直齿差速器设计构想与运动仿真
减速器运动仿真课程设计

减速器运动仿真课程设计一、课程目标知识目标:1. 学生能理解减速器的基本原理和运动特性,掌握减速器在机械系统中的应用。
2. 学生能够运用物理知识和数学方法,分析减速器运动过程中的速度、加速度和位移等参数。
3. 学生能掌握减速器运动仿真的基本步骤和方法,理解仿真软件的操作原理。
技能目标:1. 学生能够运用CAD软件进行减速器零件的设计与绘制。
2. 学生能够利用运动仿真软件,构建减速器模型,进行运动仿真分析。
3. 学生能够分析仿真结果,提出优化方案,提高减速器的性能。
情感态度价值观目标:1. 学生通过课程学习,培养对机械设计和运动仿真的兴趣,增强对工程技术的认识。
2. 学生能够树立正确的工程观念,认识到团队合作的重要性,培养协作解决问题的能力。
3. 学生能够关注减速器在工程实际中的应用,关注科技创新,提高社会责任感和使命感。
课程性质分析:本课程为高二年级机械设计与制造课程的一部分,以实践性和实用性为主,注重培养学生的动手能力和工程思维。
学生特点分析:高二学生在知识储备和操作技能方面具备一定的基础,对新鲜事物充满好奇,具备较强的学习意愿和探究精神。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,提高学生的操作技能和问题解决能力,培养学生良好的工程素养。
通过分解课程目标,使学生在完成具体学习成果的过程中,达到课程目标的要求。
二、教学内容1. 理论知识:- 减速器原理:介绍减速器的工作原理、类型及减速比的计算。
- 机械运动学:回顾速度、加速度、位移等基本概念,分析减速器运动过程。
2. 实践操作:- CAD软件应用:学习CAD软件的基本操作,完成减速器零件的设计与绘制。
- 运动仿真软件应用:掌握运动仿真软件的基本操作,构建减速器模型,进行运动仿真分析。
3. 教学大纲:- 第一周:学习减速器原理,进行减速器类型及减速比的计算练习。
- 第二周:复习机械运动学基础知识,分析减速器运动过程。
- 第三周:CAD软件教学,指导学生完成减速器零件设计与绘制。
机械工程学院大学生课外科技训练减速器建模装配设计与运动仿真
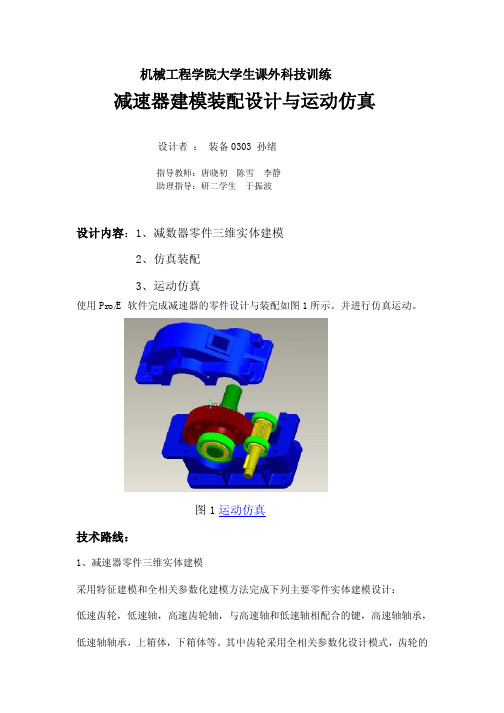
机械工程学院大学生课外科技训练减速器建模装配设计与运动仿真设计者:装备0303 孙绪指导教师:唐晓初陈雪李静助理指导:研二学生于振波设计内容:1、减数器零件三维实体建模2、仿真装配3、运动仿真使用Pro/E 软件完成减速器的零件设计与装配如图1所示。
并进行仿真运动。
图1运动仿真技术路线:1、减速器零件三维实体建模采用特征建模和全相关参数化建模方法完成下列主要零件实体建模设计:低速齿轮,低速轴,高速齿轮轴,与高速轴和低速轴相配合的键,高速轴轴承,低速轴轴承,上箱体,下箱体等。
其中齿轮采用全相关参数化设计模式,齿轮的参数为模数、齿数、压力角及齿轮厚度。
1.1 、参数化渐开线齿轮设计齿轮的三维建模在机器产品如减速器和齿轮泵的建模中具有广泛的用途。
实现齿轮参数化三维建模可以使齿轮的三维模型更加接近齿轮的真实三维模型,同时也可以提高产品的建模效率。
基于Pro/E的齿轮参数化三维建模的核心技术是根据齿轮齿廓渐开线的生成原理,利用齿廓渐开线方程计算出齿轮齿廓渐开线上点的直角坐标值,绘制出渐开线,按渐开线曲线拉伸成齿轮齿廓的实体。
齿轮齿廓渐开线生成原理基于Pro/E平台的齿轮参数化三维建模的关键是要绘制出二维的齿轮齿廓渐开线。
因此必须根据渐开线的生成原理,输入参数化绘制齿轮齿廓渐开线的方程。
图2显示了渐开线方程上任一点的参数关系。
有三个重要的基本角度,即:表示;展开角─基圆半径OA与OC之间的夹角,以фу渐开角─基圆中心O渐开线的直角坐标参数方程为:x﹦R b(cosφ+φ·sinφ)y= R b(sinφ-φ·cosφ) (1)式中: x,y―渐开线上任一点的直角坐标值R b—渐开线基圆半径φ—渐开线发生线在基圆上的滚动角度S b=π/z·R b+2 R b·invα (2)式中: S b—齿轮基圆的齿厚α—压力角根据渐开线参数方程(1),计算出渐开线上一系列点的直角坐标值, 完成齿轮参数化三维建模,该程序中主要的参数为模数m 和齿数z 、压力角ANGLE 和齿厚b ,输入以上参数后便可以自动生成直齿圆柱齿轮的三维模型。
毕业设计(论文)-基于proe的减速器的结构设计及运动仿真[管理资料]
![毕业设计(论文)-基于proe的减速器的结构设计及运动仿真[管理资料]](https://img.taocdn.com/s3/m/92749f330c22590103029d61.png)
襄樊学院毕业设计(论文)正文题目基于PRO/E的减速器的结构设计及运动仿真专业班级姓名学号指导教师职称2007年3 月20 日摘要齿轮减速器是广泛应用于机械行业的机械装置。
它是一种在原动机与工作机之间用来降低转速的独立传动装置。
随着科学技术和国民经济的发展,在机械传动系统中的需求量越来越大,质量要求也越来越高,传统的减速器设计方法己不能满足用户的需求。
为了适应社会的发展,本论文对减速器本身的结构特点和性能进行研究。
运用PRO/E软件的高级建模技术和机构运动仿真技术对一级直齿圆柱齿轮减速器进行三维建模、虚拟装配及运动仿真。
这样更直观,更全面地反映了减速器的设计意图,让设计者在设计阶段就能清楚地见到产品的最终结果,及时发现设计问题,缩短设计开发周期。
既减轻了工作量又节省资金。
大大提高了产品的设计开发效率。
符合现代技术的发展要求。
关键词:齿轮减速器、PRO/E软件、三维建模、虚拟装配、运动仿真Abstract:The gear reducer is widely applies to the mechanical profession mechanism。
It is one kind uses for the desponding between Original machine machine and the working machine the independent。
With the development of science technology and national economy; larger number and higher quality involutes cylindrical reducer are required, and the traditional design method could not satisfy the requirement of users. In order to adapt to developing society. Using PRO/E function and so on software high-level modeling technology and organization movement simulation realizes level of cylindrical greases reduction gear various spare parts and the entire machine 3D geometry design、the assemble fictitiously and assembles and the movement simulation. Is like this more direct-viewing, comprehensively had reflected the reduction gear design intention, enables the designer in the design stage clearly to see the product the final outcome, promptly discovered the design question, and reduces the design development cycle. Both reduced the work load and to save the fund. Conforms to the modern technology development requirement.Key word: gears reducer; Pro/E software; 3D; assemble fictitiously; motion simulation目录第一章绪论 ............................................................. - 1 -§研究的目的及意义 (1)§国内外的研究现状及发展趋势 (2)§主要研究内容、途径及技术路线 (2)§....................................................................... - 2 - §....................................................................... - 3 - §本章小结.. (4)第二章减速器的零件结构设计 .............................................. - 6 -§减速器总体结构的分析.. (6)§减速器主要零件的三维造型 (6)§....................................................................... - 6 - §...................................................................... - 14 - §...................................................................... - 15 - §...................................................................... - 18 - §. (18)第三章减速器的装配 ..................................................... - 19 -§. (19)§ (19)§ (21)§ (22)第四章减速器的运动仿真 ................................................. - 23 -§. (23)§ (23)§机构仿真 (26)§ (29)第五章结束语 ............................................................ - 30 -谢辞.................................................................... - 31 -参考文献.................................................................. - 32 -第一章绪论§研究的目的及意义当今任何一个国家,若其要在综合国力上取得优势地位,就必须在科学技术上取得优势。
齿轮差速器的参数化建模与运动仿真
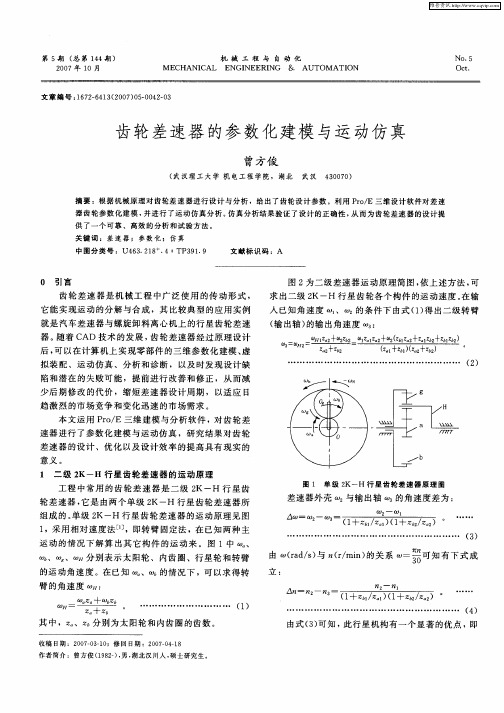
在对 行 星齿 轮齿 数选 择计 算 时 ,必 须根 据行 星传 动 的特 点 ,使它 们满 足一 些条 件 ,才能 将 相应 的齿 轮 进 行装 配 ,并正 常运 行 。本文 主要 根据 4个 条件 来进 行 行星齿 轮 差速 器 的设计 : 传动 比条 件 、 接条 件 、 邻 同 心 条件 、装 配条 件- 。 2 ]
维普资讯
第 5期 ( 第 1 4 ) 总 4 期 20 0 7年 1 0月
机 械 工 程 与 自 动 化 M ECHANI AL ENGI C NEERI NG & AUTOM ATI ON
N o. 5
Oc . t
文 章 编 号 :6 26 1 ( 0 70 —0 20 1 7—4 3 2 0 ) 504 — 3
臂 的角速 度 C : O H
O  ̄C bZ b ( — — — 一 。 - 一 — — 0 H O C
— a
—
图 1 单级 2 K—H 行 星 齿 轮 差速 器原 理 图
差 速器外 壳 C O 与输 出轴 C 的角 速度差 为 : O 。
AC = C 2 C 3 O O 一 O
齿 轮 差速 器 的参 数 化建 模 与运 动仿 真
曾方俊
( 汉 理 i 大 学 机 电i 程 学院 ,湖 北 武 汉 武 f _ f _ 407) 3 0 0
摘 要 :根 据 机 械 原 理 对 齿 轮 差 速 器 进 行 设 计 与分 析 ,给 出 了齿 轮 设 计 参 数 。利用 P o E 三 维 设 计 软 件 对 差 速 r/ 器 齿 轮参 数 化 建 模 , 进 行 了运 动仿 真分 析 。 真 分 析 结 果 验证 了 设计 的正 确性 , 而 为 齿 轮 差 速 器 的 设 计 提 并 仿 从 供 了一 个 可 靠 、高 效 的分 析 和 试 验 方 法 。
机械设计制造及自动化专业毕业设计说明书—齿轮传动建模与仿真
基于Pro/e少齿数(Z=2)齿轮传动的建模与研究王军(陕理工机械工程学院机械设计制造及其自动化专业机自041班,陕西汉中 723003)指导教师:王保民[摘要]:阐述了少齿数渐开线圆柱齿轮机构的传动特点, 论述了渐开线和过渡曲线的方程推倒及其参数的确定,阐明了变位系数、螺旋角和几何尺寸的确定及计算, 从而奠定了少齿数渐开线圆柱齿轮机构机构学的理论基础。
齿轮的参数化设计是提高齿轮建模效率的有效途径,基于Pro /E Wildfire 4.0 平台的参数化精确建模功能, 通过编Pro/E的模型程序, 实现了少齿数齿轮自动化建模设计, 并且实现齿轮基本参数的改变自动生成新齿轮。
该齿轮设计方法可使设计人员方便快捷地实现齿轮的三维特征造型设计,从而提高设计效率。
[关键词]:坐标转换少齿数变位系数 PROE软件传动仿真Based on PROE(Z = 2) less teeth of Gear drive'sModeling and ResearchWang jun(Grade04,Class1,Major Machine design manufacture and automation,Mechanical engineering institute Dept,Shanxi University of Technology, Hanzhong 723003, Shanxi)Tutor: Wang BaominAbstract:In this paper, we first introduce the determ ination of engaging point, and the characteristics of involute、conjugate profile. In section 2, we present methods for determ ining the modification coefficient, helical angle, and geometric size of low number teeth involute spur gear mechanism. Some conclnsions are drawn in section 3. The gear is to improve the design parameters of gear modeling efficient and effective way, based on the Pro/E Wildfire 4.0 platform for accurate modeling parameters of the function of an editorial Pro / E of the model program, has less teeth gear design automation modeling, and To achieve the basic parameters change gears automatically generate a new gear. The gear design allows designers to quickly and easily achieve the three-dimensional characteristics of gear design, thereby improving the efficiency of the design.Key words:Coordinate Conversion; Low-number Teeth; Modification coefficient; PRO/E software; Transmission; Simulatio目录1前言 (1)1.1研究意义 (1)1.2少齿数齿轮现状分析 (1)1.3齿轮成形技术的现状 (2)1.4P RO/E NGINEER (2)2 理论分析与研究阶段 (4)2.1理论基础 (4)2.2坐标转换法推导齿轮齿廓线方程 (5)2.1.1 齿廓曲线普遍方程式的推导 (5)2.2.2 齿轮的渐开线的方程式求解 (7)2.2.3 齿轮的过渡曲线的方程式求解 (11)2.3少齿数计算过程 (13)2.3.1 数据初定 (13)2.3.2 设计结果校核计算 (14)2.3.3 修正设计结果 (20)3 三维建模 (22)3.1软件简介 (22)3.1.1 Pro/Engineer软件包 (22)3.1.2 Pro/ASSEMBLY 安装模块 (23)3.2参数化技术简析 (23)3.3齿轮的参数化建模设计 (24)3.3.1 零件分析 (24)3.3.2 绘制齿轮 (25)3.4参数化问题分析 (32)4 其他零件的设计建模 (34)4.1轴 (34)4.2轴承 (34)4.3端盖 (35)4.4箱体 (36)4.5箱盖 (37)5 减速器的装配总成 (38)5.1零件装配的基本流程 (38)5.2装配过程中常用的配合方法 (38)5.3装配 (39)6 减速器的运动仿真 (41)6.1运动仿真 (41)6.2.1 运动仿真概述 (41)6.2.2 减速器仿真 (41)总结 (42)致谢 (43)参考文献 (44)外文翻译 (45)附录 (55)附录A基本理论依据 (55)附录B齿轮绘制在PROE软件中的公式程序化过程 (56)附录C C语言验证程序 (59)附录D A UTOLISP 程序 (60)1前言1.1 研究意义可以在传动比不变的情况下减少齿轮传动的体积与尺寸。
基于CATIA和ADAMS的轿车差速器参数化设计及仿真
3 基于 C A T I A和 A D A MS的轿车 差速器参数化 设计及 4 结束语 仿 真 方 法
总之 ,差速器参数化设计对轿 车设计有着至关重要 的指 导意义。 3 . 1 基于 C A T I A的差速器参数化模型建立 轿 车设 计人员 应该在 明确 C A T I A和 A D A MS 定义 的前提 下 ,了解 轿 基于 C A T I A 的差速器参 数化模 型建立 要求设 计人 员在 明确各项 车 差速 器参数 化设 计的方 法和特 点 ,对基 于 C A T I A和 A D A MS的轿
前后轴载荷 比例 发动机最大转矩 ( N. 1 3 3 ) 最低档 传动比
车 轮 滚 动 半 径
6 :4 1 4 2 4 . O 1 2
1 . 2 3
驱动桥数量
主 减 速 比
3
5 . 0 6 1
2 轿车差速器参数化设计 的方法 和特点
轿 车差速器参数化设 计的方法主要有 :第一 ,代数法 ;第二 ,基 于规则 的方法 ;第三 ,直接 编程 / 参数化操作法 ;第四 ,基于构型 变 异 的参数 化方法。 以上方法均在 轿车差速器参数化 设计中发挥着至关 重要 的作 用 ,设计人 员必须针 对实际设计要求选 择合 适的参数化设 计 方法才能从根本 上提 高轿车 差速器 的使用效率。 轿车差速 器参 数化设计 的主 要特 点有 :第一 ,设计 工作对初始设计 的 要求较低 。在 进行初步设计 的过 程中 ,不需要绘 画精 准性百分百 的设 计 图形 ,只 需要将相关的参数联 系在一起 ,紧接着结 合适当的约束 既 可 以得 到设计所需要 的图形 ;第二 ,有助于系列化设 计。当设计 的产 品 已经成型 后 ,设计人员只需要对 相关参数进行调整 就可以完成其他 产 品的设计 ;第三 ,很容易修改和 编辑。如果设计过程 中遇到不符合 设计要求 的参 数可以随时对其进行 编辑修改 ,直到该参 数满足设计产 品的实际需求 。
基于CATIA的齿轮参数化设计建模及运动仿真
基于CATIA的齿轮参数化设计建模及运动仿真齿轮是机械传动中常用的元件,用于传递动力和转动运动。
其设计和制造过程需要精确的参数化建模和运动仿真,以确保其稳定性和性能。
CATIA是一款功能强大的三维建模软件,可用于实现齿轮的参数化设计和运动仿真。
以下是基于CATIA的齿轮参数化设计建模及运动仿真的步骤:1.齿轮参数化设计:首先,需要确定齿轮的几何参数,如齿数、模数、压力角等。
在CATIA中,可以根据这些参数创建一个齿轮模型,并将其参数化,使得可以根据不同的参数值自动生成不同的齿轮模型。
参数化设计可以有效地提高设计效率和灵活性。
2.齿轮建模:基于确定的齿轮参数,使用CATIA中的齿轮建模工具创建齿轮的几何模型。
可以选择不同的齿轮类型,如圆柱齿轮、圆锥齿轮等,并根据需要进行形状调整和修饰。
3.齿轮装配:如果需要进行多个齿轮的装配设计,可以使用CATIA的装配设计工具来构建整个齿轮传动机构。
通过将不同的齿轮模型组装在一起,可以实现齿轮传动机构的建模和设计。
4.齿轮运动仿真:基于建立的齿轮模型和装配设计,在CATIA中进行运动仿真,以验证齿轮传动的性能和稳定性。
可以通过设置不同的运动参数和加载条件,模拟齿轮传动过程中的动态行为。
同时,可以进行动力学分析,评估齿轮传动的负载和力学特性。
5.优化和修改:根据仿真结果,可以对齿轮模型和装配设计进行优化和修改。
通过调整参数和改进设计,可以提高齿轮传动的效率和可靠性。
在CATIA中,可以直接修改参数,并自动更新齿轮模型和装配。
利用仿真结果的反馈信息进行优化设计,从而提高齿轮传动的性能。
总结:基于CATIA的齿轮参数化设计建模及运动仿真,可以有效地提高齿轮传动的设计效率和品质。
通过参数化设计和运动仿真,可以快速生成并优化齿轮模型,验证齿轮传动的性能,提高传动效率和可靠性。
同时,CATIA提供了丰富的工具和功能,可帮助工程师进行齿轮传动的设计和优化,提高产品的竞争力和市场价值。
基于ADAMS的差速器建模与运动仿真分析
作者简介:任志立(1994-),男,硕士研究生,研究方向:数字化设计、卷烟机械。 通讯联系人:李浙昆(1957-),男,博士,教授,研究方向:现代集成制造、智能测量、先进矿物加工技术等。
第40卷第7期软件源自1.2差速器差速传动原理 对称式锥齿轮差速器是较为常用的差速器,它
对运动仿真的结果进行分析,得出对称式锥齿轮差速器中各构件的运动特性,可以更深入的了解差速器的工作原理。
关键词:差速器;adams;三维实体建模;运动仿真;运动特性
中图分类号:TP202
文献标识码:A
DOI: 10.3969/j.issn.l003-6970.2019.07.032
本文著录格式:任志立,李浙昆.基于ADAMS的差速器建模与运动仿真分析[J].软件,2019, 40 (7): 169-173
而在一秒之后仿真模拟的则是汽车进行左转弯时的情况从图上我们可以明显看出汽车在进行左转弯时差速器的左侧半轴齿轮角速度明显减小右侧半轴齿轮的角速度明显变大这种情况反映在车轮上表现为汽车在进行左转弯时汽车的左轮运动的距离较短汽车的右轮运动的距离较长而且从主动轴输入的驱动力经过差速器的分配右侧半轴得到的驱动力大于左侧半轴得到的驱动力9
[Abstract] : Differential plays an important role in straight-line driving and cornering driving of automobiles. The internal structure of differential is complex and there are many mechanisms, including deceleration mechanism, dif ferential gear train mechanism, transmission half-axle mechanism, etc. Therefore, the motion characteristics of the internal mechanism of differential are very complex. Symmetrical bevel gear differential is commonly used in vehi cles, and the motion characteristics of each mechanism are representative among all types of reducers. Firstly, the differential principle is analyzed, and adams is used to establish a three-dimensional solid model of the virtual pro totype of the symmetrical bevel gear differential. Then, constraints and drives are added, and the motion simulation module of the virtual prototype is used to simulate the motion of the differential. Through the analysis of the results of motion simulation, the motion characteristics of each component in the symmetrical bevel gear differential are obtained, and the working principle of the differential can be further understood. [Key words] : Differential gear; adams; 3-D solid modeling; Motion simulation; motion characteristic
基于ADAMS的二级直齿齿轮减速器运动仿真
基于ADAMS的二级直齿齿轮减速器运动仿真本文简要介绍了虚拟样机的含义,并就二级直齿齿轮减速器,利用ADAMS软件进行简单的运动仿真,直观再现传动过程,通过理论计算验证模型的正确与否。
在当今制造业中,传统的经验设计、类比设计和静态设计因为开发周期长、质量差、产品成本高等缺点越来越不适应日益加剧的市场竞争,企业能否对市场做出迅速的响应,生产出最大程度满足顾客要求的高质量低成本产品已成为竞争的焦点。
虚拟样机技术( Virtual Prototyping Technology)的出现为企业提供了行之有效的方法。
虚拟样机技术是指在产品设计开发过程中,将分散的零部件设计和分析技术(指在某单一系统中零部件的CAD和FEA技术)揉合在一起,在计算机上建造出产品的整体模型,并针对该产品在投入使用后的各种工况进行仿真分析,预测产品的整体性能,进而改进产品设计、提高产品性能的一种新技术。
简单的说,虚拟样机技术就是利用CAD软件所提供的各零部件的物理和几何信息,直接在计算机上对机械系统进行建模和虚拟装配,从而获得基于产品的计算机数字模型,即虚拟样机(Virtual Prototype),并对其进行仿真分析。
这种方法使设计人员能在计算机上快速试验多种设计方案,直至得到最优化结果,而且免去了传统设计方法中物理样机的试制,从而大幅度缩短了开发周期,减少了开发成本,提高了产品质量。
虚拟样机技术是许多技术的综合,其核心是多刚体(柔体)系统运动学和动力学建模理论及其技术实现,其关键技术包括工程设计技术、建模仿真技术和VR可视化技术等。
成熟的三维计算机软件有效地保证了虚拟样机技术的大规模推广和应用。
这方面比较有代表性的是美国MDI公司开发的机械系统动力学自动分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)、比利时LMS公司的DADS以及德国航天局的SIMPACK,其中ADAMS最为成熟,已广泛应用于世界各行各业,占据了超过50%的市场销售份额。
车差速器的虚拟设计及齿轮的工艺过程设计【含全套CAD图纸和WORD说明书】
目录1 前言 (1)1.1差速器的概述 (1)1.2差速器的种类及工作原理 (2)1.2.1普通圆锥齿轮差速器及工作原理 (2)1.2.2抗滑差速器及工作原理 (5)1.3 本课题研究的内容 (6)2 奔驰S600Pullman差速器选型 (7)2.1引言 (7)2.2三种差速器的性能比较 (7)2.2.1牵引特性 (8)2.2.2动力特性 (8)2.2.3受力状况 (8)2.2.4驱动轮的磨损 (8)2.2.5通过性能 (9)2.2.6工艺性能 (9)2.3 奔驰S600Pullman差速器的选型 (9)2.4对称式圆锥行星齿轮差速器的结构 (9)2.5对称式圆锥行星齿轮差速器的工作原理 (10)3 差速器的基本参数的选择和设计计算 (12)3.1行星齿轮差速器的确定 (12)3.1.1行星齿轮数目的选择 (12)3.1.2行星齿轮球面半径R的确定 (12)B3.1.3预选其节锥距 (12)3.1.4行星齿轮与半轴齿轮齿数的选择 (12)3.1.5行星齿轮节锥角γ (12)3.1.6模数m及节圆直径d的计算 (13)3.1.7压力角α (13)3.1.8行星齿轮安装孔直径 及其深度L的确定 (13)3.2差速器直齿锥齿轮的几何尺寸计算 (13)3.3差速器直齿锥齿轮的强度计算........ 错误!未定义书签。
3.4差速器齿轮的材料.................. 错误!未定义书签。
3.5行星齿轮跟半轴齿轮的图形.......... 错误!未定义书签。
3.6从动轮与差速器壳联接螺栓计算...... 错误!未定义书签。
3.7十字轴的强度校核.................. 错误!未定义书签。
4 差速器的三维设计.................. 错误!未定义书签。
4.1汽车差速器主要零部件的造型设计.... 错误!未定义书签。
4.1.1行星齿轮建模................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i = 将 ( 3)变换为: nH =
z2 n1 - nH = - = - 3 z1 n2 - nH 1 3 n+ n 2 1 2 2
( 4)
1 1 (n1 + 3n2 ) = 4 2
( 5)
作者简介: 张晋西 ( 1962- ), 男, 四川岳池人, 硕士, 教授, 主要研究方向: CAD /CAM /CAE。 收稿日期: 2008- 8- 19
差速器之所以能实现差 速, 是由于差速器各齿轮之 间满足公式 ( 2), 下面介绍用 直齿轮构成新的差速器, 并 证明它也满足该公式。直齿 轮差速器结构简图如图 2 。 其中, 1 、 2 、 4 和 H 组成 一个差动轮系, 发动机的运 动从变速箱经传动轴传给行 星轮 4 , 带动齿轮 1 和 2 转 动; 1和 2通过齿轮传动把转 速和力矩传递给两半轴 3和 5。设齿轮 2和 1的齿数比为 3, 则直齿差速器差动轮系满足:
H 12
1 普通圆锥齿轮差速器功能与基本原理
对称式锥齿轮差速器结构如图 1所示, r 为车辆转弯时 不同的转弯半径, 2 L 为车两后轮轮距。它由圆锥行星齿轮、 行星齿轮轴、 圆锥半轴齿 轮和差速器壳等组成, 发 动机的转动经变速后传 给差速器的锥齿轮 1 ,最 终由半轴锥齿轮 3 和 5 输出不同的转速。根据 轮系传动比计算理论 , 可以得到差速器传动比 为: z5 n3 - nH H = - = -1 i35 = z3 n5 - nH 即: ( 1)
设计
研究
分析
37
文章编号 : 1002- 6886( 2009) 01- 0032- 02
直齿差速器设计构想与运动仿真
张晋西, 张甲瑞, 郭学琴, 周静
( 重庆工学院汽车学院 , 重庆 400050) 摘要: 本文构想并设计了一种直齿轮差速器, 与传统锥齿轮差速器具有同样的功能, 通过 Solid W o rks /CO M OS M otion 运动仿真, 分 析了各构件的运动特性, 验证了理论推导的正确性, 为汽车差速器的改进设计提供了新的思路。 关键词: 差速器 齿轮 运动仿真 Solid W o rks COS M OSM otion 中图分类号: TP391 文献标识码: A
[ 1]
nH =
1 (n + n5 ) 2 3
( 2)
其中, n3 、 n5 为两半轴即两输出轴的转速, nH 为行星架转速, z3、 z5 分别为两半轴 3和 5的齿数。结合车辆转弯时不同的 转弯半径, 得到两个车轮的转速为: n3 = r- L nH r n5 = r+ L nH r ( 3)
2 直齿差速器原理
Design Sche m e and K ine m atical Si mulation of Spur Gear D ifferential
ZHANG J inx,i ZHANG J iaru,i GUO Xueqin , ZHOU Jing
Abstract : Th is article introduces us a design of spur gear differentia,l which has the sa m e function w ith trad itional bevel gear . So lid W orks/COMOSM otion has been used to S m i ulate and analyzes kine ma tica l features o f every co mponen, t which testifies theory illation s co r rectness and g ives us a new way to m i prove the automob ile differentia.l K eywords : differentia;l gear ; k ine m atical sm i ulation; so lid w orks ; CO S MO S M otion
3 2 1
5 空间交错轴机构改变传动方向
差速器输入运动与输出运动须成 90# 关系。为此 , 可 引入 RCCR 双曲柄机构
[ 4]
, 如图 5 所示 , 它与直齿轮差速
器连成一体 , 改变转矩传递方向 , 它由构件 1、 2、 3 及机架 组成, 含有二个转动副 ( R ) 和二个圆柱副 ( C ), 其中构件 1 和 2、 2和 3 组成两个圆柱副 , 构件 1 和 3 分别与机架组 成两个转 动副。经过对 其仿 真分析, 结果 表明这是一 种 结构简单、 构件少 , 低副结构 耐磨损性好的等角速 回转双 曲柄机构 , 可 应用于空间 交 错轴的等角速传动。
38
现代机械
z5 /z1 = 1/ 2 n3 = 3 n 2 2 n5 = 则有:
H
2009 年第 1 期
令 z3 /z2 = 3/ 2
=
1 n 2 1
( 6)
1 ( 240+ 380) = 310 deg/ sec 2
运行仿真, 得到行星架角速度曲线如图 4所示。 曲线图 显 示 半 轴 3 与 半 轴 5 的 速 度 之 和 等 于 310 deg / sec , 为行星架 H 速度的两倍, 即验证了该轮系满 足差速功能公式 ( 2) 。同样地 , 无论怎样改变两半轴的转 速, 都可以得到它们与行星架 H 满足公式 ( 2) 。
0 概述
差速器是汽车驱动桥的主要部件。它的功能就是在向 两边半轴传递动力的同时, 允许两边半轴以不同的转速旋 转, 满足两边车轮尽可能以纯滚动的形式作不等距行驶, 减 少轮胎与地面的摩擦 。目前, 汽车上广泛应用的是对称式 锥齿轮差速器, 这种差速器全部由锥齿轮组成。本文构想了 一种全部由直齿轮组成的差速器来代替目前广泛使用的锥 齿轮差速器, 在满足使用性能的前提下, 更具备加工性能和制 造成本方面的优势。
将 ( 6)代如 ( 5)则得到公式 ( 2), 由此证明了直齿差速器 也能实现差速功能, 也就是说图 2的设计是可行的。
3 三维建模与运动仿真
本文用 SolidW orks 进行 直齿差速器三维建模如图 3 , 其中, 行星轮 4的齿数 Z4 = 30 ; 中心轮 1的内齿轮齿数: Z1 = 90 , 外齿轮齿数: Z1 ! = 54 ; 中心轮 2的齿数 Z2 = Z 2 ! = 30 ; 取 两 半轴 齿轮 Z3 = 60 , Z5 = 36 。
4 运动仿真
COSMOSM otion是 Solid W orks 的一个外插件, 可用来进 行机械仿真, 它的计算部分内核是著名的多体动力学软件 ADAM S 。它与 SolidW orks 无缝集成, 直接对三维装配体各零 件添加运动、 约束、 力、 碰撞等, 可对机械进行运动和动力仿真 模拟, 用动画、 图形、 数据等多种形式输出零部件的轨迹、 速 度、 加速度、 作用力、 反作用力等运动和动力参数。 在运动分析之前, 必须用各种运动副, 如旋转副, 移动 副, 球面副等将各零件联接起来。装配时添加的各种配合, 将 自动映射为运动分析的约束, 本文用耦合方式模拟轮系的运 转 [ 3] , 可以得到比较流畅、 快速的运动效果。耦合设置中, 主 动齿轮和从动齿轮转动角度之比, 为两轮齿数之比。 如果把行星架视为机架, 所有齿轮相对于行星架转动, 就是一个定轴轮系, 各齿轮相对于行星架的角速度之比, 等于 其齿数的反比。这就是转化轮系计算周转轮系的概念。 中心轮 1相对于行星架的角速度 ∀ 行星 4相对于行星架的角速度 = ( = - z2 /z1 = 30 / 90 中心轮 2相对于行星架的角速度 ∀ 行星 4相对于行星架的角速度 = ( = - z2 /z3 = - 30 / 30 耦合仿真要注意, 必须满足中心轮 1 、 中心轮 2、 行星 4 都有与行星架组成的运动副, 如果没有, 则要添加旋转副, 否则不能设置耦合转动。 设定半轴 3 转速为
6 结论
H
-
H
) / (
4
)
本文构想并设计了直齿轮差速器, 通过 Solid W orks/ COM OS M otion运动仿真, 验证了理论推导的正确性。直齿 轮差速器在结构上与传统的锥齿轮差速器在结构上有较 大区别 , 对汽车差速器的改进设计具有一定的价值。
参考文献
1陈家瑞. 汽车构造 (M ). 北京: 机械工业出版社, 2004 .6 2申永胜. 机械原理教程 (M ). 北京: 清华大学出版社, 2004 . 12 3张晋西, 郭学琴. Solid W orks 及 COSMOSM otion 机械仿真设 计 (M ). 北京: 清华大学出版社, 2007 . 1 4陈辛波, 李晏. 空间交 错 轴等 角速 传动 RCCR 双 曲 柄机 构的 分析 ( J). 上海: 机械设计, 1999 . 5
-
H) /(4-H)
= 240 deg /sec , 半轴 5转速为
1 ( n3 + n5 )可知, 此时行 。根据公式 nH = 5 = 380 deg / sec 2 星架 H 即行星架的角速度应为: