simulink齿轮扭转动力学
二自由度动力学模型 simulink

二自由度动力学模型Simulink如下:
建立模型。
利用Simulink对车辆的两自由度单轨模型进行操纵响应和稳定性分析,最后进行简单的四轮转向控制器(4WS)设计。
建模思想。
确定状态变量,围绕状态变量展开。
从上述的线性二自由度方程看,β、v'、ω都是变量,但是系统的阶数是2阶,状态变量个数=系统总阶数,从前面的推导可知,侧向速度v和质心侧偏角有一定的关系,即tanβ = v/u,而质心侧偏角很小,所以做出tanβ = β的近似处理,所以即β = v/u(注:这里u是匀速,也就是说纵向速读u是常量),求导所以β' = v'/u,这样状态变量可以有两种形式的选择,即选择v、ω或者β、ω为状态变量。
风机齿轮箱非线性动力学建模研究
风机齿轮箱非线性动力学建模研究摘要:为了能够建立贴近实际齿轮箱振动特点的模型,该文通过齿轮-轴-轴承非线性动力学的研究,利用simulink仿真建立了齿轮传动过程中振动的模型。
该模型包括了常见的齿轮及轴承故障,对于研究故障的产生发展机理有着重要作用,其在工程应用中的意义重大。
关键词:非线性动力学仿真可靠性分析基于振动与齿轮机构故障的密切关系,为此建立了一风机齿轮箱的非线性动力学模型[1],利用simulink对建立的模型进行了仿真[2]。
为此后的故障研究以及系统特性分析提供一个广泛实验的平台。
1 齿轮箱模型振动分析与模型建立齿轮箱振动复杂,且轮齿的啮合导致出现振动耦合的现象,因此在建完模型以后还要对关心的振动进行解耦。
同时各种非线性因素的引入会使方程组可能无法解析,因此采用数值仿真的方法。
以高速轴与中间轴组成的轴系为对象建模。
建立输出轴轴承的几何中心为总坐标原点的坐标系,建立以各轴的轴承几何中心为坐标原点的浮动坐标系,在建立齿轮扭转振动模型时以主动齿轮几何中心为坐标原点、建立次级浮动坐标系。
、是、相对于原点的向量,是相对于的向量[1]。
1.1齿轮综合扭转动力学模型在以齿轮的几何中心为原点建立的动力学模型:1.2 轴系的有限元动力学模型对轴进行有限元建模时,考虑到轴与齿轮单元的不同。
所以将轴段划分为盘和轴段单元,通过拉格朗日方程分别可求得轴上各段的质量阵、刚度阵如下。
2 模型的仿真与可靠性分析根据以上建立的动力学模型,利用simulink对所建立的模型搭建仿真器。
由此仿真器来获取齿轮箱输出端上的仿真加速度信号。
2.1 单元划分模型当中不同的参数单元有不同的质量、刚度矩阵。
因此选择中间轴和高速轴组成的轴系来进行仿真。
划分高速轴为7段中间轴为5段从左到右依次各段参数以及啮合齿对参数如表1所示:2.2 振动仿真(1)对以上所给参数搭建仿真器首先对节点进行处理。
针对节点的建模工作量会很大,因此可以同过建立其各节点的封装模块的方法减少计算机的额外计算,从而提高运算的效率。
matlab simulink 动力学问题

matlab simulink 动力学问题动力学问题是指研究物体运动、运动规律和动力学关系等方面的问题。
在工程领域中,动力学问题广泛运用于机械设计、控制系统设计、车辆动力学、机器人运动控制等方面。
Matlab Simulink是一款基于图形模型的设计与仿真环境,可以用于解决动力学问题。
Simulink提供了一种直观的、图形化的方式,允许用户将复杂的系统划分为多个模块,并通过信号连接这些模块,从而构建整个系统的模型。
用户可以在模型中定义系统的数学公式、边界条件、初始条件等,并基于这些模型进行仿真、分析和优化。
在动力学问题中,常常用到的公式包括牛顿第二定律、动量定理、角动量定理、能量守恒定律等。
以机械系统为例,当我们考虑一个物体受到外力作用时的运动情况时,可以利用牛顿第二定律来描述物体的运动规律。
根据牛顿第二定律,物体受力的大小与所受的加速度成正比,反方向与加速度相同。
因此,在Matlab Simulink中,我们可以通过建立物体的模型,在模型中加入受力的作用,并通过求解运动方程来得到物体的运动状态。
例如,考虑一个简单的弹簧振子系统,该系统由一个质量为m的物体和一个弹簧组成。
弹簧的劲度系数为k,物体受到地球引力的作用。
我们可以建立如下的模型来描述该系统的动力学问题:-建立物体的动力学方程:F = m*a,其中a表示物体的加速度,F表示作用在物体上的合力。
合力包括地球引力和弹簧的作用力,分别由mg和-kx表示,其中g表示地球的重力加速度,x表示弹簧的位移量。
-通过求解动力学方程,可以得到物体的加速度,进而得到物体的速度和位移。
在Simulink中,我们可以通过建立一个模块化的系统模型,将这些步骤一一对应地实现。
具体步骤如下:1.在Simulink中创建一个新模型。
2.在模型中添加一个纵向布局的框架,用于容纳其他模块。
3.添加一个输入信号,用于控制模型的运行时间。
4.添加一个数学运算模块,用于计算物体受力大小。
有效利用Simulink中的SimDriveline
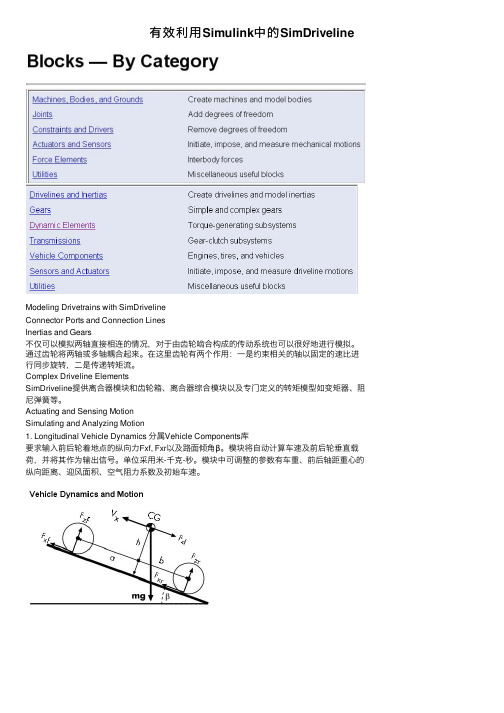
有效利⽤Simulink中的SimDrivelineModeling Drivetrains with SimDrivelineConnector Ports and Connection LinesInertias and Gears不仅可以模拟两轴直接相连的情况,对于由齿轮啮合构成的传动系统也可以很好地进⾏模拟。
通过齿轮将两轴或多轴耦合起来。
在这⾥齿轮有两个作⽤:⼀是约束相关的轴以固定的速⽐进⾏同步旋转,⼆是传递转矩流。
Complex Driveline ElementsSimDriveline提供离合器模块和齿轮箱、离合器综合模块以及专门定义的转矩模型如变矩器、阻尼弹簧等。
Actuating and Sensing MotionSimulating and Analyzing Motion1. Longitudinal Vehicle Dynamics 分属Vehicle Components库要求输⼊前后轮着地点的纵向⼒Fxf, Fxr以及路⾯倾⾓β。
模块将⾃动计算车速及前后轮垂直载荷,并将其作为输出信号。
单位采⽤⽶-千克-秒。
模块中可调整的参数有车重、前后轴距重⼼的纵向距离、迎风⾯积、空⽓阻⼒系数及初始车速。
2. Torque Converter 分属Dynamic Elements库液⼒变矩器模型通过粘性流体的液⼒学运动耦合两个传动轴以传递动⼒及运动。
功率流通过I⼝流进模型,通过T⼝流出模型,I⼝通常代表叶轮或泵,T⼝代表涡轮。
前进流指从I⼝到T⼝,逆流指从T⼝到I⼝。
前进运动代表两轴相对⾓速度ω=ωT–ωI>0。
由于两轴的耦合通过粘性作⽤发⽣,因此传递的转矩则由这个相对⾓速度ω,即两轴⾓速度差决定。
正常情况下,ω是⼩于0的,代表输出T轴不会真正达到I轴的转速。
Ω的绝对值越⼤,转矩传递能⼒越强。
因为ω不可能真正到达0,所以变矩器或多或少要传递些扭矩。
模块中需要输⼊的有转矩⽐和承载因⼦,它们作为转速⽐的离散函数,因为它们要以向量的形式给出。
基于MatlabSimulink的四轮转向汽车操纵动力学仿真分析资料
武汉理工大学课程论文基于Matlab/Simulink的四轮转向汽车操纵动力学仿真分析课程:汽车动力学学院(系):汽车工程学院专业班级:汽研学号:学生姓名:任课教师:乔维高基于Matlab/Simulink 的四轮转向汽车操纵动力学仿真分析摘要:本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行仿真分析,结果表明四轮转向汽车的操纵性能要优于前轮转向汽车。
关键词:汽车,四轮转向,操纵动力学,仿真分析Simulation for the Handling Dynamics of Four-wheelSteering Vehicle Based on Matlab/SimulinkAbstract: In this paper, the motion characteristics of four-wheel steering (4WS)vehicle are analyzed. The three degrees of freedom simulation analysis of four-wheel steering vehicle dynamics model is established. The simulation for the handling dynamics of four-wheel steering vehicle based on Matlab / Simulink is done, and the results show that the handling performance of four-wheel steering vehicle is better than the front wheel steering vehicle.Key words: vehicle, four-wheel steering, handling dynamics, simulation 1 引言早期的汽车均采用前轮转向方式,但传统的前轮转向汽车具有低速时有低速时转向响应慢,回转半径大,转向不灵活;高速时方向稳定性差等缺点。
simulink最简单动力学模型
simulink最简单动力学模型Simulink是一款功能强大的仿真软件,用于建立和模拟各种系统的动力学模型。
在这里,我将为您提供一个简单的Simulink动力学模型,并解释每个组成部分的作用。
在这个例子中,我们将构建一个简单的质点模型。
质点将受到一个恒定的外力作用,我们将观察其加速度和速度的变化。
首先,打开Simulink并创建一个新的模型。
然后,按照以下步骤进行操作:步骤1:添加输入信号在模型中添加一个"Constant"模块,它将作为外力的输入信号。
右键单击模型编辑器中的空白区域,选择"Simulink Library Browser"。
在库浏览器中,选择"Sources"类别,并将"Constant"模块拖放到模型中。
步骤2:添加质点模型在模型中添加一个"Transfer Fcn"模块,它将表示质点的动力学行为。
从库浏览器中选择"Continuous"类别,并将"Transfer Fcn"模块拖放到模型中。
步骤3:连接输入和输出将"Constant"模块的输出端口连接到"Transfer Fcn"模块的输入端口。
为此,点击"Constant"模块的输出端口,然后拖动鼠标到"Transfer Fcn"模块的输入端口,并释放鼠标按钮。
步骤4:设置参数右键单击"Transfer Fcn"模块,选择"Block Parameters"。
在弹出的对话框中,设置传递函数的系数,以控制质点模型的动力学行为。
例如,您可以设置一个简单的一阶传递函数:Numerator coefficients: [1]Denominator coefficients: [1 1]这将创建一个一阶传递函数H(s) = 1 / (s + 1),其中s是Laplace 变量。
基于Simulink的混合动力车型动力经济性仿真模型
CW+375 物理参数
新能源车型适用
CW+375 物理参数
新能源车型适用
CW+100 滑行法
混合动力车型适用
CW+100 滑行法 包含发动机的车型适用
CW+100 滑行法
混合动力车型适用
CW+100 滑行法
新能源车型适用
参考标准
GB/T 19752-2005 GB/T 19750-2005 GB/T 32694-2016 GB/T 18385-2005 GB/T 18388-2005 GB/T 28382-2012等
CW+187.5 物理参数 混合动力车型适用
CW+187.5 物理参数 混合动力车型适用
CW+187.5 物理参数 混合动力车型适用
CW+187.5 物理参数
新能源车型适用
CW+187.5 物理参数
新能源车型适用
CW+187.5 物理参数
新能源车型适用
CW+375 物理参数 混合动力车型适用
CW+375 物理参数 混合动力车型适用
新能源车型动力经济性主要考核内容如下表所示:
动力性
考核项目
(HEV)1km最高车速(道路) (km/h) (EV)1km最高车速(道路) (km/h) 最高车速发(动HE机V)巡3航0m最in高最车高速车(速km/h) (EV)最大爬坡车速(4%、12%)-1km(km/h) (HEV)最大爬坡车速(4%、12%)-1km(km/h) (HEV)0-100km/h加速时间(s) (HEV)0-400m加速时间(s) (HEV)60-100km/h加速时间(s) 加速性能 (HEV)80-120km/h加速时间(s) (EV)0-50km/h加速时间(s) (EV)50-80km/h加速时间(s) (EV)0-100km/h加速时间(s) (HEV)最大起步坡度(%) 爬坡能力((HEVE)V)最最大大起爬步坡坡度度((%%)) (EV)最大爬坡度(%) (条件A)NEDC工况百公里能耗 经济性 (条件B)NEDC工况百公里能耗 NEDC加权平均油耗(L/100km) 续驶里程(EV)工况纯电续驶里程 (km)
matlabsimulink动力学建模与仿真
matlabsimulink动力学建模与仿真
Matlab Simulink是一种功能强大的动力学建模和仿真软件。
它
可以帮助工程师和科研人员以直观的方式创建和分析各种系统的数学
模型。
使用Matlab Simulink,我们可以轻松地建立复杂的动力学系统模型,例如机械系统、电力系统、控制系统等。
Matlab Simulink提供了丰富的图形化建模功能,用户可以使用
预定义的模块和组件来组装模型。
这些模块包括各种传感器、执行器、控制器等,用户只需拖拽和连接这些模块即可快速搭建所需的系统模型。
用户还可以通过自定义模块来增加系统的特定功能。
在模型建立完成后,Matlab Simulink提供了各种仿真和分析工具,可以帮助用户验证和优化系统设计。
用户可以设置仿真参数,例
如仿真时间、信号输入等,然后运行仿真以观察系统的动态行为。
通
过仿真结果,用户可以评估系统的性能指标,并进行参数调整和优化。
此外,Matlab Simulink还支持与MATLAB的深度集成,用户可以在仿
真过程中使用MATLAB的强大数学和数据处理功能。
总之,Matlab Simulink是一个强大的动力学建模和仿真工具,
它可以帮助工程师和科研人员快速建立和分析各种系统模型。
通过使
用Matlab Simulink,我们可以更好地理解和预测系统的行为,从而提供有效的解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
simulink齿轮扭转动力学
Simulink是一种基于图形化编程环境的仿真工具,可以用来建立动力学模型并进行仿真分析。
本文将以Simulink齿轮扭转动力学为主题,探讨齿轮系统的模拟建模及仿真分析方法。
齿轮是一种常见的机械传动装置,通过齿轮的啮合来传递扭矩和转速。
在机械系统中,齿轮扭转动力学是一个重要的研究方向,涉及到齿轮的运动学和动力学特性。
通过Simulink的建模功能,可以方便地搭建齿轮系统的仿真模型,以实现对齿轮传动的动态分析和性能评估。
我们需要了解齿轮系统的基本原理和参数。
齿轮传动的基本参数包括齿轮的模数、齿数、压力角、齿宽等。
这些参数可以通过实际测量或者设计手册等方式获取。
在Simulink中,我们可以通过建立齿轮的数学模型,将这些参数输入到模型中,以实现对齿轮传动的仿真分析。
我们需要建立齿轮系统的动力学模型。
齿轮系统的动力学模型可以分为两个部分:齿轮的运动学模型和齿轮的动力学模型。
齿轮的运动学模型描述了齿轮的运动规律,包括齿轮的转速、角速度和加速度等。
齿轮的动力学模型描述了齿轮的受力和力矩等动力学特性。
在Simulink中,我们可以使用旋转积分器模块来建立齿轮的运动学模型。
通过设置齿轮的初始位置和速度,可以模拟齿轮的运动过程。
同时,我们可以使用力矩传递模块来建立齿轮的动力学模型。
通过输入齿轮的扭矩和受力,可以模拟齿轮的动力学特性。
接下来,我们可以进行齿轮系统的仿真分析。
在Simulink中,可以设置仿真时间和仿真步长等参数,以实现对齿轮传动的动态仿真。
通过仿真结果,我们可以获得齿轮的转速、角速度、加速度以及受力和力矩等信息。
这些信息可以用来评估齿轮传动的性能和可靠性。
除了基本的齿轮传动模型,Simulink还提供了丰富的工具箱和模块,用于进一步分析齿轮系统的特性。
例如,可以使用频谱分析工具箱对齿轮传动的振动特性进行分析。
可以使用波形分析工具箱对齿轮传动的动态响应进行分析。
通过这些工具,可以更加全面地了解齿轮传动的特性和性能。
Simulink齿轮扭转动力学是一种强大的仿真工具,可以用来建立齿轮系统的动力学模型并进行仿真分析。
通过Simulink的图形化编程环境,我们可以方便地搭建齿轮系统的仿真模型,并获取齿轮传动的各种动态特性。
这对于齿轮传动的设计和优化具有重要的意义,同时也为齿轮传动的故障诊断和预测维护提供了有力的支持。