一种提高GNSS测速精度的自适应Kalman滤波算法
Kalman滤波应用于GPS相对导航信息解算方法

Kalman滤波应用于GPS相对导航信息解算方法随着全球卫星导航系统的不断完善和发展,以GPS为代表的全球卫星定位系统已经成为了现代导航和定位的主要手段。
然而,在定位过程中,GPS系统会受到各种误差的影响,从而导致定位精度的降低。
而Kalman滤波作为一种优秀的滤波算法,可以对GPS数据进行有效的滤波处理,提高GPS相对导航信息的解算精度。
首先,在GPS测量中,误差有很多来源,如卫星误差、接收机误差、当地大气层误差等等。
这些误差会导致GPS解算出的位置和速度信息不准确,甚至无法获取。
因此,在GPS解算中应用Kalman滤波算法可以减少这些误差的影响。
Kalman滤波是一种离线递归滤波算法,它可以通过使用系统状态方程组和测量方程组来进行系统状态的估计。
其基本思想是将先验知识和测量数据相结合,通过递归计算得到一个状态序列,从而达到有效滤波的目的。
在GPS相对导航信息解算中,Kalman滤波算法的具体实现步骤如下:首先,通过GPS测量得到当前时刻的位置和速度信息;其次,通过Kalman滤波算法来处理测量数据并估计系统状态。
具体而言,由于GPS测量数据误差很大,因此需要对测量数据进行处理,提取出有效信息。
同时,需要将系统状态分为两个部分:预测阶段和更新阶段。
在预测阶段,根据系统状态方程组对当前状态进行预测。
在更新阶段,根据测量方程组对当前状态进行更新。
通过逐步迭代,可以得到一个状态序列,从而达到有效滤波的目的;最后,根据处理后的数据得到高精度的GPS相对导航信息。
综上所述,Kalman滤波算法可以有效地处理GPS数据中的噪声、误差等因素,提高GPS相对导航信息的解算精度。
在实际的应用中,Kalman滤波算法被广泛应用于航空、地球探测、机器人控制等领域,为工程应用提供了有力的支持。
为了进行数据分析,我们需要先确定相关数据。
在GPS相对导航信息解算中,可能需要考虑的数据包括但不限于以下几个方面:1. GPS测量数据:包括接收机接收到的卫星信号以及信号传输时间。
自适应Kalman滤波算法在加速度计自标定中的应用

电子设计工程Electronic Design Engineering第19卷Vol.19第6期No.62011年3月Mar.2011自适应Kalman 滤波算法在加速度计自标定中的应用叶军,陈坚,石国祥(第二炮兵工程学院陕西西安710025)摘要:针对自标定加速度计组合动基座试验数据中存在的数据异常问题,推导并运用自适应Kalman 滤波算法剔除异常数据,通过对不同Kalman 滤波算法自标定精度解算结果的均值和标准差进行比较,表明自适应Kalman 滤波算法更加有效。
关键词:自适应Kalman 滤波算法;动基座;加速度计自标定中图分类号:TP27文献标识码:A文章编号:1674-6236(2011)06-0053-04Application of adaptive Kalman filtering algorithm in autonomous calibration accelerometerYE Jun ,CHEN Jian ,SHI Guo -xiang(The Second Artillery Engineering College ,Xi ’an 710025,China )Abstract:Aiming at the problems of abnormal data in the test data of autonomous calibration accelerometer -unit on dynamicbase ,deducing and using adaptive Kalman filtering algorithm eliminates abnormal data ,according the comparison of results from calibration precision by different Kalman filtering algorithm ,it shows that the adaptive Kalman filtering algorithm is more effective.Key words:adaptive Kalman filtering algorithm ;dynamic base ;autonomous calibration accelerometer收稿日期:2010-12-03稿件编号:201012009作者简介:叶军(1985—),男,浙江兰溪人,硕士研究生。
Kalman滤波估计GPS载波相位变率的测速方法与实现

Kalman滤波估计GPS载波相位变率的测速方法与实现田良辉;刘根友;郭爱智【期刊名称】《大地测量与地球动力学》【年(卷),期】2011(31)1【摘要】利用差分测速和Kalman滤波估计相位变率方法对某次航空重力测量的飞行数据进行了解算,通过与GT-1A自带的GPS高精度定位测速软件和WAY-Point软件比对分析,结果表明:采用Kalman滤波估计相位变率的GPS差分测速,能够适应较复杂的运动模式,定速精度达到mm/s级,高于WAY-Point软件的动态测速精度.%The accuracy of moving carrier' s velocity, which was determined by GPS, depends on mainly accuracy of carrier phase-rate. It is difficult to guarantee accuracy of velocity with raw Doppler and differential phase.Carrier phase-rate estimated from Kalman filter was adopted to determine the velocity instead of Doppler. The model and theory of differential velocity measurement and carrier phase-rate estimated by Kalman filter were introduced.The flight data of a certain airborne gravimetry were calculated with Kalman filter method, and the results were compared with those from GT-1A and WAY-Point. It is indicated that GPS carrier phase-rate estimated from Kalman filter can be adapted to some high-velocity and more complicated movements, its accuracy of velocity measurement can achieve at mm/s level, the result approaches to that by GT-I A and is higher than that with WAY-Point.【总页数】6页(P72-77)【作者】田良辉;刘根友;郭爱智【作者单位】中国科学院测量与地球物理研究所动力大地测量学重点实验室,武汉,430077;中国科学院研究生院,北京,100049;中国科学院测量与地球物理研究所动力大地测量学重点实验室,武汉,430077;中国科学院测量与地球物理研究所动力大地测量学重点实验室,武汉,430077;中国科学院研究生院,北京,100049【正文语种】中文【中图分类】P228【相关文献】1.GPS载波相位双差观测量随机模型估计的新方法 [J], 郭秋英;蔡菲2.基于Kalman滤波的GPS载波相位信息融合技术 [J], 卓宗奎;张开东;吴美平3.基于载波相位变率的GPS单站测速方法 [J], 田良辉;陈附图4.历元间载波相位差分的GPS/BDS精密单点测速算法 [J], 尹潇;柴洪洲;向明志;苏明晓5.适应高动态环境的GPS载波相位估计方法研究 [J], 李小民;田庆民因版权原因,仅展示原文概要,查看原文内容请购买。
基于置信度的自适应Kalman滤波定位方法

t s e ec p i n l n omai n o b o a u t ain . s l a a t e f d r td Kama l r g meh d o mi d p re t a f r t ra n r l cu t s A ef d p i e e ae l n f t i t o s o i o m l f o - v i en
实 际定 位 的 需要
关 键 词 :组 合 定位 ;置信 度 函数 ;自适 应 滤 波 ;D— S证 据 理 论
中图 分 类 号 : P 4 . T 22 6
文 献 标识 码 : A
文 章 编 号 :1 7 — 5 0 2 1 ) 2 0 4 — 5 6 4 5 9 (0 0 0 — 0 2 0
第2 8卷 第 2期 21 0 0年 4月
中 国 民 航 大 学 学 报
J OURNAL VI 0F CI L AVI I AT ON UNr ERS T oF CHI V I Y NA
Vo _8 No 2 l . 2 Ap i 2 0 rl 01
基 于置信 度 的 自适应 Kama l n滤 波 定位 方 法
(1R btntu ,AU ,T ni 0 3 0 C ia . oo Isi t C C i jn 3 00 , hn ; te a
i
2 Dp 2 C ia . e at n uo ai ,ot at a i n esy J i m o o h n v t l 12 2 , hn )
Ab t a t h r be o o i o i g f i r re c s ie d v ai n o u d o uo o u b l o o f n a p a d e s r c :T e p o l m fp st n n l eo x e s e it f t o ra tn mo smo i rb t t p e  ̄ u i au v o o e oe
基于自适应强跟踪Kalman滤波的GNSS跟踪环路设计

基于自适应强跟踪Kalman滤波的GNSS跟踪环路设计盛开宇;陈熙源;汤新华;闫晣;高宁
【期刊名称】《传感技术学报》
【年(卷),期】2024(37)1
【摘要】为提高GNSS接收机跟踪环路在复杂环境下的跟踪性能,提出一种基于自适应强跟踪Kalman滤波(ASTKF)的跟踪环路,在传统跟踪环路的基础上,以鉴相器输出为观测量进行自适应强跟踪Kalman滤波,滤波结果用于计算导航滤波器的观测量,同时将伪码频率和载波多普勒频率反馈到码NCO和载波NCO,在ASTKF中使用基于卡方分布的渐消因子计算方法,提升跟踪环路鲁棒性。
半物理仿真实验表明,相比于基于Kalman滤波的跟踪环路和基于强跟踪Kalman滤波(STKF)的跟踪环路,所提出方法在水平方向上的位置误差和速度误差减小20%以上,有效提高了卫星导航接收机的定位性能。
【总页数】7页(P35-41)
【作者】盛开宇;陈熙源;汤新华;闫晣;高宁
【作者单位】东南大学仪器科学与工程学院;微惯性仪表与先进导航技术教育部重点实验室
【正文语种】中文
【中图分类】U666
【相关文献】
1.基于Kalman滤波的载波跟踪环路设计
2.基于Kalman滤波的GPS跟踪环路晶振闪烁噪声建模方法
3.基于强跟踪Kalman滤波的鲁棒人脸跟踪算法
4.基于强跟踪平方根容积卡尔曼滤波的GNSS信号跟踪环路设计
5.GNSS多系统PPP中强跟踪自适应Kalman滤波的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
gnss 和 uwb 信号的融合算法 卡尔曼滤波 -回复

gnss 和uwb 信号的融合算法卡尔曼滤波-回复什么是GNSS和UWB信号的融合算法卡尔曼滤波?GNSS(全球导航卫星系统)和UWB(超宽带)信号融合算法卡尔曼滤波是一种将两种信号融合在一起,以提高精确度和可靠性的算法。
GNSS是一种利用卫星定位系统的导航技术,而UWB是一种通过发送超短脉冲信号来进行距离测量的无线技术。
这两种信号各自具有一些优势和限制,通过将它们融合在一起,可以克服各自的缺点,并提供更准确可靠的定位和导航解决方案。
文章主要分为以下几个部分:第一部分:介绍GNSS和UWB信号的原理和应用领域。
首先,我们将详细介绍GNSS和UWB信号的原理和工作方式。
GNSS由一组卫星组成,通过接收卫星发射的信号,并计算信号的传播时间来确定定位。
UWB则是通过发送超短脉冲信号,并测量信号的传播时间来进行距离测量。
我们还将介绍它们在各种应用领域的应用,如航空航天、汽车导航、无人机、室内定位等。
第二部分:分析GNSS和UWB信号融合的优势和挑战。
在这一部分,我们将讨论将GNSS和UWB信号融合在一起的原因和优势。
GNSS信号在室内或密集城市环境下有时受到阻塞或多径效应的干扰,导致定位精度下降。
而UWB信号可以提供更准确的距离测量,但其定位精度受到信号传输过程中的噪声和多径效应的影响。
通过将两种信号的优势结合起来,可以提供更精确可靠的定位解决方案。
然而,将两种信号融合在一起也面临一些挑战,如如何选择合适的融合算法、如何校准传感器等。
第三部分:介绍卡尔曼滤波算法的原理和应用。
卡尔曼滤波是一种常用的融合算法,广泛应用于导航和定位领域。
在这一部分,我们将详细介绍卡尔曼滤波的原理和应用。
卡尔曼滤波通过递归地估计系统的状态,并将测量结果和状态估计值进行融合,得到一个更准确和可靠的状态估计。
我们将解释卡尔曼滤波的数学原理和算法,包括状态预测、测量更新等步骤。
第四部分:将卡尔曼滤波应用于GNSS和UWB信号融合。
在这一部分,我们将具体介绍如何将卡尔曼滤波算法应用于GNSS和UWB信号融合。
自适应渐消Kalman滤波算法在RTK中的应用研究
自适应渐消Kalman滤波算法在RTK中的应用研究高亚豪;左启耀;邹志勤;李峰【期刊名称】《导航定位与授时》【年(卷),期】2018(005)004【摘要】在动态载波相位差分定位(RTK)中,由于观测环境复杂,会经常发生周跳、卫星信号失锁等情况,严重影响基线解算的连续性和可靠性.针对动态应用环境,提出了一种Kalman滤波算法在RTK技术中的应用方法.该方法可以实时估计模糊度浮点解及其协方差矩阵,在需要重新固定模糊度时可直接用于搜索,起到了周跳修复的作用.此外,采用了自适应渐消Kalman滤波算法提高算法的动态适应性,并引入独立的滑动窗进行新息的收集和处理,解决了由于参考星变化或卫星信号失锁造成观测量中断而无法准确计算新息协方差的难题.仿真结果表明,该算法能够在模糊度发生变化时快速收敛,并且相对于一般Kalman滤波算法在高动态下提高了模糊度浮点解的精度,提高了后续模糊度搜索的效率和固定成功率.【总页数】7页(P62-68)【作者】高亚豪;左启耀;邹志勤;李峰【作者单位】北京自动化控制设备研究所,北京100074;北京自动化控制设备研究所,北京100074;北京自动化控制设备研究所,北京100074;北京自动化控制设备研究所,北京100074【正文语种】中文【中图分类】TN967.1【相关文献】1.高铁变形分析中自适应Kalman滤波算法应用研究 [J], 袁明月;文鸿雁;聂光裕;高红2.基于渐消记忆自适应Kalman滤波的GPS/DR数据融合 [J], 游胜玉;姜林;李祥3.一种渐消自适应滤波算法在陀螺监控中的应用 [J], 吕佩举;李稳朝;陈长宝4.自适应渐消扩展Kalman粒子滤波方法在组合导航中的应用 [J], 宫轶松;归庆明;李保利;王军江5.基于指数渐消遗忘因子的组合导航自适应滤波算法 [J], 曾庆化;赵天钰;赵宾;刘建业;朱小灵因版权原因,仅展示原文概要,查看原文内容请购买。
自适应Kalman滤波在光纤陀螺SINS/GNSS紧组合导航中的应用

波方 法。采 用改进 的 自适应 卡 尔曼滤 波方 法滤波得 到 导航 参 数 的最优估 计 ,然后对 系统 进行 反馈 补 偿校正, 抑 制 了滤波发 散 问题 , 提 高 了系统的稳 定性 。稳 态测试试 验 结果表 明 : 设 计的 光纤 陀螺 S I N S / G NS S紧组合 导航 系统 具有 较好 的鲁 棒性 ; 在 三颗 卫 星的 条件 下 , 系统 能够 在短 期 内保持 较 高的 导航
王 巍, 向 政, 王 国栋
( 中国航 天 电子技 术研 究 院, 北京 1 0 0 0 9 4 ) 摘 要 :为 了提 高光 纤陀螺捷 联惯 性导航 系统( S I NS ) 和全球 卫 星 导航 系统( G N S S ) 的组合 导航 精度 和
系统稳 定性 , 设 计 了基 于伪 距 、 伪距 率的 紧组合 导航 系统 模 型。针 对 光纤 陀螺 的 白噪 声特 点 , 以及 误
第4 2卷 第 3期
V0 1 . 4 2 NO. 3
红 外 与 激 光 工 程
I n ra f r e d a n d La s e r En g i n e e r i n g
2 0 1 3年 3 月
Ma r . 2 0 1 3
自适应 K a l ma n滤 波在 光 纤 陀螺 S I N S / GN S S紧 组合 导 航 中的应 用
精度 , 验 证 紧组 合 导 航 的 优 越 性 。
关键 词 :光 纤 陀螺 ; 紧组合 导航 ; 伪 距/ 伪距率; 自适应 卡 尔曼滤 波 ; 反 馈补 偿
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
・34・
金玲等,一种提高GNSS测速精度的自适应Kaiman滤波算法
第32卷第6期
当目标正在以某一加速度机动时,下一时刻的加速度取值是有限的,只能在“当前”加速度的邻域内, 为此,周宏仁等提出了机动目标加速度“当前”统计模型"],其本质是机动加速度非零均值时间相关模型, 其机动加速度的“当前”概率密度用修正的瑞利分布描述,均值为“当前”加速度的预测值。该模型具有较 好的动态性能[8】,常应用于机动目标的跟踪中。 在“当前”统计模型概念条件下,当用户正在以某一加速度机动时,采用非零均值的马尔可夫加速度
态下的测速精度。
1自适应Kalman滤波算法
Kalman滤波是基于状态模型空间的方法,它由状态模型和观测模型组成。GNSS导航定位中的状态 方程是用户的动力学方程和接收机的钟差模型的结合,鉴于篇幅考虑,本文不对接收机钟差模型进行讨 论,详见文献[6]。单点测速的观测模型为伪距或伪距率方程。由于载体运动模式的多样性和机动的随
q12 q13
2 2
933J
q2l=1/2a4[1+e一勉7—2e一47+2aTe一“7—2aT+a2严] q3l-1/2a3[1一e粕7—2aTel’] q32=l/2a2[e也7—2e17+1]
q22=l/2a3[4e一47一e一2口7—3+2aT]
q23
2
g。,=互Ia[1一e也7]
万方数据
2011年11月
第32卷第6期
(14) Hp=[0勺0 0钍0 0%0 0 1]。11(,=1,2,…m) 多普勒精度与载体的加速度和加加速度具有很强的相关性,瞬时多普勒的精度受载体的动态应力影 响很大。载体低动态状态下的多普勒测速精度可达到每秒厘米级,载体高机动时多普勒的误差迅速增
大,从而导致测速精度大幅度降低。因此本文通过设置动态判决门限,高、中动态时只进行受动态应力影 响小的伪距更新,低动态下再添加精度较高的伪距率更新,从而全面提高载体在各种状态下的测速精度。 归纳公式000模拟器产生的动态信号,通过 GPS接收机接收信号进行动态定位,对本文提出的算法进 行验证。该模拟产生的轨迹的运动特性比较具有代表性, 载体轨迹示于图1,大致包括起飞、巡航和降落三个阶段, 也可近似分为高、中、低机动等运动状态,图2为载体加速 度曲线,最大加速度为259,图3为载体加加速度曲线,最 大加加速度达629/s。飞行时间为600s,采样频率为
茹(t)=口(t)+Ⅱ(£)
(1)
其中,互(t)为载体茄轴方向加速度,口(t)为零均值有色加速度噪声,a(t)为加速度均值,在每一个采样周
[蓁{i;]=[三壹i]・[雾{l;]+[兰]五ct,+[;]。彬ct,
r
1 0 T 1 o
c2,
1/a2[一1+ar+e一“7]]
1/a[1一e17]
e—ar
吼¨=l
引
言 目前卫星导航系统已逐渐成为定位与测速的最主要的手段之一,广泛应用于星载、舰载、弹载、机载、
车载以及武器试验等领域的速度测量。GNSS测速共有三种方法…。①位置差分测速,它基于高精度定 位结果,通过位置差分来获取速度;②原始多普勒测速,它基于原始多普勒观测值,采用最小二乘法直接 计算速度;③载波相位差分求解速度,它通过载波相位差分所获得的多普勒观测值来计算速度。其中,位 置差分法和载波相位差分计算的是平均速度,一般用于数据后处理中,有一定的延迟。而原始多普勒测
遥测遥控
・35・
矿:为石方向加速度分量的方差。在“当前”统计模型中,隐含着一个重要的假设,用当前加速度的估计
值茹肌一。替代下一时刻加速度的均值,并假设机动加速度服从修正的瑞利分布,从而得到加速度的均值和
方差为
三‘=茹Ⅵ一。
(6)
J。
Yrk/k 一 1
{
f盯:=等}[口一一一。]2二一>0X'k/k 2—=一【口一一
I盯x
¨
.
一I
>
0
(7)
石k僵一l< 0
【矿,=—■:_L k2=等}[一一+宝¨。]2‰一。<0a 一眦z+石∥^一l J
从式(6)、式(7)可以看出,“当前”统计模型用户噪声方差阵是关于口一和口一一的二次函数,所以滤 波器的性能受加速度的最值影响很大。当a一和口一一的绝对值取较小时,定位精度较高,但滤波器的带宽 较窄,能适应的载体机动变化范围较窄,且响应速度较慢。当Ⅱ一和口一一的绝对值取较大值时,相当于拓 宽了滤波器的带宽,定位系统能以较大的系统方差快速跟踪上用户较大范围的机动,然而此时载体低机 动状态下定位精度较差。因此,本文引入“滑动窗”方式来实时自适应地调整参数加速度最值口一和口一一。 它也基于“当前”统计模型的假设,即下一时刻的加速度只能在当前的加速度的邻域内变化,通过设置窗 口宽度Ⅳ,把最新,v时刻的加速度值引入计算模型,并剔除最旧数据,然后重新估计模型参数,假设当前时
^¨l…j:l
一{一、制蹬雠嘲
r”’rlf
r||
f f
r’’”
时间/s
酱——苟矿—1拓~ —1茄——茹矿—面
时间/s
图4方案一速度误差
2
图5方案二速度误差
1.5
,、1
1
一鼍一、捌唯埘精
n,
囊。
鬟舢
一l
时间/s
-1{
100
200
300
400
500
600
时间A
图6方案三速度误差 表1
方案一 方案二 方案三 方案四
对动态模型的自适应调整【4’5 J,本文提出的算法同时实现动态模型的自适应修正和观测模型的自适应更
新。该算法采用动态特性较好的“当前”统计模型作为状态模型,引入“滑动窗”方式来实时自适应地修 正模型参数,始终保持噪声模型接近于真实模型。此外,该算法还提出了观测模型的自适应更新,由于观 测量伪距和瞬时多普勒的精度受载体的运动状态影响不同,通过设置动态判决门限,高、中动态时仅进行 受动态应力影响小的伪距更新,低动态下再同时进行精度较高的伪距率更新,可全面提高载体在各种状
L-o
j
l
r1/a[一T+al吐/2+(1一e-aT)/a]] T一.(1一e17)几 U=I I
I-
l—e讲
J
『.1 Lo 其驱动噪声眠一。对应的方差阵Q。为
T严/2]
o l
j
Q。=E[眠.。巩一。]=2ao':l
卜qt2
q:l q22 口。2
q13]
q23
(5)
L-g,。
式中,qll=1/2a5[1一e一勉7+2aT+2/3a3r一2口2于一4aTe一47]
图7方案四速度误差
四种方案计算的z方向速度误差统计结果
中机动时速度误差(m/s)
1.004 0.193
高机动时速度误差(m/s)
2.160 0.149 0.140 0.143
低机动时速度误差(m/s)
0.015 0.096 0.043 O.02l
0.∞5
0.097
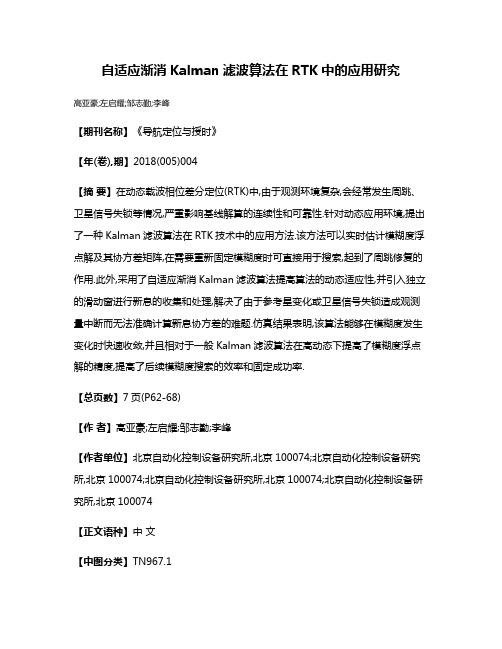
综合结果图和统计表,分析后可知 ①由图4可见,原始多普勒的精度与载体的机动有很强的相关性,中、高机动时多普勒精度急剧下 降,导致测速误差很大,产生突变,而低动态下测速精度很高; ②从图5、图6及表1可以看出,基于伪距更新的Kalman滤波算法克服了载体高动态下多普勒精度 差的不足,高动态测速精度显著提高。但由于常规“当前”统计模型的动态范围和估计精度相互矛盾,方 案二包含了较宽的动态范围,导致中、低动态下的测速误差仍然较大,特别是低动态下会有自激现象,产 生很大的野值; ③图6中引入“滑动窗”的“当前”统计模型的Kalmail滤波,较图5中常规的“当前”统计模型的Kal- man滤波,中、低机动下的测速精度提高了50%以上。原因在于“滑动窗”白适应地调整了模型参数,在动 态范围和估计精度之间取得了较好的平衡。然而与方案一相比,低动态下的测速精度仍有一定的差距, 其原因在于没有利用低动态下精度较高的多普勒信息; 万方数据
f l引>k。 且
Ii|>k:伪距更新 Iil<k:伪距、伪距率更新
…、
【l引<k。
50m/s2和5m/s3。
或
其中i、;分别代表载体的三轴加速度和加加速度,k。、k:取值伐表中、低机动的l临界线,本文分别设置为 由于伪距、伪距率更新涉及到矩阵求逆,当观测矢量的维数较大时计算量很大,因此采用序贯处理方 式,每个观测量顺序执行,前一颗卫星观测量作为后一颗卫星观测量的初始状态。低动态下伪距、伪距率 同时更新时,伪距更新的状态作为伪距率更新的初始状态。
在GNSS动态导航定位中,Kalman滤波的量测方程一般为伪距或伪距率方程。以GPS为例,建立观 测的伪距和伪距率方程,第歹颗卫星的伪距为
乃2
0+z“+%
(9)
o=√(名一戈∥+(Y—y『)2+(z一弓)2
其中,(茗,y,z)为用户在地心地固坐标系下当前的位置坐标,(戈f,乃,弓)为GPS卫星在地心地固坐标
10Hz. _n,氍恒
图1栽体轨迹图
抛
怫 瑚
船
。
.童毯悄最 蛳
|至 ㈨
蛳。
100
200梳400”“
图2裁体加速度图
时间店
图3载体加加速度图
针对上述运动场景,采用如下四种方案进行计算比较。 方案一基于原始多普勒利用最小二乘求解速度; 方案二基于伪距更新的常规“当前”统计模型的Kalman滤波算法求解速度; 方案三基于伪距更新引入“滑动窗”的当前统计模型的Kalman滤波算法求解速度,简称改进的“当
J
速度,(菇,夕,j)为用户在地心地固坐标系下的速度,Z。为用户时钟相对于GPS系统时的钟漂,%为GPS卫 星的伪距率测量误差,正。印为多普勒频率,A为载波波长。
式(9)、式(10)均可通过线性化,得到导航系统观测方程的一般形式一1
Y=Hx+£
(12)