基于密度方法的聚类
dbscan聚类方法
dbscan聚类方法【原创版3篇】目录(篇1)1.DBSCAN 聚类方法的概述2.DBSCAN 聚类方法的基本原理3.DBSCAN 聚类方法的算法流程4.DBSCAN 聚类方法的应用案例5.DBSCAN 聚类方法的优缺点正文(篇1)1.DBSCAN 聚类方法的概述DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类方法,该方法由 Rosenfeld 和 Eidelman 于 1995 年提出。
它主要通过计算数据点之间的密度来确定聚类,可以发现任意形状的聚类结构,并且对噪声数据具有较强的鲁棒性。
2.DBSCAN 聚类方法的基本原理DBSCAN 方法的基本原理是基于数据点的密度分布。
该方法将数据空间中的点分为核心点、边界点和噪声点三类。
其中,核心点是指其邻域内的点数量大于等于指定阈值的点;边界点是指其邻域内的点数量小于阈值且邻域内的点又与其他核心点相邻的点;噪声点是指其邻域内的点数量小于阈值且邻域内的点不与其他核心点相邻的点。
通过将核心点之间的连接关系形成聚类,可以得到最终的聚类结果。
3.DBSCAN 聚类方法的算法流程DBSCAN 聚类方法的算法流程主要包括两个步骤:(1)确定核心点:遍历数据集中的每一个点,计算其邻域内的点数量,将数量大于等于阈值的点标记为核心点。
(2)形成聚类:对于核心点,将其邻域内的点也标记为为核心点,并将这些核心点之间的连接关系形成聚类。
4.DBSCAN 聚类方法的应用案例DBSCAN 聚类方法在许多领域都有广泛应用,例如数据挖掘、生物信息学、图像处理等。
以图像处理为例,通过对图像像素进行密度划分,可以识别出图像中的目标物体,从而实现目标检测和识别。
5.DBSCAN 聚类方法的优缺点优点:(1)可以发现任意形状的聚类结构;(2)对噪声数据具有较强的鲁棒性;(3)算法具有较强的可扩展性,可以处理大规模数据集。
ArcGIS应用之基于密度的聚类分析
ArcGIS应用之基于密度的聚类分析我们生活在数据大爆炸时代,每时每刻都在产生海量的数据如视频,文本,图像和博客等。
由于数据的类型和大小已经超出了人们传统手工处理的能力范围。
聚类,作为一种最常见的无监督学习技术,可以帮助人们给数据自动打标签,已经获得了广泛应用。
聚类的目的就是把不同的数据点按照它们的相似与相异度分割成不同的簇(注意:簇就是把数据划分后的子集),确保每个簇中的数据都是尽可能相似,而不同的簇里的数据尽可能的相异。
从模式识别的角度来讲,聚类就是在发现数据中潜在的模式,帮助人们进行分组归类以达到更好理解数据的分布规律。
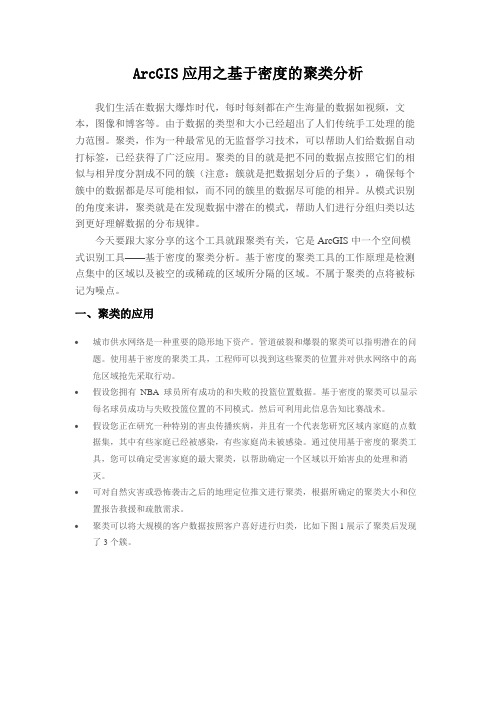
今天要跟大家分享的这个工具就跟聚类有关,它是ArcGIS中一个空间模式识别工具——基于密度的聚类分析。
基于密度的聚类工具的工作原理是检测点集中的区域以及被空的或稀疏的区域所分隔的区域。
不属于聚类的点将被标记为噪点。
一、聚类的应用•城市供水网络是一种重要的隐形地下资产。
管道破裂和爆裂的聚类可以指明潜在的问题。
使用基于密度的聚类工具,工程师可以找到这些聚类的位置并对供水网络中的高危区域抢先采取行动。
•假设您拥有NBA 球员所有成功的和失败的投篮位置数据。
基于密度的聚类可以显示每名球员成功与失败投篮位置的不同模式。
然后可利用此信息告知比赛战术。
•假设您正在研究一种特别的害虫传播疾病,并且有一个代表您研究区域内家庭的点数据集,其中有些家庭已经被感染,有些家庭尚未被感染。
通过使用基于密度的聚类工具,您可以确定受害家庭的最大聚类,以帮助确定一个区域以开始害虫的处理和消灭。
•可对自然灾害或恐怖袭击之后的地理定位推文进行聚类,根据所确定的聚类大小和位置报告救援和疏散需求。
•聚类可以将大规模的客户数据按照客户喜好进行归类,比如下图1展示了聚类后发现了3个簇。
图1 聚类的应用举例二、功能定义聚类算法很多,包括基于划分的聚类算法(如:k-means),基于层次的聚类算法(如:BIRCH),基于密度的聚类算法(如:DBSCAN),基于网格的聚类算法( 如:STING )等等。
时间序列聚类方法

时间序列聚类方法引言时间序列数据是在不同时间点上收集的数据,具有时间上的依赖关系和内在的序列性质。
时间序列聚类是将相似的时间序列数据分组,以便于分析和理解数据集中的模式和结构。
在本文中,将介绍几种常见的时间序列聚类方法及其应用。
一、K-means聚类算法K-means聚类算法是一种经典的聚类方法,通过迭代计算数据点与聚类中心之间的距离,并将数据点分配给与其最近的聚类中心。
该方法在时间序列聚类中的应用需要将时间序列数据转化为一维向量,例如通过提取统计特征或使用傅里叶变换等方法。
然后,可以使用K-means算法将时间序列数据进行聚类,以发现数据中的模式和结构。
二、基于密度的聚类算法基于密度的聚类算法是一种基于数据点密度的聚类方法,通过将数据点分配到高密度区域形成簇。
在时间序列聚类中,可以使用基于密度的聚类算法来发现数据中的异常点和突变点。
一种常见的基于密度的聚类算法是DBSCAN算法,它通过定义半径和最小密度来确定核心点、边界点和噪音点,并将核心点连接形成簇。
三、层次聚类算法层次聚类算法是一种自底向上或自顶向下的聚类方法,通过计算数据点之间的相似度或距离来构建聚类树。
在时间序列聚类中,可以使用层次聚类算法来发现数据中的层次结构和模式。
一种常见的层次聚类算法是凝聚层次聚类算法,它从每个数据点作为一个簇开始,然后迭代地合并相似的簇,直到达到预定的簇数目。
四、基于模型的聚类算法基于模型的聚类算法是一种将时间序列数据建模为概率模型或统计模型来进行聚类的方法。
在时间序列聚类中,可以使用基于模型的聚类算法来发现数据中的潜在分布和生成模式。
一种常见的基于模型的聚类算法是高斯混合模型聚类算法,它假设数据由多个高斯分布组成,并通过最大似然估计来估计模型参数。
五、动态时间规整聚类算法动态时间规整聚类算法是一种将时间序列数据进行规整化后进行聚类的方法。
在时间序列聚类中,由于数据点之间的时间差异和长度差异,可以使用动态时间规整聚类算法来处理这些问题。
基于密度的最佳聚类数确定方法.

基于密度的最佳聚类数确定方法.基于密度的最佳聚类数确定方法[关键字]聚类评估,聚类数,聚类有效性指标0 引言聚类是数据挖掘研究中重要的分析手段,其目的是将数据集中对象聚集成类,使得同一类中的对象是相似的,而不同类中的对象是不同的。
迄今研究者已经提出了为数众多的聚类算法,并已经在商务智能、图形分析、生物信息等领域得到了广泛应用。
作为一种非监督学习的方法,对学习得到的聚类结果进行评估是非常有必要的。
因为许多聚类算法需要用户给定数据集的聚类数量,而在实际应用中这通常是事先不知道的。
确定数据集的聚类数问题目前仍是聚类分析研究中的基础性难题之一 [1][2]。
聚类评估用于评价聚类结果的质量,这被认为是影响聚类分析成功与否的重要因素之一[3]。
它在聚类分析过程中的位置如图1所示。
聚类评估的一些重要问题包括确定数据集的聚类趋势、确定正确的类个数、将聚类分析结果与已知的客观结果比较等,本文主要研究其中的最佳聚类数的确定。
通常最佳聚类数的确定是通过以下计算过程来确定的。
在给定的数据集上,通过使用不同的输入参数(如聚类数)运行特定的聚类算法,对数据集进行不同的划分,计算每种划分的聚类有效性指标,最后比较各个指标值的大小或变化情况,符合预定条件的指标值所对应的算法参数被认为是最佳的聚类数 [4]。
迄今为止,已有各种类型的度量指标从不同角度来评估数据集划分的有效性,这些指标称为聚类有效性指标(Clustering Validation Indices)。
一般地,用于评估聚类的各方面的评估度量指标可分成以下两类[5]。
1)外部指标(External index):指聚类分析的评价函数是针对基准问题的,其簇的个数及每个数据对象的正确分类均为已知。
代表性外部指标有熵、纯度、F-measure等。
2)内部指标(Internal index):指数据集结构未知的情况下,聚类结果的评价只依靠数据集自身的特征和量值。
在这种情况下,聚类分析的度量追求两个目标:类内紧密度和类间分离度。
常见聚类方法

常见聚类方法聚类是一种无监督机器学习方法,将数据集中的样本分成若干个子集,使得每个子集内部的样本相似度尽可能高,而不同子集间的相似度尽可能低。
在现实生活中,聚类应用广泛,比如将市场上的消费者分成不同的群体,或将某个领域的文献分类。
本文将介绍常见的聚类方法。
1. K-means聚类K-means是一种基于距离的聚类方法,它将数据集分成K个簇,每个簇的中心被称为质心。
算法的核心是不断地迭代更新质心,直到质心不再发生变化或达到最大迭代次数。
K-means聚类的缺点是对初始质心的选择敏感,可能会陷入局部最优解。
2. 层次聚类层次聚类是一种基于距离的聚类方法,将数据集中的样本逐层合并成越来越大的簇。
具体来说,它分为自上而下和自下而上两种方法。
自上而下的方法从整个数据集开始,每次将最相似的两个样本合并成一个簇,直到只剩下一个簇。
自下而上的方法从每个样本开始,逐步将相似度高的样本合并成簇,直到只剩下一个簇。
层次聚类的优点是不需要预设簇的数量,缺点是计算复杂度高,难以处理大规模数据集。
3. 密度聚类密度聚类是一种基于密度的聚类方法,将样本分为若干个密度相似的区域。
具体来说,它以每个样本为中心,计算在一定距离范围内的样本个数,若该数目超过预设阈值,则将它们归为同一簇。
密度聚类的优点是能够处理任意形状的簇,缺点是对参数的设定比较敏感,容易陷入噪声区域。
4. 谱聚类谱聚类是一种基于图论的聚类方法,将样本看作图中的节点,节点之间的相似度看作边的权重,然后通过图的拉普拉斯矩阵进行谱分解得到特征向量,最后将特征向量作为新的样本空间进行聚类。
谱聚类的优点是能够处理非凸的簇,缺点是计算复杂度较高。
不同的聚类方法有各自的优缺点,需要根据具体的应用场景来选择合适的方法。
matlab基于密度的聚类算法

密度聚类(Density-Based Clustering)是一种基于密度的聚类算法,其主要思想是将样本空间划分为密度相连的区域,并将密度较大的区域划分为一个簇。
相比于传统的基于距离的聚类算法,密度聚类对簇形状和大小的假设更为宽松,能够更好地适应各种形状和密度不均匀的簇。
MATLAB作为一种强大的科学计算工具,提供了丰富的聚类算法实现,包括基于密度的聚类算法。
本文将针对MATLAB中基于密度的聚类算法的实现与使用进行介绍,分为以下几个方面:1.密度聚类算法的原理密度聚类算法的核心是基于样本点的密度来划分簇。
需要定义一个邻域的大小(ϵ)和邻域中最小样本点的个数(MinPts),然后通过计算每个样本点的密度来找到核心对象(密度大于MinPts)及其直接密度可达的样本点,最终将这些样本点划分为一个簇。
对于密度相连的簇,会被合并为一个整体。
2.MATLAB中基于密度的聚类算法实现MATLAB中提供了基于密度的聚类算法的实现,主要包括DBSCAN (Density-Based Spatial Clustering of Applications with Noise)和OPTICS(Ordering Points To Identify the Clustering Structure)两种算法。
其中,DBSCAN是一种基于密度的聚类算法,并且对样本点的簇结构进行了良好的定义。
OPTICS算法是对DBSCAN的扩展,通过计算样本点的可达距离将簇进行了有序排列,并能够有效地处理各向异性的数据。
3.基于密度的聚类算法在MATLAB中的使用在MATLAB中,可以借助Statistics and Machine Learning Toolbox提供的函数来实现基于密度的聚类算法。
通过使用fitcknn函数可以构建基于密度的K近邻分类器,利用knnsearch函数可以对新样本进行分类预测。
4.基于密度的聚类算法的优缺点相比于传统的基于距离的聚类算法,基于密度的聚类算法能够更好地适应各种形状和密度不均匀的簇。
基于密度的聚类和基于网格的两大聚类算法

DENCLUE:基于密度分布函数的聚类
2
DBSCAN
基于密度的簇是密度相连的点的集合 主要思想
寻找被低密度区域分离的高密度区域 只要临近区域的密度(单位大小上对象或数据点的数
目)超过某个阈值,就继续聚类
13
OPTICS:通过点排序识别聚类结构
数据集的排序可以用图形描述,有助于可视化和理解数据集 中聚类结构,例如下图是一个简单的二维数据集的可达图。 其中三个高斯“凸起”反映数据集中比较稠密的部分。
14
OPTICS:通过点排序识别聚类结构
Step 1:有序种子队列初始为空.结果队列初始为空 ; Step 2:如果所有点处理完毕.算法结束;否则选择一个未处理对象( 即不在结果队列中)放人有序种子队列: Step 3:如果有序种子队列为空,返回Step 2,否则选择种子队列中的 第一个对象P进行扩张: Step 3.1:如果P不是核心节点.转Step 4;否则,对P 的E邻域内任一 未扩张的邻居q 进行如下处理 Step 3.1.1:如果q已在有序种子队列中且从P到 q的可达距离小于旧值 ,则更新q的可达距离,并调整q到相应位置以保证队列的有序性; Step 3.1.2:如果q不在有序种f队列中,则根据P 到q的可达距离将其插 入有序队列; Step 4:从有序种子队列中删除P.并将P写入结果队列中,返回Step 3
Step4 否则(即p为核心对象),给 Neps(p)中的所有对象打上一个新的类标签 newid,然后将这些对象压入堆栈的Seeds中; Step5 让CurrentObject = Seeds.top;然后检索属于Neps(CurrentObject) 的 所有对象;如果| Neps(CurrentObject) |>MinPts,则剔除已经打上标记的 对象,将余下的未分类对象打上类标签newid,然后压入堆栈; Step6 Seeds.pop,判断Seeds是否为空,是,则执行Step1 ,否则执行Step5。
常用聚类算法(基于密度的聚类算法

常⽤聚类算法(基于密度的聚类算法前⾔:基于密度聚类的经典算法 DBSCAN(Density-Based Spatial Clustering of Application with Noise,具有噪声的基于密度的空间聚类应⽤)是⼀种基于⾼密度连接区域的密度聚类算法。
DBSCAN的基本算法流程如下:从任意对象P 开始根据阈值和参数通过⼴度优先搜索提取从P 密度可达的所有对象,得到⼀个聚类。
若P 是核⼼对象,则可以⼀次标记相应对象为当前类并以此为基础进⾏扩展。
得到⼀个完整的聚类后,再选择⼀个新的对象重复上述过程。
若P是边界对象,则将其标记为噪声并舍弃缺陷:如聚类的结果与参数关系较⼤,导致阈值过⼤容易将同⼀聚类分割,或阈值过⼩容易将不同聚类合并固定的阈值参数对于稀疏程度不同的数据不具适应性,导致密度⼩的区域同⼀聚类易被分割,或密度⼤的区域不同聚类易被合并DBSCAN(Density-Based Spatial Clustering of Applications with Noise)⼀个⽐较有代表性的基于密度的聚类算法。
与层次聚类⽅法不同,它将簇定义为密度相连的点的最⼤集合,能够把具有⾜够⾼密度的区域划分为簇,并可在有“噪声”的空间数据库中发现任意形状的聚类。
基于密度的聚类⽅法是以数据集在空间分布上的稠密度为依据进⾏聚类,⽆需预先设定簇的数量,因此特别适合对于未知内容的数据集进⾏聚类。
⽽代表性算法有:DBSCAN,OPTICS。
以DBSCAN算法举例,DBSCAN⽬的是找到密度相连对象的最⼤集合。
1.DBSCAN算法⾸先名词解释:ε(Eps)邻域:以给定对象为圆⼼,半径为ε的邻域为该对象的ε邻域核⼼对象:若ε邻域⾄少包含MinPts个对象,则称该对象为核⼼对象直接密度可达:如果p在q的ε邻域内,⽽q是⼀个核⼼对象,则说对象p从对象q出发是直接密度可达的密度可达:如果存在⼀个对象链p1 , p2 , … , pn , p1=q, pn=p, 对于pi ∈D(1<= i <=n), pi+1 是从 pi 关于ε和MinPts直接密度可达的,则对象p 是从对象q关于ε和MinPts密度可达的密度相连:对象p和q都是从o关于ε和MinPts密度可达的,那么对象p和q是关于ε和MinPts密度相连的噪声: ⼀个基于密度的簇是基于密度可达性的最⼤的密度相连对象的集合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传统的密度定义:基于中心的方法
➢ 传统基于中心的密度定义为: 数据集中特定点的密度通过该点ε半径之内的点计数(包括本身)来估计。 显然,密度依赖于半径。
13
基于密度方法的聚类- DBSCAN 所用到的基本术语
定义 对象的ε-邻域:给定对象在半径ε内的区域。 定义 核心对象:如果一个对象的ε-邻域至少包含最小数目MinPts个
对象,则称该对象为核心对象。 例 下图中,ε=1cm,MinPts=5,q是一个核心对象。
定义 直接密度可达:给定一个对象集合D,如果p是在q的ε-邻域内,而 q是一个核心对象,我们说对象p从对象q出发是直接密度可达的。 例 在下图中,ε=1cm,MinPts=5 ,q是一个核心对象,对象 p1从对象q出发是直接密度可达的。
件不满足则回到步骤2。
6
k-means优缺点
➢ 主要优点: 是解决聚类问题的一种经典算法,简单、快速。 对处理大数据集,该算法是相对可伸缩和高效率的。 当结果簇是密集的,它的效果较好。
➢ 主要缺点 在簇的平均值被定义的情况下才能使用。 必须事先给出k(要生成的簇的数目),而且对初值敏感,对于不 同的初始值,可能会导致不同结果。 不适合于发现非凸面形状的簇或者大小差别很大的簇。而且,它 对于“躁声”和孤立点数据是敏感的。
聚类分析
宋宜飞
1
➢ 回顾
➢ 密度聚类方法
DBSCAN算法 OPTICS 算法
➢ 网格聚类方法
CLIQUE算法
主要内容
2
回顾
➢ 聚类
聚类(clustering)也称为聚类分析,指将样本分到不同的组中使得同一组中 的样本差异尽可能的小,而不同组中的样本差异尽可能的大。 聚类得到的不同的组称为簇(cluster)。 一个好的聚类方法将产生以下的聚类 最大化类中的相似性 最小化类间的相似性
7
层次聚类方法
➢ 层次聚类方法对给定的数据集进行层次的分解,直到某种条件满足为 止。具体又可分为: 凝聚的层次聚类:一种自底向上的策略,首先将每个对象作为一个簇, 然后合并这些原子簇为越来越大的簇,直到某个终结条件被满足。 分裂的层次聚类:采用自顶向下的策略,它首先将所有对象置于一个 簇中,然后逐渐细分为越来越小的簇,直到达到了某个终结条件。
密度可达
15
基于密度方法的聚类- DBSCAN 所用到的基本术语
定义 密度相连的: 如果对象集合D中存在一个对象o,使得对象p 和q是从o关于ε和MinPts密度可达的,那么对象p和q是关于 ε和MinPts密度相连的。
图 密度相连
定义 噪声: 一个基于密度的簇是基于密度可达性的最大的密度相 连对象的集合。不包含在任何簇中的对象被认为是“噪声”。
➢ k-means 算法基本步骤
1. 从 n个数据对象任意选择 k 个对象作为初始聚类中心; 2. 根据每个聚类对象的均值(中心对象),计算每个对象与这些中心对象的距离;
并根据最小距离重新对相应对象进行划分; 3. 重新计算每个(有变化)聚类的均值(中心对象); 4. 计算标准测度函பைடு நூலகம்,当满足一定条件,如函数收敛时,则算法终止;如果条
14
基于密度方法的聚类- DBSCAN 所用到的基本术语
定义 密度可达的:如果存在一个对象链p1,p2,…,pn,p1=q, pn=p,对pi∈D,(1<=i<=n),pi+1是从pi关于ε和MitPts直接密度 可达的,则对象p是从对象q关于ε和MinPts密度可达的。
例 在下图中,ε=1cm,MinPts=5,q是一个核心对象,p1是 从q关于ε和MitPts直接密度可达,p是从p1关于ε和MitPts直接密度 可达,则对象p从对象q关于ε和MinPts密度可达的
9
密度聚类方法
➢ 划分聚类方法 ➢ 层次聚类方法 ➢ 密度聚类方法 :基于密度的聚类方法以数据集在空间分布上的稠
密程度为依据进行聚类,无需预先设定簇的数量,因此特别适合对 于未知内容的数据集进行聚类。 ➢ 网格聚类方法 ➢ 模型聚类方法
10
基于密度方法的聚类
➢ 密度聚类方法的指导思想是,只要一个区域中的点的密度 大于某个域值,就把它加到与之相近的聚类中去。对于簇 中每个对象,在给定的半径ε的邻域中至少要包含最小数 数目(MinPts)个对象。
➢ 这类算法能克服基于距离的算法只能发现“类圆形”的聚 类的缺点,可发现任意形状的聚类,且对噪声数据不敏感。
➢ 代表算法有:DBSCAN、OPTICS、DENCLUE算法等。
11
基于密度方法的聚类- DBSCAN
➢ DBSCAN(Density-Based Spatial Clustering of Applications with Noise)一 个比较有代表性的基于密度的聚类算法。与层次聚类方法不同,它将 簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划 分为簇,并可在有“噪声”的空间数据库中发现任意形状的聚类。
3
聚类的分类:
➢ 划分聚类方法 ➢ 层次聚类方法 ➢ 密度聚类方法 ➢ 网格聚类方法 ➢ 模型聚类方法
回顾
4
划分聚类方法
在基于划分的聚类中,任务就是将数据划分成 K个不相交的点集,使每个子集中的点尽可能 同质。 基于划分的方法 ,其代表算法有 k-means算法、 K-medoids等
5
k-means 算法
边界点:边界点不是核心点,但落在某个核心点的邻域内。 噪声就是那些既不是边界点也不是核心点的对象
图 噪声
16
DBSCAN算法概念示例 ➢ 如图所示, ε 用一个相应的半径表示,设MinPts=3,请分
析Q,M,P,S,O,R这5个样本点之间的关系。
“直接密度可达”和“密度可达”概念示意描述
解答:根据以上概念知道:由于有标记的各点M、P、O和R的 ε 近邻均包含 3个以上的点,因此它们都是核对象;M是从P“直接密度可达”;而Q则是 从M“直接密度可达”;基于上述结果,Q是从P“密度可达”;但P从Q无 法“密度可达”(非对称)。类似地,S和R从O是“密度可达”的;O、R和S 均是“密度相连”的。
➢ 层次凝聚的代表是AGNES算法。层次分裂的代表是DIANA算法。
8
层次聚类优缺点
➢ 层次聚类方法是不可逆的,也就是说,当通过凝聚式的方 法将两组合并后,无法通过分裂式的办法再将其分离到之 前的状态,反之亦然。
➢ 另外,层次聚类过程中调查者必须决定聚类在什么时候停 止,以得到某个数量的分类。
➢ 在不必要的情况下应该小心使用层次聚类方法。