板壳分析
第九章板壳结构有限元解析

薄板三角形单元
进行一系列的推导后,可得到
形函数的具体计算式为:
薄板三角形单元
建立了位移模式之后,那么剩下的工作就并不复杂:位移模式→ 应变离散→ 应力离散→刚度矩阵→载荷向量→约束处理→求解。
但位移模式是建立在面积坐标上的,相关的计算怎么进行?
导数间的关系为
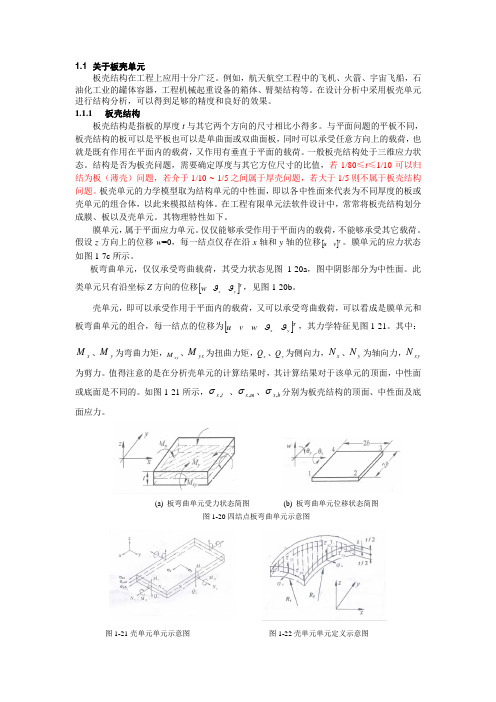
单元数 (1/4板)
2×2 4×4 6×6 理论解
四边固定
板中心挠度 wD/PL2
边中点弯矩 M/P
0.00614
-0.1178
0.00580
-0.1233
0.00571
-0.1245
0.00560
-0.1257
薄板三角形单元
三角形单元能较好地适应斜边界,实 际中广泛应用。单元的结点位移仍然 为结点处的挠度wi和绕x,y轴的转角
壳体:壳体的变形除了横向弯曲变形外,同时存在中面变形。 因此可以认为壳体是平面应力问题和平板弯曲问题的组合。当 然,对于厚壳结构,仍需要横向剪切变形的影响。
薄板结构有限元
薄板基础理论知识
薄平板,取其中性面为坐标面,z轴垂直于中性面。其中 t 为 板厚。当板受有垂直于板中性面的外力时,板的中性面将发 生弯扭变形,从而变成一个曲面。板变形的同时,在板的横 截面上将存在内力——弯矩和扭矩。
Mxy=Myx
内力列向量为
薄板基础理论知识
内力可以根据应力进行计算得到
使用记号
平面应力问题 中的弹性矩阵
于是
薄板基础理论知识
进行反向回代,可以得到
在板的上、下表面处,z=±0.5t,于是应力为
薄板基础理论知识
如果薄板在z方向承受分布荷载
此时薄板内部产生应力 则可以采用虚功原理
关于板壳单元的基本理论
1.1 关于板壳单元板壳结构在工程上应用十分广泛。
例如,航天航空工程中的飞机、火箭、宇宙飞船,石油化工业的罐体容器,工程机械起重设备的箱体、臂架结构等。
在设计分析中采用板壳单元进行结构分析,可以得到足够的精度和良好的效果。
1.1.1 板壳结构板壳结构是指板的厚度t 与其它两个方向的尺寸相比小得多。
与平面问题的平板不同,板壳结构的板可以是平板也可以是单曲面或双曲面板,同时可以承受任意方向上的载荷,也就是既有作用在平面内的载荷,又作用有垂直于平面的载荷。
一般板壳结构处于三维应力状态。
结构是否为板壳问题,需要确定厚度与其它方位尺寸的比值,若1/80≤t ≤1/10可以归结为板(薄壳)问题,若介于1/10 ~ 1/5之间属于厚壳问题,若大于1/5则不属于板壳结构问题。
板壳单元的力学模型取为结构单元的中性面,即以各中性面来代表为不同厚度的板或壳单元的组合体,以此来模拟结构体。
在工程有限单元法软件设计中,常常将板壳结构划分成膜、板以及壳单元。
其物理特性如下。
膜单元,属于平面应力单元。
仅仅能够承受作用于平面内的载荷,不能够承受其它载荷。
假设z 方向上的位移w =0,每一结点仅存在沿x 轴和y 轴的位移[]T v u 。
膜单元的应力状态如图1-7c 所示。
板弯曲单元,仅仅承受弯曲载荷,其受力状态见图1-20a ,图中阴影部分为中性面。
此类单元只有沿坐标Z 方向的位移[]T y x w ϑϑ,见图1-20b 。
壳单元,即可以承受作用于平面内的载荷,又可以承受弯曲载荷,可以看成是膜单元和板弯曲单元的组合,每一结点的位移为[]T y x w v u ϑϑ,其力学特征见图1-21。
其中:x M 、y M 为弯曲力矩,xy M 、yx M 为扭曲力矩,x Q 、y Q 为侧向力,x N 、y N 为轴向力,xy N为剪力。
值得注意的是在分析壳单元的计算结果时,其计算结果对于该单元的顶面,中性面或底面是不同的。
如图1-21所示,t x ,σ 、m x ,σ、b x ,σ分别为板壳结构的顶面、中性面及底面应力。
7_板壳问题有限元分析

1 1 2 h 1 1 2
h
BiT DB j abd d dz
(6.17)
21 /44
薄板问题的有限元法
代入 D 、 Bi 和 B j 于是有
D 1 1 b2 T kij N i , N j , uN iT, N T, uN iT, N T, j j 1 1 a 2 ab +2(1- )N
2
24 /44
薄板问题的有限元法
k23 15H ab(i j )(i j ) b2 b2 k31 3Ha (2 3 5 2 ) j0 15 2 j 5i0 a a k32 15H ab(i j )(i j )
23 /44
薄板问题的有限元法
其中
b2 a2 a2 b2 k11 3H 0 15( 2 0 2 0 ) (14 4 5 2 5 2 ) 00 b b a a a2 a2 k12 3Hb (2 3 5 2 ) 0i 15 2 i 5 0i b b b2 b2 k13 3Ha (2 3 5 2 )i0 15 2 i 50 j a a a2 a2 k21 3Hb (2 3 5 2 ) 0 j 15 2 j 5 0i b b a2 k22 Hb 2(1 ) 0 (3 50 ) 5 2 (3 0 )(3 0 ) b
1 E D 2 1 0
薄板问题的有限元法
图 6.2 平板内力
10 /44
薄板问题的有限元法
设 M x 、 M y 和 M xy 表示单位宽度上的内力矩,于是有
2w 2 x Mx h h3 2 w h3 M M y h2 z dz D DC D 'C (6.5) 2 12 y 12 2 M xy 2w 2 xy
结构力学中的板壳结构振动分析
结构力学中的板壳结构振动分析结构力学是研究结构反应和变形的力学学科。
而在结构力学中,板壳结构的振动分析是一个重要的研究内容。
本文将对板壳结构振动分析的基本概念、方法和应用进行探讨。
一、板壳结构的基本概念板壳结构是指由薄板和薄壳构成的结构形式。
通常情况下,板壳结构广泛应用于各个领域,如建筑、航空航天、汽车等。
板壳结构具有轻巧、强度高、刚度大等特点,因此被广泛使用。
二、板壳结构的振动特性板壳结构的振动特性是指在受到外界激励时,结构内部发生的振动现象。
振动特性是评价结构性能的重要指标之一。
通过研究板壳结构的振动特性,可以了解结构的固有频率、模态形态、振型等信息。
三、板壳结构振动分析的方法1.理论分析法理论分析法是通过建立板壳结构的数学模型,采用分析力学理论进行振动分析。
通过求解结构的固有频率和振型,可以得到结构在不同激励下的振动响应。
2.实验测试法实验测试法是通过运用实验手段进行振动分析。
可以采用加速度计、激光干涉仪等设备对结构进行测量,获取结构的振动特性。
3.数值模拟法数值模拟法是对板壳结构的振动进行数值模拟计算。
采用有限元方法等数值计算手段,建立精确的结构模型,通过求解结构的振动方程得到结构的振动特性。
四、板壳结构振动分析的应用板壳结构振动分析在工程实践中具有广泛的应用价值。
它可以用于评估结构的安全性能,指导结构的设计和改进。
在航空航天领域,板壳结构振动分析可以用于评估飞行器的空气动力性能,提高飞行安全性。
在建筑领域,板壳结构振动分析可以用于评估建筑物的抗震性能,提高建筑物的抗震能力。
综上所述,板壳结构振动分析是结构力学领域中的重要内容,通过研究结构的振动特性,可以评估结构的性能,并指导结构的设计和改进。
在实际应用中,可以采用理论分析法、实验测试法和数值模拟法等方法进行振动分析。
板壳结构振动分析在各个领域中具有广泛的应用价值,对于提高结构的性能和安全性具有重要意义。
板壳力学第十五章

板壳力学第十五章引言本文档将介绍板壳力学的第十五章内容。
在前面的章节中,我们已经学习了板壳的基本概念、力学模型以及几何特征。
本章将进一步探讨板壳的应力分析、扭曲理论以及计算方法。
应力分析在板壳的应力分析中,我们首先要了解板壳内各点的应力分布情况。
板壳内通常存在弯曲应力、切应力以及膜应力。
通过应力分析,我们可以确定板壳在不同载荷下的承载能力,从而保证结构的安全性。
弯曲应力板壳的弯曲应力主要是由于横向弯曲引起的。
我们可以使用横向剪力板壳理论来计算板壳内各点的弯曲应力分布。
该理论假设板壳内部各点的弯曲应力遵循一定的分布规律,通过求解偏微分方程,可以得到弯曲应力的解析解。
切应力板壳的切应力是由于剪切力引起的。
根据板壳的力学模型,我们可以通过基础的剪切变形理论来计算板壳内各点的切应力分布。
切应力的计算通常需要考虑剪切变形对板壳弯曲应力的影响,因此在应力分析中需要综合考虑弯曲和剪切效应。
膜应力板壳的膜应力是由于轴向力或压力引起的。
通过应力分析,我们可以确定板壳内各点的膜应力分布情况。
膜应力可以通过采用静力学方程或使用膜效应理论来计算。
膜应力的分布特征对于板壳的受力分析和设计非常重要。
扭曲理论除了考虑板壳的弯曲、剪切和膜效应外,扭曲也是板壳应力分析的重要因素之一。
在板壳的受力情况下,由于扭转力的作用,板壳将发生扭曲变形。
扭曲变形会导致板壳内部各点的应力分布发生变化,因此在应力分析中需要综合考虑扭曲和弯曲效应。
板壳的扭曲理论是基于理想弹性板壳的假设条件,通过求解偏微分方程,计算板壳内各点的扭转角度和扭转应力分布。
扭曲理论的应用可以帮助工程师更好地理解板壳的受力特性,从而进行合理的结构设计和分析。
计算方法在实际工程中,进行板壳力学的计算通常需要借助计算方法和工具。
以下是常用的计算方法:1.有限元方法:有限元方法是一种常见的数值计算方法,通过将复杂的结构划分成若干小的单元,利用单元的力学行为近似计算整个结构的受力情况。
二维可展板壳结构展开过程分析

De l y n n lsso wo d me so a e ly b ep e d s elsr cu e p o me ta ay i ft - i n in d p o a l a la h l tu t r s l n n
G U A N —i Fu l ng, ZH A N G u —e H if ng。 H A N e l n K ~i g a
第 1 第 5期 5卷 20 0 8年 1 0月
工 程
设
计 学 报
V o1 N O.5 .1j O C . 2008 t
J u n lo o r a fEngne rng De i n i e i sg
DOI 1 . 7 5 j is .1 0 — 5 X. 0 8 0 . 0 : 0 3 8 /.s n 0 6 7 4 2 0 . 5 0 9
( Spa e St u t r s a c nt r c r c u e Re e r h Ce e ,D e a t e fCii En ne rn p rm nto vl gi e ig,
Z ein ie st ,Ha g h u3 0 2 ,C ia h j gUnv riy a n zo 10 7 hn )
可 展 结 构 是 一 种 新 型 工 程 结 构 , 几 何 形 状 能 其 根 据 实 际 情 况 改 变 . 展 结 构 主 要 分 为 刚 性 可 展 结 可 构 和 柔 性 可 展 开 结 构 . 于 柔 性 结 构 特 别 是 薄 膜 结 对 构 的 折 叠 方 式 , . . et 提 出 了 平 面 薄 膜 的 折 S D Gu s
二 维可 展板 壳 结构 展 开过 程 分析
关 富玲 , 惠峰 , 克 良 张 韩
有限元第七章弹性板壳有限元分析

1 y1
x1
4
x3
4
1O y()
2a
y3
2 y2
FQ1
M y1
2
x2 M x1
x( ) 3 2b
FQ4
1O y()
3 x4
M x3
4
2a
y4
M y3
x( )
FQ2 2
M y2 M x2
FQ3 2b
3 M x4
M y4
(a)
(b)
图7-3 矩形单元结点位移和结点力
(2)按此位移模式进行(在无荷载作用下的)单元、 整体分析,并在上述位移边界条件下求解。
(3)若所求得的结点位移构造的小片上的挠度为一 完 全二次多项式,则单元的位移模式通过小片检验。
当薄板程序不能解已知边界支撑位移时,也可按 如下步骤进行小片检验:
(1)取某一单元小片,对小片的每一结点给以对应于 完全二次多项式的结点位移。
(7-10)
式中四次项所以取 x3 y和xy3是为了 保证坐标互换时的不变性和曲率、扭率具
有相同方次(后面还将说明)。对式(7-10)求导可得
x a1 a5 2a6 y a8 x2 2a9 xy a10 y3+3a10 y2 a11x3 3a12 xy2
(7-11)
(7-9)
因为单元结点位移参数(每结点的挠度和绕两坐标轴的转角)
总计有12个(故称12自由度),所以从广义坐标法角度来说
位移模式可取作
w a1 a2 x a3 y a4 x2 a5 xy a6 y2 a7 x3 a8 x2 y
a9 xy2 a10 y3+a10 x3 y a11xy3
7-1 弹性薄板基本理论
4 .板壳问题的有限元法(4学时)

第五章 板壳问题的有限元法
章节内容: 5.1 薄板弯曲的基本理论 5.2 薄板单元:矩形单元和三角形单元 5.3 薄壳有限元分析的简介
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.1 薄板(thin plate)
工程实际中,存在大量的板壳构件(plate and shell) 几何特点:厚度远远小于其它两个方向的尺寸。 薄板:t/b < 1/15 中面:平分板厚度的平面 坐标系oxyz :xy轴在中面上,z轴垂直于中面 z 载荷 作用于中面内的载荷:平面应力问题 垂直于中面的载荷:板弯曲
其中
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
局部坐标系
局部坐标系对整体 坐标系的方向余弦 矩阵(从整体坐标 到局部坐标)
局部坐标系与整体坐标系的关系
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
坐标变换矩阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
转换矩阵:
3.
应力
引起的形变很小,在计算变形时可以忽略。
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.2 位移
位移分量:薄板中面的挠度 w 根据挠度,可以计算:在x和y轴方向上的位移分量和绕x和y轴方 向的转角。
y
z
b
o
车辆工程教研室
t
x
机电工程学院
5.1 薄板弯曲的基本理论
5.1.3 应变及几何方程
机电工程学院
5.1.5 平衡方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
∂w ∂w ∂ w [ χ ] = − 2 ; − 2 ; −2 [ N] de = [ B] de ∂x ∂y ∂xy [ B] = [ B]1 [ B]2 [ B]3 [ B]4
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
薄板的单元列式 在前面已导出
∂w ∂w ∂ w [ χ ] = − 2 ; − 2 ; −2 ∂y ∂xy ∂x
2 2 2 T
Q1 1 My1
Mx1
4 x w3
θx3 θy3
2 y z
3
将位移模式代入可得形变矩阵为
2 2 2 T
2
∂x
;v = −z
∂y
2
; w = w( x, y)
y向曲率 向曲率
扭率
2
他们完全确定板的变形, 他们完全确定板的变形,因此称他们组成的矩 阵为形变矩阵,记作[χ , 阵为形变矩阵,记作 χ],也即
∂w ∂w ∂w ε x = −z 2 ;ε y = −z 2 ;γ xy = −2z ∂x ∂y ∂xy
2) 形函数的确定 龙驭球院士指出利用对 薄板的形函数可以用广 称性可减少确定广义坐标 义坐标法, 义坐标法,也可以用试凑 的工作量, 的工作量 法得到。 ,但是仍然不很 法得到。由于单元自由度 方便。为此 介绍试凑法, 介绍试凑法, 方便,因此可有12个广义 。为此,介绍试凑法 为12,因此可有 个广义 2 首先引入自然坐标ξ=x/a, 坐标, 坐标,位移模式可设为如 η=y/b。 。 下不完全四次多项式
∂w ∂w ∂ w [χ] = − 2 ;− 2 ;−2 ∂y ∂xy ∂x
2 2 2
T
弹性薄板基本知识
由此可得薄板应变矩阵为[ 由此可得薄板应变矩阵为 ε]=z[χ]。 χ。 薄板内力和总势能 1) 设平面应力弹性矩阵为 设平面应力弹性矩阵为[D]’,则薄板应力矩阵 , 为 [σ]=-z[D]’ [χ]。 2) 薄板内力 χ。 微元体如图所示。 微元体如图所示。 h/2 x 由图可得 τ xy zdydz ∫-h/2 h/2 ∫-yh/2 σ x zdydz τ xydydz h/2 σ x dydz τ yx zdxdz ∫
弯矩 扭矩
M = ∫ σ xzdzdy
M'y = ∫ σ yzdzdx
M = ∫ τ xyzdzdy
' xy -h/2
-h/2 h/2
M = ∫ τ yxzdzdx
' yx -h/2
h/2
弹性薄板基本知识
由此可得薄板单位长度内力为M 由此可得薄板单位长度内力为 x、My、Mxy= Myx (dx=dy=1),依此顺序排列的列阵称内力矩 , 记作[M]。 阵,记作 将应力应变关系代入并对z进行积分 进行积分, 将应力应变关系代入并对 进行积分,可得 [M]=[D][χ] χ [D]=(h3/12)[D]’ 式中 ( ) 称作薄板的弹性矩阵。 称作薄板的弹性矩阵。 3) 薄板的应变能
Q1 1 My1 w3 3 y z Mx1 4 x
θx3 θy3
w = a1 + a2 x + a3 y + a4 x2 + a5 xy + a6 y2 + a7 x3 + a8 x2 y + a9 xy2 + a10 y3 + a11x3 y + a12 xy3
利用12个结点位移条件, 利用 个结点位移条件,由广义坐标法可建 个结点位移条件 立形函数,显然十分麻烦。 立形函数,显然十分麻烦。
w = ∑[N]i d i = [N] d e
i =1
4
[]
[]
是非完全协调的。 教材上有更严密的数学证明 教材上有更严密的数学证明) 是非完全协调的。(教材上有更严密的数学证明
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
5) 非完全协调元的收敛性
4 i =1
w = ∑[N]i d i = [N] d e
弹性板壳单元分析初步
弹性板壳单元分析初步
弹性薄板基本知识 弹性薄板矩形(R12) 弹性薄板矩形(R12)单元 三角形(T9) 三角形(T9)单元 拟协调元和广义协调元 矩形平板壳体单元 平板壳体程序的使用 有限单元法I 有限单元法I的结束语
弹性薄板基本知识
弹性薄板基本概念 所谓薄板是指板厚h比板 所谓薄板是指板厚 比板 最小尺寸b在如下范围的平 最小尺寸 在如下范围的平 y 1 1 h 1 1 板 ~ < < ~
?
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
4 2-1) 试凑形函数 1 试凑形函数N 1 x My1 由形函数性质, 由形函数性质,对N1有: N1(1)=1;N1(j)=0,j=2,3,4 ; , w3 θx3 3 N1对x,y的偏导数在结点 2 , 的偏导数在结点 y θy3 z 处均为零。 处均为零。 考虑到挠度是非完全四此式, 考虑到挠度是非完全四此式,为使自动满足 它点为零N 它点为零 1(j)=0 ,可设 Q1 Mx1
弹性薄板基本知识
由克希霍夫假定c) 可推得w与 无 由克希霍夫假定 忽略应变ε z可推得 与z无 等于零,再加上中面无变形 再加上中面无变形, 由 可知 关, b)可知γ zx和γ yz等于零 再加上中面无变形 最终可得 位移只与挠度w有关 ∂w ∂w 位移只与挠度 有关
u = −z
由此结果可得 x向曲率 向曲率
N1 = (1 −ξ )(1−η)(a + b + cη + dξ 2 + eη2 ) ξ
利用所有点N 的导数为零条件, 利用所有点 1的导数为零条件,P.171~172 经式 (c)~(l)的推导 可得 的推导,可得 再由本点处位移的条件,可得 可得d=-1/8,由此 的推导 再由本点处位移的条件 可得 由此
4 因此, 因此,边线的挠度和转角可 1 x 由两端点的挠度和沿边线导数 My1 对应的转角唯一地确定。 对应的转角唯一地确定。 w3 θx3 3 但是, 但是,边界法向转角只 2 y θy3 z 有两端两个法向转角位移 条件,当然无法唯一地确定, 条件,当然无法唯一地确定,所以相邻单元法向 转角位移不协调。 转角位移不协调。 由此可见, 由此可见,由形函数所建立的挠度场 Q1 Mx1
对于薄板等位移场非完全协调的位移模式,如 对于薄板等位移场非完全协调的位移模式 如 何才能保证收敛呢? 何才能保证收敛呢 Irons 给出了小片检验准则: 给出了小片检验准则: 用待检验的单元组成一小片,在无荷载、 用待检验的单元组成一小片,在无荷载、单 元结点位移满足“常应变”状态位移条件时, 元结点位移满足“常应变”状态位移条件时,如 果各结点能够保持平衡且获得“常应力” 果各结点能够保持平衡且获得“常应力”受力状 态,则这种位移模式对应的单元在如此网格下一 定收敛。 定收敛。
Q1 1 My1 w3 3 y z Mx1 4 x
Ni = (1+ξ0 )(1+η0 )
θx3 θy3
2
×(2 +ξ0 +η0 −ξ 2 −η2 )/8 相关的形函数, 对于转角θxi相关的形函数,同样思路推导可得
相关的形函数, 对于转角θyi相关的形函数,可推导得 ,
Nxi = −bηi (1 + ξ0 )(1 +η0 )(1-η )/8
[]
[]
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
小片检验的具体做法 • 取某一单元小片,对小片的每一结点给以对应 取某一单元小片, 并在小片的边界上给出对 于完全二次多项式的结点位移。 于完全二次多项式的结点位移。 。 应于完全二次多项式的边界条件。 应于完全二次多项式的边界条件 • 每一单元按 e=keδe求单元结点力,式中)单元、 • 每一单元按F 按此位移模式进行(在无荷载作用下的 单元、 按此位移模式进行求单元结点力,式中ke为对 (在无荷载作用下的) 应所考察位移模式的单元刚度矩阵。 应所考察位移模式的单元刚度矩阵。 整体分析,并在上述位移边界条件下求解。 整体分析,并在上述位移边界条件下求解。 • 检验小片内部结点处是否均满足结点的自平 • 若所求得的结点位移构造的小片上的挠度为 衡条件,若条件均成立, 衡条件,若条件均成立,则单元位移模式能通 一完全二次多项式, 一完全二次多项式,则单元的位移模式通过分 过小片检验。 过小片检验。 片检验。 片检验。 当程序无法计算 P.173 给出了 已知支座位移问题时 给出了R12检查例子。请大家自己看一看。 检查例子。 检查例子 请大家自己看一看。
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
薄板单元位移模式 4 1 设局部编号1、 、 、 , x 设局部编号 、2、3、4,x 、 My1 y方向长度分别为 、2b的矩 方向长度分别为2a 方向长度分别为 的矩 w3 θx3 形板单元如图所示。 形板单元如图所示。 2 3 y θy3 z 图中还给出了各结点位移和结 ∂w ∂w 点力的示意图。 点力的示意图。 ;θ y = − θx = ∂y ∂x 1) 结点位移和结点力矩阵
T i i xi yi T i i xi
Q1 Mx1
[d] = [w θ θ ] [F] = [Q M [d] = [[d] [d] [d] [d] ] [F] = [[F] [F] [F] [F] ]
T 2 T 3 T T 4 e 1 T T 2 T 3 T T 4 e 1
Myi
]
T
弹性薄板矩形(R12) 弹性薄板矩形(R12)单元
]
θx3 θy3
⋅⋅⋅
4
[N]4 ]
则薄板的挠度场可由结点位移表示为
w = ∑[N]i d i = [N] d e
i =1
[]
[]
4) 单元间位移的协调性 可以证明,上述 上述w在边线上任意一点的挠度和 可以证明 上述 在边线上任意一点的挠度和 转角都是三次多项式。 转角都是三次多项式。