MASTER-SLAVE MANIPULATORS AND REMOTEticie.
模糊PID控制器的鲁棒性研究外文文献翻译

模糊PID控制器的鲁棒性研究外文文献翻译案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
1EtherCAT

1EtherCATEtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaEtherCATSample with EtherCAT, Profibus and CAN over EtherCATContent ? ? ? ? ? ? ? ? General EtherCAT EtherCAT Master EtherCAT Coupler EtherCAT Terminal Profibus Master Terminal EL6731 CAN Master Terminal EL6751 TwinCAT PLC Troubleshooting 2 4 25 38 43 49 53 591EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaGeneral EtherCATEtherCAT Features ? no manual setup of node addresses ? no IP Address configuration ? no setup of Baud rates ? no restrictions in network topology ? no (practical) limitation of the maximum number of nodes (max. 65535 nodes/segment) Main Features: TwinCAT and EtherCAT ? offline configuration in TwinCAT System Manager: select EtherCAT master and add the EtherCAT slaves (Terminals) ? online configuration in TwinCAT System Manager: scan network and all EtherCAT slaves in the topology will be listed ? TwinCAT assigns logical slave addresses automatically ? add new slaves without changing the logical slave addresses ? compare configured EtherCAT network with real existing EtherCAT network ? separation from process data and bus diagnosis (helpful to make modular control architectures) ? mapping between physical and logical process data has to be configured (same as in all other field busses) Main Features TwinCAT V2.10 ? TwinCAT and EtherCAT: easy configuration and diagnosis ? for simple and complex control applications ? default settings for most applications sufficient ? manual configuration for optimal tuned complex applications ? Sync Units for combined and synchronized process data ? any process data can be logically combined in one sync unit Sync Unit ? four independent modules (a module defines a set of process data which is consistent and synchronized) ? combination of data from different slaves (validity of data is important) ? cyclic process data diagnosis for each sync unit ? if process data in one sync unit is invalid: separate reaction of control application can be defined ? for Multi-Task-Operation: each Task has own Sync-Unit/Frame (read/write process data in different task cycles) ? reduces bus load! ? Useful for applications with machine parts which can be out of order (planned or unplanned) and the rest of the machine should work. ?Sync Units help to structure these applications ? granularity depends on EtherCAT Slaves ? each EtherCAT Slave defines one or more process data areas which can be exchanged synchronous and consistent ? The number of independent process data areas depends on the implementation and resources of the EtherCAT Slave Controller (Sync Manager and FMMU channels)2EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaMaster SettingsMaster ConfigurationOnline: Scan Devices Select EtherCAT Device Offline: Insert EtherCAT Master Device Select and configure network adapter Slaves Configuration Startup Data CANopen over EtherCAT File over EtherCAT Firmware Update (Bootstrap)Slave SettingsSlave ConfigurationMaster DiagnosisFrameStates and FrameWcStates Device State Only in Config Mode available! Checks Network and looks for Slaves Scans the network slave by slave! Flat List of found Slave (no topology) Includes Link InformationOnly in Emergency Cases: Emergency ScanSlaveDiagnosis WcState: Variable of Type BOOL Shows Working Counter State from one EtherCAT Slave 0 (FALSE) = valid Working Counter 1 1 (TRUE) = invalid Working Counter An invalid Working Counter State means that one EtherCAT Command for updating the Inputs and Outputs has an incorrect WC. With this EtherCAT Command more than one Slave can be addressed (every Slave in this command has the same Working Counter 1). Check the Slave State to see which Slave is responsible for the Working Counter error.3EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaEtherCAT MasterAdapter Card4EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaFor use of Ethereal or Netmon, “Promiscuous Mode” must be enabled:5EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaEtherCAT - Advanced SettingsConfiguration of Master Info Data6EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaEtherCAT - TopologyEtherCATPortA, C, B CAN over EtherCAT Profibus over EtherCAT7EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline8EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaEtherCAT - ADS Interface to EtherCAT Master/SlaveCommunication Interface for EtherCAT Devices9EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaMaster InterfaceADS Port 65535 (0xFFFF) 0x1 - 0xFFFE (fixed address of a slave device) Meaning General Ads services handled by the master directly. This is an ADS service directed at an individual slave device. The port number is the same as the EtherCAT address of the slave device.Master Interface – ExampleIndex Group 0x00000003 0x00000006 Index Offset 0x00000100 0x00000000 Meaning Returns current state of master. Returns the number of projected slaves.Slave Interface – CANopen over EtherCATIndex Group 0x0000F302 Index Offset Index and Subindex of an SDO (coded see InfoSystem!) Example: 0x1c120001: index = 0x1c12, subindex = 1 Meaning SDO Upload/Download Request. The object is selected with the index offset.Slave Interface – Servo Drive over EtherCATIndex Group 0x0000F420 Index Offset IDN = LOWORD(0x0000yyyy) HIWORD for special attributes! (coded see InfoSystem!) Meaning Upload/Download IDN10EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - Additional Debug Information11EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - Additional Debug Information Slave State ESC BuildMaster StateFrame StatisticNumber of Cyclic FramesNumber of A-Cyclic FramesTransmit/Receive Errors in Miniport Driver12EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - Physical Address (Register 0010)13EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - Physical Address14EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - Physical AddressOnline - AmsNetId15EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaOnline - AmsNetId16EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaInfoData – CfgSlaveCount (Configured Slave Count)Actual Slave Count (read)Every “active" slave do count: “Passive" slaves and KLs don’t count:EK1100, EK1110, BK1120 EL 1xxx/2xxx/3xxx/4xxx/5xxx/6xxx EL 9xxx KL’s on the BK1120!17EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaInfoData - AMS Net ID of EtherCAT Master18EtherCAT Training130 Research Lane, Unit 11 Guelph, ON N1G 5G3 CanadaInputs - Frm0State (Frame 0 State)Frame NumberBitMeaning0 (0x0001) 1 (0x0002) 2 (0x0004) …..1. EtherCAT command not sent2. EtherCAT command not sent3. EtherCAT command not sent14 (0x4000) 15 (0x8000)15. EtherCAT command not sent complete frame not sent19。
单位招聘考试PTN专业(试卷编号161)

单位招聘考试PTN专业(试卷编号161)1.[单选题]R860设备最大支持本地会话的ID为()A)1200B)1800C)1000答案:B解析:2.[单选题]当前SPN网络中,ISIS协议一般使用()层次A)1) LEVEL1B)2) LEVEL2C)3) LEVEL 1/2答案:B解析:3.[单选题]SPE从NPE学到核心网路由后,不再向其他UPE和SPE发布,只向UPE发布一条()A)默认路由B)明细路由C)黑洞路由答案:A解析:4.[单选题]烽火CiTRANS R865设备共有()槽位,其中业务槽位()个A)32/24B)32/26C)30/24D)30/26答案:A解析:5.[单选题]U31服务器对应的SQL Server默认的用户名是A)RootB)ZTEC)adminD)sa答案:D解析::SNMPB)读团体名:fiber-RO读写团体名:fiber-RW安全名:fiberhome组名:onlye访问控制列表名称:SNMPC)用户组名:NMS用户名:fiberhome访问控制列表名:SNMPD)以上说法均不正确答案:C解析:7.[单选题]OAM测试,做的一条百兆业务,测试环回帧功能时,设置完成后,需要在源站的哪个盘上点右键进行“状态监视”A)上话业务的ESJ1盘B)XCUJ1盘C)XSJ1盘D)NMUJ1盘答案:B解析:8.[单选题]对于CES业务,当AC侧需要加载保护时,如果加载的是1+1保护,那么主备AC端口会受到2份完全一样的报文,此时该如何转发?()A)与传统网络一样,同样进行仿真转发,再还原B)对与两份完全一样的报文,在备用AC端口进行丢弃C)对与两份完全一样的报文,在接入侧设备进行选收D)对与两份完全一样的报文,在接入侧设备进行并收,透传给基站答案:B解析:9.[单选题]下面评估内容不属于结构评估的是A)超大环和超长链B)成环率C)超大汇聚节点D)双归保护结构答案:D解析:10.[单选题]PTN640设备在配置1:1保护时,LSP标签值正向与反向( )A)可以相同;B)一定相同;C)一定不同;D)没有要求。
机器人顶刊论文
机器人顶刊论文机器人领域内除开science robotics以外,TRO和IJRR是机器人领域的两大顶刊,最近师弟在选择研究方向,因此对两大顶刊的论文做了整理。
TRO的全称IEEE Transactions on Robotics,是IEEE旗下机器人与自动化协会的汇刊,最新的影响因子为6.123。
ISSUE 61 An End-to-End Approach to Self-Folding Origami Structures2 Continuous-Time Visual-Inertial Odometry for Event Cameras3 Multicontact Locomotion of Legged Robots4 On the Combined Inverse-Dynamics/Passivity-Based Control of Elastic-Joint Robots5 Control of Magnetic Microrobot Teams for Temporal Micromanipulation Tasks6 Supervisory Control of Multirotor Vehicles in Challenging Conditions Using Inertial Measurements7 Robust Ballistic Catching: A Hybrid System Stabilization Problem8 Discrete Cosserat Approach for Multisection Soft Manipulator Dynamics9 Anonymous Hedonic Game for Task Allocation in a Large-Scale Multiple Agent System10 Multimodal Sensorimotor Integration for Expert-in-the-Loop Telerobotic Surgical Training11 Fast, Generic, and Reliable Control and Simulation of Soft Robots Using Model Order Reduction12 A Path/Surface Following Control Approach to Generate Virtual Fixtures13 Modeling and Implementation of the McKibben Actuator in Hydraulic Systems14 Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving15 Robust Planar Odometry Based on Symmetric Range Flow and Multiscan Alignment16 Accelerated Sensorimotor Learning of Compliant Movement Primitives17 Clock-Torqued Rolling SLIP Model and Its Application to Variable-Speed Running in aHexapod Robot18 On the Covariance of X in AX=XB19 Safe Testing of Electrical Diathermy Cutting Using a New Generation Soft ManipulatorISSUE 51 Toward Dexterous Manipulation With Augmented Adaptive Synergies: The Pisa/IIT SoftHand 22 Efficient Equilibrium Testing Under Adhesion and Anisotropy Using Empirical Contact Force Models3 Force, Impedance, and Trajectory Learning for Contact Tooling and Haptic Identification4 An Ankle–Foot Prosthesis Emulator With Control of Plantarflexion and Inversion–Eversion Torque5 SLAP: Simultaneous Localization and Planning Under Uncertainty via Dynamic Replanning in Belief Space6 An Analytical Loading Model for n -Tendon Continuum Robots7 A Direct Dense Visual Servoing Approach Using Photometric Moments8 Computational Design of Robotic Devices From High-Level Motion Specifications9 Multicontact Postures Computation on Manifolds10 Stiffness Modulation in an Elastic Articulated-Cable Leg-Orthosis Emulator: Theory and Experiment11 Human–Robot Communications of Probabilistic Beliefs via a Dirichlet Process Mixture of Statements12 Multirobot Reconnection on Graphs: Problem, Complexity, and Algorithms13 Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras14 Reactive Trajectory Generation for Multiple Vehicles in Unknown Environments With Wind Disturbances15 Resource-Aware Large-Scale Cooperative Three-Dimensional Mapping Using Multiple Mobile Devices16 Control of Planar Spring–Mass Running Through Virtual Tuning of Radial Leg Damping17 Gait Design for a Snake Robot by Connecting Curve Segments and ExperimentalDemonstration18 Server-Assisted Distributed Cooperative Localization Over Unreliable Communication Links19 Realization of Smooth Pursuit for a Quantized Compliant Camera Positioning SystemISSUE 41 A Survey on Aerial Swarm Robotics2 Trajectory Planning for Quadrotor Swarms3 A Distributed Control Approach to Formation Balancing and Maneuvering of Multiple Multirotor UAVs4 Joint Coverage, Connectivity, and Charging Strategies for Distributed UAV Networks5 Robotic Herding of a Flock of Birds Using an Unmanned Aerial Vehicle6 Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures7 Decentralized Trajectory Tracking Control for Soft Robots Interacting With the Environment8 Resilient, Provably-Correct, and High-Level Robot Behaviors9 Humanoid Dynamic Synchronization Through Whole-Body Bilateral Feedback Teleoperation10 Informed Sampling for Asymptotically Optimal Path Planning11 Robust Tactile Descriptors for Discriminating Objects From Textural Properties via Artificial Robotic Skin12 VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator13 Zero Step Capturability for Legged Robots in Multicontact14 Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance15 Physically Plausible Wrench Decomposition for Multieffector Object Manipulation16 Considering Uncertainty in Optimal Robot Control Through High-Order Cost Statistics17 Multirobot Data Gathering Under Buffer Constraints and Intermittent Communication18 Image-Guided Dual Master–Slave Robotic System for Maxillary Sinus Surgery19 Modeling and Interpolation of the Ambient Magnetic Field by Gaussian Processes20 Periodic Trajectory Planning Beyond the Static Workspace for 6-DOF Cable-Suspended Parallel Robots1 Computationally Efficient Trajectory Generation for Fully Actuated Multirotor Vehicles2 Aural Servo: Sensor-Based Control From Robot Audition3 An Efficient Acyclic Contact Planner for Multiped Robots4 Dimensionality Reduction for Dynamic Movement Primitives and Application to Bimanual Manipulation of Clothes5 Resolving Occlusion in Active Visual Target Search of High-Dimensional Robotic Systems6 Constraint Gaussian Filter With Virtual Measurement for On-Line Camera-Odometry Calibration7 A New Approach to Time-Optimal Path Parameterization Based on Reachability Analysis8 Failure Recovery in Robot–Human Object Handover9 Efficient and Stable Locomotion for Impulse-Actuated Robots Using Strictly Convex Foot Shapes10 Continuous-Phase Control of a Powered Knee–Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines11 Fundamental Actuation Properties of Multirotors: Force–Moment Decoupling and Fail–Safe Robustness12 Symmetric Subspace Motion Generators13 Recovering Stable Scale in Monocular SLAM Using Object-Supplemented Bundle Adjustment14 Toward Controllable Hydraulic Coupling of Joints in a Wearable Robot15 Geometric Construction-Based Realization of Spatial Elastic Behaviors in Parallel and Serial Manipulators16 Dynamic Point-to-Point Trajectory Planning Beyond the Static Workspace for Six-DOF Cable-Suspended Parallel Robots17 Investigation of the Coin Snapping Phenomenon in Linearly Compliant Robot Grasps18 Target Tracking in the Presence of Intermittent Measurements via Motion Model Learning19 Point-Wise Fusion of Distributed Gaussian Process Experts (FuDGE) Using a Fully Decentralized Robot Team Operating in Communication-Devoid Environment20 On the Importance of Uncertainty Representation in Active SLAM1 Robust Visual Localization Across Seasons2 Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers3 Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots4 The Boundaries of Walking Stability: Viability and Controllability of Simple Models5 A Novel Robotic Platform for Aerial Manipulation Using Quadrotors as Rotating Thrust Generators6 Dynamic Humanoid Locomotion: A Scalable Formulation for HZD Gait Optimization7 3-D Robust Stability Polyhedron in Multicontact8 Cooperative Collision Avoidance for Nonholonomic Robots9 A Physics-Based Power Model for Skid-Steered Wheeled Mobile Robots10 Formation Control of Nonholonomic Mobile Robots Without Position and Velocity Measurements11 Online Identification of Environment Hunt–Crossley Models Using Polynomial Linearization12 Coordinated Search With Multiple Robots Arranged in Line Formations13 Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums14 Online Approximate Optimal Station Keeping of a Marine Craft in the Presence of an Irrotational Current15 Ultrahigh-Precision Rotational Positioning Under a Microscope: Nanorobotic System, Modeling, Control, and Applications16 Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing17 Controlling Noncooperative Herds with Robotic Herders18 ε⋆: An Online Coverage Path Planning Algorithm19 Full-Pose Tracking Control for Aerial Robotic Systems With Laterally Bounded Input Force20 Comparative Peg-in-Hole Testing of a Force-Based Manipulation Controlled Robotic HandISSUE 11 Development of the Humanoid Disaster Response Platform DRC-HUBO+2 Active Stiffness Tuning of a Spring-Based Continuum Robot for MRI-Guided Neurosurgery3 Parallel Continuum Robots: Modeling, Analysis, and Actuation-Based Force Sensing4 A Rationale for Acceleration Feedback in Force Control of Series Elastic Actuators5 Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration6 Interaction Between Inertia, Viscosity, and Elasticity in Soft Robotic Actuator With Fluidic Network7 Exploiting Elastic Energy Storage for “Blind”Cyclic Manipulation: Modeling, Stability Analysis, Control, and Experiments for Dribbling8 Enhance In-Hand Dexterous Micromanipulation by Exploiting Adhesion Forces9 Trajectory Deformations From Physical Human–Robot Interaction10 Robotic Manipulation of a Rotating Chain11 Design Methodology for Constructing Multimaterial Origami Robots and Machines12 Dynamically Consistent Online Adaptation of Fast Motions for Robotic Manipulators13 A Controller for Guiding Leg Movement During Overground Walking With a Lower Limb Exoskeleton14 Direct Force-Reflecting Two-Layer Approach for Passive Bilateral Teleoperation With Time Delays15 Steering a Swarm of Particles Using Global Inputs and Swarm Statistics16 Fast Scheduling of Robot Teams Performing Tasks With Temporospatial Constraints17 A Three-Dimensional Magnetic Tweezer System for Intraembryonic Navigation and Measurement18 Adaptive Compensation of Multiple Actuator Faults for Two Physically Linked 2WD Robots19 General Lagrange-Type Jacobian Inverse for Nonholonomic Robotic Systems20 Asymmetric Bimanual Control of Dual-Arm Exoskeletons for Human-Cooperative Manipulations21 Fourier-Based Shape Servoing: A New Feedback Method to Actively Deform Soft Objects into Desired 2-D Image Contours22 Hierarchical Force and Positioning Task Specification for Indirect Force Controlled Robots。
VDA6.1质量体系要素提问分类和提问数

VDA6.1质量体系要素提问分类和提问数(注:因为企业最高管理者及其下属管理层对质量保证模式的规定、实施与监控起决定性影响,所以他们的参与是标准的根本要求。
这在提问表的分类中反映出来,所提问题本身也兼顾这一点。
因此,所提问题必须由企业内有关部门的负责人来回答。
)一、提问数量:U部分企业领导01 管理职责 602 质量体系 603 内部质量审核 404 培训,人员705 质量体系的财务考虑 406 产品安全性 4Z1 企业战略 5U部分总提问数36P部分产品与过程07 合同评审 508 设计控制(产品开发)709 过程控制(过程开发)710 文件和资料的控制 511 采购712顾客提供的产品的控制 413产品标识和可追溯性714过程控制715检验和试验 616检验、测量和试验设备的控制 517不合格品的控制 418纠正和预防措施 419搬运、贮存、包装、防护和交付 620质量记录的控制 421服务(售后服务、生产后的活动) 522统计技术 6P部分总提问数89总提问数125[就ISO9002标准来说为125-7(-7)=118(111)个问题,如无“顾客提供的产品”则提问数为125-7(-7)-4=114(107)个问题]VDA6.1标准有关条款VDA标准提问的具体问题U部分01 管理职责01.1* 是否由企业最高管理者规定了质量方针,并公布于各级人员?01.2* 基于企业策划和质量方针制定了质量目标,并对其结果进行监控?01.3* 持续改进过程(KVP)是否是质量方针的组成部分?01.4 企业最高管理者是否提供了必要的资源?01.5* 是否明确指定管理者代表,并规定其任务、权限和职责?01.6* 最高管理者是否定期评价质量体系的有效性?02 质量体系02.1* 质量体系是否在质量手册或等同的文件中加以描述?02.2 质量体系是否包括了企业内部所有的部门、层次和员工?02.3* 对于所有影响质量的活动是否在程序文件中规定了任务、职责和权限?02.4* 是否进行包含质量策划过程的项目管理工作?02.5* 为满足质量要求对于必要的措施和行动是否进行质量策划?02.6* 是否具有包含质量策划结果的质量计划?03 内部质量审核03.1* 实施内部质量审核的人员(审核员AUDITOREN)是否具备资格,并且独立被审核的部门?03.2* 是否根据审核计划,对质量体系所属的要素进行内部质量审核,并加以评价?03.3*是否针对不符合项采取纠正措施,并进行记录?03.4*是否根据审核计划,对产品和过程的要求进行内部质量审核,并加以评价?04 培训、人员04.1 是否定期根据人员与只能情况了解测定培训要求,并由此对企业中的各级人员采取不同的培训计划?04.2 在培训计划中是否包含了在质量技术方面的培训进修计划?04.3 在培训计划中是否包含了企业的最高管理者和各级管理人员?04.4* 员工新聘或调动时,引入新的或更改了的过程、工作流程等时,是否对员工安排一个指导/培训计划?04.5* 员工是否具有从事其工作的资格?04.6 是否具有调动积极性和提高质量意识的措施?04.7* 在企业内是否有一个已达到的质量现状与目标的对照说明,并清晰易懂?05 质量体系的财务考虑05.1 是否规定反映质量体系有效性的财务报告的编制方法?05.2* 有关负责人是否定期编制财务报告,并做数据分析?05.3* 是否具有由于未达到质量要求(不合格)而造成内部损失的证明?05.4* 是否具有由于未达到质量要求(不合格)而造成外部损失的证明?VDA6.1标准有关条款06 产品安全性06.1 产品责任的原则在企业内部是否众所周知?06.2 对于那些需要质量方面特别证明的产品和特定特性,是否确定和标识这些产品和特性的程序?(存档责任)06.3* 是否有用于识别产品风险的程序?06.4 是否有限制不合格品(影响)的应急计划和程序?Z1 企业战略Z1.1企业中是否包含成本、销售、质量等方面的战略性的计划?Z1.2是否有测定经营结果的方法,并且定期运用,以便实施改进?Z1.3是否将企业的绩效数据与采用行业水准比较法或类似方法而的出的结果进行比较,并在必要时,由此采取改进措施?Z1.4*是否有测定顾客满意程度并查明变化的程序?Z1.5企业中员工的满意程度是否是最高管理者的原则,并且不断加以维护?P部分:产品与过程07 合同评审,营销质量07.1 营销功能是否包含在流程组织中?07.2* 是否对询价、投标、合同/定单评审其完整性和可实现性,并加以批准?07.3 在制定标书时,是否查明技术上和商业上的成本?07.4 是否存在顾客对产品和质量体系方面的质量要求?07.5 是否有程序确保所有的参与部门都能及时知道和理解所有的产品规范?08 设计控制(产品开发)09 过程控制(过程开发)10 文件和资料的控制10.1* 对文件的标识、保管、审核和批准,是否规定了职责和程序?10.2 对于文件是否具有带更改服务的分发和保管制度?10.3 是否规定了文件在何处保存、如何保存以及保存期限?10.4 如何确保外来文件被及时采用,并受控?10.5 是否确保无效的文件不被使用?11 采购11.1 在给供方的采购文件中,是否清楚完整地规定了对产品和绩效方面的质量要求?11.2* 是否对评价和选择供方做了规定?11.3 对外购产品是否规定了样品检验?11.4 企业是否规定了定期对其供方进行评价的程序?11.5 与供方是否有关于质量检验方法和职责方面的协议?11.6* 外购产品和绩效的质量是否得到保证?11.7* 供方所供产品的可追溯性是否得到保证?12 顾客提供的产品的控制13 产品标识与可追溯性13.1 对内部流程是否规定了产品标识?13.2 能否确保通过过程控制措施来满足对产品的质量要求?13.3 是否记录过程参数并记录偏差和所采取的措施?13.4 生产和检测器具在使用闲置期是否合理存放和保护?13.5* 是否保证只有满足质量要求的产品才能流到下一个过程/工序,才能进行交付?13.6 产品的特征数据是否能从交付追溯到进货?13.7* 对于批量生产的重新认可,是否具有相应的程序?VDA6.1标准有关条款14 过程控制14.1 是否对新的/维修过的机器(设备)以及在生产新产品和产品发生更改时进行能力调查?14.2* 对于新的和更改过的产品/过程,是否规定了批量生产认可的条件,并且与顾客商定?14.3 能否确保对重要的过程参数和产品特性进行监视和控制(调节)?14.4 对于设备和模具,是否具有模具管理和计划保养规定?14.5 是否规定了对特殊过程的要求?14.6 对产品和过程有影响的环境条件是否受控?14.7 是否通过相应的方法评价生产过程的有效性?15 检验和试验15.1 检验流程计划中的所有检验活动是否通过检验指导书加以说明?15.2 在检验指导书中是否规定了过程中的质量检验和相应的方法/技术?15.3 对外购的产品是否进行规定的质量证明?15.4 在过程/工序中是否进行规定的质量证明?15.5* 对最终产品是否进行规定的质量证明?15.6 是否有周期性检验和试验的证明?16 检验、测量和实验设备的控制16.1* 是否具有检验、测量和试验设备的鉴定、标识、控制、校准和保养的程序?16.2 是否规定了检验、测量和试验设备与国家和国际标准的联系(溯源性)?16.3 是否只有测量不确定度祖国小的检验、测量和试验设备才可投入使用?16.4 是否具有证明检验、测量和试验设备能力(检具能力)的程序?16.5 在检验、测量和试验设备发生故障和损坏时,是否规定了纠正措施?17 不合格品的控制17.1* 是否具有不合格品的控制程序?17.2 偏离规范的产品,供货前是否取得顾客的同意?17.3 返工是否根据计划实施,并且记录存档?17.4 是否有程序识别重复发生的不合格?18 纠正和预防措施18.1* 是否明确规定了落实和监督纠正措施的职责?18.2 是否有程序对可能的不合格进行风险估计并采取相应的预防措施?18.3 是否具有分析不合格原因的程序?18.4* 是否具有避免重复发生不合格的程序?19 搬运、贮存、包装、防护和交付19.1 是否具有“产品处置”(搬运、贮存、包装、防护和交付)的指导书?19.2 是否对发货前的包装和标识过程做了规定,并加以控制?19.3 是否能保证在贮存和运输过程中避免损坏或质量降低?19.4 是否有程序统计和消除包装不合格及运输损坏,并采取纠正措施?19.5 是否保证在运输和贮存过程中产品的标识?19.6* 是否有程序说明供货信誉?20 质量记录的控制20.1 对于质量记录的标识、审核和批准,是否规定了职责和程序?20.2 对于质量记录的分析评定和分发,是否具有程序和职责?20.3 是否规定了质量记录在何处保存、如何保存以及保存期限?20.4 合同约定时,是否规定质量记录如何提供顾客使用?21 服务(售后服务、生产后的活动)21.1 是否对产品使用和安装说明书的编制作出规定,并使说明书清楚易懂?VDA6.1标准有关条款21.2 是否具有进行产品观察的程序和产品使用阶段有关产品失效的早期报警系统?21.3 是否具有程序对使用中的产品失效进行分析,以及采取和监控纠正措施?21.4 售后服务只能是否包含在信息流中?21.5 如果有协议规定,是否具有服务活动的程序?22 统计技术22.1 是否了解使用统计技术的可能性并对其应用进行策划?22.2 在开发阶段,是否将统计技术应用于试验的策划和分析评定以及产品风险估计?22.3 对外购件的质量检验进行分析评定时是否应用统计技术?22.4 统计技术是否用于过程控制和过程优化?22.5 对最终的质量检验进行分析评定时,是否应用统计技术?22.6 统计技术是否应用于产品使用过程中的失效分析评定?VDA6.1标准条款详细内容01.1*是否由企业最高管理者规定了质量方针,并公布于各级人员?定义:质量方针(引用DIN EN ISO8402/3.1)由组织的最高管理者正式发布的该组织的质量宗旨和质量方向。
NX-series EtherCAT Coupler Unit用户手册说明书
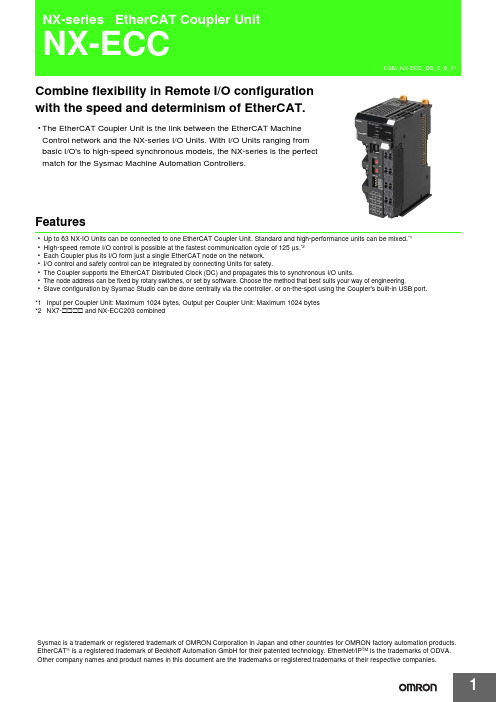
Combine flexibility in Remote I/O configurationwith the speed and determinism of EtherCAT.•The EtherCAT Coupler Unit is the link between the EtherCAT MachineControl network and the NX-series I/O Units. With I/O Units ranging frombasic I/O's to high-speed synchronous models, the NX-series is the perfectmatch for the Sysmac Machine Automation Controllers.Features•Up to 63 NX-IO Units can be connected to one EtherCAT Coupler Unit. Standard and high-performance units can be mixed.*1•High-speed remote I/O control is possible at the fastest communication cycle of 125 μs.*2•Each Coupler plus its I/O form just a single EtherCAT node on the network.•I/O control and safety control can be integrated by connecting Units for safety.•The Coupler supports the EtherCAT Distributed Clock (DC) and propagates this to synchronous I/O units.•The node address can be fixed by rotary switches, or set by software. Choose the method that best suits your way of engineering.•Slave configuration by Sysmac Studio can be done centrally via the controller, or on-the-spot using the Coupler's built-in USB port.*1Input per Coupler Unit: Maximum 1024 bytes, Output per Coupler Unit: Maximum 1024 bytes*2NX7-@@@@ and NX-ECC203 combinedSysmac is a trademark or registered trademark of OMRON Corporation in Japan and other countries for OMRON factory automation products. EtherCAT is a registered trademark of Beckhoff Automation GmbH for their patented technology. EtherNet/IP TM is the trademarks of ODVA. Other company names and product names in this document are the trademarks or registered trademarks of their respective companies.System ConfigurationSystem Configuration of Slave TerminalsThe following figure shows an example of the system configuration when an EtherCAT Coupler Unit is used as a Communications Coupler Unit.*1.The connection method for the Sysmac Studio depends on the model of the CPU Unit or Industrial PC.*2.An EtherCAT Slave Terminal cannot be connected to any of the OMRON CJ1W-NC @81/@82 Position Control Units even though they canoperate as EtherCAT masters.*3.For whether NX Units can be connected to the CPU Unit or Communications Coupler Unit to be used, refer to the user's manual for the CPUUnit or Communications Coupler Unit to be used.EtherCAT master *2Sysmac Studio Support SoftwareOrdering InformationApplicable standardsRefer to the OMRON website () or ask your OMRON representative for the most recent applicable standards for each model.*1.This depends on the specifications of the EtherCAT master. For example, the values are as follows when the EtherCAT Coupler Unit isconnected to the built-in EtherCAT port on an NJ5-series CPU Unit: 500 μs, 1,000 μs, 2,000 μs, and 4,000 μs. Refer to the NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (Cat. No. W505) for the specifications of the built-in EtherCAT ports on NJ/NX-series CPU Units.*2.This depends on the Unit configuration.Recommended EtherCAT Communications CableUse a straight STP (shielded twisted-pair) cable of category 5 or higher with double shielding (braiding and aluminum foil tape) for EtherCAT.Cable with Connectors*1.Standard type cables length 0.2, 0.3, 0.5, 1, 1.5, 2, 3, 5, 7.5, 10, 15 and 20 m are available.Rugged type cables length 0.3, 0.5, 1, 2, 3, 5, 10 and 15 m are available.For details, refer to Cat.No.G019.*2.The lineup features Low Smoke Zero Halogen cables for in-cabinet use and PUR cables for out-of-cabinet use. Although the LSZH cable issingle shielded, its communications and noise characteristics meet the standards.*3.Cables colors are available in blue, yellow, or Green.*4.For details, contact your OMRON representative.Product nameCommunications cycle inDC Mode *1 *2Current consumptionMaximum I/O power supply current Model EtherCAT Coupler Unit250 to 4,000 μs 1.45 W or lower4 ANX-ECC20110 ANX-ECC202125 to 10,000 μs 1.25 W or lower NX-ECC203ItemAppearanceRecommended manufacturerCable length [m] *1ModelCable with Connectors on Both Ends (RJ45/RJ45)Standard RJ45 plugs type *1Wire gauge and number of pairs: AWG26, 4-pair cable Cable sheath material: LSZH *2Cable color: Yellow *3OMRON0.3XS6W-6LSZH8SS30CM-Y 0.5XS6W-6LSZH8SS50CM-Y 1XS6W-6LSZH8SS100CM-Y 2XS6W-6LSZH8SS200CM-Y 3XS6W-6LSZH8SS300CM-Y 5XS6W-6LSZH8SS500CM-Y Cable with Connectors on Both Ends (RJ45/RJ45)Rugged RJ45 plugs type *1Wire gauge and number of pairs: AWG22, 2-pair cable Cable color: Light blueOMRON0.3XS5W-T421-AMD-K 0.5XS5W-T421-BMD-K 1XS5W-T421-CMD-K 2XS5W-T421-DMD-K 5XS5W-T421-GMD-K 10XS5W-T421-JMD-K Cable with Connectors on Both Ends (M12 Straight/M12 Straight)Shield Strengthening Connector cable *4M12/Smartclick ConnectorsWire Gauge and Number of Pairs: AWG22, 2-pair Cable Cable color: BlackOMRON0.5XS5W-T421-BM2-SS 1XS5W-T421-CM2-SS 2XS5W-T421-DM2-SS 3XS5W-T421-EM2-SS 5XS5W-T421-GM2-SS 10XS5W-T421-JM2-SS Cable with Connectors on Both Ends (M12 Straight/RJ45)Shield Strengthening Connector cable *4M12/Smartclick Connectors Rugged RJ45 plugs typeWire Gauge and Number of Pairs: AWG22, 2-pair Cable Cable color: BlackOMRON0.5XS5W-T421-BMC-SS 1XS5W-T421-CMC-SS 2XS5W-T421-DMC-SS 3XS5W-T421-EMC-SS 5XS5W-T421-GMC-SS 10XS5W-T421-JMC-SSCables / ConnectorsWire Gauge and Number of Pairs: AWG24, 4-pair Cable*We recommend you to use above cable and connector together.Wire Gauge and Number of Pairs: AWG22, 2-pair Cable*We recommend you to use above cable and connector together.Note:Connect both ends of cable shielded wires to the connector hoods.Optional ProductsAccessoriesEnd Cover (NX-END01)An End Cover is connected to the end of the EtherCAT Slave Terminal.One End Cover is provided together with the EtherCAT Coupler Unit.ItemAppearanceRecommended manufacturerModelCables-Hitachi Metals, STAR-C5E SAB 0.5 × 4P CP *-Kuramo Electric Co.KETH-SB *-SWCC Showa Cable Systems Co.FAE-5004 *RJ45 Connectors-Panduit CorporationMPS588-C *ItemAppearanceRecommended manufacturer ModelCables-Kuramo Electric Co.KETH-PSB-OMR *-JMACS Japan Co., Ltd.PNET/B *RJ45 Assembly ConnectorOMRONXS6G-T421-1 *Product nameSpecificationModelUnit/Terminal Block Coding PinsPins for 10 Units(30 terminal block pins and 30 Unit pins)NX-AUX02Product NameSpecificationModelNo. of terminals Ground terminal mark Terminal current capacity Terminal Block8Present10 ANX-TBC082General Specification*Refer to the OMRON website (/) or consult your OMRON representative for the most recent applicable standards for each model.SpecificationsEtherCAT Coupler Unit NX-ECC201/NX-ECC202/NX-ECC203*1.Refer to the NX-series Safety Control Units User’s Manual (Cat. No. Z930) for the number of Safety Control Units that can be connected.*2.This function was added or improved for a version upgrade. Refer to the NX-series EtherCAT Coupler Unit User’s Manual (Cat. No. W519) forinformation on version upgrades.*3.The range of node addresses that can be set depends on the model of the built-in EtherCAT port. For the node address ranges that can beset for a built-in EtherCAT port, refer to the user's manual for the built-in EtherCAT port on the connected CPU Unit or Industrial PC.*4.This depends on the specifications of the EtherCAT master. For example, the values are as follows when the EtherCAT Coupler Unit isconnected to the built-in EtherCAT port on an NJ5-series CPU Unit: 500 μs, 1,000 μs, 2,000 μs, and 4,000 μs. For the specifications of the built-in EtherCAT port, refer to the user's manual for the built-in EtherCAT port on the connected CPU Unit or the Industrial PC.*5.This depends on the Unit configuration.*6.There are restrictions in the communications cycles that you can set for some of the NX Units. If you use any of those NX Units, set acommunications cycle that will satisfy the specifications for the refresh cycles that can be executed by the NX Unit. Refer to the appendix of the NX-series Data Reference Manual (Cat. No. W525-E1-07 or later) to see if there are restrictions on any specific NX Units. For information on the communications cycles that you can set, refer to the user’s manuals for the NX Units.*7.Refer to the NX-series EtherCAT Coupler Unit User’s Manual (Cat. No. W519) for procedures for designing the Unit power supply system andI/O power supply system.*e a voltage that is appropriate for the I/O circuits of the NX Units and the connected external devices.ItemSpecificationEnclosureMounted in a panel Grounding methodGround to 100 Ω or less Operating environmentAmbient operating temperature 0 to 55°CAmbient operating humidity 10% to 95% (with no condensation or icing)AtmosphereMust be free from corrosive gases.Ambient storage temperature −25 to 70°C (with no condensation or icing)Altitude2,000 m max.Pollution degree Pollution degree 2 or less: Meets IEC 61010-2-201.Noise immunity Conforms to IEC61000-4-4. 2 kV (power supply line)Overvoltage category Category II: Meets IEC 61010-2-201.EMC immunity level Zone BVibration resistance Conforms to IEC 60068-2-6.5 to 8.4 Hz with 3.5-mm amplitude, 8.4 to 150 Hz, acceleration of 9.8 m/s 2, 100 min each in X, Y, and Z directions (10 sweeps of 10 min each = 100 min total)Shock resistanceConforms to IEC 60068-2-27. 147 m/s 2, 3 times each in X, Y, and Z directions Applicable standards *cULus: Listed (UL 508 or UL61010-2-201), ANSI/ISA 12.12.01,EU: EN 61131-2, C-Tick or RCM, KC Registration, NK, and LRItemSpecificationNX-ECC201NX-ECC202NX-ECC203Number of connectable NX Units 63 Units max.*1Send/receive PDO data sizes Input: 1,024 bytes max. (including input data, status, and unused areas)Output: 1,024 bytes max. (including output data and unused areas)Mailbox data size Input: 256 bytes Output: 256 bytesMailboxEmergency messages and SDO requestsRefreshing methods *2•Free-Run refreshing •Synchronous I/O refreshing •Time stamp refreshing•Free-Run refreshing•Synchronous I/O refreshing •Time stamp refreshing •Task period prioritized refreshingNode address setting rangeWhen the settable node address range for the built-in EtherCAT port is 1 to 512*3•Set on switches: 1 to 199•Set with the Sysmac Studio: 1 to 512When the settable node address range for the built-in EtherCAT port is 1 to 192*3•Set on switches: 1 to 192•Set with the Sysmac Studio: 1 to 192I/O jitter performanceInputs: 1 μs max.Outputs: 1 μs munications cycle in DC Mode250 to 4,000 μs *4 *5125 to 10,000 μs *3 *4 *6Unit power supply *7Power supply voltage24 VDC (20.4 to 28.8 VDC)NX Unit power supply capacity10 W max.Refer to Installation orientation and restrictions for details.NX Unit power supply efficiency 70%Isolation methodNo isolation between NX Unit power supply and Unit power supply terminals Current capacity of power supply terminals4 A max.I/O powersupply *7Power supply voltage5 to 24 VDC (4.5 to 28.8 VDC) *8Maximum I/O power supply current4 A 10 A Current capacity of power supply terminals4 A max.10 A max.NX Unit power consumption1.45 W max. 1.25 W max.Current consumption from I/O power supply 10 mA max. (for 24 VDC)Dielectric strength 510 VAC for 1 min, leakage current: 5 mA max. (between isolated circuits)Insulation resistance100 VDC, 20 M Ω min. (between isolated circuits)EtherCAT Communications Specifications*The EtherCAT Coupler Unit conforms to EtherCAT standards. Check the specifications of the EtherCAT master being connected for the configurable topology. However, note that only NX-ECC203 EtherCAT Coupler Units (Ver. 1.5 or later) is compatible with a ring topology.Version InformationNote:Some Units do not have all of the versions given in the above table. If a Unit does not have the specified version, support is provided by theoldest available version after the specified version. Refer to the user's manuals for the specific Units for the relation between models and versions.*1For the NX-ECC202, there is no unit version of 1.1 or earlier.*2For the NX-ECC203, there is no unit version of 1.2 or earlier.ItemSpecificationCommunications standard IEC 61158 Type 12Physical layer 100BASE-TX (IEEE 802.3)Modulation Baseband Baud rate 100 MbpsTopologyDepends on the specifications of the EtherCAT master. *Transmission mediaCategory 5 or higher twisted-pair cable (Recommended cable: double-shielded cable with aluminum tape and braiding)Transmission distance Distance between nodes: 100 m or lessModel number of EtherCAT Coupler UnitUnit version Corresponding versionsUsing an NX-series CPU Unit Using an NJ-series CPU Unit Using an NY-series Industrial PC Unit version of CPU UnitSysmac StudioversionUnit version of CPU Unit Sysmac Studioversion Unit version of Industrial PCSysmac StudioversionNX-ECC201Ver. 1.2Ver. 1.10Ver. 1.13Ver. 1.07Ver. 1.08Ver. 1.12Ver. 1.17Ver. 1.1Ver. 1.06Ver. 1.07Ver. 1.0Ver. 1.05Ver. 1.06NX-ECC202Ver. 1.2*1Ver. 1.07Ver. 1.08NX-ECC203Ver. 1.7Ver. 1.41Ver. 1.41Ver. 1.41Ver. 1.6Ver. 1.25Ver. 1.25Ver. 1.25Ver. 1.5Ver. 1.19Ver. 1.19Ver. 1.19Ver. 1.4Ver. 1.16Ver. 1.16Ver. 1.17Ver. 1.3*2Ver. 1.13Ver. 1.13External InterfaceEtherCAT Coupler Unit NX-ECC20@Terminal BlockApplicable Terminal Blocks for Each Unit ModelSymbol NameFunction(A)NX bus connectorThis connector is used to connect each Unit.(B)IndicatorsThe indicators show the current operating status of the Unit.(C)Communications connectors These connectors are connected to the communications cables of the EtherCAT network.There are two connectors, one for the input port and one for the output port.(D)Peripheral USB port This port is used to connect to the Sysmac Studio Support Software.(E)Terminal block The terminal block is used to connect external devices.The number of terminals depends on the type of Unit.(F)Rotary switches These rotary switches are used to set the 1s digit and 10s digit of the node address of the EtherCAT Coupler Unit as an EtherCAT slave. The address is set in decimal.(G)DIP switchThe DIP switch is used to set the 100s digit of the node address of the EtherCAT Coupler Unit as an EtherCAT slave.Symbol NameFunction(A)Terminal number indications The terminal numbers (A1 to A8 and B1 to B8) are displayed.The terminal number indicators are the same regardless of the number of terminals on the terminal block, as shown above.(B)Release holes Insert a flat-blade screwdriver into these holes to connect and remove the wires.(C)Terminal holes The wires are inserted into these holes.(D)Ground terminal markThis mark indicates the ground terminals. Only the NX-TBC082 has this mark.Unit modelCurrent capacity ofUnit's power supply terminals Terminal BlocksUnit power supplyI/O power supplyModelNo. of terminalsGround terminalmark Terminal currentcapacity NX-ECC201 4 A NX-TBC0828Present 10 A NX-ECC202 or NX-ECC2034 A10 ANX-TBC0828Present10 A(B)(D)(E)Eight-terminal Block(A)NX-TBC082Applicable WiresUsing FerrulesIf you use ferrules, attach the twisted wires to them.Observe the application instructions for your ferrules for the wire stripping length when attaching ferrules.Always use plated one-pin ferrules. Do not use unplated ferrules or two-pin ferrules.The applicable ferrules, wires, and crimping tool are given in the following table.*1.Some AWG 14 wires exceed 2.0 mm 2 and cannot be used in the screwless clamping terminal block.When you use any ferrules other than those in the above table, crimp them to the twisted wires so that the following processed dimensions are achieved.Using Twisted Wires/Solid WiresIf you use the twisted wires or the solid wires, use the following table to determine the correct wire specifications.*1Secure wires to the screwless clamping terminal block. Refer to the Securing Wires in the USER'S MANUAL for how to secure wires.*2With the NX-TB @@@1 Terminal Block, use twisted wires to connect the ground terminal. Do not use a solid wire.<Additional Information> If more than 2 A will flow on the wires, use plated wires or use ferrules.Terminal typesManufacturerFerrule model Applicable wire (mm 2 (AWG))Crimping toolTerminals other than ground terminalsPhoenix Contact AI0,34-80.34 (#22)Phoenix Contact (The figure in parentheses is the applicable wire size.)CRIMPFOX 6 (0.25 to 6 mm 2, AWG 24 to 10)AI0,5-80.5 (#20)AI0,5-10AI0,75-80.75 (#18)AI0,75-10AI1,0-8 1.0 (#18)AI1,0-10AI1,5-8 1.5 (#16)AI1,5-10Ground terminalsAI2,5-102.0 *1Terminals other than ground terminalsWeidmuller H0.14/120.14 (#26)Weidmueller (The figure in parentheses is the applicable wire size.)PZ6 Roto (0.14 to 6 mm 2, AWG 26 to 10)H0.25/120.25 (#24)H0.34/120.34 (#22)H0.5/140.5 (#20)H0.5/16H0.75/140.75 (#18)H0.75/16H1.0/14 1.0 (#18)H1.0/16H1.5/14 1.5 (#16)H1.5/16TerminalsWire typeWire sizeConductor length(stripping length)Twisted wires Solid wire Classification Current capacity Plated Unplated Plated UnplatedAll terminals except ground terminals2 A max.Possible Possible Possible Possible0.08 to 1.5 mm 2AWG28 to 168 to 10 mmGreater than2 A and 4 A or less Not Possible Possible*1NotPossible Greater than 4 A Possible *1NotPossibleGround terminals ---Possible PossiblePossible *2Possible*22.0 mm 29 to 10 mm1.6 mm max.2.0 mm max.(Ground terminals)(Ground terminals)Conductor length (stripping length)Dimensions(Unit: mm)EtherCAT Coupler Unit● EtherCAT Coupler Unit Only*The dimension is 1.35 mm for Units with lot numbers through December 2014.● With Cables Connected*1.*2.•• 1.5NX-ECC 11End Cover*This is the shape for Units with lot numbers through December 2014.Related Manuals Man. No Model Manual ApplicationDescription W519NX-ECC20@NX-series EtherCAT Coupler Unit User’s ManualLeaning how to use anNX-series EtherCATCoupler Unit andEther-CAT Slave Terminals The following items are described: the overall system and configuration methods of an EtherCAT Slave Terminal (which consists of an NX-series EtherCAT Coupler Unit and NX Units), and information on hardware, setup, and functions to setup, control, and monitor NX Units through EtherCAT.2020.6In the interest of product improvement, specifications are subject to change without notice. OMRON CorporationIndustrial Automation Company/(c)Copyright OMRON Corporation 2020 All Right Reserved.。
第1章 机器人控制技术绪论 机器人原理及控制技术 教学课件
随 着 先 进 飞 机 制 造 的 需 要 , 美 国 麻 省 理 工 学 院 辐 射 实 验 室 ( MIT Radiation Laboratory)开始研制数控铣床。
1953年研制成功能按照模型轨迹做切削动作的多轴数控铣床。
1954年 “可编程”“示教再现”机器人
美国国家标准局(NBS)的定义:机器人是一种能够进行编程并在自动 控制下执行某些操作和移动作业任务的机械装置。
美国机器人协会(RIA)的定义:机器人是一种用于移动各种材料、零 件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有 编程能力的多功能机械手。
日本工业机器人协会(JIRA)的定义:工业机器人是一种装备有记忆装 置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动 的通用机器。
日本早稻田大学加藤一朗(日本机器人之父) 教授认为:机器人是由能 工作的手,能行动的脚和有意识的头脑组成的个体,同时具有非接触传 感器(相当于耳、目)、接触传感器(相当于皮肤)、固有感及平衡感 等感觉器官的能力。
2020/10/3
智能与控制工程研究所
12
也有一些组织和学者针对不同形式的机器人分别给出具体的解释 和定义,而机器人则只作为一种总称。例如,日本工业机器人协 会(JIRA)列举了6种型式的机器人:
2020/10/3
智能与控制工程研究所
8
80年代 开始进入智能机器人研究阶段
80年代,不同结构、不同控制方法和不同用途的工业机器人在工业发达国 家真正进入了实用化的普及阶段。
随着传感技术和智能技术的发展,开始进入智能机器人研究阶段。
机器人视觉、触觉、力觉、接近觉等项研究和应用,大大提高了机器人的 适应能力,扩大了机器人的应用范围,促进了机器人的智能化进程。
汽车实用英语教材讲义讲稿 汽车维修英语 第5讲 Power train system(传动系统)

a. 2:1 b. 24:12 c. 1:2 d. 12:24
2. Which of the following system can reverse the vehicle direction?
a. Suspension
b. Transmission
c. Cooling
d. Braking
3. Which one is not right?
» CLUTCH
2. The main parts of the clutch
– Figure 2-106 shows the main parts of the clutch: the flywheel, clutch disc, pressure plate assembly, clutch release bearing and the clutch fork. When the clutch is disengaged, the flywheel and the pressure plate rotate independently. When the clutch is engaged, the pressureplate clamps the clutch disc to the flywheel, and the engine was connected to the transmission.
a. Suspension
b. Lubrication
c. Transmission
d. Braking
• 英译中
1. The transmission is designed to change the torque applied to the driving wheels for different applications.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MANIPULATOR BOOTS The special emphasis on cell containment at ORNL requires that all manipulators be equipped with boots to seal the cell opening for the manipulator. This requirement has enlarged the maintenance problem
mechanical devices, and other simple techniques to minimize personnel radiation exposure. Remotely operated manipulator-type work started at Oak Ridge National Laboratory in 1953 with the installation of a CRL Model 4 unit in the Solid State Division hot cells. Since that time, the
By acceptance oi this article, tho puhftr^^
V- I P K - H ' a.'.kM.-v.'!- r'~v'i t h o 1J.S.CV.;v.'
iu ni t o fuUi;n 3 n o n - e x c l u s i v e , royt»::,
fabricated six portable dollies of a modified "A" frame design that incorporates a hydraulic cylinder. The dollies are designed so that When
they become a part of the unit for transportation purposes.
taken to the repair shop, the manipulator is placed in a glove box for cleaning or decontamination, and the dolly is then available for other service.
in that, with booted units, 50 to 60 percent of the vaaintenance lies in replacing worn or damaged boots. Therefore, in 1961 the Research
Services Department instituted a development program to provide a material and a means of producing boots that would meet the needs of the Laboratory. This investigation resulted in a spray menipulations that could be performed by the human hand.
resulting master-slave manipulators have proven to be a very useful device for research activities, particularly in the nuclear energy field. Early handling techniques included tongs, over-the-wall
fabrication in which liquid urethane rubber is used.
-3-
From a maintenance standpoint, the protection afforded a manipulator by the use of boots has prolonged slave-end bearing life and has considerably decreased mechanical failures. Since the number of manipulator removals for boot changes needed to be reduced and since nearly all boot failures occurred in the gauntlet area, a two-piece boot is now in use in many hot cells at the Laboratory. This two-piece boot is fabricated so that
INTRODUCTION
Master-slave manipulators were developed because a need arose for a tool that could operate in hostile environments behind barricades or through shielding walls. This tool must be capable of making all The
number of manipulators has increased to 283 (see Table 1 ) . To provide the necessary maintenance for this number of manipulators, the Laboratory has developed a specially trained crew of one foreman, eleven millwrights, and one electrician. The contents of this paper will be limited to the maintenance history and the available information used at the Laboratory for procuring present-generation manipulators and manipulators' booting. With the advent of reactor fuel recycle systems and the environmental impact of waste handling, it is conceivable that we are at the threshold of an entirely new generation of remote handling devices.
of manipulator boot.s and the development of precise procedures for accomplishing the maintenance of 283 installed units. To provide
the most economical type of preventive maintenance, a very satisfactory computer-programmed maintenance system has been established at the. Laboratory.
and the other two are used for clean repairs and boot fabrication. The units weigh from 140 to 450 kilograms and are awkward to handle; so it was necessary to design and fabricate all the handling equipment for the dual purposes of cell installation or removal and transportation to and from the repair facility. The Laboratory has
liceriho in and to any copirijht cover* ng MASTER-SLAVE MANIPULATORS AND REMOTEticie. MAINTENANCE AT THE OAK RIDGE A fj • NATIONAL LABORATORY* (j©0</ - 7^/0 J</- - /
R. G. Jenness & C* D. Wicker OaktRidge National laboratory Oak Ridge, Tennessee 37830
Tim ttpoit wai ptepaied if «n •ccoum of wuih tpotuuied by the Vnil&t 5fi(n (nwnnmtnt Neilhct ihe United Statci nor die United Slato tnetgy He««(h md Development AdmirUirrKiiin, nur any of their employeei, fun iny of then cor.itavtoit, »ubconinclon, or their employeet, naka any wurnmy, enprru or implied, or iwume) any Irjt^I lubibly or ittpaniibtlitr tar the accutacy, nirnpbieneu or uKtuInev or any infuirrulion, apparatui, piutluct m pfocri! dUcluKd, or rvpreicntt that UP. me would not Infringe primely owned riftM*.