CPU's internal unnecessary, but working mechanism of every part of the circuit. The CPU control works, by it reads CPU instruction, interprets the instruction and executes instructions. But the pace of work by shock signal control.Unit work under the controller command used in a digital or logic operation.In computing and storage register of computation result, it is also among the controller command and work. CPU speed and memory capacity is the important parameters for PLC , its determines the PLC speed of work, IO PLC number and software capacity, so limits to control size.Central Processing Unit (CPU) is the brain of a PLC controller. CPU itself is usually one of the microcontrollers. Aforetime these were 8-bit microcontrollers such as 8051, and now these are 16-and 32-bit microcontrollers. Unspoken rule is that you’ll find mostly Hitachi and Fujicu microcontrollers in PLC controllers by Japanese makers, Siemens in European controllers, and Motorola microcontrollers in American ones. CPU also takes care of communication, interconnectedness among other parts of PLC controllers, program execution, memory operation, overseeing input and setting up of an output.System memory (today mostly implemented in FLASH technology) is used by a PLC for a process control system. Aside form. this operating system it also contains a user program translated forma ladder diagram to a binary form. FLASH memory contents can be changed only in case where user program is being changed. PLC controllers were used earlier instead of PLASH memory and have had EPROM memory instead of FLASH memory which had to be erased with UV lamp and programmed on programmers. With the use of FLASH technology this process was greatly shortened. Reprogramming a program memory is done through a serial cable in a program for application development.User memory is divided into blocks having special functions. Some parts of a memory are used for storing input and output status. The real status of an input is stored either as “1”or as “0”in a specific memory bit/ each input or output has one corresponding bit in memory. Other parts of memory are used to store variable contents for variables used in used program. For example, time value, or counter value would be stored in this part of the memory.PLC controller can be reprogrammed through a computer (usual way), but also through manual programmers (consoles). This practically means that each PLC controller can programmed through a computer if you have the software needed for programming. Today’s transmission computers are ideal for reprogramming a PLC controller in factory itself. This is of great importance to industry. Once the system is corrected, it is also important to read the right program into a PLC again. It is also good to check from time totime whether program in a PLC has not changed. This helps to avoid hazardous situations in factory rooms (some automakers have established communication networks which regularly check programs in PLC controllers to ensure execution only of good programs).Almost every program for programming a PLC controller possesses various useful options such as: forced switching on and off of the system input/outputs (I/O lines), program follow up in real time as well as documenting a diagram. This documenting is necessary to understand and define failures and malfunctions. Programmer can add remarks, names of input or output devices, and comments that can be useful when finding errors, or with system maintenance. Adding comments and remarks enables any technician (and not just a person who developed the system) to understand a ladder diagram right away. Comments and remarks can even quote precisely part numbers if replacements would be needed. This would speed up a repair of any problems that come up due to bad parts. The old way was such that a person who developed a system had protection on the program, so nobody aside from this person could understand how it was done. Correctly documented ladder diagram allows any technician to understand thoroughly how system functions.Electrical supply is used in bringing electrical energy to central processing unit. Most PLC controllers work either at 24 VDC or 220 V AC. On some PLC controllers you’ll find electrical supply as a separate module. Those are usually bigger PLC controllers, while small and medium series already contain the supply module. User has to determine how much current to take from I/O module to ensure that electrical supply provides appropriate amount of current. Different types of modules use different amounts of electrical current.This electrical supply is usually not used to start external input or output. User has to provide separate supplies in starting PLC controller inputs because then you can ensure so called “pure” supply for the PLC controller. With pure supply we mean supply where industrial environment can not affect it damagingly. Some of the smaller PLC controllers supply their inputs with voltage from a small supply source already incorporated into a PLC.Part 4 PLC design criteriaA systematic approach to designing PLC software can overcome deficiencies in thetraditional way of programming manufacturing control systems, and can have wide ramifications in several industrial applications. Automation control systems are modeled by formal languages or, equivalently, by state machines. Formal representations provide a high-level description of the behavior of the system to be controlled. State machines can be analytically evaluated as to whether or not they meet the desired goals. Secondly, a state machine description provides a structured representation to convey the logical requirements and constraints such as detailed safety rules. Thirdly, well-defined control systems design outcomes are conducive to automatic code generation- An ability to produce control software executable on commercial distinct logic controllers can reduce programming lead-time and labor cost. In particular, the thesis is relevant with respect to the following aspects.In modern manufacturing, systems are characterized by product and process innovation, become customer-driven and thus have to respond quickly to changing system requirements. A major challenge is therefore to provide enabling technologies that can economically reconfigure automation control systems in response to changing needs and new opportunities. Design and operational knowledge can be reused in real-time, therefore, giving a significant competitive edge in industrial practice.Studies have shown that programming methodologies in automation systems have not been able to match rapid increase in use of computing resources. For instance, the programming of PLCs still relies on a conventional programming style with ladder logic diagrams. As a result, the delays and resources in programming are a major stumbling stone for the progress of manufacturing industry. Testing and debugging may consume over 50% of the manpower allocated for the PLC program design. Standards [IEC 60848, 1999; IEC-61131-3, 1993; IEC 61499, 1998; ISO 15745-1, 1999] have been formed to fix and disseminate state-of-the-art design methods, but they normally cannot participate in advancing the knowledge of efficient program and system design.A systematic approach will increase the level of design automation through reusing existing software components, and will provide methods to make large-scale system design manageable. Likewise, it will improve software quality and reliability and will be relevant to systems high security standards, especially those having hazardous impact on the environment such as airport control, and public railroads.The software industry is regarded as a performance destructor and complexity generator. Steadily shrinking hardware prices spoils the need for software performance interms of code optimization and efficiency. The result is that massive and less efficient software code on one hand outpaces the gains in hardware performance on the other hand. Secondly, software proliferates into complexity of unmanageable dimensions; software redesign and maintenance-essential in modern automation systems-becomes nearly impossible. Particularly, PLC programs have evolved from a couple lines of code 25 years ago to thousands of lines of code with a similar number of 1/O points. Increased safety, for instance new policies on fire protection, and the flexibility of modern automation systems add complexity to the program design process. Consequently, the life-cycle cost of software is a permanently growing fraction of the total cost. 80-90% of these costs are going into software maintenance, debugging, adaptation and expansion to meet changing needs.Today, the primary focus of most design research is based on mechanical or electrical products. One of the by-products of this proposed research is to enhance our fundamental understanding of design theory and methodology by extending it to the field of engineering systems design. A system design theory for large-scale and complex system is not yet fully developed. Particularly, the question of how to simplify a complicated or complex design task has not been tackled in a scientific way. Furthermore, building a bridge between design theory and the latest epistemological outcomes of formal representations in computer sciences and operations research, such as discrete event system modeling, can advance future development in engineering design.From a logical perspective, PLC software design is similar to the hardware design of integrated circuits. Modern VLSI designs are extremely complex with several million parts and a product development time of 3 years [Whitney, 1996]. The design process is normally separated into a component design and a system design stage. At component design stage, single functions are designed and verified. At system design stage, components are aggregated and the whole system behavior and functionality is tested through simulation. In general, a complete verification is impossible. Hence, a systematic approach as exemplified for the PLC program design may impact the logical hardware design.Part 5 AK 1703 ACPFollowing the principle of our product development, AK 1703 ACP has highfunctionality and flexibility, through the implementation of innovative and reliable technologies, on the stable basis of a reliable product platform.For this, the system concept ACP (Automation, Control and Protection) creates the technological preconditions. Balanced functionality permits the flexible combination of automation, telecontrol and communication tasks. Complemented with the scalable performance and various redundancy configurations, an optimal adaptation to the respective requirements of the process is achieved.AK 1703 ACP is thus perfectly suitable for automation with integrated telecontrol technology as:• Telecontrol substation or central device• Automation unit with autonom ous functional groups• Data node, station control device, front-end or gateway• With local or remote peripherals• For rear panel installation or 19 inch assembly• Branch-neutral product, therefore versatile fields of application and high product stability• Versatile communication• Easy engineering• Plug & play for spare parts• Open system architecture• Scalable redundancy• The intelligent terminal - TM 1703The Base Unit AK 1703 ACP with Peripheral Elements has one basic system element CP-2010/CPC25 (Master control element) and CP-2012/PCCE25 (Processing and communication element) ,one bus line with max. 16 peripheral elements can be connected.CP-2010/CPC25 Features and FunctionsSystem Functions:• Central element,coordinating all system servicesCentral hub function for all connected basic system elements• Time managementCentral clock of the automation unitSetting and keeping the own clock`s time with a resolution of 10msSynchronization via serid communication via LAN or local• RedundancyV oting and change-over for redundant processing and communication elements of the own automation unitSupports voting and change-over by an external SCA-RS redundancy switchSupports applicational voting and change-over by an external system,e.g.a control system• SAT TOLLBOX|| connectionStoring firmware and parameters on a Flash CardCommunication:• Communication via installable protocol elements to any superior or subordinate automation unit• Automatic data flow routing• Priority based data transmission (priority control)• Own circular buffer and process image for each connected station(data keeping)• Redundant communication routesCommunication with redundant remote stations• Special application specific functions for dial-up trafficTest if stations are reachableProcess Peripherals:• T ransmission of spontaneous information objects from and to peripheral elements, via the serial Ax 1703 peripheral busFunctions for Automation:• Open-/closed-loop control function for the execution of freely definable user programs which are created with CAEX plus according to IEC 61131-3,ing function diagram technology512KB for user programApprox 50.000 variables and signals,2.000 of them retainedCycle of 10ms or a multiple thereofOnline testLoadable without service interruption• Redundant open-/closed-loop control functionsSynchronization via redundancy linkTransmission of periodic process information between the open-/closed-loop control function and the peripheral elements,via the serial Ax 1703 peripheral bus.PLC的发展和未来一、PLC概述可编程控制器是60年代末在美国首先出现的,当时叫可编程逻辑控制器PLC (Programmable Logic Controller),目的是用来取代继电器。
PLC及变频器技术论文中英文资料对照外文翻译文献综述

PLC及变频器技术中英文资料对照外文翻译文献综述PLC and inverter technology trends1. The development trend of the programmable controller“PLC is one kind specially for the digital operation operation electronic installation which applies under the industry environment designs. It uses may the coding memory, uses for in its internal memory operation and so on actuating logic operation, sequence operation, time, counting and arithmetic operation instructions, and can through digital or the simulation-like input and the output, controls each type the machinery or the production process. PLC and the related auxiliary equipment should according to form a whole easy with the industrial control system, easy to expand its function the principle to design.”In the 21st century, PLC will have a bigger development. Technologically speaking, computer technology's new achievement more will apply in the programmable controller's design and the manufacture, will have the operating speed to be quicker, the storage capacity to be bigger, an intelligent stronger variety to appear; Looked from the product scale that further develops to subminiature and the ultra-large direction; Looked from the product overcoatability that the product variety will be richer, the specification to be more complete, the perfect man-machine contact surface, the complete communication facility will adapt each industrial control situation demand well; Looked from the market that various countries will produce the multi-variety product the situation to break respectively along with the international competition aggravating, will present the minority several brand monopoly international market the aspect, will present the international general programming language; Looking from the network state of play, the programmable controller and other industrial control computer networkconstitution large-scale control system is the programmable controller technology development direction. Present computer collection and distribution control system DCS (Distributed Control System) had the massive programmable controller application. Is following computer network's development, the programmable controller takes the automation directed net and the international universal network important component, outside industry and industry numerous domain display more and more major function.2. Inverter technology development trendsInverter into the practical phase of more than 1 / 4 century during this period, the frequency converter technology as the basis of power electronics technology and microelectronics technology manager of a leap in the development, as the new power electronic devices and high-performance microprocessor The application of control technology and the development of increasingly high cost performance of the inverter, more and more small size, but manufacturers are still in constant frequency converter to achieve the further miniaturization and doing new efforts. From a technical point of view, with the frequency converter to further expand the market of the future, with the converter and inverter technology will be on the development of technologies in the following areas further development:(1) large capacity and small size;(2) high-performance and multi-function;(3) enhance the ease-of-use;(4) increase in life expectancy and reliability;(5) of pollution-free.Large capacity and small size of the power semiconductor devices will be with the development of continuous development. In recent years, driven by a voltage power semiconductor devices IGBT (Isolated Gate Bipolar Transistor, isolation gate bipolar transistors) has developed very rapidly and quickly into the traditional use of BJT (bipolar power transistor) and power MOSFET (FET) The various fields. In addition, the IGBT switching device for the IPM (Intelligent Power Module, IPM) and Monolithic Power IC chip will power switching devices and driving circuit, such as the protection of integrated circuits in the same package, with high performance andreliability The merits, with their high current and high pressure of the development of small and medium-sized converter will certainly be more widely used.With micro-electronics technology and semiconductor technology development, for Inverter CPU and semiconductor devices and a variety of sensors of getting higher and higher. With the frequency converter technology and the development of the growing maturity of the exchange governor, modern control theory are constantly new applications. These have further improved the performance of inverter provided the conditions. In addition, with the frequency converter to further promote the use and support are also constantly made new demands, the frequency converter manufacturers to continuously improve the performance and frequency converter functions in Inverter new efforts to meet user And the need for the fierce competition in the market in an invincible position.With the frequency converter market continues to expand, how to further enhance the ease-of-use inverter, so that the technical staff and even ordinary non-technical staff can quickly master the use of frequency converter technology has become manufacturers must consider the issue. Because only easy-to-use products can continue to acquire new customers and further expand the market, so the future of the new converter will be more easy to operate.With the development of semiconductor technology and the development of power electronics technology, the frequency converter used in the various components of the life and reliability are constantly improving, they will make their own life and the frequency converter to further increase reliability.In recent years, people have attached great importance to environmental issues, and thus a "green products" name. Therefore, the inverter, must also consider its impact on the surrounding environment.Promote the use of the frequency converter in the early stages of the noise problem was once a big problem. With the low-noise converter IGBT the emergence of this issue has basically been resolved. However, with the noise problem to solve, people's looks and a converter to the surrounding environment and the impact of other continuously explore new solutions. For example, the use of a diode-voltage converter and PWMinverter circuit converter, the frequency converter itself the high harmonics will bring supply voltage and current distortion, and at the same power to affect the other equipment. However, through the use of the frequency converter Rectifier circuit PWM, we can basically solve the problem. Although because of price and control technology and other aspects of the reasons for the current PWM converter has not been promoting the inverter, but, with the frequency converter technology development and the people of the importance of environmental issues.PLC及变频器技术的发展趋势1.可编程控制器的发展趋势可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
关于PLC的中英文献翻译工业控制系统

INDUSTRIAL AND COLLABORATIVECONTROL SYSTEMS 之五兆芳芳创作- A COMPLEMENTARY SYMBIOSIS –-Looking at today’s control system one can find a wide variety of implementations. From pure industrial to collaborative control system (CCS) tool kits to home grown systems and any variation in-between. Decisions on the type of implementation should be driven by technical arguments Reality shows that financial and sociological reasons form the complete picture. Any decision has it’s advantages and it’s drawbacks. Reliability, good documentation and support are arguments for industrial controls. Financial arguments drive decisions towards collaborative tools. Keeping the hands on the source code and being able to solve problems on your own and faster than industry are the argument for home grown solutions or open source solutions. The experience of many years of operations shows that which solution is the primary one does not matter, there are always areas where at least part of the other implementations exist. As a result heterogeneous systems have to be maintained. The support for different protocols is essential. This paper describes our experience with industrial control systems, PLC controlled turn key systems, the CCS tool kit EPICS and the operability between all of them.-INTRODUCTIONProcess controls in general started at DESY in the early 80th with the installation of the cryogenic control system for the accelerator HERA (Hadron-Elektron-Ring-Anlage). A new technology was necessary because the existing hardware was not capable to handle standard process controls signals like 4 to 20mA input and output signals and the software was not designed to run PID control loops at a stable repetition rate of 0.1 seconds. In addition sequence programs were necessary to implement startup and shutdown procedures for the complex cryogenic processes like cold boxes and compete compressor streets.Soon it was necessary to add interfaces to field buses and to add computing power to cryogenic controls. Since the installed D/3 system[1] only provided an documented serialconnection on a multibus board, the decision was made to implement a DMA connection to VME and to emulate the multibus board’s functionality. The necessary computing power for temperature conversions came from a Motorola MVME 167 CPU and the field bus adapter to the in house SEDAC field bus was running on an additional MVME 162.The operating system was VxWorks and the application was the EPICS toolkit.Since this implementation was successful it was also implemented for the utility controls which were looking for a generic solution to supervise their distributed PLC’s.A SELECTION OF PROCESS CONTROL SYSTEMS AT DESYDCS (D/3)As a result of a market survey the D/3 system from GSE was selected for the HERA cryogenic plant. The decision was fortunate because of the DCS character of the D/3. The possibility to expand the system on the display- and on the I/O side helped to solve the increasing control demands for HERA. The limiting factor for the size of the system is not the total number of I/O but the traffic on the communication network. This traffic is determined by the total amount of archived data not by the data configured in the alarm system.The technical background of this limitation is the fact that archived data are polled from the display servers whereas the alarms are pushed to configured destinations like alarm-files, (printer) queues or displays.SCADA Systems with DCS Features (Cube)The fact that the D/3 system mentioned above had some hard coded limitations with respect to the Y2K problem was forcing us to look for an upgrade or a WordStrment of the existing system. As a result of a call for tender the company Orsi with their product Cube came into play [2]. The project included a complete WordStrment of the installed functionality. This included the D/3 as well as the integration of the DESY field bus SEDAC and the temperature conversion in VME. The project started promising. But soon technical and organizational problemswere pushing the schedule to it’s limits wh ich were determined by the HERA shutdown scheduled at that time.The final acceptance test at the vendors site showed dramatic performance problems. Two factors could be identified as the cause of these problems. The first one was related to the under estimated CPU load of the 6th grade polynomial temperature conversion running at 1 Hz. The second one was the additional CPU load caused by the complex functionality of the existing D/3 system. Here it was underestimated that each digital and analog input and output channel had it’s own alarm limits in the D/3 system.In a SCADA like system as Cube the base functionality of a channel is to read the value and make it available to the system. Any additional functionality must be added. Last not least the load on the network for polling all the alarm limits –typically for a SCADA system –was also driving the network to it’s limits.Finally the contract with Orsi was cancelled and an upgrade of the D/3 system was the only possible solution. It was finally carried out in march 2003.In any case it should be mentioned that the Cube approach had the advantage of a homogeneous configuration environment (for the Cube front end controllers) –compared with heterogeneous environments for ‘pure’ SCADA systems.SCADA (PVSS-II)The H1 experiment at the HERA accelerator decided to use PVSS-II for an upgrade of their slow control systems[3].The existing systems were developed by several members of the H1 collaboration and were difficult to maintain. The decision to use PVSS as a WordStrment was driven by the results of an extensive survey carried out at CERN by the Joint Controls Project [4]. PVSS is a ‘pure’ Supervisory And Data Acquisition System (SCADA). It provides a set of drivers for several field buses and generic socket libraries to implement communication over TCP/IP. The core element is the so called event manager. It collects the data (mostly by polling) from the I/O devices and provides an event service to the attached management services like: control manager, database manager, user interface, API manager and the built in HTTP server. The PVSS scripting library allows to implement complex sequences as well as complex graphics.Compared with other SCADA systems PVSS comes with one basic feature: it provides a true object oriented API to the device’s data.One major disadvantage of SCADA systems is the fact that two databases, the one for the PLC and the one for the SCADA system must be maintained. Integrated environments try to overcome this restriction.EPICSEPICS has emerged at DESY from a problem solver to a fully integrated control system. Starting from the data collector and number cruncher for the cryogenic control system, EPICS made it’s way to become the core application for the DESY utility group. In addition it is used wherever data is available through VME boards or by means of Industry Pack (IP) modules. For those cryogenic systems which are not controlled by the D/3 system EPICS is used with it’s complete functionality. In total about 50 Input Output Controller (IOC) are operational processing about 25 thousand records.1 EPICS as a SCADA SystemThe utility group ( water, electrical power, compressed air, heating and air conditioning) is using a variety of PLC’s spread out over the whole DESY site. EPICS is used to collect the data from these PLC’s over Profibus (FMS and DP) and over Ethernet (Siemens H1 and TCP). The IOC’s provide the interfaces to the buses and collect the data. The built in alarm checking of the EPICS records is used to store and forward alarm states to the alarm handler (alh) of the EPICS toolkit. In addition tools like the channel archiver and the graphic display (dm2k) are used. The default name resolution (by UDP broadcast) and the directory server (name server) are used to connectclient and server applications over TCP. All of these are basically SCADA functions.The textual representation of all configuration files ( for the IOC, the graphic tool, the alarm handler and the archiver) provides a flexible configuration scheme. At DESY the utility group has developed a set of tools to create IOC databases and alarm configuration files from Oracle. Thisway the controls group provides the service to maintain the EPICS tools and the IOC’s while the users can concentrate on the equipment being controlled.2 EPICS as a DCS SystemBesides the basic components of a SCADA system EPICS also provides a full flavoured Input Output Controller (IOC).The IOC provides all of the function a DCS system requires, such as: a standard set of properties implemented in each record, built in alarm checking processed during the execution of each record; control records like PID etc.;configuration tools for the processing engine. The flexible naming scheme and the default display and alarm properties for each record ease the connection between the operator tools and the IOC’s. The flexible data acquisition supports the poll mode as well as the publish subscribe mode. The latter reduces the traffic drastically.PLC’sPLC’s provide nowadays the same rich functionality as it was known from stand alone control systems in the past.Besides the basic features like the periodic execution of a defined set of functions they also allow extensive communication over Ethernet including embedded http servers and different sets of communication programs.Besides the communication processors, display processors can be linked to PLC’s to provide local displays which can be comprised as touch panels for operator intervention and value settings.These kind of PLC’s are att ractive for turn key systems which are commissioned at the vendors site and later integrated into the customers control system.Intelligent I/ONew developments in I/O devices allow to ‘cluster’ I/O in even smaller groups and connect theses clustered I/O channels directly to the control system. PLC’s are not any more necessary for distributed I/O. Simple communication processors for any kind of field buses or for Ethernet allow an easy integration into the existing controls infrastructure.Little local engines can run IEC 61131 programs. Thedifferences between PLC’s and intelligent I/O subsystems fade away.FUNCTIONALITYThe ever lasting question why control systems for accelerators and other highly specialized equipment are often home grown or at least developed in a collaboration but only in rare cases commercial shall not be answered here. We try to summarize here basic functionalities of different controls approaches.Front-end ControllerOne of the core elements of a control system is the front-end controller. PLC’s can be used to implement most of the functions to control the equipment. The disadvantage is the complicated access to the controls properties. For instance all of the properties of a control loop like the P, I and D parameter, but also the alarm limits and other additional properties must be addressed individually in order to identify them in the communication protocol and last not least in the display-, alarm- and archive programs. In addition any kind of modifications of these embedded properties is difficult to track because two or more systems are involved. This might be one strong argument why control loops are mainly implemented on the IOC level rather than PLC’s.1 I/O and Control LoopsComplex control algorithms and control loops are the domain of DCS alike control systems. The support for sets of predefined display and controls properties is essential. If not already available (like in DCS systems) such sets of generic properties are typically specified throughout a complete control system (see namespaces).2 Sequence/ State programsSequence programs can run on any processor in a control system. The runtime environment depends on the relevance of the code for the control system. Programs fulfilling watchdog functions have to run on the front-end processor directly. Sequence programs for complicated startup and shutdown procedures could be run on a workstation as well.The basic functionality of a state machine can be even implemented in IEC 61131. Code generators can produce ‘C’ code which can be compiled for the runtime environment.3 Supported HardwareThe support for field buses and Ethernet based I/O is a basic functionality for SCADA type systems it is commercially available from any SCADA system on the market. The integration of specific hardware with specific drivers and data conversion is the hard part in a commercial environment. Open API’s or scripting support sometimes help to integrate custom hardware. If these tools are not provided for the control system it is difficult –if not impossible - to integrate custom hardware.New industrial standards like OPC allow the communication with OPC aware devices and the communication between control systems. One boundary condition for this kind of functionality is the underlying operating system. In the case of OPC it is bound to DCOM which is a Microsoft standard. UNIX based control systems have a hard time to get connected. Only control systems supporting multiple platforms can play a major role in a heterogeneous environments.As a result the limited support for custom- or specialized hardware may give reason for the development of a new control system.Display and OperationBesides the front-end system the operator interfaces play a major role for the acceptance of a control system. SCADA tools come with a homogeneous look and feel throughout their set of tools. Toolkits implemented in a collaboration might vary because the individual tools were developed by different teams.1 GraphicSynoptic displays are the advertising sign for any control system. Commercial synoptic displays come with a rich functionality and lots of special features. Starting to make use of all these features one will find out that all individualproperties of the graphic objects must be specified individually. Since SCADA systems must be generic they cannot foresee that an input channel does not only consist ofa value but also consists of properties like display ranges andalarm values. Defining all of these properties again and again can be a pretty boring job. Some systems allow to generate prototypes of graphic objects. These prototype or template graphics are complex and need a specialist to generate them.DCS or custom synoptic display programs can make use of the common set of properties each I/O point provides. This predefined naming scheme will fill in all standard property values and thus only require to enter the record – or device name into the configuration tool. A clear advantage for control systems with a notion of I/O objects rather than I/O points.2 AlarmingAlarms are good candidates to distinguish between different control system architectures. Those systems which have I/O object implemented also provide alarm checking on the front-end computer. Those systems which only know about I/O points have to add alarm checking into the I/O processing. While the I/O object approach allows to implement alarm checking in the native programming language of the front-end system, I/O point oriented systems typically have to implement this functionality in their nativescripting language. This is typically less efficient and error prone because all properties must be individually configured.This leads to a flood of properties. Not only the error states for each I/O point wind up to be individual I/O points but also the alarm limits and the alarm severity of each limit must be defined as I/O points if it is desired to be able to change their values during runtime.Besides this impact on the configuration side the processing and forwarding of alarms makes the difference between SCADA and DCS systems. Since SCADA systems inherently do not ‘know’ about alarms, each alarm state must be polled either directly from the client application or in advanced cases from an event manager which will forward alarm states to the clients. In any case a lot of overhead for ‘just’ checking alarm limits. DCS system again have the advantage that clients can either register themselves for alarm states und thus get the information forwarded or are configured to send alarmchanges to certain destinations spread around the control system. The latter case is only possible for systems which in total are configured with all the nodes taking part in the controls network.3 Trending and ArchivingTrending has become an important business in control systems architectures. Trends are necessary to trace error conditions or for post mortem and performance analysis of the controlled plant. Besides some custom implementations which are capable to store the data of complete control objects, most of the trending tools archive scalar data.Additional features like conditional trending or correlation plots make up the difference between individual implementations.4 Programming InterfacesWith respect to open programming interfaces PLC’s and DCS systems have a common strategy. They are running reliably because there’s no way to integrate custom code which could interfere with the internal processing. As a consequence the customer has to order ‘specials’ - which are extremely expensive – or forget about it and use the system as a black box.Since SCADA systems by definition must be able to communicate with a variety of I/O subsystems they already have some built in API’s which allow to integrate custom functionality.Specially collaborative systems need a certain openness to fulfill all the requirements from various development groups.Programming interfaces on all levels like font-end I/O, front-end processing, networking etc. are mandatory. A clear advantage for this type of system.5 RedundancyIf redundancy means the seamless switch which takes over all the states and all the values of the I/O and all states of all programs currently running, it is a domain of only a few DCS systems. Custom or CCS implementation do not provide this kind of functionality. Maybe because of the immense effort and the fact that it is only required in rare cases.Besides processor redundancy, redundant networks or I/O subsystems are available for certain commercial DCS systems. Again – a domain which is not covered by SCADA or CCS implementations.Advanced safety requirements may be covered byredundant PLC subsystems. These are for instance installed in (nuclear) power plants. Requirements for Personal Protection Systems (PPS) can sometimes only be fulfilled by redundant PLC’s. In process controls redundant PLC’s are only used in rare cases.6 NamespaceThe flat namespace of SCADA systems has already been described in the alarm section. Some SCADA systems (like PVSS-II) provide the notion of control objects or structured data which is a rare case. In all other cases so called field objects must be specified. These are objects which consist ofa list of properties (implemented as I/O points) and a set ofmethods ( implemented asmacros or function calls). One of these approaches is the UniNified Industrial COntrol System (UNICOS) at CERN [5].DCS systems and most of the custom/ collaborative systems are record –or device oriented. The difference being that typically one record is connected to a single I/O point and provides this way all sub features of a record implementation like individual engineering units, display- and alarm limits. The device oriented approach allows to connect several I/O points. The major difference being the fact that an object oriented device implementation provides methods and states for a device while (EPICS) records only serve a certain set of built in functions.Naming hierarchies are not specific to a type of implementation. They are available for some systems of any kind. For sure hierarchical naming schemes are desirable.IMPLEMENTATION STRATEGIESAfter having shown all the possible controls approaches it is time to have a look at the implementation of control systems.Starting from the I/O level one has to decide whether commercial solution are required, feasible or wanted.Special I/O does not always require custom solution for the font-end controller. Signals can be converted into standard signals but this does not apply for all kinds of signals.Resolution, repetition rates and signal levels might require custom developments which must be integrated into the overall control architecture. Even if the signals can not beconnected to standard I/O interfaces it might be possible to develop I/O controllers which implement a field bus interface which allow the integration with commercial control systems. Once this level of integration is not possible custom front-end controllers like VME crates come into play.Besides the decision whether special I/O requires dedicated custom solutions one has to decide who will do which part of the work? Does for instance the necessity of VME crates prohibit the delivery of a ‘turn key’ system built by industry?Or does a PLC based front-end system require a commercial SCADA system for high level controls?Turn Key SystemsIt is a clear trend in industry to deliver turn key systems. It allows a modular design of the whole system. Individual components can be subcontracted to several companies and tested locally. Once delivered to the construction site the primary acceptance tests have already been passed and the second phase, to integrate the subsystem into the global control system begins.While the detailed specification of control loops etc. is now part of the subsystems contract, the customer has to specify clearly how much information of the subsystem must be made available, what the data structures will look like and which connection (field bus/ Ethernet) will be used.Most turn key systems are delivered with PLC’s. The construction of the Swiss Light Source (SLS) has shown that also a VME based I/O system running a CCS – in this case EPICS – can be successfully commissioned [6].PLC Based SystemsPLC based systems are a consequence of the turn key ansatz. The next obvious approach might be to look besides commercial PLC’s also for commercial SCADA systems.The advantage is clearly the same like for the PLC: stable software, no programming – only configuration, support and good documentation. At DESY we have successfully established a relation between the controls group which provides a CCS service based on EPICS and the utility group which uses the EPICS configuration tools to set up their control environment. The big advantage though beingthat the EPICS code can be adjusted to the special requirements from both sides.Industrial SolutionsThe difference between CCS solutions and commercial solutions is fading away as soon as industry starts to deliver and support collaborative control systems. At KEK a company was contracted to supply programmers for the KEK-B upgrade. These programmers were trained in writing drivers and application code for EPICS. As a result the KEK-B control system is a mixture of software developed partly by industry and partly in house. This is another example for an industrial involvement for a CCS implementation.COSTThe question: “Was is the total cost of ownership (TCO) ofa PC?” has kept people busy since PC’s exist. The answersvary to all extremes. The question what is the TCO of a control system might give similar results.If you go commercial you have to pay for the initial licenses the implementation which is typically carried out by the supplier or by a subcontractor, and you pay for the on going software support which might or might not include the update license fee.If you go for a collaborative approach, you might contract a company or implement everything on your own. A question of ‘time and money’ as industry says. You will have more freedom and flexibility for your implementations but also a steeper learning curve. You can rely on the collaboration to provide new features and versions or you can contribute yourself. A major difference calculating the long term costs for a control system.At DESY one can roughly estimate that the (controls application)-support for a commercial approach – here D/3 - and the -support for a collaborative approach – here EPICS - is nearly the same. The software support and upgrade license fee is equivalent to one and a half FTE’s – which is about the manpower necessary to support new hardware and to upgrade EPICS.CONCLUSIONSDepending on the size and the requirements for a controls project the combination of commercial solutions and solutions based on a collaborative approach is possible in any rate between 0 and 100 percent. This applies for all levels from implementation to long term support. Special requirements on safety issues or a lack of manpower might turn the scale commercial. The necessity to interface special hardware, special timing requirements, the ‘having the code in my hands’ argument or the initial costs for commercial solutions will turn the scale collaborative. As long as collaborative approaches like EPICS stay up to date and run as stable and robust as commercial solutions, both will keep their position in the controls world in a complementary symbiosis.外文资料翻译外文翻译译文产业控制系统和协同控制系统当今的控制系统被普遍运用于许多领域.从单纯的产业控制系统到协同控制系统(CCS),控制系统不断变更,不竭升级,现在则趋向于家庭控制系统,而它则是这两者的变种.被应用的控制系统的种类取决于技巧要求.并且,实践标明,经济和社会因素也对此很重要.任何决定都有它的优缺点.产业控制要求可靠性,完整的文献记录和技巧支持.经济因素使决定趋向于协同东西.能够亲自接触源码并可以更快速地解决问题是家庭控制系统的要求.多年的操纵经验标明哪个解决办法是最主要的不重要,重要的是哪个可行.由于异类系统的存在,针对不合协议的支持也是至关重要的.本文介绍产业控制系统,PlC controlled turn key系统,和CCS 东西,以及它们之间的操纵.引言:80年代早期,随着为HERA(Hadron-Elektron-Ring-Anlage)加快器装置低温控制系统,德国电子同步加快器研究所普遍开始研究进程控制.这项新技巧是必须的,因为但是现有的硬件没有能力来处理尺度进程控制信号,如4至20毫安的电流输入和输出信号.并且软件无法在秒的稳定重复率下运行PID控制回路.此外,在实现对庞杂的低温冷藏系统的开闭进程中,频率项目显得尤为重要.有需要增加接口解决总线问题并增加运算能力,以便于低温控制.因为已装置的D / 3系统[1] 只提供了与多总线板串行连接,以实现DMA与VME的连接并用其模拟多总线板的功效.温度转换器的计较功效来自一个摩托罗拉MVME 167 CPU和总线适配器,以及一个MVME 162 CPU.其操纵系统是VxWorks,而应用程序是EPICS.由于对它的应用相当成功,其还被运用于正在寻找一个通用的解决筹划以监视他们的散布式PLC的公同事业办理.德国电子同步加快器研究所对进程办理系统的筛选集散控制系统(D/ 3):市场调查标明:来自GSE的D / 3系统被HERA低温冷藏工场选中.因为集散控制系统(D/ 3)的特性,所以这决定很不错.在展示端和I / O端扩展此系统的可能将有助于解决日益增加的HERA试验控制的要求.制约系统的大小的因素不是I / O的总数,通信网络的疏通与否.而通信网络的疏通与否取决于不存档的数据总量,不取决于报警系统中配置的数据.拥有DCS特点(Cube)的SCADA系统:相对于Y2K问题促使我们寻找一个升级版或代替版来代替现有的系统而言,以上提到的D / 3系统有一些硬编码的限制.由于急需给Orsi公司提供他们的产品,Cube开始起作用了[2].该项目包含装置功效的完全改换.这包含D / 3,以及德国电子同步加快器研究所的集成总线SEDAC和VME的温度转换器.该项目很有前景.但是因为HERA试验原定时间是有限制的,所以技巧问题和组织问题也迫使筹划提前.在供给商网站上的最后验收测试又出现了戏剧性的性能问题.有两个因素引起了这些问题.第一个跟低估在1赫兹运行的6级温度转换器的CPU负荷有关.第二个由现有D / 3系统庞杂的功效造成的额定负荷引起的.每个数字和模拟输入和输出通道在D / 3系统里的自身报警限值也被低估了.所有的附加功效都必须添加进去.最后,所有网络负载的报警限值,尤其是SCADA系统,也促使网络生成了限制.最后,与Orsi公司的合同被取消了.升级的D / 3系统是唯一可能的解决办法.在2003年3月,此系统最后被付诸实践.现在,相比“纯粹”SCADA系统的异质情况,Cube有同质配置情况的优势.SCADA(PVSS -Ⅱ):在HERA加快器上的H1实验中,实验人员为升级他们的低速控制系统,决定使用PVSS -Ⅱ.现有的系统是由H1协作组的几名成员开发的,而现在却难以维持了.在CERN由联合控制项目[4]进行的普遍调查促使他们做出使用PVSS作为代替品的决定.PVSS是一个“纯粹”的监控和数据收集系统(SCADA系统).其焦点元素叫做事件办理器.它收集的数据主要是由I/ O设备提供.它还提供附加的办理办事,如:控制经理,数据库办理,用户界面,API经理以及在建的HTTP办事器.该PVSS脚本库允许执行庞杂的序列以及庞杂的图形.相比其他SCADA系统PVSS带有一个根本特点:它提供了API给设备的数据.SCADA系统的一个主要缺点是其中的两个数据库,一个为PLC’s办事,另一个为SCADA系统办事,这两个数据库必须维持.集成情况将努力克服这个限制.EPICS:在德国电子同步加快器研究所,EPICS从问题解决系统演化成了全集成控制系统.从成为低温控制系统的数据收集器和数量控制器,EPICS成为了德国电子同步加快器研究所公用事业团体使用的焦点系统.此外,通过 Industry Pack(IP)模块的手段,它还能运用于通过VME板卡的任何数据.EPICS 通过其完整的功效,运用于没有由D / 3系统控制的低温冷藏系统.所有大约50个输入输出控制器运作大约25000业务处理记实.作为一个SCADA系统的EPICS:该公同事业组(水,电,压缩空气,加热和调温)使用各类散布在整个德国电子同步加快器研究所网站上的PLC.IOC向客户提供接口并收集数据.此外,如通道归档和图形显示(dm2k)会被使用.默认名决议和目录办事器(域名办事器)用于连接在TCP客户端和办事器应用程序.所有这些都是根本的SCADA功效.所有的配置文件(图形东西,报警处理程序和归档)提供了一种灵活的配置筹划.德国电子同步加快器研究所公用事业团体已制定了一套东西来创建IOC数据库和配置文件.这样,控制组提供的办事保持EPICS东西,而用户可以精力集中在被控制的设备上了.作为一个DCS系统的EPICS:作为SCADA系统的根本组成部分,EPICS还提供完整的输入输出控制器(IOC).IOC提供所有功效DCS系统要求,如:实施每个记实的尺度的属性;执行每个记实时的报警查抄进程;控制记实,如PID.灵活的命名筹划,默认的显示和每个记实的报警属性和缓了运作东西和IOC之间的连接.灵活的数据收集模式,支持调查模式以及宣布订阅模式.。
步进电机PLC控制技术中英文对照外文翻译文献

中英文对照外文翻译文献(文档含英文原文和中文翻译)The shallow treads into the PLC control technique and development trend of electrical engineering1. Say all:Along with the micro-electronics technique and the calculator technical hair Exhibition, the programmable preface controller has an advance by leaps and bounds of hair Exhibition, its function has already outrun a logic control far and far, in proper order The scope of control, it has an effect to combine with calculator, can enter Go to imitate to control most, have along range correspondence function etc.. Have-The person is called it the modern D industry controls of three pay pillar greatly(namely PLC, robot, CAD/CAM)it a, currently programmable controller BE applied in metallurgy extensively, Mineral industry, machine, light Class D realm, automate for the industry Provided to there is the tool of one dint The PLC controls of tread to open the wreath servo organization into the electrical engineering should Used for combining tool machine to produce an on-line number to control a slippery pedestal to control automatically Make, can the province go to the number of that unit to control system, making that unit The cost of controlling the system lowers.2、What is a stepper motor:Stepper motor is a kind of electrical pulses into angular displacement ofthe implementing agency. Popular little lesson: When the driver receives a step pulse signal, it will drive a stepper motor to set the direction of rotation at a fixed angle (and the step angle). You can control the number of pulses to control the angular displacement, so as to achieve accurate positioning purposes; the same time you can control the pulse frequency to control the motor rotation speed and acceleration, to achieve speed control purposes.What kinds of stepper motor sub-:In three stepper motors: permanent magnet (PM), reactive (VR) and hybrid (HB) permanent magnet stepper usually two-phase, torque, and smaller, step angle of 7.5 degrees or the general 15 degrees; reaction step is generallythree-phase, can achieve high torque output, step angle of 1.5 degrees is generally, but the noise and vibration are large. 80 countries in Europe and America have been eliminated; hybrid stepper is a mix of permanent magnet and reactive advantages. It consists of two phases and the five-phase: two-phase step angle of 1.8 degrees while the general five-phase step angle of 0.72 degrees generally. The most widely used Stepper Motor. What is to keep the torque (HOLDING TORQUE)3、Tread into the basic characteristics of electrical engineering:(1)、tread generally into the accuracy of the electrical engineering for tread into Cape of 3-5% and don't accumulate.(2)、tallest temperatures which enter electrical engineering outward appearance and allow tread and lead into the electrical engineering temperature high can make the magnetism material of electrical engineering back first, cause the dint descend thus is as for lose a step, so the electrical engineering outward appearance allow of the tallest temperature should be decided by small back with electrical engineering magnetism material and order; Speak generally, the magnetism material backs to order all above have in 130 C an of even be up to 200C above, so tread completely normal into the electrical engineering outward appearance temperature in 80-90C.(3)、dints which enter electrical engineering would with turn to go up but descend soon,While treading to turn to move into the electrical engineering,electrical engineering each electricity feeling which round a set mutually will become one anti- to electromotive force; The frequency is more high, anti- to electromotive force more big ,big in its function, the electrical engineering enlarges with the frequency(or speed) but mutually the electric current let up, causing the dint descend thus.(4)、can revolve normally when 4 enter electrical engineering low speed, but if high in certain the speed can't start, and the companion have a roar the interjection tread to have a technique parameter into the electrical engineering: empty carry start frequency, then tread into electrical engineering at empty carry under circumstance can start normally of pulse frequency, if the pulse frequency is high in should be worth., The electrical engineering can't start normally, the possible occurrence throws a step or blocks up to turn. Under the situation that there is one load, the start frequency should be much lower if want to make the electrical engineering attain high speed to turn to move, the pulse frequency should have an acceleration process, then start the frequency is lower, then press certain acceleration to rise the high hoped. Tread to show the characteristics of with it into the electric motor, turn ages of manufacturing to develop important use to accompany with in the numeral small together of numeral turn technical of development and tread into the electrical engineering technical exaltation,tread will get an application in more realms into the electrical engineering.4、enter an electrical engineering control system to constitute:Tread is a kind of performance organization that will give or get an electric shock a pulse conversion to move for the Cape into the electrical engineering. When tread to receive to a pulse signal into the actuator, it drives a step to press the direction of enactment to turn to move an angle for fixing to be called "tread to be apart from Cape" into the electrical engineering, it revolves one-step circulate with the fixed angle one step. Can pass control pulse piece to control a Cape to move to attain the purpose of assurance most and thus; Can pass control pulse frequency to control electrical engineering to become dynamic speed and acceleration in the meantime, the purpose attained to adjust thus soon treads into the electrical engineering. Can be the special kind electrical engineering that a kind of control uses, make use of it didn't accumulate error margin accuracy to 100 to divide 100 of characteristics, be suffused with to apply in various open a wreath control PLC which enter electrical engineering technique.5、Stepper motor of the PLC control technology:Make the importation tread to be subjected to a homologous control into total amount and pulse frequency of the importation pulse of electrical engineering. Establish the pulse signal occurrence that a pulse total amount and pulse frequency can control a machine therefore and in control,software; Can make use of PL in fixed time a machine composing for the frequency lower control pulse, the pulse frequency can pass in fixed time machine in fixed time constant control pulse period, the pulse amounts control then can establish a the pulse counter C10 be when the pulse number attain initial value, count machine C1.The action cuts off pulse back track, making it stop, the servo organization tread into the electrical engineering have no the pulse input then stop operation,servo performance organization fixed position be servo performance organization of when move speed to have higher request, can use PLC high-speed pulse,Different PLC it the frequency of high-speed pulse can reach to 4000-6000Hzses. The PLC is used to produce control pulse, passing PLC plait distance exportation several pulses certainly the control treads to turn Cape into the electrical engineering, programmable controller output's control the pulse enters electrical engineering to switch on electricity sequence to assign by the step homologous of round a set. The PLC controls of tread can go an allotment machine by adoption software wreath into the electrical engineering, the hardware wreath goes allotment machine to adopt the PLC resources that the soft wreath takes up more, Tread especially to round a set to count mutually into the electrical engineering big should consider adoption hardware wreath to go allotment machine well for large production line at 4, although the hardware structure is a little bit a little more complicated, can save an exportation importation of taking up the PLC point, the market has a various appropriation chips to choose to use currently. Tread to enlarge to several ten highest hundred folds into the output's control of the actuator PLC of the electrical engineering power pulse, volt, several Anne arrive several ten several Anne s drive an ability, the exportation of general PLC connects to have to certainly drive an ability, but inside usual transistor flow exportation to connect an ability only for ten several arrive several ten volts, several ten arrive several 100 million Anne but tread to then have several request into the electrical engineering to the power ten arrive up 100 volts, several Anne arrive several ten Anne s drive an ability so should adopt an actuator to output the pulse carry on enlarging.6、Application features of PLC(1)、High reliability, strong anti-interferenceHigh reliability is the key to performance of electrical control equipment. PLC as the use of modern large scale integrated circuit technology, using the strict production process, the internal circuits to the advanced anti-jamming technology, with high reliability. Constitute a control system using PLC, and the same size compared to relay contactor system, electrical wiring and switch contacts have been reduced to hundreds or even thousands of times, fault also greatly reduced. In addition, PLC hardware failures with self-detection, failure alarm timely information. In the application software, application are also incorporated into the peripheral device fault diagnosis procedure, the system is in addition to PLC circuits and devices other than the access protection fault diagnosis. In this way, the whole system extremely high reliability.(2)、Fully furnished, fully functional, applicabilityPLC to today, has formed a series products of various sizes, can be used for occasions of all sizes of industrial control. In addition to processing other than logic, PLC data, most of computing power has improved, can be used for a variety of digital control in the field. A wide variety of functional units in large numbers, so that penetration to the position of PLC control, temperature control, CNC and other industrial control. Enhanced communication capabilities with PLC and human-machine interface technology, using the PLC control system composed of a variety of very easily.(3)、Easy to learn, well engineering and technical personnel welcome PLC is facing the industrial and mining enterprises in the industrial equipment. It interfaces easily, programming language easily acceptable for engineering and technical personnel. Ladder language, graphic symbols and expressions and relay circuit very close to are not familiar with electronic circuits, computer principles and assembly language do not understand people who engage in industrial control to open the door.(4)、System design, the workload is small, easy maintenance, easy to transformPLC logic with memory logic instead of wiring, greatly reducing the control equipment external wiring, make the control system design and construction of the much shorter period, while routine maintenance is also easier up, even more important is to change the procedures of the same equipment has been changedproduction process possible. This is particularly suitable for many varieties, small batch production situations.7、The development trend of 5 domestic and international electrical engineering: (1)、continue along small scaled direction development turned along with electric motor application the realm open widely and each kind of whole machine is continuously small scaled to turn, the electric motor which requests with its kit have to also more and more small, at 57, the electric motor of 42 machine seat numbers applies many after years, now its machine seat number to 39,35,30,25 directions get down extension.(2 )、right nesses of electric motors carry on comprehensive design namely turn soon position to spread a feeling machine, decelerate the wheel gear etc. and electric motor essence to synthesize design together, so make it be able to constitute 1 to shut wreath system expediently, as a result have one more superior control function.(3)、to five mutually with three mutually the electric motor direction develop,Be suffused with currently applied of two mutually with four mutually the electric motor, its vibration and voice are bigger, but five mutually with three mutually the electric motor have advantage but in regard to these two kinds of electric motors, five mutually the electric motor drive electric circuit compare. 8、Conclusion:At present, the use of programmable process controller (that is, the PLC technology) can easily realize the control of motor speed and the position of the convenient, c onvenient for a variety of stepper motor operation, t o complete a variety of complex work. It represents the advanced industrial automation revolution; accelerate the realization of the electromechanical integration.浅析步进电机的PLC控制技术与发展趋势1、概述随着微电子技术和计算机技术的发展,可编程序控制器有一了突飞猛进的发展,其功能已远远超出了逻辑控制、顺序控制的范围,它与计算机有一效结合,可进行模拟最控制,具有一远程通信功能等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 Plc简介 从结构上分,PLC分为固定式和组合式(模块式)两种。固定式PLC包括CPU板、I/O板、显示面板、内存块、电源等,这些元素组合成一个不可拆卸的整体。模块式PLC包括CPU模块、I/O模块、内存、电源模块、底板或机架,这些模块可以按照一定规则组合配置。 在使用者看来,不必要详细分析CPU的内部电路,但对各部分的工作机制还是应有足够的理解。CPU的控制器控制CPU工作,由它读取指令、解释指令及执行指令。但工作节奏由震荡信号控制。运算器用于进行数字或逻辑运算,在控制器指挥下工作。寄存器参与运算,并存储运算的中间结果,它也是在控制器指挥下工作。CPU速度和内存容量是PLC的重要参数,它们决定着PLC的工作速度,IO数量及软件容量等,因此限制着控制规模。 PLC使用系统存储器(现在大部分采用闪存技术了)用于过程控制系统。除了这个操作系统之外,它还包括一个由梯形图翻译成而进制形式的用户程序。快擦型存储器(FLASH memory)的内容只有在改变用户程序的时候可以被改变。PLC控制器比快擦型存储器使用得更早,EPROM存储器比快擦型存储器也更早,快擦型存储器必须用紫外线(UV,Ultra-Violet Ray)灯擦除,并在编程器上进行编程。由于快擦型存储器技术的应用,使得这个过程大大缩短了。在应用程序开发中,通过一个串行电缆可以对程序存储器进行重新编程。 用户存储器被分成具有特殊功能的块。一部分存储器用来存储输入和输出状态。一个输入的实际状态存储状态存储在专用存储器位上,为“1”或者“0”。每一个输入和输出在存储器中都有一个相应的位。另外一部分存储器用来存储用户程序中的变量的内容。例如,定时器值,或者记数器值存放在存储器的这个部分。 PLC控制器可以通过计算机(通常方式)重新编程,但是也可以通过人工编程器9控制台)编程。实际上,这意味着,如果你有编程所需要的软件,早期PLC控制器可以通过计算机进行编程。今天的传输计算机是工厂自己对PLC控制器进行重新编程的理想设备。这对于工业企业来说是非常重要的。一旦系统修改结束,将正确的程序重新读入PLC控制器也是非常重要的。定期检查PLC中的程序是否改变是非常好的事情。这有助于避免车间发生危险情况(一些汽车制造商已经建立了通信网络,可以定期检查PLC中的程序,以保证运行的程序都是正确的)。 几乎所有用于为PLC控制器编程的程序都拥有各种不同的选项,例如系统输入/输出(I/O线)的强制开关,程序实时跟踪以及图表验证。图表验证对于理解、定义失败和故障非常必要。程序员可以添加标记,书日和输出设备名称,以及对于查找错误或者对于系统维护很有用的注释。添加注释和标记可以使技术人员(不仅仅是开发人员)很快理解梯形图。注释和标记甚至还可以准确地引用零件号,如果需要更换零件的话。这将加快由于损坏零件而引起的任何问题的修理速度。响应的旧方法是这样的,开发系统的人必须保护这个程序,他旁边再没有人知道系统是怎样完成的。正确的、备有证明文件的梯形图使任何技术人员都能彻底理解系统的功能。 电源是为中央处理单元提供电源的。大部分PLC控制器的工作电压为24VDC或者220VAC。在有些PLC控制器上,你可以看见作为独立模块的电源。用户必须确定从I/O模块取出多大电流来保证电源提供适当的电流。不同的模块使用不同的电流量。 该电源一般不用于启动外部输入或输出。用户必须提供独立的电源来启动PLC控制器的输入和输出,因为这样可以保证PLC控制器的所谓“纯电源”。使用纯电源意味着工业环境中的电源不会严重影响它。有些较小的PLC控制器从与PLC控制器集成在一起的小电源为它们的输入提供电压源。 2
二、开放和基于工业PC控制 PLC制造商已经开始注视基于工业PC控制技术所带来的强大冲击。有专家甚至认为,新商务活动所带来的新技术和开放技术规范将会埋葬传统PLC。PLC制造商认为,虽然在工业现场安装有大量的PLC控制设备,但他们仍然需要联合工控软件公司,以便开发他们自己的基于工业PC的过程控制软件。
诚然,几年前在工业现场明显存在着新旧PLC混合使用的情况,工业用户不得不同时学习相关的新旧知识,甚至彼此借鉴学习。大多数PLC制造商为工业用户仅仅提供了软逻辑和一种操作平台。
在高端应用方面,很难进一步区分PLC控制系统和工业PC控制系统之间的差异,因为这两者均采用了同样类型的微处理器和内存芯片。形象地打个比喻,如果你忘掉工业PC和PLC这些词语字面上的含义,那么在箱子里所能够观察到的恰恰是一些基本计算机硬件技术,我们更多观察到的却是那些基本技术的复杂化和混合体,这些技术被有效地组合到控制系统中去。 另外,采用开放控制的原因一方面是系统功能集成的需要,另一方面也是由于一些工业用户对功能过分苛求所致。如果能够给予高度的重视,就能够获得更多的基本技术知识。PLC制造商专注于系统功能化,而工业用户则专注于系统应用。人们可以看到,将来的发展趋势是将更多的功能进一步集成到一个控制箱内。因而像顺序控制和过程控制这样的事件将会采用功能化方式进行处理,其他像运动控制等也能够共享到相同的控制结构体系中。 可以相信,PLC技术将继续向开放式控制系统方向转移,尤其是基于工业PC的控制系统。后者除了在灵活性方面比传统PLC具有截然不同的优势外,还具有其他优点,如能够缩短系统投放到市场的周期,降低系统投资费用,提高从工厂底层到企业办公自动化的数据信息流动效率等。 关于工业PC控制系统的实时响应问题已经得到很好的解决,也许其主要的东西仍然隐藏在技术背后,但缺乏相应的跟踪记录。对于PLC来讲,坚固性是其主要特点之一,这已经有相当多的跟踪记录来验证。工业用户仍然非常小心地对待PLC,他们正在对PLC作不同的技术测试工作。在利用一种新技术时,工业用户需要考虑的问题是要冒多大的风险,同时需要考虑对其商务活动能够带来多少机会和收益。 但工业用户不完全相信开放式控制系统所带来的好处。随着技术的进一步发展,他们开始逐渐淡化这些思想观念。工业用户正在平衡采用新技术所存在的风险和给他们的商务活动所带来的收益,以便为今后的决策提供有效的保障。 工业PC技术提供了许多功能,能够增强PLC的功能特性,包括内藏视频和高速浮点数字协处理器。尽管Microsoft公司没有进一步提升该项功能特性的计划,但新的Windows CE 3.0完全能够更好地满足过程控制的需要。 不久前,Siemens公司公布了一套新的基于开放式控制系统的软件产品,即3.0版本的SIMATIC WinAC(Windows自动化中心)。WinAC是基于Windows NT,与SIMATIC S7 PLC兼容的适合于工业PC的控制系统解决方案。WinAC 3.0提供了具有较高集成度的Profibus现场总线局域网的连接性能,以及远程程序设计。此外,它还为现场控制设备本地化集成提供了一种新的DeviceNet I/O设备驱动程序,用于连接所安装的DeviceNet I/O设备。 Steeplechase 软件公司也已推出了一套支持硬实时过程控制的嵌入式Windows NT操作系统接口部件。该部件进一步结合了Steeplechase公司采用SBS技术并运行于Windows NT 3
环境的工业Compact PCI的硬实时控制软件。现在,Steeplechase公司的可视化逻辑控制器已经升级到5.0版。该控制器适合于Windows NT 4.0和Windows 2000两种操作系统,它的实时引擎能够直接与普通的Ethernet和TCP/IP集成在一起。5.0版本的控制器利用了一种增强型OPC服务器驱动程序,因而比以前的版本具有更快的运行速度。其他一些特点还包括新OI网络特性,以及能够让工业用户自己设计出丰富多彩的动态图形画面等。 Transysoft 公司最近推出了新版本的ISaGRAF系列工业控制组态软件包,即ISaGRAF PRO,它是基于IEC 61131-3国际标准,并独立于任何硬件平台的软逻辑自动化控制软件包。在一个网络化过程控制系统环境中,该软件包能够应用于多种组态和分布式控制系统的开发,它包含了一套开发工具、应用程序工作平台,以及相应的“虚拟机器”运行时目标。该运行时目标能够运行于各种各样的硬件平台。 CTC自动化工程公司已经发布了一套新的控制软件包MachineLogic PCLC(工业PC逻辑控制器),该软件可以让工业PC扮演PLC的角色,且仍然保持着工业PC的功能特性。该软件能够完成一台PLC所确定的控制任务,并且与程序执行时间一样快,均在1 ms以内;还能够同时处理多任务工作,但不能同时超过16个控制任务。一种具有优先级和多任务处理内核的机制保持着对每一件控制任务的跟踪,确保控制任务能够取得最高的优先权。该软件能够运行全部5种IEC 61131-3标准程序设计语言和PID控制程序,支持两种类型的I/O控制设备。一种是像Profibus和DeviceNet 等这样的现场总线I/O设备;另一种是像ISA和PC/104这样的工业PC I/O模板。另外,该软件还提供了对控制系统的在线编辑组态功能。程序可以在Windows 95/98和Windows NT下开发并运行,但也能够在RTXDOS下执行。 SoftPLC公司也提供了一种工控软件产品Tealware,有人非常形象地把这种软件产品称作穿着工业PC衣服的PLC。那些安装在支架上的控制系统已经有了小型 PLC的形状系数,但SoftPLC公司的控制软件已经被嵌入到CPU中。Tealware软件能够满足各种类型工业用户的需要,从小型、单机系统到大型、分散多控制工作站应用。其特点包括全系列I/O模件、内藏Ethernet和工业串行通信接口。 最近,Tealware软件已经升级到2.3版本。其中,控制软件提供了事实上无限的梯形图逻辑控制步序,同时允许有超过百万字的数据表;许多OI/SCADA应用接口;内藏Java引擎和 FTP服务器用于远程维护与管理;支持用户自己编写的C、C 、Java程序和设备驱动程序;适合于嵌入式Web服务器用;程序设计的在线运行模式;坚固的I/O模件支持能力和许多其他标准PLC功能;可以运行所输入的,或者是经过转换的A-B公司的PLC