复杂机械零件的六面体有限元网格生成方法_曹华军
映射法在三维六面体有限元网格生成中的应用
ξ(1 - η)ζxEST +ξη(1 - ζ) xENB +ξηζxENT
(16)
当自然区域被分割成六面体子区域后用无限插值公式就可以生成网格节点 ,将节点按正确的
第4期
杨伟军等 :映射法在三维六面体有限元网格生成中的应用
·43 ·
拓扑相连就形成了网格 1 无限插值在许多类型的区域内能生成很好的网格 1 它将复杂区域分 割成简单区域 ,然后在每一个子区域内进行插值 1
逻辑空间中使用 ξ= (ξ1 ,ξ2 , …,ξk) ,在自然空间中使用 x = ( x1 , x2 , …, xn) 1 很明显 ξ1 =ξ,ξ2 =η,ξ3 =ζ以及 x1 = x , x2 = y , x3 = z .
在逻辑空间中 ,用 U3 表示 E3 中的单位立方体 1 自然空间中的物体有两个重要的参数 :
图 4 六面体网格 局部加密
图 5 在空心椭圆柱内 生成六面体网格
图 6 曲面柱内生成 六面体网格
5 结论
本文针对三维六面体有限元网格生成的复杂性 , 提出了解决这一问题的关键技术 ———映 射 1 详细阐述了映射的实质和在网格生成中的具体应用 1 最后实例中生成的六面体网格表明 映射对于三维网格生成起着举足轻重的作用 1
成形状规则的区域 ,同时也可以将生成网格后的实体映射到自然空间得到真实网格 1
315 无限映射
无限映射又叫无限插值 1 基于无限映射的网格生成方法有两个优点 :与偏微分法相比网
格的计算速度快以及能直接控制网格节点的位置 1
在基本的无限插值公式中 ,一次 Lagrange 多项式 1 - ξ,ξ,1 - η和η以及 1 - ζ和ζ都被用
格生成过程即告完成 1如图 1 所示 1 从以上流程可以
一种三维有限元网格生成的新方法

一种三维有限元网格生成的新方法
谢倩茹;耿国华
【期刊名称】《计算机应用研究》
【年(卷),期】2018(035)007
【摘要】针对三维有限元网格的生成速度较慢并且网格质量不高的问题,提出了一种基于约束波前法的三维有限元网格生成算法.算法的主要思想是用背景网格提高网格单元的可控性,避免网格单元生成时验证有效性的计算量,从而快速生成高质量的三维有限元网格.算法首先借助八叉树方法生成背景网格,其次利用背景网格的密度对模型表面进行三角剖分得到初始波前,然后依据背景网格的特征生成实体网格单元,最后对得到的结果进行优化.实验证明,结合了八叉树和推进波前法的三维网格生成算法降低了波前法的时间复杂度,将其效率提高了20%,而且能得到更高质量的网格.
【总页数】3页(P2200-2202)
【作者】谢倩茹;耿国华
【作者单位】西北大学信息科学与技术学院,西安710127;西北大学信息科学与技术学院,西安710127
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种自动划分三维有限元网格的新方法 [J], 刘爱荣;曹中清
2.大幅运动复杂构形扑翼动态网格生成的一种新方法 [J], 肖天航;昂海松;仝超
3.一种基于高阶矢量叠层基函数去除复杂谐振腔三维有限元仿真中的伪直流模式的新方法 [J], 徐立;李斌;杨中海
4.支持裂纹扩展的三维有限元网格生成算法 [J], 贾超;张树壮
5.金属塑性成形三维有限元模拟过程中修正触模节点位置的一种新方法 [J], 詹梅;刘郁丽;杨合;李明奇;杜坤
因版权原因,仅展示原文概要,查看原文内容请购买。
复杂装配体有限元网格生成方法的研究
复杂装配体有限元网格生成方法的研究来源:数控机床网 作者:数控车床 栏目:行业动态 针对复杂装配体有限元网格划分难度大的问题,文中提出了复杂装配体中零部件的联接关系问题的处理办法及几种典型模型(腔体、薄壳体及螺钉、螺栓)的混合(切分、扫掠)网格划分方法,运用了A ys软件对示例模型分别采用自由网格划分与混合网格划分。
结果表明混合网格划分方法比自由网格划分方法形成的单元数目更少、质量更高。
混合网格划分方法可以适用于所有具有类似几何特征的模型。
1 引言网格划分是有限元分析计算中关键步骤,网格划分的好坏直接影响到计算的精度和速度,甚至会因网格划分不合理而导致计算不收敛。
网格划分可分成如下三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性和划分网格。
由于装配体模型的复杂及对模型简化和计算结果精确程度的较高要求,在网格划分方面有如下问题需解决:(l)复杂装配休各零部件的联接关系对复杂装配体各零部件的联接关系的模拟,直接关系到仿真计算的准确程度。
联接关系主要有固连、焊接、螺纹联接、接触等。
采用何种关系模拟,视具体情况及计算结果的精度要求而定。
(2)复杂腔体和薄壳体的网格划分复杂腔体和薄壳体是抽取中面采用2D壳单元来模拟还是采用3D实体单元来模拟;若采用3D实体单元,是采用四面体单元(单元数目多,质量差,计算费时且精度较六面体为差),还是采用映射、扫掠等方法划分为六面体单元。
这些都是需要解决的问题。
(3)螺钉、螺栓的网格划分对于螺钉、螺栓,也要依具体要解决的问题考虑是采用2D杆单元还是3D实体单元;若采用后者,因为复杂装配体的单元及节点数目本身就已非常大,所以必须考虑怎样才能将数目多、质量差的四面体单元转化为数目较少、质量较高的六面体单元。
本文研究了带有螺纹联接的复杂装配体模型的网格划分方法,同时将采用自由网格划分和混合网格划分生成的有限元模型进行比较。
2 复杂装配体有限元网格生成方法复杂装配体有限元网格生成方法可归纳为如下三个方面:2.1 复杂装配体各零部件的联接关系的处理方法由于要涉及到静态接触非线性及模态和随机振动分析,且螺钉、螺栓是一个重要的关注焦点,所以螺纹联接的模拟,采用三维螺栓、螺钉简化模型(省略厂螺纹)和螺栓预紧单元;而接触的模拟,采用气维接触单元。
六面体网格划分教程2014-2-21

这里没有唯一解!
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
实体映射划分—可映射形状
• Solid Map 需要具有可映射形状的实体几何 • 可映射形状的定义为:
这个面板允许你通过已存在的2D单元,基于你输入的参数进行3D网格的划分 使用general 下的子面板可以灵活的使用各种可能的方法控制网格的划分
“Solid Map” 面板 Mesh > Create > Solid Map Mesh > line drag
使用线拉伸(line drag)子面板先选择2D网格,再选择几何模型的一条线作为映射方向
• • • • •
Bounding Surfs 选择封闭一个体的表面 Drag along vector将一个截面按照指定的矢量方向进行拉伸 Drag along normal将一个截面沿着正法线方向进行拉伸 Drag along line 沿一条线进行截面拉伸 Spin 沿一个环路进行截面拉伸
12
• 任何学习都应该是从简单到复杂的循序渐进的过程。 • 要划分复杂的六面体网格要从简单的模型学起:简单的模型更适合学习原理
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
基于STL文件的变密度三维全六面体网格自动生成方法

基于STL 文件的变密度三维全六面体网格自动生成方法张洪梅赵国群程联军山东大学,济南,250061摘要:针对STL 文件在传递复杂几何实体模型信息方面具有精度较高的特点,提出了一种基于STL 文件变密度三维全六面体网格自动生成方法,给出了STL 文件的数据格式及其内容约定,详细阐述了基于STL 文件空间CAE 模型表面特征自动识别、拓扑关系的生成和变密度栅格法加密信息场的建立等关键技术。
实现了在实体模型表面曲率较大和厚度较小的局部区域进行协调加密,可以获得与实体模型边界吻合良好的全六面体协调网格,适合于工程问题的有限元分析计算。
若干复杂实体模型算例表明,该算法实用性强,效果良好。
关键词:STL 文件;全六面体网格;自动生成;模型识别;加密模板中图分类号:TP391 文章编号:1004—132X (2006)19—1997—05Autom atic Density -ch anged A ll -hexahedral E lem ent Mesh G eneration A lgorithm B ased on ST L FileZhang Hongmei Zhao Guoqun Cheng LianjunShandong University ,Jinan ,250061Abstract :Because STL file can transfer the information of solid model accurately ,an algorithm to gener 2ate density -changed three -dimensional all -hexahedral element meshes based on STL file was proposed.Several key technologies were presented ,such as the automatic identification of surface geometric characteris 2tics and topology in three -dimensional CAE model based on STL files ,the construction of refinement metric for density -changed grid -based method and so on.A conformal refinement of the local meshes was realized at the areas where large curvature and small thickness existed.Therefore ,all -hexahedral element conformal meshes ,which were accurately matched to the boundary of the solid model and suitable for finite element a 2nalysis ,can be generated automatically.The effectiveness of the algorithm and the quality of the mesh genera 2tion are demonstrated by using several complex examples.K ey w ords :STL file ;all -hexahedral element mesh ;automatic generation ;identification of CAE model ;refinement template收稿日期:2006—06—20基金项目:国家自然科学基金资助项目(50425517,50375087)0 引言有限元网格生成属于工程科学与计算科学的交叉研究领域,是有限元走向工程应用的桥梁。
针对机械铸造件模型的六面体网格结构简化方法[发明专利]
![针对机械铸造件模型的六面体网格结构简化方法[发明专利]](https://img.taocdn.com/s3/m/56d1ecf94431b90d6d85c7b1.png)
专利名称:针对机械铸造件模型的六面体网格结构简化方法专利类型:发明专利
发明人:徐岗,凌然,金远哲,肖周芳,吴卿
申请号:CN201811388167.4
申请日:20181121
公开号:CN109670206A
公开日:
20190423
专利内容由知识产权出版社提供
摘要:本发明公开了针对机械铸造件模型的六面体网格结构简化方法。
现有六面体网格简化方法很难在达到高简化率的同时保证较高精度的网格结果。
本发明采用权重排序的优先级队列来规划网格结构简化过程,可以有目标地减少网格中奇异结构分布,对于机械铸造件模型六面体网格通过简化处理,最终的输出结果与原始方法对比,可在近似100%单元数还原与指定最大简化率的前提下达到89%以上的奇异结构简化率,并使网格外形的豪斯道夫距离率控制在较小的误差范围内。
申请人:杭州电子科技大学
地址:310018 浙江省杭州市下沙高教园区2号大街
国籍:CN
代理机构:杭州君度专利代理事务所(特殊普通合伙)
代理人:黄前泽
更多信息请下载全文后查看。
一种模拟螺纹配合的六面体有限元网格划分方法[发明专利]
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810208795.3(22)申请日 2018.03.14(71)申请人 上海理工大学地址 200093 上海市杨浦区军工路516号(72)发明人 高大威 郑松林 郑腾飞 李智垠 龙荣利 李向阳 (74)专利代理机构 上海德昭知识产权代理有限公司 31204代理人 郁旦蓉(51)Int.Cl.G06F 17/50(2006.01)(54)发明名称一种模拟螺纹配合的六面体有限元网格划分方法(57)摘要本发明所涉及的模拟螺纹配合表面几何特征的六面体有限元网格划分方法,首先根据螺纹表面与螺纹轴线的距离变化规律,确定单层螺纹横截面轮廓线,将螺纹的最小特征确定轴向有限元网格尺寸;然后根据单螺距内轴向划分的网格层数与相邻层之间的旋转角度关系确定周向有限元网格数量,通过螺栓螺纹端面四边形网格拉伸,形成单层六面体网格,对其进行复制、旋转、节点替代得到单螺距螺栓六面体网格模型;最后再根据公母螺纹齿数,对单螺距网格做复制、平移得到完整螺栓螺纹部分的六面体网格模型。
因此,本发明的六面体有限元网格划分方法无须建立公母螺纹的实体三维模型,无须大量节点坐标计算。
权利要求书2页 说明书6页 附图11页CN 108197418 A 2018.06.22C N 108197418A1.一种模拟螺纹配合的六面体有限元网格划分方法,其特征在于,包括以下步骤:步骤一,采集螺栓和螺母配合状态下一个螺距内螺纹轴向横切面中的结构尺寸;步骤二,获取所述螺栓和所述螺母的径向截面中螺纹牙顶和螺纹牙底上所有点到螺纹轴线的距离的变化规律,然后根据所述结构尺寸和所述变化规律,通过CATIA或UG制图软件绘制所述螺栓与所述螺母配合时啮合端面上的螺栓外螺纹轮廓线、螺母内螺纹轮廓线、螺栓网格分界线以及螺母网格分界线,得到平面图形;步骤三,将所述螺纹牙顶作为最小局部特征,根据所述最小局部特征确定网格的轴向尺寸l和单螺距内网格的层数N,根据所述层数N及周向网格节点的重合关系,确定所述螺栓外螺纹轮廓线上的节点数量n;步骤四,通过CATIA或UG制图软件给所述平面图形添加一个所述轴向尺寸l,将所述平面图形导入有限元软件HYPERMESH,通过quick edit功能,使得所述螺栓网格分界线以外的椭圆环体被节点径向连接形成的n个面均分,从而得到网格实体;步骤五,在有限元软件HYPERMESH中,通过automesh功能,根据所述节点将所述网格实体的端面自动划分二维平面四边形网格;步骤六,在有限元软件HYPERMESH中,通过linear solid功能,将所述二维平面四边形网格轴向拉伸一个所述轴向尺寸l,生成所述端面上的一层六面体网格;步骤七,在有限元软件HYPERMESH中,先通过translate功能,复制步骤六所述六面体网格中的螺栓网格分界线之外的六面体网格,并轴向平移所述轴向尺寸l,再通过rotate功能,将复制得到的所述螺栓网格分界线之外的六面体网格以螺栓的中心轴为轴心沿螺纹变化方向旋转一个网格层错角,然后复制步骤六所述六面体网格中的螺栓网格分界线以内的六面体网格并直接沿轴向平移所述轴向尺寸l,得到第二层六面体网格;步骤八,在有限元软件HYPERMESH中,通过replace功能,替换步骤七螺纹啮合区域六面体网格中螺纹啮合表面上的使相邻两层六面体网格表面不连续的节点;步骤九,在有限元软件HYPERMESH中,重复步骤七和步骤八,直到一个螺距内所有六面体网格全部生成;步骤十,在有限元软件HYPERMESH中,根据公母螺纹齿数,利用软件translate功能,复制步骤六至步骤九中生成单螺距内六面体网格,轴向平移得到完整的螺纹啮合区域六面体网格;步骤十一,在有限元软件HYPERMESH中,新建螺栓光杆网格平面以及螺帽网格平面,根据所述螺栓光杆网格以及所述螺帽网格的网格节点,将网格平面直接拉伸,再复制平移获得螺栓光杆六面体网格以及螺帽六面体网格;步骤十二,根据螺纹周向的网格数量以及网格最小尺寸与网格最大尺寸的差值,确定过渡层数z;步骤十三,将步骤六绘制的螺栓最外圈六面体网格轴向复制z层,每层中选取1个六面体网格,使每层选出的六面体网格大小均匀递减,将每层中比该层被选网格尺寸小的六面体网格全部删除,并用与该层被选网格规格相同的六面体网格补充这层中被删除的部分,然后替换掉网格过渡层的外表面上使相邻两层六面体网格表面不连续的节点;步骤十四,从而得到完整的螺栓六面体网格模型和完整的螺栓螺母啮合六面体网格模型。
复杂旋转体的六面体单元网格划分方法研究
复杂旋转体的六面体单元网格划分方法研究
六面体单元网格划分是一种具有ADE(六边形-三角形-正方形)自由顶点单元混合材料性
能计算,可用于复杂旋转体的三维定位分析和构型运动设计的新型网格划分技术。
六面体单元网格划分有效地分解了复杂的旋转体,从而将大容积的数据量有效地减少到了一维的单元网格。
六面体单元的大小和构型可以根据不同的应用要求,在进行网格划分的过程中实现。
它使得复杂旋转体的三维建模更为精确,同时也节省了大量的计算量。
六面体单元网格划分方法可以在复杂旋转体的建模中大大提高计算效率,能够提供准确的结果。
主要包括几何建模、有限元建模、数据转换以及边界条件,以满足不同应用的需求。
有限元建模过程中,采用六面体单元作为单元网格,以精确模拟复杂旋转体的构型,有助
于提高计算效率和精度。
当建模完成后,可以采用六边形-三角形-正方形结构的六面体单元,将复杂的模型分解为
几何单元,使得计算更加准确,网格划分技术也更加完善。
随着有限元仿真技术的进步,
工程计算用六面体单元分解复杂的旋转体的应用也将变得更多和更全面。
综上所述,六面体单元网格划分有助于实现复杂旋转体的三维定位分析和构型运动设计,它具有有限元计算的精度和快速性,可以大大提高计算效率,且能够提供准确的结果,其应用范围也在不断提高,可以有效地分解复杂模型,可用于各种工程领域,为相关应用提供有用的帮助。
多面约束棱台体全六面体网格生成算法
多面约束棱台体全六面体网格生成算法
多面约束棱台体全六面体网格生成算法
利用四角点双线性插值反映射法确定两多边域间的映射点;运用约束引导线和节点等参光顺法实现对多边形的四边形分解;最后,结合超限映射法与分层原则实现该类实体全六面体有限元网格生成.文中算法拓广了超限映射法的应用范围.实例表明:该算法简单、效率高、生成单元的质量好.
作者:苏财茂柯映林作者单位:浙江大学机械与能源工程学院,杭州,310027 刊名:计算机辅助设计与图形学学报 ISTIC EI PKU英文刊名:JOURNAL OF COMPUTER-AIDED DESIGN & COMPUTER GRAPHICS 年,卷(期):2003 15(10) 分类号:O242.21 TP391.7 关键词:有限元网格生成棱台体六面体网格。
整体叶盘参数化造型及六面体网格生成方法研究
南京航空航天大学硕士学位论文
摘
要
本 文 介 绍 了 整 体 叶 盘 的 结 构 特 点 ,整 体 叶 盘 是 航 空 发 动 机 中 高 速 转 动 的 关键件,与传统的榫头榫槽型结构相比,整体叶盘具有重量轻、结构简单、 零 件 数 目 少 、可 靠 性 高 等 特 点 。其 几 何 形 状 比 较 复 杂 ,在 运 行 时 要 承 受 高 转 速 带 来 的 巨 大 离 心 力 及 高 温 气 体 的 作 用 ,工 作 环 境 比 较 恶 劣 。为 了 保 证 整 体 叶 盘 工 作 的 安 全 性 ,必 须 在 设 计 阶 段 采 用 有 限 元 方 法 获 得 其 精 确 的 强 度 振 动 特 性 ,而 高 质 量 的 三 维 有 限 元 网 格 是 保 证 分 析 结 果 精 确 性 的 基 础 。六 面 体 单 元在有限元分析时具有描绘几何实体精确、 计算精确度高、 结果稳定的优点。 Open CASCADE 是 一 种 CAD/CAM 软 件 开 发 平 台 , 本 文 对 基 于 Open CASCADE 平 台 的 参 数 化 实 体 造 型 方 法 进 行 了 深 入 地 研 究 , 并 在 此 基 础 上 实 现 了 对 整 体 叶 盘 的 参 数 化 建 模 。针 对 整 体 叶 盘 的 结 构 特 点 ,应 用 扫 掠 法 对 整 体 叶 盘 分 区 域 生 成 六 面 体 网 格 :先 是 采 用 铺 砌 法 在 整 体 叶 盘 上 所 选 择 的 源 曲 面 表 面 生 成 四 面 体 网 格 ,再 用 最 小 二 乘 近 似 仿 射 变 换 的 方 法 将 源 曲 面 网 格 映 射 到 目 标 曲 面 , 在 生 成 连 接 曲 面 网 格 之 后 , 最 后 使 用 BMSweep 算 法 生 成 内 节点。 对 整 体 叶 盘 的 网 格 划 分 表 明 ,使 用 上 述 方 法 生 成 的 网 格 质 量 较 高 ,能 很 好地满足有限元分析的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图3
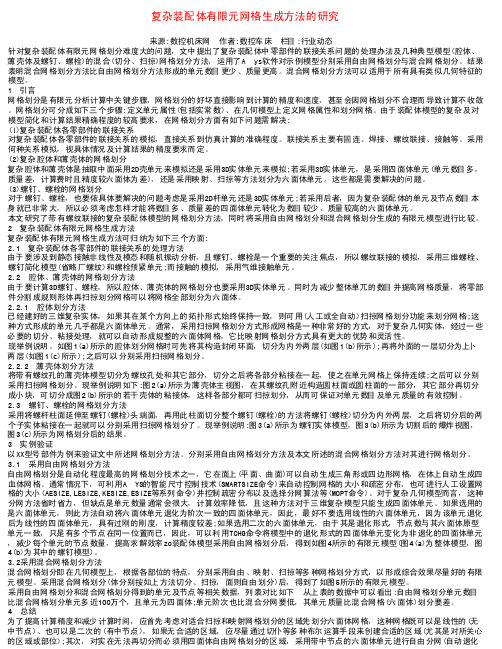
计算域虚拟规划策略
(3) 确定物理场分析的场效响应边界为物理特
征区域,例如图 2c 所示的流场边界。
基于上述计算域虚拟规划策略可以将给定机 械零件的计算域拆分为若干具有同坯特性的简单六 面体子域族。计算域虚拟规划过程如图 4 所示,其 规划算法步骤如下。
(4) 确定有限元分析中预先设定的结果观察区
月 2014 年 8 月
曹华军等:复杂机械零件的六面体有限元网格生成方法
115
(4) 确定三维结构端部边界为几何关键区域, 例如图 1d 所示的端部结构。
2.2
模型计算域的虚拟规划
映射法、扫描法、栅格法等常用六面体网格划 分方法不能直接或有效地实现复杂外形机械零部件 六面体网格生成。所以通过模型计算域虚拟规划策 略产生系列能直接六面体网格划分的简单计算域至 关重要。图 3 所示为几种重要的计算域虚拟规划 策略。
eu u u
分别为位移精确解和近似解。 式中, u 和 u 应力近似解与精确解的误差 e 可定义为 e
(3)
(4)
分别为应力精确解和近似解。 式中, 和 实际计算时, 采用相对精确的应力改进值 * 代
替精确的应力值 计算能量范数误差,由此得到单 元误差的能量范数为
较困难。 目前的划分方法包括映射法、 区域分解法、 [4] 栅格法和推进波前法等 ,均无法将任意外形的复 杂机械零件自动生成高质量的六面体网格。因此, 研究复杂机械零件六面体网格生成方法具有重要的 意义与工程价值。 复杂外形结构的六面体网格自动生成方法是 三维网格生成的研究热点和难点。近年来,国内外 不少研究者对复杂外形结构的六面体网格生成方法 进行了卓有成效的研究和探索。 RUIZ-GIRONÉS 等 提出了基于子映射法的表面多联通结构的六 [6] 面体结构化网格生成算法;SHIVANNA 等 提出了 基于特征的六面体多域网格自动生成方法及其质量 [7-8] 优化算法;SU 等 研究了基于栅格有限元的三维 [9] 六面体网格划分方法及其应用准则;肖周芳等 研 究了多源多目标的体结构全六面体有限元网格划分 [10-11] SHEPHERD 等 方法; 提出针对自适六面体网格
域为物理特征区域,例如图 2d 所示的关注区域。
(1) 生成初始模型。根据给定零件的几何模型
的特征边界产生包络边界的空间六面体计算域,记 为 ( R) 。
(2) 生成规划模型。采用计算域虚拟规划策略
对初始模型进行分解,产生系列六面体计算子域并 将多余子域移除,记 ( Ri ) 为第 i 个子域,则
[12-14]
T ||e e || e ||e || u u Ce dV ve
(5)
( )T C ( )dV ve
式中,C 为单元柔度矩阵。 结构总体误差的能量范数为
T || e || e |||| u u Ce dV v
[4-5]
* 国家重点基础研究发展计划(973 计划, 2011CB013400-05)和教育部博士 点基金(20110191110005)资助项目。20130902 收到初稿,20140520 收到 修改稿
114
机
械
工
程
学
报
第 50 卷第 15 期期
1/ 2
的局部粗细化方法及其优化算法;赵国群等 针 对金属加工成形过程分析提出了自适应六面体网格 生成与再划分算法。上述各方法在高质量的六面体 网格生成中发挥着重要作用。 然而,现有方法由于其策略不同,其适用范围 和条件受限,对复杂机械零件几何特征与物理特性 表达不足,网格的质量和疏密合理性也难保证,因 此开展面向复杂外形机械零件 ( 如,离心压缩机叶 轮、 航空发动机转子等)六面体有限元网格生成方法 的研究非常必要。鉴于此,本文提出一种面向复杂 机械零件的全六面体网格生成方法,旨在生成疏密 有致的高精度有限元网格。首先,研究有限元网格 误差估算理论,然后,对复杂机械零件的关键性区 域进行识别并对计算域进行虚拟规划;其次,利用 网格生成算法和节点加密算法产生六面体网格并评 估其质量;最后,分别以含几何特征、物理特性及 复杂型面的机械零件进行算例验证。
数,且
|| e || || u || || e ||e m1/ 2 || e ||e 1 e || e ||a || u ||
(7)
式中, 为结构整体许用能量误差;m 为结构单元 应力恢复使应力在计算域内具有与位移相同 [2] 的连续性 。设 是单元内部应力恢复后的改进 值,其求解问题可描述为
( R) =
( Ri ) i 1
m
i=1,2,...,m
Hexahedral Mesh Generation Method for Complex Mechanical Structure
CAO Huajun SHU Linsen XU Lei LI Hao
(The State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400030)
摘要:为了解决复杂机械零件有限元仿真效率与计算精度难以保证的问题,提出一种面向复杂外形机械零件的全六面体有限 元网格生成方法。通过引入有限元网格误差估算理论对关注区域的误差特性及其导致因素进行分析;基于复杂外形机械零件 的几何特征与物理特性建立模型关键区域识别准则,并研究模型计算域虚拟规划策略给出其算法及其实施步骤;以模型计算 域虚拟规划为基础,提出了六面体网格生成算法与结果网格的质量评价准则。算例应用验证表明,该方法能将复杂机械零件 进行全六面体有限元网格划分,生成的结果网格具有关键区域特征表达准确、全局网格分布合理且单元质量高等特点。 关键词:复杂机械零件;六面体网格;关键区域;虚拟规划模型 中图分类号:TP273;O24
模型关键区域的网格质量是影响有限元仿真 计算精度的关键。因此识别关键区域是保证复杂外 形机械零件有限元网格划分质量水平的前提。下面 重点研究基于几何特征和基于物理特性的关键区域 识别准则。 复杂机械零件几何特征关键区域识别的准则 如下。 (1) 确定三维结构相交或相贯部位为几何关键 区域,例如图 1a 所示的相贯结构。 (2) 确定三维结构中小曲率或曲率突变部位为 几何关键区域,例如图 1b 所示的倒角结构。 (3) 确定三维尺寸相对较小的局部特征为几何 关键区域,例如如图 1c 所示的小孔结构。
(a) #形策略
(b) Y 形策略图1来自几何特征关键区域复杂外形机械零件物理特性关键区域识别的 准则如下。
(1) 确定由于制造工艺过程形成的异质材料相
交部位为物理特性关键区域, 例如图 2a 所示的焊接 结构。
(c) O 形策略 (d) U 形策略
(2) 确定结构中承受载荷的局部区域为物理特
性关键区域,例如图 2b 所示的局部承载区域。
第 50 卷第 15 期 2014 年 8 月
机
械
工 程
学
报
Vol.50 Aug.
No.15 2014
JOURNAL OF MECHANICAL ENGINEERING
DOI:10.3901/JME.2014.15.113
复杂机械零件的六面体有限元网格生成方法*
曹华军 舒林森 许 磊 李 浩
重庆 400030) (重庆大学机械传动国家重点实验室
1/ 2
1/ 2
1/ 2
m )T C ( )dV ve ( e 1
(6)
式中,m 为整体结构的单元数量。 对于某确定问题的有限元计算,可以采用总体 误差指标 和单元误差指标 e 。两个误差满足如下 精度准则
1
有限元网格的误差估算理论
0
前言
*
诸如飞行器、舰船、车辆及机床等重大机械装 备的关键零部件多为复杂非规则结构,因此复杂机 械零件的有限元网格生成有着广泛的工程应用背 景。优良的网格是高效、高精度有限元物理场分析 [1-2] 的关键,其生成方法备受关注 。与四面体网格相 比,六面体网格具备求解精度高、收敛速度快、变 形特性好、单元数量少、计算机资源成本低等优点 [3] 是数值分析的首选网格 。但六面体网格具有复杂 的拓扑关系且模型适应能力差,对于不规则外形机 械零件,连续完整的六面体有限元模型网格生成比
应力改进值 泛函数变分为
v
1 )T N i dV 0 ( i e 2 i 1, 2, , ne
2
(2)
2.1
模型关键区域识别与计算域规划
模型关键区域识别
对 ne 个方程组进行求解即可得到节点的应力 恢复值,从而计算出整体计算域内的应力恢复值。 位移近似解与精确解的误差 eu 定义为
Abstract:An all hexahedral finite element mesh (FEM) generation method is proposed for complex mechanical structure, with the purpose to guarantee finite element simulation efficiency and precision in complex mechanical structure. The error characteristics and its cause in focus local mesh are analyzed by the finite element mesh error estimation. Based on the geometrical features and physical properties of the complex mechanical structure, the recognition criteria of critical region are established. Hexahedral mesh generation algorithm and implementation steps are presented based on the virtual planning model of structure calculation domain and the mesh quality evaluation criterion is also build. Numerical examples show that this method has the ability to generate all hexahedral finite element mesh for complex mechanical structure and critical regions are expressed accurately, and global mesh is distribution with rationality and high quality. Key words:complex mechanical structure;hexahedral-mesh;critical region;virtual planning model