对称阀控制非对称缸电液伺服系统建模分析
基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真
N L = pLQL = (p1 - p2 ) (Q1 + Q 2 ) /2
( 2)
设液压缸的输出功率 N c 为
N c= FLv
( 3)
式中: FL 为液压缸负载, F L = A 1p1 - A2 p2;
v为液压缸活塞的运动速度, v = Q1 /A1 = Q2 /A2。 令 N = N c - N L, 由式 ( 1)、 ( 2 )、 ( 3) 可得
所以, 可以将比例放大器和比例方向阀结合起来 看成一个比例环节, 传递函数为
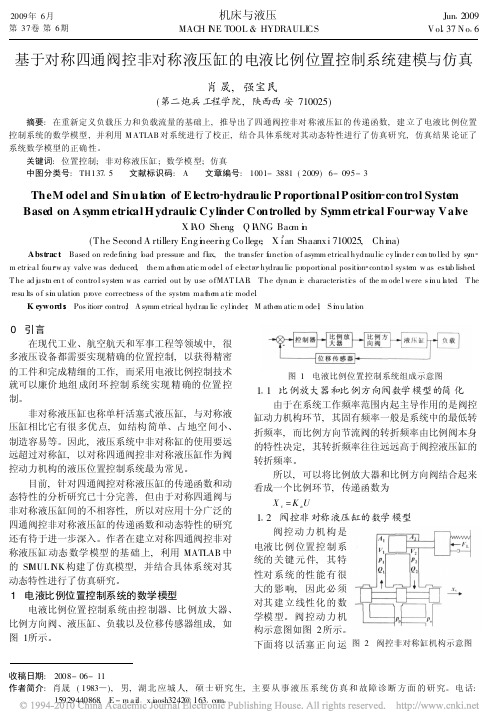
X v = K aU 1 2 阀控非对称液压缸的数学模型
阀控动力机构是
电液 比 例 位置 控 制 系 统的 关 键 元 件, 其 特 性对 系 统 的性 能 有 很 大的 影 响, 因 此 必 须 对其 建 立 线性 化 的 数 学模 型。 阀 控 动 力 机 构示意图如图 2所示。 下面 将 以 活塞 正 向 运 图 2 阀控非对称缸机构示意图
1 电液比例位置控制系统的数学模型 电液比例位置 控制系 统由控 制器、比 例放 大器、
比例方向阀、液压缸、负载以及位移传感器组成, 如 图 1所示。
图 1 电液比例位置控制系统组成示意图
1 1 比例放大器和比例方向阀数学模型的简化 由于在系统工作频率范围内起主导作用的是阀控
缸动力机构环节, 其固有频率一般是系统中的最低转 折频率, 而比例方向节流阀的转折频率由比例阀本身 的特性决定, 其转折频率往往远远高于阀控液压缸的 转折频率。
电液伺服系统的建模与控制研究

电液伺服系统的建模与控制研究引言:电液伺服系统(Electro-Hydraulic Servo System)是一种广泛应用于机械领域的控制系统,其通过电气信号控制液压元件,实现对物体位置、速度和力的精确控制。
随着工业自动化技术的不断发展,电液伺服系统在工业生产中的重要性越来越突出。
本文将从电液伺服系统的建模与控制两个方面展开研究,深入探讨其原理和应用。
一、电液伺服系统的建模电液伺服系统的建模是研究其工作原理和特性的基础。
建模是将实际系统转化为数学模型,通过模型分析和仿真研究系统的性能。
电液伺服系统的建模过程涉及到液压传动、机械传动、电气传动以及控制算法等多个方面。
1. 液压传动的建模液压传动是电液伺服系统中最关键的部分,其负责将电信号转化为液压信号,并通过液压元件传递给执行机构。
液压元件包括液压泵、阀门、缸筒等。
液压泵将液体加压,并通过阀门控制液体的流动。
液压缸通过泵送的压力作用,实现对物体位置、速度和力的控制。
液压传动的建模需要考虑压力、流量、阀门开度等方面的变化,利用流体力学和控制理论进行数学描述。
2. 机械传动的建模机械传动是将液压力转化为机械力,实现力的传递和位置的控制。
机械传动包括齿轮传动、皮带传动、曲柄机构等,其目的是将液压系统提供的力矩和转速传递给负载。
机械传动的建模需要考虑传动效率、摩擦损耗等因素,通过机械动力学和力学原理进行数学描述。
3. 电气传动的建模电气传动是将输入信号转化为电气信号,并通过电子元件和电机来实现力和速度的控制。
电气传动包括信号转换、功率放大、速度控制等。
常见的电气传动元件有电阻、电容、电感等,电机则是实现力和速度控制的核心部件。
电气传动的建模需要考虑电路理论和电机原理,通过电路分析和电机模型进行数学描述。
4. 控制算法的建模控制算法是电液伺服系统中实现控制和调节的关键。
常见的控制算法有比例控制、PID控制、模糊控制等。
控制算法的建模需要考虑系统的动态特性和控制目标,通过控制理论和信号处理进行数学描述。
阀控非对称液压缸建模方法研究
阀控非对称缸频域建模研究吕云嵩(南京工程学院机械系南京 211167)摘要:阀控非对称缸的数学模型包含两个不相等的子模型,为便于经典控制理论分析处理,其频域模型必须整合为单一解析式。
针对以往不考虑系统结构的影响,利用负载压力和负载流量的定义实现整合的不足,提出了阀控缸的统一频域模型——分段传递函数。
在函数结构参数分析的基础上,借助数字仿真,探讨了典型系统模型整合算法与系统结构因素间的关系,提出了变量整合、参数整合的概念和方法,给出了通过分段传递函数整合获得等效传递函数的建模方案。
对常规液压伺服系统,等效传递函数的阶跃响应与数字仿真基本吻合,与以往模型相比精度明显改善。
主题词:非对称缸建模液压频域分析中图分类号:TH137.520 前言阀控非对称缸是一种用途广泛的液压动力机构,其数学建模问题也是近年来国内理论界关注的一个热点问题。
非对称缸活塞两侧面积不等,描述其正反向工作油路的数学模型也不同。
当油路切换时,数学模型随之转换,因此阀控非对称缸的数学模型是含有两个子模型的分段模型。
分段模型不便于经典控制理论分析处理,所以早期液压伺服理论只以数学上容易处理的对称缸为研究对象[1]。
刘长年教授首先研究了非对称缸建模[2]。
其后又有一些学者开展了相关研究[3-7],其范围涵盖频域和状态方程建模。
状态方程因凭借现代数字仿真技术,成功地解决了分段模型的解算难题,受到当今学术界的普遍重视[5-9]。
但数值解只能利用图线对响应的总体特征作结论性描述,不像频域分析那样能清晰地体现系统的构成及其响应的物理本质,故状态方程在现阶段还不能完全取代频域模型。
对于非对称系统,频域建模的难点在于分段模型的整合。
长期以来,这项研究一直沿用对称缸的方法,把研究重点放在负载压力和负载流量的定义上[2-6],其实质就是通过变量整合实现微分方程的整合。
由于这种方法不能反映系统结构因素对模型的影响,所以建模误差较大。
国外近年来的研究偏重于数字仿真和系统控制等应用领域,在频域建模上没有新的进展[7-8]。
非对称缸电液伺服系统分析和设计

有杆腔:
哈工大电液所 IEST Lihr@
15
15
10 p 1'
10
p1
P1(MPa)
5
P2(MPa)
P2' 5 P2 0
0
-5 -2
-1
0
1 F2
-1
0
1 FL(N)
2
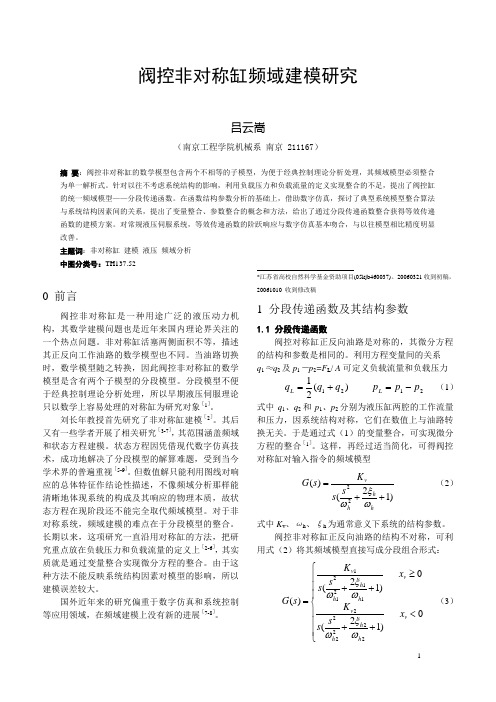
液压缸无杆腔的压力变化(m≠n)
3 4 x 10
液压缸有杆腔的压力变化(m≠n)
PS
防气蚀装置原理图
哈工大电液所 IEST Lihr@
9
2.4非对称阀控制非对称缸的压力特性 为了从根本上改善液压系统压力特性,建议采用非对称阀控制非对称缸 2.4.1阀与缸完全匹配的情况 阀的节流窗口面积梯度比与缸的面积比相等(m=n),这时两腔压力为
nps FL / A1 p1 p 1 n
p1气蚀条件 p1超压条件
n3 ( p1限制条件) 2 Ps A1 FL Ps A1 m m2 (1 n 2 ) Ps A1 FL Ps A1 (p2限制条件) n p 超压条件 p 气蚀条件
2 2
(活塞杆伸出)时, 当 xv 0 负载 FL 的变化范围限制在
p1' 气蚀条件 p1' 超压条件
C wx Q v 1 d 1 v A1 A1 C wx ( Ps P1 ) d 1 v A1 2 2m 2 ( Ps PL ) 3 2 (n m )
当活塞杆缩回(Xv <0),
Q1 C d w1 x v v A1 A1
C wx P1 d 1 v A1 2
哈工大电液所 IEST Lihr@
16
以对称阀控制非对称缸为例,其压力特性如图所示
阀控非对称缸位置系统的非线性建模_孙萌
1
1 1
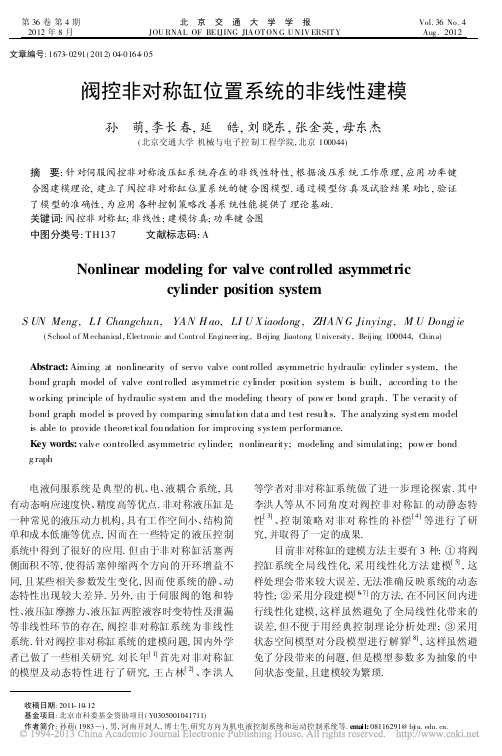
阀控非对称缸位置系统方程系统描述 阀控非源自称缸系统的主要部件包括 : 零开口四
边滑阀、 非对称液压缸及各种负载 . 其原理如图 1 所 示, 其中 1~ 4 为节流口 ; P S 与 P T 分别为供油压力 和回油压力 ; P 1 、 P 2 与 Q 1、 Q 2 分别为无杆 腔与有 杆腔的压力和流量; A 1 与 A 2 分别为无杆腔和有杆 腔的活塞有效面积 ; x v 为伺服阀阀芯位移 ; y 为液 压缸活塞位移; m 为活塞杆与负载总质量; K 为弹 性负载弹性系数 ; B c 为黏性负载阻尼系数 ; F ext 为液
式中 : y 为活塞 杆速 度, m/ s; y 为活 塞杆 加速 度,
图1 Fig 1
阀控非对称缸系统原理图 Principle diag ram o f serv o
v alve controlled asy mmetric cylinder
166 St ribeck 曲线描述, 即
北
京
交
通
大
2( P 1 - P T ) / , x v < 0 2( P 2 - P T ) / , x v
3
0
2( P S - P 2 ) / , x v < 0
式中 : Q 1 为 P 1 腔流 量, m / s; Q 2 为 P 2 腔流 量, m 3 / s; C d 为流量系数 ; w 为节流窗口面积梯度 , m; 为液体密度, kg/ m 3 ; x v 为阀芯位移 , m , 定义向右为 正方向 . 2) 液压缸连续性方程为 Q 1 - Q L, i = V 1 + V 1 dP 1 dt ( 2)
[ 2]
等学者对非对称缸系统做了进一步理论探索 . 其中 李洪人等从不 同角度对阀控非对称缸 的动静态特 性 、 控 制策略 对非对 称性的 补偿 究 , 并取得了一定的成果.
电液伺服系统的建模与控制

电液伺服系统的建模与控制1. 引言电液伺服系统是一种广泛应用于工业控制领域的系统,它可以通过控制液压执行器的输出来实现对机械运动的精确控制。
本文将介绍电液伺服系统的建模与控制方法,以帮助读者更好地了解和应用这一技术。
2. 电液伺服系统的概述电液伺服系统由液压执行器、电液伺服阀、传感器和控制器等组成。
液压执行器负责将液压能转化为机械能,电液伺服阀负责控制液压执行器的动作,传感器用于反馈系统状态信息,控制器根据传感器的反馈信息对电液伺服阀进行控制。
3. 电液伺服系统的建模建模是控制系统设计的第一步,对于电液伺服系统也是不可或缺的。
电液伺服系统的建模既可以基于理论模型,也可以基于实验数据进行。
3.1 理论模型在理论模型建模中,我们需要考虑液压执行器、电液伺服阀和控制器的动态特性。
液压执行器的动态特性可以用惯性、摩擦、密封等参数来描述。
电液伺服阀的动态特性可以用阀门的流量-压力特性和阀门饱和现象来描述。
控制器的动态特性通常可以用传统的PID控制算法进行建模。
3.2 实验模型在实验模型建模中,我们需要通过实验得到系统的频率响应和传递函数,并将其转化为数学模型。
这种方法对于实际系统的建模更加准确,但也需要大量的实验数据和较高的技术要求。
4. 电液伺服系统的控制控制是电液伺服系统中最关键的环节之一。
常用的电液伺服系统控制方法有位置控制、速度控制和力控制等。
4.1 位置控制位置控制是电液伺服系统中最基本的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的位置。
传感器将执行器的位置信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的位置跟踪。
4.2 速度控制速度控制是电液伺服系统中常用的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的速度。
传感器将执行器的速度信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的速度跟踪。
4.3 力控制力控制是电液伺服系统中一种高级的控制方法。
阀控非对称液压缸建模方法研究

PL F = =
=
P一 l
() 2
( )当活塞 反 向缩 回(< 0 时 , 2 y ) 负载 压 力 为
PL =A
,
=
A
,
= z 一 n
I
() 3 、
n=A: A。 液 压 缸 有 杆 腔 面 积 和 无 杆 腔 面 积 / 为
之 比。
阀控液压 缸系统 ,是工程上应用 比较广泛的传
动 和 动力 系 统 。其 中 , 阀控 对 称 缸 系统 与 阀控 非 对称 缸 相 比 , 有 很 好 的 控 制特 性 , 实 际 生 产 中得 到 了 具 在
F——活塞杆伸 出的外负载 , N; P、 2 — 液 压 缸无 杆 腔 、 杆 腔 的 有压 力 ,a l — P 有 P; ,、 — — 液 压 缸 无 杆 腔 、 杆 腔 的 有 效 工作 面 有
和 阀控 对 称 液 压 缸 的 数 学模 型 , 阀 控 缸 系统 的静 动 态 特 性 分 析 提 供 了理 论基 础 。 为
关键词 : 阀控非对称 液压缸 ; 负载压 力; 负载流 量 ; 学模 型 数 中图分类号 : H1 75 T 3 . 文献标识码 : A 文章编号 : 6 2 5 5 2 1 】3 0 0 — 4 1 7 — 4 X( 0 10 - 0 9 0
假定 : 阀与液 压 缸 的连 接 管 道 对称 且 短 而粗 , 管 道 中的 压力 损 失 和 管道 动 态 可 以忽 略 ;液压 缸 每 个 工 作 腔 内各 处 压 力 相等 ,油 温 和体 积 弹 性模 量 为 常 数 ; 压缸 内外 泄 漏均 为层 流 流动 。 液 () 1当活 塞正 向伸 出 (> 0 时 , y ) 流人 液 压缸 进 油
非对称伺服阀在阀控缸电液伺服系统中的应用

非对称伺服阀在阀控缸电液伺服系统中的应用摘要:非对称液压缸具有占用空间小、制造简单、成本低等优点,在液压系统中得到广泛应用。
但是,在液压伺服系统中,特别是在零开度伺服阀控制的阀控缸系统中,由于非对称液压缸活塞两侧的承载面积不同,当伺服阀芯在零开度附近摆动时,液压缸的两个腔室交替供油,活塞的运动方向交替变化。
此时液压缸的两个腔室会产生突然的压力跳变,导致系统振荡、爆炸,不仅影响系统的稳定性,还会导致系统无法正常工作,甚至导致液压。
在使用计算机仿真设计液压系统时,这个问题很容易被忽略,导致设计失败。
关键词:伺服阀;不对称液压缸;三通阀;分析一个实际零开口对称伺服阀控不对称液压缸的液压系统设计案例,对对称阀控制不对称液压缸进行了不相容性分析,明确系统产生“爆振”的原因,以及提出该设计失败后的改进方案。
一、对称四通伺服阀控制不对称液压缸可行性1.对称四通伺服阀控制不对称液压缸方程推导。
对称四通伺服阀控制不对称液压缸如图1所示。
图1对称四通伺服阀控制不对称液压缸图1中,L1、A1为液压缸无杆腔行程和有效工作面积;L2、A2为液压缸有杆腔行程和有效工作面积;V1、V2分别为液压缸无杆腔和有杆腔容积;p1、p2分别为液压缸无杆腔和有杆腔压力;vp1、vp2分别为活塞杆伸出与退回速度;∑F1、∑F2分别为活塞杆伸出时负载和退回时负载;q1、q2分别为液压缸无杆腔流量和有杆腔流量;q3为活塞杆外伸时伺服阀的回油流量;q4为活塞杆退回时伺服阀的回油流量;a1、a2、a3、a4为四通伺服阀各节流口的通流截面积;xp为液压缸活塞的位移;mt为活塞及其刚性联接件、油液及负载等效到活塞上的总质量;BP为活塞和负载的黏性阻尼系数;ps为四通伺服阀进油压力;xv为四通伺服阀阀芯位移。
当四通伺服阀为对称零开口阀时,为简化分析,不考虑油液的可压缩性和液压缸的泄漏,假设∑F为液压缸活塞上的总负载,FL为外负载,FC为摩擦力。
2.仿真设计的误区。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
流 口均 是匹配 和对 称的 ;
()由于 阀腔 的容积 很 小,不 考虑液 体 2 在 阀腔里 的压 缩性 ;
() 3 阀具 有理 想 的响应 能 力 ,即 阀芯位 移和 负载变 化 能立 即引起 流量 的相应变 化 ;
等 ,油温恒 定 ,体积 弹性 模 量为 常数 ;
() 乐 缸 内、外泄 露均 为 层流流 动 。 7液
阀控 缸 电液 伺 服 系 统 包括 液 压 动 力单
图 21对 称 四通 阀控 制 非对 称液 压缸 原理 图 .
( 1 阀为理 想 的零 开 口四通 阀 ,四个节
粗 , 管 道 中 的 力损 失和 管 道 动 态可 以忽 略; () 压 缸 每 个 工 作 腔 内各 处 压 力 相 6液
— —
计 。故上 式可 简化 为
7 7 : A (. 16)
定义 负载 流量 为 P ,则 有
PE A^ = Pl A^一 P2 A ( .) 17
—
—
,
,
将 式 ( .)代入 得 1 6
P = P。 2 一 (. 18)
由式 ( .)和 式 ( .)求得 1 6 18
引 言
非对 称液 压缸 具有 工作 空问小 、 结构简 单和成 本低廉 等优 点 , 冶金机 械 , 山机 在 矿 械, 工程机 械等 工程 领域 的液压伺 服 系统 中 有相 当广 泛 的应用Hl 由 非对称 液 压缸 i 。 j 在 正反两 个方 j 甸运动 时作 用面积 不 同, 致 导 负载 流量 和负载 压力 不等 ,阕此 ,阀控 非对 称 液压 缸 伺服 系 统 的 数 学 函数 不 能简 单地 描述 为活塞 位移 方 向上 的变 化 , 活塞 正反 方 向运 动 的 数学 表 达 式 也存 在 着本 质 的 区别
在 图 1中 ,设活 塞 向右运 动时位 移 为
正 , 即 >0。
() 油 压 力 P 恒 定不 变 , 回油 压 力 4供
P 为零 ; , () 5 阀与 液压 缸 的连接 管道 对 称且短 而
根据 节流 公式 , 服 阀左右 两 腔控 制油 伺
口的 流 量 分 别 为
ql c :
q£= K 一 K 。 X P£ ( .3) 11
2
‘
x —— 活 塞 位移 , m 液 压 缸进 油腔 的容积 ( 括 包 阀 、连 接 管道 和进 油 腔 ) m , 液 压 缸 同油腔 的容 积 ( 包括 阀、连 接 管道 和 同油腔 ) m , 有 效 体 积弹 性 模 量 ( 括 汕 包 液 、连 接 管道 和缸 体 的机 械 柔度 ) JC , pt 由式 ( .)~ 式 ( .)可求 出无 杆腔 和 有 11 1 4 杆 腔 的流 量 比 ,, 即 7
/ P) ・
C — — 液 压 缸 外 泄 露 系 数 ,
m 。
・
将 式 ( .)和 式 ( .1 】 9 11 )代入式 ( .) 11 推 导 出伺 服 阀的 负载 流晕 为
g= x『p p ) cWv2 1 ( 【  ̄ l + - 7 ) 7
t ,
・ 2
对称 阀控制非对称缸 电液 伺服 系统建模 分析
吴 远 会
摘 要 :针 对 阀控非对 称缸 正反 油路上 结构参 数不 同的特征 ,定义 了 负载 流量 和 负载 力 , 分别 建立 正反油 路上 的传 递 函数 ,以惯 性 力为 主导作 用 的实 际应 用为依 据 ,推 导 出对称 阀 控制 非对称 缸 电液伺服 系统 的传递 函数 。
【【 34 】1
。
元 , 服 阀单兀 , 伺 倒服 放人 器 单元和 传感 器 单元 四个 部分 。 文抓 住活 塞腔 与杆 腔作 用 本 面积 不等 同 的关 系 ,定义 了面 积 比,从而 大 大简化 了数学 函数 的表达 式L。 虑 到实 际 5考 J 应 用 中惯 性力 为主 导作用 的特 点 , 一般 性 从
/p p 1) 三 , ・ (一 )(1
r ~ =
实际应 用 中 ,内泄露 系 数 C 和 外泄 露 系数 c 通 常 很 小 ,有 效 体 积 弹 性模 量
很 人 , 以 由泄漏 及 容积 效应 所 弓 起 的流 量 所 l 远 小于 活 塞运 动所 需 的流 晕 , 町以忽 略 不