基于HCS12X单片机的多传感器智能车控制系统设计
HCS12X微控制器Freescale MC9S12XHZ512数据手册说明书

MC9S12XHZ512Data SheetCoversMC9S12XHZ384, MC9S12XHZ256 HCS12XMicrocontrollersMC9S12XHZ512Rev. 1.0610/2010To provide the most up-to-date information,the revision of our documents on the World Wide Web will be the most current.Your printed copy may be an earlier revision.To verify you have the latest information available, refer to:/The following revision history table summarizes changes contained in this document. This document contains information for all constituent modules, with the exception of the S12X CPU. For S12X CPU information please refer to CPU12XV2 in the CPU12/CPU12X Reference Manual.Revision HistoryDate RevisionLevelDescriptionJanuary 5, 200601.00New BookApril 20, 200601.01Updated block guide versionsJuly 28, 200601.02Made minor correctionsJanuary 8, 200701.03Added MC9S12XHZ384 and MC9S12XHZ256August 20, 200701.04Updated slew ratesNovember 4, 200801.05Corrected typos on pinout diagramOctober 14, 201001.06Added PartID. Minor updates to ECT, SCI, IIC and XGATE sections.List of ChaptersChapter1MC9S12XHZ Family Device Overview . . . . . . . . . . . . . . . . . . .21 Chapter2Port Integration Module (S12XHZPIMV1). . . . . . . . . . . . . . . . .57 Chapter3512 Kbyte Flash Module (S12XFTX512K4V3). . . . . . . . . . . . .131 Chapter4 4 Kbyte EEPROM Module (S12XEETX4KV2) . . . . . . . . . . . . .175 Chapter5XGATE (S12XGATEV2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .209 Chapter6Security (S12X9SECV2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .323 Chapter7Clocks and Reset Generator (S12CRGV6). . . . . . . . . . . . . . .331 Chapter8Pierce Oscillator (S12XOSCLCPV1) . . . . . . . . . . . . . . . . . . . .371 Chapter9Analog-to-Digital Converter (ATD10B16CV4) . . . . . . . . . . . .377 Chapter10Liquid Crystal Display (LCD32F4BV1) . . . . . . . . . . . . . . . . . .411 Chapter11Motor Controller (MC10B12CV2). . . . . . . . . . . . . . . . . . . . . . .429 Chapter12Stepper Stall Detector (SSDV1). . . . . . . . . . . . . . . . . . . . . . . .461 Chapter13Inter-Integrated Circuit (IICV3) . . . . . . . . . . . . . . . . . . . . . . . .479 Chapter14Freescale’s Scalable Controller Area Network (MSCANV3).507 Chapter15Serial Communication Interface (SCIV5) . . . . . . . . . . . . . . . .561 Chapter16Serial Peripheral Interface (SPIV4) . . . . . . . . . . . . . . . . . . . . .599 Chapter17Periodic Interrupt Timer (PIT24B4CV1) . . . . . . . . . . . . . . . . .625 Chapter18Pulse-Width Modulator (PWM8B8CV1). . . . . . . . . . . . . . . . . .639 Chapter19Enhanced Capture Timer (ECT16B8CV3). . . . . . . . . . . . . . . .671 Chapter20Voltage Regulator (VREG3V3V5) . . . . . . . . . . . . . . . . . . . . . .725 Chapter21Background Debug Module (S12XBDMV2) . . . . . . . . . . . . . .739 Chapter22S12X Debug (S12XDBGV3) Module . . . . . . . . . . . . . . . . . . . .765 Chapter23External Bus Interface (S12XEBIV3). . . . . . . . . . . . . . . . . . . .807 Chapter24Interrupt (S12XINTV1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .831 Chapter25Memory Mapping Control (S12XMMCV3). . . . . . . . . . . . . . . .849Appendix A Electrical Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . .891 Appendix B Package Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .935 Appendix C PCB Layout Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .938 Appendix D Ordering Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .941 Appendix E Detailed Register Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .942Table of ContentsChapter1MC9S12XHZ Family Device Overview1.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211.1.1Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .221.1.2Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .241.1.3Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .241.1.4Device Memory Map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .261.1.5Part ID Assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30 1.2Signal Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .301.2.1Device Pinout. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .301.2.2Signal Properties Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331.2.3Detailed Signal Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .361.2.4Power Supply Pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45 1.3System Clock Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47 1.4Chip Configuration Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48 1.5Modes of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .491.5.1User Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .491.5.2Low-Power Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .501.5.3Freeze Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51 1.6Resets and Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .511.6.1Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .511.6.2Effects of Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 1.7COP Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 1.8ATD External Trigger Input Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55Chapter2Port Integration Module (S12XHZPIMV1)2.1lntroduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .572.1.1Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .572.1.2Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 2.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59 2.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .652.3.1Port A and Port B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .682.3.2Port C and Port D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .712.3.3Port E. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .732.3.4Port K. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .752.3.5Miscellaneous registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .772.3.6Port AD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .822.3.7Port L. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .872.3.8Port M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .912.3.9Port P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .962.3.10Port S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1022.3.11Port T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1072.3.12Port U. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1132.3.13Port V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1172.3.14Port W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121 2.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1252.4.1I/O Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1252.4.2Input Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1252.4.3Data Direction Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1262.4.4Reduced Drive Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1272.4.5Pull Device Enable Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1272.4.6Polarity Select Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1272.4.7Pin Configuration Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .127 2.5Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1282.5.1Reset Initialization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .128 2.6Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1292.6.1General. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1292.6.2Interrupt Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1302.6.3Operation in Stop Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .130Chapter3512 Kbyte Flash Module (S12XFTX512K4V3)3.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1313.1.1Glossary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1313.1.2Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1313.1.3Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1323.1.4Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132 3.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133 3.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1343.3.1Module Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1343.3.2Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136 3.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1503.4.1Flash Command Operations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1503.4.2Flash Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1533.4.3Illegal Flash Operations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .169 3.5Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1703.5.1Wait Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1703.5.2Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1703.5.3Background Debug Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1703.6Flash Module Security. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1703.6.1Unsecuring the MCU using Backdoor Key Access. . . . . . . . . . . . . . . . . . . . . . . . . . . .1713.6.2Unsecuring the MCU in Special Single Chip Mode using BDM . . . . . . . . . . . . . . . . .172 3.7Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1723.7.1Flash Reset Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1723.7.2Reset While Flash Command Active. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172 3.8Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1723.8.1Description of Flash Interrupt Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .173Chapter44 Kbyte EEPROM Module (S12XEETX4KV2)4.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1754.1.1Glossary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1754.1.2Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1754.1.3Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1754.1.4Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .176 4.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .176 4.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1764.3.1Module Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1764.3.2Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .179 4.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1874.4.1EEPROM Command Operations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1874.4.2EEPROM Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1904.4.3Illegal EEPROM Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204 4.5Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2054.5.1Wait Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2054.5.2Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2054.5.3Background Debug Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205 4.6EEPROM Module Security . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2054.6.1Unsecuring the MCU in Special Single Chip Mode using BDM . . . . . . . . . . . . . . . . .206 4.7Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2064.7.1EEPROM Reset Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2064.7.2Reset While EEPROM Command Active . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .206 4.8Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2064.8.1Description of EEPROM Interrupt Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .207Chapter5XGATE (S12XGATEV2)5.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2095.1.1Glossary of Terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2095.1.2Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2105.1.3Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2115.1.4Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211 5.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212 5.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2135.3.1Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213 5.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2295.4.1XGATE RISC Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2295.4.2Programmer’s Model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2295.4.3Memory Map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2305.4.4Semaphores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2315.4.5Software Error Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .232 5.5Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2335.5.1Incoming Interrupt Requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2335.5.2Outgoing Interrupt Requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233 5.6Debug Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2335.6.1Debug Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2335.6.2Entering Debug Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2345.6.3Leaving Debug Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235 5.7Security. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235 5.8Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2355.8.1Addressing Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2355.8.2Instruction Summary and Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2395.8.3Cycle Notation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2425.8.4Thread Execution. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2425.8.5Instruction Glossary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2425.8.6Instruction Coding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .315 5.9Initialization and Application Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3185.9.1Initialization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3185.9.2Code Example (Transmit "Hello World!" on SCI) . . . . . . . . . . . . . . . . . . . . . . . . . . . .318Chapter6Security (S12X9SECV2)6.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3236.1.1Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3236.1.2Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3236.1.3Securing the Microcontroller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3246.1.4Operation of the Secured Microcontroller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3256.1.5Unsecuring the Microcontroller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3266.1.6Reprogramming the Security Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3276.1.7Complete Memory Erase (Special Modes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .328Chapter7Clocks and Reset Generator (S12CRGV6)7.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3317.1.1Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3317.1.2Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3327.1.3Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .333 7.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3347.2.1V DDPLL and V SSPLL — Operating and Ground V oltage Pins. . . . . . . . . . . . . . . . . . . .3347.2.2XFC — External Loop Filter Pin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3347.2.3RESET — Reset Pin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334 7.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3347.3.1Module Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3357.3.2Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .336 7.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3507.4.1Functional Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3507.4.2Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3557.4.3Low Power Options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .356 7.5Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3657.5.1Description of Reset Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3657.5.2Clock Monitor Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3677.5.3Computer Operating Properly Watchdog (COP) Reset. . . . . . . . . . . . . . . . . . . . . . . . .3677.5.4Power On Reset, Low V oltage Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .367 7.6Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3687.6.1Real Time Interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3687.6.2PLL Lock Interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3697.6.3Self Clock Mode Interrupt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .369Chapter8Pierce Oscillator (S12XOSCLCPV1)8.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3718.1.1Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3718.1.2Modes of Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3718.1.3Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .372 8.2External Signal Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3728.2.1V DDPLL and V SSPLL — Operating and Ground V oltage Pins. . . . . . . . . . . . . . . . . . . .3728.2.2EXTAL and XTAL — Input and Output Pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3728.2.3XCLKS — Input Signal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .374 8.3Memory Map and Register Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .374 8.4Functional Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3748.4.1Gain Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3748.4.2Clock Monitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3748.4.3Wait Mode Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .375。
HCS12微控制器MC9S12DG128系统使用说明

MC9S12DG128实验使用手册目录第一章概述 (2)第二章硬件电路原理 (4)2.1子板硬件原理 (4)2.1.1、MCU引脚接口部分 (5)2.1.2、串口通信部分 (6)2.1.3、电源部分 (6)2.1.4、复位电路部分 (6)2.1.5、I/O端口电路部分 (7)2.1.6、晶振电路与BDM插头部分 (7)2.2母板硬件原理 (8)2.2.1、电源部分 (9)2.2.2、MC9S12DG128开发板与各接口部分 (9)2.2.3、串口通信部分 (11)2.2.4、LED数码管显示部分 (12)2.2.5、8位数字量输入输出部分 (13)2.2.6、红外发射接收部分 (15)2.2.7、LCD显示部分 (15)2.2.8、模拟量输入部分 (15)2.2.9、蜂鸣器和喇叭部分 (15)2.2.10、键盘输入部分 (16)2.2.11、继电器部分 (16)2.2.12、打印机部分 (17)2.2.13、CAN总线部分 (17)第三章MC9S12DG128教学平台快速入门 (18)3.1硬件连接 (18)3.2软件应用 (20)第一章概述天津工业大学Freescale MCU/DSP研发中心开发的DG128实验系统,其功能基本上和美国MCUSLK系统相同,而且根据中国的教学情况重新设计了一些功能、力求达到更好的实验效果。
DG128实验系统由主板和独立的MCU子板构成。
DG128实验系统的主板插槽和美国的MCUSLK系统相互兼容,主板的插槽可以插包括S12、S08、 HC08各系列MCU子板。
MCU子板可以单独调试运行,也可以插在主板上调试,充分利用主板丰富的硬件资源。
MC9S12DG128具有16位中央处理器(HCS12 CPU)、128KB Flash EEPROM、8KB RAM、2KB EEPROM,以及定时器通道、键盘中断和A/D通道等接口。
MC9S12DG128实验系统可以直接与CodeWarrior相连,具有下载程序、在线单步运行、断点调试、连续运行、修改寄存器和存储单元等特点,可以很方便的进行教学。
基于MC9S12XS128单片机的智能小车控制系统设计与实现
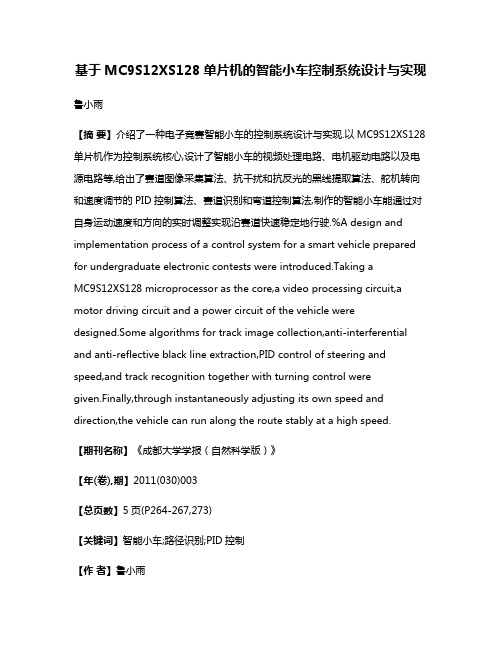
基于MC9S12XS128单片机的智能小车控制系统设计与实现鲁小雨【摘要】介绍了一种电子竞赛智能小车的控制系统设计与实现.以MC9S12XS128单片机作为控制系统核心,设计了智能小车的视频处理电路、电机驱动电路以及电源电路等,给出了赛道图像采集算法、抗干扰和抗反光的黑线提取算法、舵机转向和速度调节的PID控制算法、赛道识别和弯道控制算法,制作的智能小车能通过对自身运动速度和方向的实时调整实现沿赛道快速稳定地行驶.%A design and implementation process of a control system for a smart vehicle prepared for undergraduate electronic contests were introduced.Taking aMC9S12XS128 microprocessor as the core,a video processing circuit,a motor driving circuit and a power circuit of the vehicle were designed.Some algorithms for track image collection,anti-interferential and anti-reflective black line extraction,PID control of steering and speed,and track recognition together with turning control weregiven.Finally,through instantaneously adjusting its own speed and direction,the vehicle can run along the route stably at a high speed.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2011(030)003【总页数】5页(P264-267,273)【关键词】智能小车;路径识别;PID控制【作者】鲁小雨【作者单位】东南大学自动化学院,江苏南京211102【正文语种】中文【中图分类】TP2730 引言随着汽车电子业的发展,具有自动识别道路功能的智能汽车成为业界研究的重点.本文研究的智能小车的制作设计以CMOS摄像头作为路径识别传感器,以直流电机作为小车的驱动装置,通过舵机来控制小车的转向.本文不仅说明了整个智能小车控制系统的硬件和软件设计与实现,同时讨论了为进一步提高小车的稳定性和行驶速度对小车控制算法的设计要求.设计出的智能小车可以通过实时对自身运动速度和方向的调整来“沿赛道”快速行驶.1 系统总体设计我们设计的智能小车控制系统结构如图1所示.图1 智能车控制系统结构示意图如图1所示,该智能车控制系统以MC9S12XS128单片机作为控制系统的核心[1],通过黑白CMOS摄像头拍摄赛道图像并以PAL制式信号输出到信号处理模块(LM1881)进行视频同步信号分离,所得到图像和同步信号同时输入到单片机控制核心,单片机对信号进行判断处理后,通过改变PWM波脉宽实现对舵机转向的控制.舵机转向采用PD控制,通过光电编码器来检测车速并将速度反馈到单片机控制核心,用PID控制算法处理后得到的控制量去改变电机驱动模块的PWM波占空比,从而控制智能车的行驶速度.此外,控制系统还增加了路径识别的模块,对典型赛道进行决策控制,提高了智能小车的运行速度和稳定性.2 硬件电路设计智能小车控制系统硬件电路的总体设计本着可靠、高效、简洁的原则进行.系统的硬件电路包括控制系统核心电路、电源稳压电路、视频同步分离电路、电机驱动电路等.2.1 控制系统核心电路设计中,我们选取MC9S12XS128单片机作为控制系统核心.该单片机的CPU外部总线频率为8 MHz,内部运算速度可达25 MHz,其内部寄存器组中的寄存器、堆栈指针和变址寄存器均为16位.其为112引脚封装,有2个8路10位精度A/D转换器,脉宽调制模块(PWM)可设置成4路8位或者2路16位.在控制系统核心电路制作时,需要涉及一些普通的I/O口,单片机引脚规划如下:PS4-7,SPI下载; AN00-15,2个8路10位ADC;ANIN,输入视频模拟信号VIDEO;IRQ,输入视频行同步脉冲信号;PH5,输入奇偶场信号O/E;PWM5,舵机角度信号控制输出;PWM1、PWM3,输出电机控制信号.2.2 电源电路设计硬件电路的电源为7.2 V的镍铬电池,除了舵机需要的电压是7.2 V,可以直接输出以外,CMOS摄像头的工作电压为12 V,需要一个升压的电路,而单片机的标准供电电压、LM1881供电电压、光电编码器的供电电压均为5 V,因此还需要一个降压稳压电路.2.2.1 5 V电源降压稳压电路.5 V电源降压稳压电路如图2所示.图2 5 V电源降压稳压电路由于后轮驱动电机工作时电池电压压降较大,电路设计中必须采用低压降串联稳压芯片,以保证系统工作的稳定性,本电路选用2940稳压芯片来实现稳压.2.2.2 12 V电源升压电路.12 V电源升压电路如图3所示.图3 12 V升压电路MC34063芯片是一个单片机双极型线性集成电路,专用于直流—直流变换器控制的部分.MC34063芯片内包含了温度补偿带隙基准源、控制振荡器、驱动器和大电流输出开关,能输出1.5A的开关电流,故选取MC34063设计升压电路,可使用最少的外接元件就能够构成开关式升压变压器.2.3 视频处理电路智能小车视频信号中除了包含拍摄到的图像信号之外,还包括了行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号等,因此,必须准确地把握各个信号之间的时序逻辑关系,才能实现对视频信号的采集.LM1881是针对视频信号的同步分离芯片,它可以从0.5~2 V的标准负极性NTSC制、PAL制、SECAM制视频信号中提取复合同步、场同步、奇偶场识别等信号,然后将这些信号送到单片机控制核心,这些信号都是图像数字采集所需要的同步信号.视频同步分离电路设计如图4所示,其中,C32和R24构成一个简单滤波电路,使视频信号更平稳,C31和R26构成了一个复位电路.图4 视频同步分离电路2.4 电机驱动电路电机驱动电路如图5所示.图5 电机驱动电路MC33886是一款专用于电机驱动的高效单片集成芯片,它最高能够处理10 kHz频率的PWM调制脉冲,并且能够向负载电机提供高达5.0 A的电流.在设计中,我们采用两片MC33886芯片并联驱动,这样不仅可以提高电机的输入电流,增大电机的实际功率,使电机在不增加动力源的情况下大大的改善其性能,还能够减少MC33886芯片的功耗.3 软件系统设计由于智能小车采用CMOS摄像头作为传感器,因此图像采集处理和智能小车转向及速度的控制是整个软件的核心.软件系统中,图像信号采集算法采用直接边缘提取算法以及图像滤波算法得到黑线的位置,并通过动态阈值以实时适应比赛环境,同时,编写了赛道识别的算法,以实现对典型赛道的决策控制.智能小车舵机和电机的控制算法使用了鲁棒性很好的经典PID控制算法,配合使用实际参数补偿的方法,使小车在行驶的过程中达到了快速稳定的效果.系统软件设计的流程图如图6所示.图6 系统软件设计流程图3.1 图像采集算法设计图像采集算法[2]的流程图如图7所示.考虑到实际赛道只是在白色KT板上布置黑色引导线,因此,可以采用隔行采集的思想来压缩图像的数据.经过实际实验发现,智能小车的图像传感系统在单一方向上只要有40个像素的分辨力就足够用了,其前22行视频为场消隐信号,为均匀采样288行视频信号,可以采样场信号29行、36行……,即每隔7行采集一次即可.3.2 黑线提取算法设计黑线采用直接边缘提取算法[3],识别黑线后,可以通过求平均值计算黑线的中心点.为进一步消除外界因素的影响和十字交叉线的干扰,必须对图像滤波加以矫正,具体步骤为:(1)根据图像模型去噪.赛道的黑色引导线是绝对连续的,不可能出现全白行.当某一行求取的中心线位置与相邻的两行相差较大时,可认为该行错误,需采用中值滤波方法重新获得该行位置.图7 图像采集算法流程图(2)当出现两段黑线情况时,比如,赛道比较密集,或是“十”字交叉道,或是大“S”弯道,可保留最底下的一段,并增加路径识别的算法,给出适当的控制策略.(3)由于摄像头可能相对于赛道存在一定的倾斜角度,因此采集到的图像可能存在一定的梯形失真,可通过添加一个线性修正值来消除,该线性补偿系数通过实验来确定.3.3 舵机转向和速度调节PID控制算法设计智能小车的舵机转向和速度调节采用PID控制算法[4]来控制,它结构简单、稳定性好、工作可靠、调整也十分方便.3.3.1 速度的控制.速度控制采取的基本策略是弯道降速,直道提速.因此,控制中需要根据当前测速和路面弯道情况来决定当前速度,当前速度反馈值与当前设定速度存在的偏差,记为 e (k).那么就可以通过偏差值来调节当前的速度值.在计算机上实现PID算法时,可通过数字PID调节器采用增量型算法来实现,增量式为,其中因此,运用PID控制的关键就变为调整3个系数 q1,q2,q3,即参数整定,在具体PID 参数整定时,我们采取了简化的扩充临界比例度法[4].通过PID算法对速度的调整后,最终将经过图像提取算法处理后的黑线位置和对应的PID参照速度处理成二次曲线的关系,使得小车在直道和弯道相互过渡时加减速比较灵敏.3.3.2 舵机转向的控制.在舵机控制时,采用PD控制可以达到较好的效果,将P项认为是计算得到的黑线的位置和图像中心位置的偏差,而D项认为选定行的黑线位置与上幅图像中的黑线位置的差值.我们在实际测试中发现,增加P项系数可以增强小车的沿线能力,实现小车的转向提前,达到切弯的目的,但是若P系数太大,也会导致大半径弧线切弯过度.加入D项系数后,可以使小车入弯时转向提前,出弯时转向减少,对大S弯切线很有好处.通过适当的调节PD参数可以使小车灵活的运行.3.4 赛道识别和弯道控制算法设计典型赛道如图8所示.赛道主要分为直道、小S弯道、急转弯、十字交叉等几种.对于直道,以及比赛中小于15°的上下坡,配合PID控制算法,具有较好的控制效果.但对于别的赛道可通过路径识别算法判断当前所处的赛道,针对实际情况做出相应的控制处理.赛道识别算法具体步骤如下:图8 典型赛道示意图(1)选取赛道上间隔一定距离的黑点,计算所选n个黑点的位置x相对于视场中心的平均位置x—= x/n.(2)平均位置与视场中心绝对值之差表示了当前赛道的弯曲程度,其值的正负表示了是向左弯曲还是向右弯曲,其值越大表示拐弯半径越小.(3)通过适当的选取黑点的间隔,可以达到比较明显的区分效果,能够顺利的识别出急转弯与直道,而小S弯道可能被识别为直道,这正是设计所希望的,即在小S弯道可以直接加速冲过去而不会偏出赛道.(4)对于起点和十字赛道的识别可通过黑线赛道两旁黑线部分的长度来识别,通过适当的设定其宽度值的大小,可以顺利识别.顺利识别赛道后,还需要对典型赛道做出相应的处理,其处理方法如下:(1)起始线.在定时一段时间后执行判断程序(保证在起始的时候不会停下来),判断读入的包含了起始线的图像的场数大于一个给定值(由于摄像头的前瞻性,在终点之前的一段距离,摄像头就识别到了终点,为了冲过终点)就让电机输出0.(2)急转弯.要求小车在急转弯处能够立刻减速,而PID调节难达到理想效果,可以在识别到急转弯时,让小车电机输出负值,从而使小车的后轮反转,这样可以保证小车速度迅速降下来.4 结语本文详细说明了带CMOS摄像头的智能小车系统中硬件和软件的设计制作过程.图像采集时,采用了压缩图像的方法,通过提取黑线并实现了动态阈值的设定,利用PID 调节使得舵机和电机输出得到了较好的控制,路径识别和决策控制的添加,保证了智能小车在弯道上平稳快速的行驶.参考文献:[1]王威.HCS12微控制器原理及应用[M].北京:北京航空航天大学出版社,2005.[2]蔡波.视频实时图像处理系统研究及设计[J].电视技术, 2005,29(5):23-25.[3]董翠敏.一种有效的图像二值化方法在CCD传感器图像信息处理中的应用[J].成都大学学报(自然科学版), 2009,28(4):1-4.[4]Park K H,Bien Z,Hwang D H.A Study on the Robustness of a PID-type Iterative Learning Controller against Initial State Error [J].International Journal of Systems Science,1999,30(1):102 -135.[5]王勤.计算机控制技术[M].南京:东南大学出版社,2003.[6]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004.[7]杨加国.单片机C语言与汇编语言混合编程[J].成都大学学报(自然科学版),2008,27(3):1-4.。
智能车教程HCS12 微控制器IO

$001C PERP - Port P Pull Device Enable Reg.
PERP x 0 = Pull-up/down disabled 1 = Pull-up/down enabled
$001D PPSP x PPSP - Port P Polarity Select Reg.
0 = Falling edge on pin x sets corresponding PIFP Flag. (Pull-up device connected) 1 = Rising edge on pin x sets corresponding PIFP flag. (Pull-down device connected)
Port Integration Module
Input / Output
Logic Thresholds: High: 0.65 X Vdd = 3,25V Low : 0.35 X Vdd = 1,75V Drive current: Output High: 全功率: 12.5mA at Vdd -.8V 降功率: 1.25mA at Vdd -.8V Output Low: 全功率: -12.5mA at .8V 降功率: -1.25mA at .8V
$0027
J 端口
PTJ - Port J I/O Reg. DDRJ - Port J Direction Reg.
Address Offset $0028 A read returns latched value when configured for output or value at the input pin when when configured as input. Note: If both CAN4 and IIC are enabled, CAN Functionality takes precedence $002A DDRJ x = 0 Pin is Input = 1 Pin is Output
基于单片机控制的智能小车设计与制作1
武汉理工大学《单片机接口技术》课程设计说明书目录摘要 (1)1 引言 (1)2 方案论证 (2)2.1 控制核心的选择及其简介 (2)2.2 小车驱动方式的选择 (4)2.3 直流电机驱动模块 (5)2.4 障碍检测模块 (6)2.5 电源模块 (7)3 系统硬件设计 (8)3.1 车体结构及其驱动电路 (8)3.1.1 直流电机电路设计 (9)3.1.2 通道控制 (9)3.1.3 电机调速 (10)3.1.4 驱动模块 (11)3.2 避障模块 (12)3.3 硬件完成后的小车总体图 (13)4 系统软件设计 (14)4.1 主程序设计 (15)4.2 障碍检测模块程序设计 (15)4.3 语音播放程序设计 (17)5 使用说明 (20)总结与展望 (21)参考文献 (23)附录1 (24)附录2 (27)附录3 (31)基于单片机控制的智能小车设计与制作摘要: 课题的主要任务是设计并制作一辆智能小车,要求实现小车的语音控制、直线前进与倒退、避免撞到障碍物三大功能。
设计以80C51单片机为控制核心,应用光电传感器和超声波传感器,成功实现了小车的三大功能。
课题完成了红外线传感器、小车骨架、直流电机以及电源等硬件的选择、采购、各传感器的接口电路设计和制作,以及各传感器和电路的安装位置和方式的安排,并完成了整个硬件的制作工作。
此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。
关键词:智能小车、红外防碰撞传感器、单片机1 引言当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。
现在国外的自动控制和传感器技术已经达到了很高的水平,特别是日本,比如日本本田制作的机器人,其仿人双足行走已经做得十分逼真,而且具有一定的学习能力,还据说其智商已达到6岁儿童的水平。
基于电磁传感器的智能车控制系统设计

基于电磁传感器的智能车控制系统设计
张茜;杨旭海;薛令阳
【期刊名称】《电子元器件应用》
【年(卷),期】2012(14)11
【摘要】文中介绍一种基于电磁传感器路径识别的智能车控制系统,系统采用Freescale16位单片机MC9S12XS128为核心控制器,利用4个电磁传感器构成的传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的赛道快速平稳的行驶.实验证明:系统设计可靠,智能车运行良好.
【总页数】5页(P92-96)
【作者】张茜;杨旭海;薛令阳
【作者单位】石河子大学,新疆石河子832000;石河子大学,新疆石河子832000;石河子大学,新疆石河子832000
【正文语种】中文
【相关文献】
1.基于电磁传感器的智能车自主寻迹系统设计 [J], 师克;王洪军;李永科
2.基于电磁场寻线智能车传感器的布局及控制策略 [J], 杨阳;兰一星;袁靖
3.基于电磁传感器的智能车控制算法研究 [J], 张利民;张乐乐;刘颖涛
4.基于电磁三轮系统智能车的传感器排布方案与控制策略 [J], 魏磊;李兴旭;高琴;张猛;
5.基于电磁三轮系统智能车的传感器排布方案与控制策略 [J], 魏磊;李兴旭;高琴;张猛
因版权原因,仅展示原文概要,查看原文内容请购买。
FreeScale_HCS12系列单片机教程(dg128)

HCS12微控制器系列教程---第一讲:PWM 模块介绍该教程以MC9S12DG128单片机为核心进行讲解,全面阐释该16位单片机资源。
本文为第一讲,开始介绍S12 MCU的PWM模块。
PWM 调制波有8 个输出通道,每一个输出通道都可以独立的进行输出。
每一个输出通道都有一,一个周期控制寄存器和两个可供选择的时钟源。
每一个PWM 输出个精确的计数器(计算脉冲的个数)通道都能调制出占空比从0—100% 变化的波形。
PWM 的主要特点有:1、它有8 个独立的输出通道,并且通过编程可控制其输出波形的周期。
2、每一个输出通道都有一个精确的计数器。
3、每一个通道的PWM 输出使能都可以由编程来控制。
4、PWM输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM计数器为0时,改变周期和脉宽才起作用。
6、8 字节或16 字节的通道协议。
,他们提供了一个宽范围的时钟频率。
7、有4 个时钟源可供选择(A、SA、B、SB)8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每一个通道都可以通过编程实现左对齐输出还是居中对齐输出。
HCS12微控制器系列教程---第二讲:PWM 寄存器简介1、PWM启动寄存器PWMEPWME 寄存器每一位如图1所示:复位默认值:0000 0000B图1 PWME 寄存器每一个PWM 的输出通道都有一个使能位PWMEx 。
它相当于一个开关,用来启动和关闭相应通道的PWM 波形输出。
当任意的PWMEx 位置1,则相关的PWM输出通道就立刻可用。
用法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第一个波形可能是不规则的。
当输出通道工作在串联模式时(PWMCTL寄存器中的CONxx置1),那么)使能相应的16位PWM 输出通道是由PWMEx的高位控制的,例如:设置PWMCTL_CON01 = 1,通道0、1级联,形成一个16位PWM 通道,由通道1 的使能位控制PWM 的输出。
基于多传感器协同的智能循迹小车控制系统设计

勺 化
基 于多传感器协 同的智能循迹小车控制系统设计
Des i gn of i nt el l i gen t t r acki ng car cont r ol sy st em b ased on m ul t i - sensor cooper at i on
可靠性设计 ,改进后智 能小车循迹 可靠性和 过弯速度有大幅提升。 关键 词 :多传 感器协同 ;循迹小车 ;控制 系统 中图分类号 :T P 2 7 3 文献标 识码 :A 文章编 号 :1 0 0 9 - 0 1 3 4 ( 2 0 1 3 ) 1 1 ( 下) -O l 4 3 -0 5
控 制 系统 设 计 方 案 , 介 绍控 制 系统 的硬 件 组 成 、 软 件 设 计 和 控 制 策 略 ,并 将 所 开 发 的控 制 系统 装 车 进 行 验 证 试 验 ,为 智 能 循 迹 小 车 精 确 化 循 迹 及 车辆 控 制提 供 有益参 考 。
循迹 传 感器 3
马世典’ ,孔令晶 ,韩 牟 ,吴 狄’ ,唐 鑫’
MA S h i . d i a n ‘ ,K ONG L i n g - j i n g ,H AN Mo u ,W U D_ 1 'T AN G Xi n 。
( 1 . 江苏 大学 汽车工程研 究院 ,镇江 2 1 2 0 1 3 ;2 . 江苏大学 计算机与通信工程学 院,镇江 2 1 2 0 1 3 ) 摘 要 :介绍了基于多传感器协同的智 能循迹小 车控 制系 统设 计。研究 了小 车在各工况下工作情况 ,以 X Q 8 6 6 - 4 F R 为控制 核心 ,搭 建包含轨迹传感 器、轮速传感 器和转向角传 感器在内的多传 感器 协同控制 硬件系 统。设计 多传感 器协 同方 法以及多 路况控制策 略。开发 控制软件 并进行软件