线性系统理论(复习)(精选)
线性系统理论复习题纲
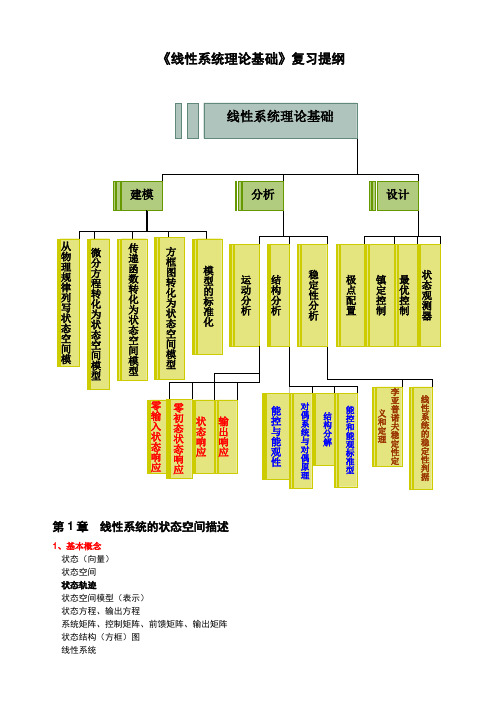
《线性系统理论基础》复习提纲第1章线性系统的状态空间描述1、基本概念状态(向量)状态空间状态轨迹状态空间模型(表示)状态方程、输出方程系统矩阵、控制矩阵、前馈矩阵、输出矩阵状态结构(方框)图线性系统时不变(定常)系统、时变系统连续时间系统、离散时间系统 状态线性变换矩阵的特征值、矩阵的特征向量 对角线标准型、约当标准型 模态标准型 正则型矩阵 范德蒙矩阵 传递函数矩阵2、知识要点%%知识点1:根据物理规律建立状态空间模型♦ 简单机械系统 ♦简单电气系统参考例题:例2.1.1,例2.1.2(P8)%%知识点2:微分方程模型转化为状态空间模型♦微分方程中不含输入导数项给定 ()(1)110n n n y a ya y a y bu --++++=&L ,选取状态向量12(1)n n x y x y x y -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦&M M , 则有状态方程: 1122011010010n n n x x x x u x a a a x b -⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦&&M O M M M&L输出方程: []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n x x x y M Λ21001 例2.1.3 (注意:方框图在没有要求时可以不画出) ♦微分方程中包含输入函数导数项,且m n <给定()(1)()(1)110110n n m m n m m ya y a y a yb u b u b u b u ----++++=++++&&L L ,m n <,将其转化为()(1)110()(1)110n n n m m m m y a y a y a y u y b yb y b y b y ----⎧++++=⎪⎨=++++⎪⎩&%%%%L &%%%%L ,选取状态向量12(1)n n x yx y x y-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦%&%M M %,则有状态方程 120110100101n n x x u x a a a -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦&&M O M M &L 输出方程 12011[,,,,0,,0]m n m n x x y b b b x --⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦L L 123M例2.1.4 ♦ 微分方程中包含输入函数导数项,且n m =若()(1)()(1)110110n n n n n n n ya y a y a yb u b u b u b u ----++++=++++&&L L ,让n y y b u =-%,则转化为如下微分方程的形式()(1)(1)(1)110111100()()()n n n n n n n n n y a y a y a y b a b u b a b u b a b u -----++++=-++-+-%%%%&L L 。
线性系统复习

k1
y(k) CAk x0 C Ak j1Bu( j)
0
j0
CeAtx0 h(t)*u(t)
CAk x0 h(k)*u(k)
h (t )DCe At B
h(k )DCA k 1B
传递函 数阵
H ( s) C ( sI A) 1 B
H ( z ) C ( zI A)1 B
u(k) u(t)
u (t) u (k) k T t (k 1)T y(k)
u(t)
u(k) 保持器 u(t) x Ax Bu
y Cx Du y(u)
x(k1)G(xk)H(uk) y(k)C(xk)D(uk)
{x Ax Bu
定1.理 给定线性y 定 Cx D常 u x系 0)(x统 0 (1
2 ,G
e At
1
0
0.5(
1-e-2T ) e-2T
1 0
0.091
0.819
H (
T e At dt)B
T 1
0
0 0
0.5(
1-e-2t ) e-2t
dt
×10
0.5T 0.25e-2T -0.5e-2T 0.5
Bu (k )
(k
)
(1)
已知 x(k 0 ), 及 u(k) k k 0
k 1
x(k) A k-k 0 x(k 0 )
A k-i- 1 Bu(i)
i k0
若令 k 0 0 , 则有 :
k 1
x(k) A k x( 0 )
A k-i- 1 Bu(i)
总复习(信号与线性系统必过知识点)

目录
• 信号与系统基本概念 • 线性时不变系统 • 信号的变换 • 系统的变换 • 信号与系统的应用
01 信号与系统基本概念
信号的描述与分类
信号的描述
信号是信息的载体,可以通过时间或空间的变化来传递信息 。信号的描述包括信号的幅度、频率、相位等特征。
信号的分类
拉普拉斯变换
拉普拉斯变换的定义
将一个信号从时域转换到复频域的过 程,通过将信号表示为无穷积分的形 式来实现。
拉普拉斯变换的性质
拉普拉斯变换的应用
在控制系统分析、电路分析等领域有 广泛应用,如系统稳定性分析、传递 函数求解等。
包括线性性、时移性、复频域平移性、 收敛性等。
Z变换
Z变换的定义
01
将一个序列信号从时域转换到复平面的过程,通过将信号表示
因果性
线性时不变系统的输出仅与当 前和过去的输入有关,而与未 来的输入无关。
稳定性
如果系统对所有非零输入信号 的响应最终都趋于零,则称该
系统是稳定的。
线性时不变系统的分析方法
01
02
03
频域分析法
通过傅里叶变换将时域信 号转换为频域信号,然后 分析系统的频率响应。
时域分析法
通过求解差分方程或常微 分方程来分析系统的动态 行为。
系统分析方法
系统分析是对系统进行建模、分析和综合的方法。常用的系统分析方法包括传递 函数分析、状态方程分析、根轨迹分析等。
02 线性时不变系统
线性时不变系统的性质
线性性
线性时不变系统对输入信号的 响应与输入信号的强度无关,
只与输入信号的形状有关。
时不变性
线性时不变系统的特性不随时 间变化,即系统对输入信号的 响应不会因为时间的推移而改 变。
线性系统复习

完全能观V对连续时间线性时变系统和指定初始时刻九匚£如果存在一个时刻輕几f"*使系统以A W F为初始状态的输HVW恒为零,即HCmtreivj.则称非零状态「切在时刻如为不能观测;如果状态空闻中所有非塞状态在时刻f松都不为不能观测,则称系统在时刻如为完全能观瀝,不完全能观一致完全能观r如果系统对任意时刻均为完全能观測,即能观测性与初始时刻如的选取无关・则称系统为救S全能观测.完全能控判据对H维连续时间线性时不变系统,系统完全能控的充分必要条件为能控性判别矩阵S松=[5 AE,才鱼…才T R满秩,即ranliQ=ftn维连续时间线性时不变系统完全能控的充分必要条件为:rank{Sf-A / Vs€ C或TOM耳人r-坨月]="&为系统特征值能控性指数令Q& =2炯…屮5对完全能控连续时间线性时不变系统,定义能控性指数为:"=使/71戚0=丹成立的最小正整数h完全能观判据对科维连续时间线性时不变系统,系统完全能观测的充分必要条件为能观测性判别矩阵CCA满秩,即fank Qf,=rt歼维连续时间线性时不变系统完全能观测的充分必要条件;Sf-ACrank=/?V5E C或rank 人/一川C ZMy…4,为系统特征值= A(t)X + 5® Y 二 c(t)XI 屮r = —/厂⑴屮卩+ C 丁⑴/b =£「(f)屮 rP = \b Ab A^b …才比]能观性指数 宦义:令西=cCA完全能观测胖堆连续時间线性时不变系统的能观测性指数 定义为訂使"皿必0=/|"成立的最小正整数4离散系统能控 结论4 H 维离散时间线性时不变系统X 茁十1} = GVW 十切 系统完全能达的充分必要条件为矩阵久“乩他…”切馬秩 离散系统能观 结论8 «维离散时间线性时不变系统完全能观测的充分必要 条件为Q"* =c ' CG cc*-'对偶系统满秩能控标准型 比—|W6=严%©=eP兀=PrcinkQ^=r<n^尸1=尸=[如,血…4「丨Oz …,qJ于是可得能控子系统动态方程V = 4 rV 十岀沙厂十和 ”=百*不能控子系统动态方程丘点-兀2丫己Xl — C 2七zrank 0。
线性系统理论第一章

第一章线性定常系统的状态空间描述及运动分析1.1 线性定常系统的传递函数描述传递函数描述局部的,有局限性的描述传递函数描述的是系统的输入--输出关系,即假定对系统结构的内部信息一无所知,只能得到系统的输入信息和输出信息,系统内部结构就像一个"黑箱"一样,因此,传递函数只能刻画系统的输入--输出特性,它被称为系统的输入--输出描述和外部描述.常用的数学工具:拉普拉斯变换主要适用于描述线性定常系统1.单变量情形回顾已知由下列常系数微分方程描述的定常系统其中 : 系统的输出 ; :系统的输入; : 时间; 均为常数 ,(希望input少,收益大)假定所有初始值(包括导数的值)全为0,对上式两边取拉普拉斯变换,得到其中为的拉普拉斯变换,则下式称为系统的传递函数 :传递函数为的真有理分式,则称系统为物理能实现的. 单输入--单输出系统的传递函数必为真有理分式.系统的特征多项式: 多项式系统的特征方程 : 代数方程系统的极点 : 特征方程的根或者说特征方程的零点系统的零点 : 多项式的零点传递函数的零点和极点 : 零极相消后剩下的系统的零点和极点 (若系统有相同的零点和极点,则称系统有零极点相消)2.传递函数矩阵考察多输入--多输出的线性定常系统.令输入变量组 : {} , 输出变量组 : {} 且假定系统的初始变量为 0 .用和分别表示和的拉普拉斯变换, 表示系统的由第个输入端到第个输出端的传递函数,其中则由系统的线性属性(即满足叠加原理) 可以导出:称由上式所定义的为系统的传递函数矩阵. 容易看出, 为的一个有理分式矩阵. 当的元传递函数除严格真还包含真有理分式时,即它的一个或一些元传递函数中分母和分子多项式具有相等的最高幂次时,称为真有理分式矩阵.通常,当且仅当为真的或严格真的时,它才是物理上可实现的.作为一个判别准则,当且仅当零阵时, 为严格真的;非零常阵传递函数矩阵为真的.1.2 线性定常系统的状态空间描述1. 状态和状态空间定义1.1 动力学系统的状态定义为完全的表征系统时间域行为的一个最小内部变量组.组成这个变量组的变量称为系统的状态变量,其中为初始时刻由初始变量构成的列向量称为系统的状态向量,简称为状态.状态空间则定义为状态向量取值的一个向量空间.几点解释:1. 状态向量组可完全的表征系统行为的属性.2. 状态变量组的最小性.3. 状态变量组在数学上的特征.4. 状态变量组包含了系统的物理特征.5. 状态变量组选取上的不唯一性定理1.1 系统任意选取的两个状态变量组之间为线性非奇异的关系2.动态系统的状态空间描述和输入--输出描述不同,状态空间描述中把系统动态过程的描述考虑为一个更加细致的过程,输入引起系统状态的变化,而状态和输入则决定了输出的变化."输入"引起"状态"的变化 ( 一个运动的过程)数学上必须采用微分方程或差分方程来表征并且称这个数学方程为系统的状态方程考虑最为一般的连续动态过程: (一个一阶非线性时变微分方程组)进而,在引入向量表示的基础上,还可将状态方程简洁的表示为向量方程的形式:其中"状态"和"输入"决定"输出"的变化 (一个变量见的转换过程)描述这种转换过程的数学表达式为变换方程,并且称之为系统的输出方程或量测方程.最一般的,一个连续的动力学系统的输出方程具有以下形式:表示为向量方程的形式为其中系统的状态空间描述由状态方程和输出方程组成.离散动态过程(离散系统)的状态空间的描述: 只在离散时刻取值,用来表示其状态空间过程描述只反映离散时刻的变量组间的因果关系和转换关系.通常,可采用两条可能的途径来组成系统的状态空间描述:一是分析途径,适用于结构和参数已知的系统;二是辨识的途径,适用于结构和参数难于搞清楚的系统.3.线性定常系统的状态空间描述限于考虑线性定常系统的连续动态过程,此时,向量函数将都具有线性的关系,且不显含时间 .从而线性定常系统的状态空间描述的表达式为其中维状态向量维控制输入向量维输出向量系统矩阵输入矩阵输出矩阵前馈矩阵以上统称为系统的系数矩阵,均为实常阵.线性定常系统也叫做线性时不变系统(linear time-invariant L TI),完全由系数矩阵决定.简记为.对于线性定常系统,我们分别称系统矩阵的特征值,特征向量,若尔当标准型,特征方程,特征多项式为系统的特征值,特征向量,若尔当标准型,特征方程,特征多项式,系统的特征值也称作系统的极点.若,则此系统为单输入线性定常系统;若,此系统为单输出线性定常系统;若,此系统为单输入--单输出系统,或单变量系统.考虑线性定常离散系统的状态空间描述,其一般形式为其中维状态向量维控制输入向量维输出向量阶实常系数矩阵简记为1.3 输入输出描述导出状态空间描述------------- 系统的实现问题(第五章详解)考虑单输入--单输出线性定常系统.表征此系统动态过程的输入-输出描述,时域为或等价的频域描述即传递函数其中和分别表示和的拉普拉斯变换对于由上式描述的系统,可以引进状态变量 ,将其写成状态空间描述形式,其中为维状态变量分别为的常矩阵由"上"写成"下",称为实现问题,实现不具有唯一性1. 当时,有如下结论:定理1.2 给定单输入--单输出线性定常系统的输入输出描述如"上",当时,其对应的一个状态空间描述为:2. 当时,已知"上"求其状态空间描述.先求极限然后令为严格真,直接按的形式写出即可.3. 当时, 此时输入输出关系为此时状态空间描述形式为:1.4 由状态空间描述导出的传递函数矩阵对于多输入--多输出线性定常系统,传递函数矩阵是表征系统输入输出特性的最基本的形式.1. 传递函数矩阵的表示的基本表达式定理1.3 对应于状态空间描述的传递函数矩阵为并且 ,当时, 为真的 , 时, 为严格真的,且有2.的实用关系式有给出的关系式在理论分析上很重要,但从计算的角度而言不方便,下面给出由计算的两个实用算式.定理1.4 给定状态空间描述的系数矩阵 , 求出则相应的传递函数矩阵可表示为注: 的根 : 系统的极点 ; 分子的根 : 系统的零点推论1.1 若的最小多项式为则系统的传递函数矩阵可表示为2. 脉冲响应矩阵和状态空间描述定理1.11 线性定常系统其中的实常阵的脉冲响应矩阵为将其写作更为常用的形式定理1.12 两个代数等价的线性定常系统具有相同的脉冲响应矩阵.定理1.13 两个代数等价的线性定常系统具有相同的输出零状态响应和输出零输入响应.3. 脉冲响应矩阵和传递函数矩阵定理1.14 分别表示线性定常系统的脉冲响应矩阵和传递函数矩阵,则有推论1.2 给定两个线性定常系统 ,设两者都具有相同的输入和输出维数,状态维数不一定相同,则两系统具有相同的脉冲响应矩阵(即相同的传递函数矩阵)的充要条件为1.8 线性定常离散系统的运动分析归结为对定常的线性差分方程进行求解.1. 线性定常离散系统的运动规律对于上述系统,其状态运动的表达式为或2. 脉冲传递函数矩阵取初始状态 , 则可得到系统的输入输出关系式为其中为线性定常离散系统的传递函数矩阵, 按习惯称为脉冲传递函数矩阵.G(z) 为 z 的有理分式矩阵,通常只讨论其为真的或严格真的情况,此时 G(z) 为物理可实现的. 1.9 线性定常系统的时间离散化1. 问题的提出把连续时间系统化为等价的离散时间系统的问题. (课本P22 或百度文库)2.线性定常系统按采样周期T的离散化线性定常系统引入三点基本假设,以保证系统离散化后的描述简单,且是可复原的1. 采样器的采样方式取为以常数 T 为周期的等间隔采样. 采样瞬时为2. 保持器为零阶的.3. 采样周期的值要满足香农(Shannon)采样定理所给出的条件香农定理:离散信号可以完满地复原为原来的连续信号的条件为采样频率满足.考虑到 , 故上式可化为定理1.15 上述系统的时间离散化模型为其中注 :定理1.15提供了线性定常连续系统时间离散化的算法, 离散化系统仍为定常系统.不管A是否奇异,离散化后系统矩阵G一定是非奇异的.。
线性系统 复习

5)坐标缩放性质(定标性质)—The scaling property
若: g(x) f (x) h(x)
6) 函数的卷积性质
则: f (ax) h(ax) 1 g(ax) a
f (x) (x) f ( ) (x )d f ( ) ( x)d f (x)
f (x) (x x0 ) f (x x0 )
2j
f0 ) (u
f0 )]
9.圆函数的FT
1 , r a
f
(r)
circ(
r a
)
1/ 2 0 ,
, r
r
a
a
1, r 1 f (r) circ(r) 1/ 2 , r 1
0 , r 1
FT[circ( r )] 2 a2 J1( 2a)
a
2a
FT[circ(r)] 2 J1( 2) 2
(a
2 f0 j2 u)2 (2
f0 )2
5).平移性:
若: F(u, v) FT[ f (x, y)]
则:
FT[ f (x x0, y y0 )] exp[ j2 (ux0 vy0 )]F (u, v)
❖空域中的平移造成频域中频谱的相移。
❖光场复振幅不具有平移不变性。但强度具有平移不性。
0
1.2-3.3 FT存在及应用条件(Requirements)
1.2-3.4 广义FT (极限意义下的FT,及δ函数的FT)
lim 1. 极限意义下的FT f (x)
gn ( x)
n
FT f (x) limFT gn(x) limGn(u)
n
n
FT
[sgn(
j
u
x)]
lim
信号与线性系统知识点总复习
信号与线性系统知识点总复习1.信号的基本概念信号是电子信息工程中的重要概念,简单来说就是随时间(或空间)变化的物理现象。
信号可以分为连续信号和离散信号两种。
连续信号可以用函数表示,离散信号可以用数列表示。
2.常见信号的分类常见的信号类型包括连续时间信号、离散时间信号、周期信号、非周期信号、奇函数信号、偶函数信号等。
不同类型的信号在数学表示和性质上有所差异。
3.连续时间信号的基本性质连续时间信号可以通过振幅、频率、相位等参数来描述。
它们具有线性性质、时移性、尺度变换性质和时间反转性质。
这些性质对于信号的分析和处理都是重要的基础。
4.离散时间信号的基本性质离散时间信号是在离散时间点上取值的信号,通常用数列表示。
离散时间信号具有线性性质、时移性、尺度变换性质和时间反转性质。
此外,离散时间信号还有抽样定理、离散时间傅立叶变换等重要概念。
5.线性系统的基本概念线性系统是输入和输出之间存在线性关系的系统,可以用线性常微分方程或差分方程表示。
线性系统具有叠加原理、时不变性、因果性等基本特性。
线性系统的频率响应是分析系统特性的重要工具。
6.线性时不变系统的冲激响应冲激响应是线性时不变系统的重要性质,它描述了系统对单位冲激输入的响应。
从冲激响应可以得到系统的频率响应、相位响应等信息。
7.线性时不变系统的频率响应频率响应描述了线性时不变系统对不同频率的输入信号的响应特性。
它可以通过线性时不变系统的冲激响应来计算,常用的方法有离散时间傅立叶变换、连续时间傅立叶变换、z变换等。
8.线性系统的稳定性分析稳定性是线性系统分析中的重要性质。
对于连续时间系统,稳定性可以通过系统的传递函数的极点位置来判断。
对于离散时间系统,稳定性可以通过系统的差分方程的极点位置来判断。
9.线性系统的频域分析频域分析是信号与系统分析中的重要方法,可以通过傅立叶变换、拉普拉斯变换和z变换等来将信号从时域转换到频域。
频域分析可以得到信号的频谱特性、频率响应等信息。
线性系统理论(2013.7.26)
定义 Φ(t ) e At L1[(sI A)1 ] 为系统状态转移矩阵
解状态方程的关键——求状态转移矩阵 。
13
已知状态方程及初始条件:x1(0)=1,x2(0)=0,求解该齐次方程。
1 0 x x 1 1
解:
(sI A)-1
1 s 1 0 (s - 1)2 1 s - 1
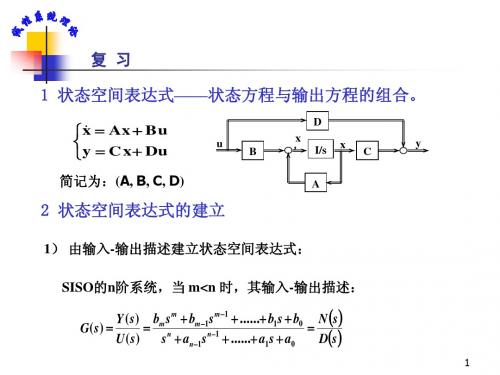
系统结构图:
U1(s) G1/s 11(s) Y1(s)
0 G21(s)
1/s(s+2) G12(s)
U2(s)
1 y1 s y 2 0
1 s( s 2) u1 1 u2 s2
1/(s+2) G22(s)
y c1m c1,m 1 c12 c11 X
2) 由系统结构图建立状态空间表达式
4
例 系统如图,试建立起状态空间表达式。 u
—
k x3 1 x2 1 s1 s2 s
x1
yHale Waihona Puke 解:由结构图X 1 ( s) 1 X 2 ( s) s
x1 x2
X 2 ( s) 1 X 3 ( s) s 2
y x1
5
5 矩阵的特征方程、特征值
1)方阵A的特征方程与特征值 设A 为n×n的方阵,如有一未知量λ ,则: 0 a11 a12 ... a1n a11 a12 a 21 a22 ... a 2 n a21 a 22 I A ... ... ... ... ... ... an1 an 2 ... ann an1 a n 2 0