FANUC机器人系统设置
fanuc机器人简单配置

fanuc机器人简单配置机器人简单配置★进入系统菜单→机器人冷启动→然后按住PREV 和NEXT 键★选择 3 Controlled Start→将菜单中的改为ENABLE→单击ENTER★选择 1 Start Setup Wizard→选择Body Shop→选择Spot Welding→选择One WeldControl→选择EtherNet IP→选择Robot Held Gun→选择“YES ”(伺服枪,否则选择“NO”)→选择“YES ”(是否要选择伺服电机型号)→选择“1 ”(选择伺服电机型号)→填入枪的速比(在枪的铭牌上)→填入枪的最大压力(在枪的铭牌上)→填入枪的最大开口(在枪的铭牌上)→选择“C ”&“X”型枪→选择伺服放大器(一把枪选择“2 )→选择是否有温控(根据实际情况)→选择是否有修磨机(标准配置有)→选择修磨机电机型号(根据实际情况)→选择“NO ”(Tip-Dress after Cap Changing)→选择“YES ”(第一次配置时Pressure Table Setup)**配置完成**★选择 2 Set Cell I/O to PLC→选择EtherNet IP**配置完成**★选择 5 EXIT★选择FUNCTION→选择Cold Start★零位设置→MENUS→0→SYSTEM→GUN MASTER→BZAL(清故障)→FUNCTION →0→POWER CYCLE(将编码器复位,否则机器人无法运动)→把焊枪上下电极杆开到相碰按下(该点即为焊枪零位)→SHIFT+EXEC(记入)**设置完成**★初始化设置→MENUS→UTILITES→GUNSETUP→依次按ENTER 键进行一下设定[SET GUN MOTION SIGN] (设定枪的方向)→关枪→按[F5]CLOSE →按[F3]COMP[SET GUN SPACE,MASTER,GUN] (设定枪的基本参数)→在“******”处填入相应参数(在枪的铭牌上找)→关枪至零位→按[F3]COMP[AUTO TUNE] (自动计算一些参数)→按SHIFT+[F3] EXEC (运行过程中SHIFT 必须一直按住)[THICKNESS CHECK CABIBRATION])→按SHIFT+[F3] EXEC (运行过程中SHIFT 必须一直按住)**设置完成**★焊枪压力标定→MENUS →Setup→Servo Gun→选择<*DETAIL*> (第二行)→PRESSURE CAL(ENTER)→YES[Pressuring Time (sec)] = 2.0 加压时间2"[Thickness of Gauge (mm)] 压力计厚度请如实填写[Pushing Depth (mm)] 压入深度,填20mm[Gun Open Value (mm)] 标定时枪口每次张开的大小→尝试输入适当的扭矩值,从低扭矩开始(5% );直到到达匹配的压力→SHIFT-[F3: Pressure]→填入压力值→所有扭矩测量完毕后点击-[F3: comp] (把光标移到CALIBRATION STATAS)→执行程序菜单选择TW-SETG1 宏程序(看TIP WEAR STANDRD 变成COMP)**设置完成**★机器人I/P 地址设置→MENUS→SETUP→[FI] TYPE→下页→下页→HOST COMM →DETAIL★焊机I/P 地址设置→MENUS→I/O→[FI] TYPE→下页→ETHERNET I/P→选择W ELD CONTROL→CONFIG(必须在FALSE 状态下,否则把TURE 改成FALSE)填入以下内容Vendor ID:270D e v i c e T Y P E:12P r o d u c e c o d e:1I n p u t s i z e:1O u t p u t s i x e:1R P I:32A s s e m b l y i n s t a n c e(i n p u t):100A s s e m b l y i n s t a n c e(i n p u t):150★DEVICENET 通讯设置→MENUS→I/O→[FI] TYPE→下页→DEVICENET→选择(82)F4(DETAIL)选择波特率500 再ONLINE→[F3] DIAG→[F3] BROWSE(必须在ONLINE 状态下,光标移到63 上,波特率为500)→机器人自动查找→QUERY →POLL→ENTER→ADD-SCAN→ADD-DEF→重启(机器人配WATERSA VER)★同种方式配置其他模块HOME★将机器人示教到相应位置★在寄存器中记入位置值→MENUS→SETUP→下页→REF POSITION→DETAIL→SHIFT+RECORD★在位置寄存器中记入位置值→MENUS→下页→DATE →下页→POSITION REG→选择P R[1] →SHIFT+RECORD(HONE 点尽量做到机器人姿态自然,便于打点,不与任何物体干涉,各轴转动范围在±180 以内。
FANUC机器人修改设置的内容

FANUC机器人修改设置的内容一、介绍FANUC机器人是一款广泛应用于制造业的自动化设备,其高效、精确和可靠的特点深受广大用户的喜爱。
然而,为了使机器人在实际应用中更好地适应各种不同的工作环境和任务,我们有时需要对机器人的设置进行修改。
本文将详细介绍在FANUC机器人上修改设置的内容以及相关的步骤。
二、修改设置前的准备工作在进行任何设置修改之前,用户应首先确保自己具备足够的机器人知识和相关的安全操作经验。
还应注意以下几点:1、备份原始设置:在修改设置之前,建议先备份机器人的原始设置,以防止误操作导致的问题。
2、了解机器人的工作原理:在进行设置修改之前,建议用户深入了解机器人的工作原理和结构,以避免因不合适的设置导致的潜在问题。
3、遵循操作指南:在进行任何设置修改时,应始终遵循FANUC提供的操作指南和安全规范。
三、修改设置的步骤1、进入设置界面:通过控制面板或远程连接方式进入机器人的设置界面。
2、选择修改项:在设置界面中,根据需要选择要修改的项。
例如,如果需要修改机器人的运动模式,则需要在设置菜单中找到“运动模式”选项。
3、修改设置:选择要修改的设置项后,根据界面的提示进行操作。
例如,在修改运动模式时,可能需要选择新的模式并确认修改。
4、保存设置:完成修改后,务必记得保存所做的更改。
5、验证修改:为了确保修改的设置已生效,建议在安全的环境下进行测试验证。
四、常见设置项及修改建议1、运动模式:根据应用场景的不同,用户可能需要调整机器人的运动模式。
例如,对于需要高精度定位的应用,可以选择“精密模式”以提高定位精度。
2、速度与加速度:为了提高生产效率,用户可能需要增加机器人的移动速度或加速度。
然而,过快的移动速度可能导致机器人出现震动或不稳定现象。
因此,在修改这些设置时,建议先进行速度和加速度的逐步增加,并观察机器人的反应以确保稳定性。
3、传感器设置:对于依赖传感器进行定位或避障的机器人应用,用户可能需要调整传感器的设置。
FANUC机器人参考位置功能介绍与设定方法

设定过程中出现异常提示
问题原因
可能是由于设定步骤错误、系统参数 设置不当或硬件故障导致。
解决方案
根据异常提示信息,检查设定步骤是 否正确,核对系统参数设置。如果问 题依旧存在,可能需要联系技术支持 进行排查。
应用价值评估
提高生产效率
通过设定合理的参考位置,可以 优化机器人的运动轨迹,减少无 效行程,从而提高生产效率。
降低维护成本
精确的参考位置设定可以减少机 器人的磨损和故障,降低维护成 本和停机时间。
增强产品品质
高精度的位置控制有助于提高产 品的加工精度和一致性,从而提 升产品品质。
未来发展趋势预测
参考位置功能可以帮助机器人快速定位到关键路径点,减少路径规划的
计算量和时间。
03
多机器人协同
在多机器人协同作业的场景中,各个机器人需要共享位置和姿态信息。
通过设定参考位置,可以实现多机器人之间的快速定位和协同运动。
相关术语解析
• 参考位置(Reference Position):在FANUC机器人中,参考位置是指用户设 定的一个或多个特定的机器人位置,用于后续操作中的快速定位或路径规划。
FANUC机器人参考位置功能 介绍与设定方法
目 录
• 参考位置功能概述 • 参考位置类型及特点 • 设定方法与步骤 • 常见问题与解决方案 • 案例分析与应用实例 • 总结与展望
01
参考位置功能概述
定义与作用
定义
参考位置功能是FANUC机器人中的一项重要功能,它允许用户设定一个或多个 特定的机器人位置作为参考点,以便在后续的操作中进行快速定位或路径规划。
FANUC发那科工业机器人系统基本参数设定

维修培训实习教材第二节基本参数设定一实习目的(一)掌握FANUC 数控系统的参数输入方法(二)掌握FANUC 数控系统的参数设定步骤(三)掌握机床运行所需要设定的最基本参数二实习内容学习“参数设定支持画面”中每一项的设定三实习步骤有关参数设定的说明:对于FANUC数控系统,其参数的数目是很大的,想对每一位参数都进行掌握和设定是很困难的。
事实上,对FANUC数控系统参数,并不是需要对其输入某个数值才称之为设定参数。
大部分的位型参数,设为0时反而是有效的,设为0反而是很多机床默认的习惯状态。
这点在进行参数学习时要清楚。
具体步骤:(一)系统通电,将“参数可写入”开关打开。
- 1 -(二)系统断电,重新开机,开机的同时按住[RESET]功能键直到系统进入正常画面,其结果是系统参数被清除,但系统功能参数(也叫保密参数)(NO.9900-9999)不被清除,如果是新版系统,系统功能参数(也叫保密参数)存在于系统软件中,也不会被清除。
所以,此项操作仅会清除系统功能参数(也叫保密参数)之外的普通参数(三)按[SYSTEM] 功能键,然后按扩展软键[+]几次,直到出现参数设定支持画面的软键[PRMTUN] 。
进入参数设定支持画面(按软键[PRMTUN])。
按此键几次,出现下图中的软键[PRMTUN]- 2 -参数设定步骤和内容画面中的项目就是参数的设定调试步骤。
这次着重学习第一项“AXISSETTING(轴设定)”项和最后一项“MISCELLANY (其它)”项,参数设定支持画面里的其他项(伺服参数设定,主轴设定等)将在别的课时里学习。
(四)按照顺序设定这两项参数。
第一项:AXIS SETTING(轴设定)项,轴设定里面有以下几个组,对每一组参数进行设定。
(BASIC(基本))组:有关基本设定的参数。
组参数号简述设定说明- 3 -基本1001#0 直线轴的最小移动单位0:公制(公制机床)公制机床设定为01002#1 无档块参考点设定1004#1 设定最小输入单位和最小移动单位。
最新FANUC机器人系统设置资料

3.8.1 机器人启动请求(RSR ) 设定RSR操柞3-S 设定R s R 步骤1 拒卜[MENU ]〔-吳跟'键.显亦出岡間黑单2 逸岸"6吐登”-3 U 5 "叢型”.GL 示HliH 血切换录单:4 進择“选悴伏序1 出恥林序込择山恥 5皙肚柿半向4外FiiM 取式-某據卜F d” i+f - R y R "・按卜卜3 •'科.细"• t 翼心选出剛E. F3S.43PSR 设■首面(ifffl )MMHER 段,RSttl 程序■号 RSH2程.于骗号 RSR3祁巧第号 RER4秤字編号 RSK&程.爭鼎号 RSA6和亭箱号 RSR7程手馆号KSRS 秤宇娠号 宇符率解嫌 基歡确iM ;(号煉冲宴反k 狄右6:再尢林南冋忡h 请n.箍人鱼.7 在踐变了程申暹释方式的情北卜.羁険设定右边*倍赛种时断开电理,能后揖播通电馮机器人10配置3+机器人系统的设定•机架机昵聚把LO K 块的神美. • o -处理13印轉电蜡权、roil 煙设备连槎星兀• e M - IO Utut-MODEL A B • 32 = VO itfttiiS 从机崔 2 •48 = R JOrB Mdle 的上般化RMAmtlMAJ 可・插槽描艳宗描%总杭架的IQ 樓块曲涓号“ • 便用ttavo 印剧电甜扳、DQ 连接设备连接皐兀时・按谨接的■序为插AM. 2..… • 便用I/OUmt-MODELA 时*崟魁白F3模块的擢本单尤的轴怕号为谕樓块郴«1笛・- 便用I/OUhit-MODELBB^况卜.通过臬牛軍元的DB 开关设定的雏元端号,即为谨基本单兀的掩特值 • LO jl4£r^&K 'XJEI ]- RJ&B Mate -!j±|?tfrRMAT5 CFLMAlSlP.汽忙费璋力 I・ 物理嵋号ftstt 号ififliMo 耦块内前信号歸号*技如下所示方式託壷谨村斤顒号 • 掘宇愉人悄号ini. in2... • 故字新自信号:wt 1, oui2. > . • 権用曾入仃弓ninb Jtn2... • amnl. acnji ;...用卅用用用川用用旧剧Hfi 旧efi启】【12]1( 21] ][331 t491 ][W ] ][£0] ]f 70] ][W] 血幻 t t>] [£A ] [4MJ为了在机■人控制装■上对to悄号临进1?技创・盘裁建湮伫巧和週圳信号的養联-琲建,这先莊称惟to井配+RACK (机架)机轧系特10權块的种类*-SLOT (靖槽)插常薦指柿虑議架的跑慕堆部件的号码.•开始点幵号纜的映射而擀枸用号硏仆配龄理牡号硏“穗宦谨脅加的圳M的构幵号码,操作3 1数字】o的分配筋摄1 f4 b LMENtL (震4 I 也出心;'I 艾生2 J MITUT・J 摊卜Fl-类■甩界出恆血口利汇片.4 遇择“散字_・数宁I/0—览画面I/O数字输岀#1234 5 67S9 rL rL- rL- r* fL- fl rl r- _L DODODODOg W 杰光关关爰董关关关关[娄型J 分配:N/OUT 开关5要进行输人闻Ift和辆出阿*1的切换.按下F 3 * I N / OUT B,6 耍进仃LOffJ分配,按卜F 2 ”分配“ a姿返已到一坦画面,抹卜F 2 览“ e取宇I/O筍出黄节1常t IZJ 鞄憎机絮am开始点如1 DO(1- 2&)D121JLCTIV2 DO121 512100UNASQ【类理-ffi IN/OUT帑助■7 I/D ftSiam的掩fl:1 将叱抹怡向范阳.输入进厅分配的倍码蒂岡42.袒据Mlffc入的加I払门功分卅疔.丄RACK. SLOT. H tl'i.H.中愉入适亠的血.4 输h F;商的伎訝.我QI%不出PtN口・港定衍逞的情况下*狀窓中忌示出INVAJ疗在不荒叮的抒的情况下,按TF4 (设疋淸锻)就删陶厅.'STAT ^ 的含bW*Acnv当曲正峻用漫灯配・PEND L.正朋井配.书石逋由H.成为ACTTVINVAL段定有堤斗UNASG尚屯裁廿札.PMC 已邇过PMCi£?r^配.无认f「此画丽上ilf丁变鯉+S 按下F2 “一览”犍・返冋到一览LEtii面.I/O数字输出[数宇倍号1 ][数字伯号2 1[數字僧号3 ]【數字僧号4 1 9 耍进汙IO属件的设氢按下NEXT (下页丨.再按下一页上的F4龍详细”.关节10%^uuuu〔类型]分配IN/OUT 开关#12 3 4I敷字I/O输出轴1«端口惮轴L/3数字输出¥[ 1]1注称;[]2极性:遇常$互补;无姣T 1- 211类型] 上一步下一步数字1O乾返冋一醫国面.崔卜PRE V滞10要输入注聲a 将才:标的呦利注释d ti卜ENTER (i&X) tif .b 赴择地弔单词*匪文字母n< 按下诂告的珂栽谜*檢入汁释"d 泣释曙入完启.按下ENTER11要设定篆冃.将光标捋问设定栏,妊择功能犍集单.n 扶进片下-个戏宇LO徂的贡定・按卜FX - F —步”・13设盂聒朿看.按下PRIV氓.返冋员闯薪I/O数学输出其节10*14婆忡说沱和垃.币新迪申。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
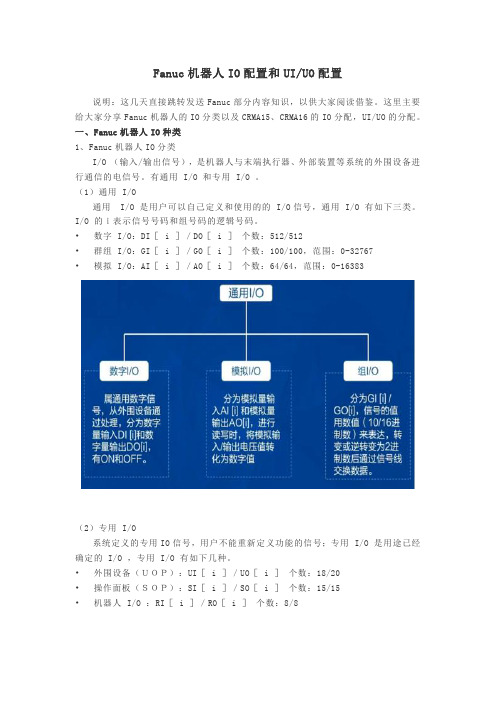
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
fanuc机器人使用三点示教法设置用户坐标系的具体步骤
fanuc机器人使用三点示教法设置用户坐标系的具体步骤1.引言1.1 概述概述部分的内容:在现代工业生产中,自动化技术的应用已经成为提高生产效率和质量的重要手段。
FANUC机器人作为自动化领域的重要装备,被广泛应用于各种制造环境中,为企业带来了巨大的效益。
设置用户坐标系是FANUC机器人编程和操作中非常重要的一项任务。
用户坐标系是机器人在工作空间中进行规划和控制时的基准坐标系,通过设置和使用适当的用户坐标系,可以有效地对机器人进行定位和操作。
本文将介绍FANUC机器人使用三点示教法设置用户坐标系的具体步骤。
三点示教法是一种常用的设置用户坐标系的方法,通过确定机器人末端执行器在三个不同位置时的坐标值,从而确定用户坐标系的原点和方向。
在接下来的章节中,我们将详细介绍三点示教法的概述以及设置用户坐标系的步骤。
通过深入了解和理解这些内容,读者将能够正确地进行用户坐标系的设置,并更好地应用FANUC机器人进行工作任务的规划和操作。
同时,本文的结论部分将对所介绍的内容进行总结,并展望未来在FANUC机器人设置用户坐标系方面的发展趋势。
希望通过本文的阅读,读者们能够对FANUC机器人的用户坐标系设置有更深入的了解,进一步提升自己在自动化领域的专业技能和实践能力。
1.2文章结构1.2 文章结构本文将介绍关于使用三点示教法来设置用户坐标系的具体步骤。
文章主要分为引言、正文和结论三个部分。
在引言部分,将对本文的概述进行说明,简要介绍三点示教法的背景和作用。
同时,还会讨论文章的目的,即解释为什么需要使用三点示教法来设置用户坐标系。
在正文部分,首先会对三点示教法进行概述,详细解释其原理和应用场景。
然后,将逐步介绍设置用户坐标系的具体步骤。
这些步骤将包括从机器人示教器上选择示教点的方法,将示教点与基准坐标系相对应的过程,以及最终确认用户坐标系的操作过程。
每个步骤都将详细说明,并提供相应的代码示例和图表辅助说明,使读者能够清晰地理解和操作。
fanuc机器人工具坐标系设定方法
fanuc机器人工具坐标系设定方法FANUC机器人作为工业机器人领域的领军品牌,其工具坐标系的设定方法是机器人使用过程中非常重要的一个环节。
下面就围绕“FANUC机器人工具坐标系设定方法”展开阐述。
一、FANUC机器人工具坐标系的概念在FANUC机器人系统中,工具坐标系是一个与机器人末端执行工具紧密相连的坐标系。
在机器人编程时,指定机器人执行任务的坐标系为工具坐标系。
而对于不同类型的工艺和不同的末端执行工具,需要设置不同的工具坐标系。
这样才能保证机器人的运动精度和稳定性。
二、设定FANUC机器人工具坐标系的步骤1. 将末端执行工具安装在机器人上,线缆连接正常;2. 打开机器人的控制面板,进入“MAINTENANCE”,再进入“POSITION SETTING”,然后选择“TOOL SETTING”;3. 进入“TOOL SETTING”界面后,对机器人末端工具的姿态进行设置。
首先,选择“DEFINE TOOL”按钮,然后选择末端执行工具的类型(如夹具、手持式工具等),并填写相关的工具信息;4. 进入到“TOOL DATA INPUT”界面,要对机器人末端执行工具相对基准点的坐标进行设定。
坐标系原点应该在基准点上,横向为坐标系X 轴,纵向为坐标系Y轴,垂直为坐标系Z轴。
根据实际情况,可以通过PULSE GENERATOR或THREE POINT方式测量基准点坐标值。
选择完毕后点击“ACINPUT”按钮进行保存;三、注意事项设定工具坐标系时需要注意以下事项:1. 确保机器人末端执行工具与机器人正常连接,线缆连接正常,并对工具信息进行实际测量和输入;2. 坐标系原点应该在基准点上,横向为坐标系X轴,纵向为坐标系Y 轴,垂直为坐标系Z轴。
而且,在三次坐标(如显微镜百分表)的情况下,需要进行坐标系旋转的校验,确保坐标系的精度和合理性;3. 在设定之后也要进行校验和测试,确保设定的坐标系与实际情况相匹配。
如果坐标系存在偏差,需要及时调整并重新设定工具坐标系。
fanuc常用参数
fanuc常用参数Fanuc是世界领先的工业机器人和自动化解决方案供应商之一。
它的机器人和控制系统在许多行业中被广泛应用,包括汽车制造、航空航天、电子制造、金属加工等。
Fanuc机器人的参数设置对于机器人的正常运行和性能优化非常重要。
下面是几个常用的Fanuc机器人参数以及它们的参考内容。
1. RSPD - 机器人运行速度RSPD参数定义了机器人的运行速度,通常以百分比表示。
可以根据实际的应用需求来设置该参数。
例如,对于需要快速操作的任务,可以将RSPD设置为较高的值,以提高机器人的运行速度。
但是需要注意的是,过高的速度可能会导致机器人在操作过程中产生过大的惯性力,导致精度降低或者机器人移动不稳定。
因此,在设置RSPD时需要找到速度和精度之间的平衡点。
2. JVEL - 关节速度JVEL参数定义了机器人每个关节的最大速度,通常以度/秒为单位。
可以根据机器人结构和任务要求来设置该参数。
例如,如果机器人某些关节的负载较大或者受到了限制,可以降低JVEL以减小关节的运动速度。
另外,较低的JVEL值也可以用来提高机器人的运动平稳性和控制精度。
3. ACC - 加速度ACC参数定义了机器人的加速度,通常以度/秒^2为单位。
加速度决定了机器人在开始和结束运动时的速度变化率。
在设置ACC时,需要根据机器人和任务的特点来选择。
较小的加速度可以提高机器人的稳定性和精度,但是可能会导致运动速度过慢。
相反,较大的加速度可以加快机器人的运动速度,但是可能会对机器人结构和控制系统造成较大的负载。
4. RCTR - 机器人模式RACT参数定义了机器人的工作模式,常见的有Auto模式和Manual模式。
在Auto模式下,机器人将按照预先设定的程序执行任务。
在Manual模式下,机器人可以手动操作,例如通过操纵杆或者外部控制台进行控制。
根据具体的任务需求,可以调整机器人的工作模式。
5. ZONE - 动作平滑度ZONE参数定义了机器人在运动过程中的平滑度。
(完整版)FANUC机器人基本操作指导
FANUC机器人基本操作指导1.概论----------------------------------------------------------------------------------------------------------- 1 1)机器人的构成------------------------------------------------------------------------------------------- 1 2)机器人的用途------------------------------------------------------------------------------------------- 1 3)FANUC机器人的型号-------------------------------------------------------------------------------- 12.FANUC机器人的构成--------------------------------------------------------------------------------- 1 1)FANUC机器人软件系统------------------------------------------------------------------------------- 1 2)FANUC机器人硬件系统------------------------------------------------------------------------------- 2(1). 机器人系统构成------------------------------------------------------------------------------ 2(2). 机器人控制器硬件--------------------------------------------------------------------------- 23.示教盒TP------------------------------------------------------------------------------------------------- 2 1)TP的作用------------------------------------------------------------------------------------------------- 2 2)认识TP上的键------------------------------------------------------------------------------------------- 3 3)TP上的开关---------------------------------------------------------------------------------------------- 4 4)TP上的显示屏------------------------------------------------------------------------------------------- 5安全操作规程 5 编程 6 1.通电和关电------------------------------------------------------------------------------------------------ 7 1)通电-------------------------------------------------------------------------------------------------------- 7 2)关电-------------------------------------------------------------------------------------------------------- 7 2.手动示教机器人----------------------------------------------------------------------------------------- 7 1)示教模式-------------------------------------------------------------------------------------------------- 7 2)设置示教速度-------------------------------------------------------------------------------------------- 8 3)示教-------------------------------------------------------------------------------------------------------- 83.手动执行程序---------------------------------------------------------------------------------------------84.自动运行----------------------------------------------------------------------------------------------------9一.概论1.机器人的构成是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图12.机器人的用途Arcwelding(弧焊),Spotwelding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接.测量等.3.FANUC机器人的型号主要型号:型号轴数手部负重(kg)M-1iA 4/6 0.5LR Mate 200iC 6 5M-10iA 6 10(6)M-20iA 6 20(10)R-2000iB 6 210/(165等)M-710iC 6 50/(70,20)二.FANUC机器人的构成1. FANUC机器人软件系统Handling Tool 用于搬运Arc Tool 用于弧焊Spot Tool 用于点焊Sealing Tool 用于布胶Paint Tool 用于油漆Laser Tool 用于激光焊接和切割2. FANUC机器人硬件系统1)机器人系统构成(见图2)2)机器人控制器硬件(见图3)三.示教盒TP1.TP的作用图2图31)点动机器人2)编写机器人程序3)试运行程序4)生产运行5)查阅机器人的状态(I/O设置,位置,焊接电流)2.认识TP上的键(见图4)图4新版彩色TP,如下图3.TP 上的开关(见图5)图5(表1)TP开关此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.8.1 机器人启动请求
(RSR ) 设定RSR
操柞设定RS R
1 披卜〔MENU][能单,锻,耳亦出餅山I 叢单“
2 逸甘"fi 哉醴”・
J 捋FF1 •黄列毘示出構面训抱求单. 4 aft -attft 序”・岀现律序选择❷尚.
5 将Jt 标拒问"「F 炼择摸式“荼口■拽卜卜‘ i -徙择・.進择.捲下卩岁・板・・t 程序鶴择・血亠
3.3.4>
1 RSR1秽尺嵋号 3 RSR3軒序帽号 * K5R4柠序塢号 & RSfc5 刚専
6 3SM 禅應塢号
7 RSK?也序箱号
H R5RS 柠甲塢号 » 字
捋串前炼
10
is
MU *号耳冲%«(««)
& 卸I 萍指燈人也
7锂占变了程序暹掙丹式的悄总九 娈使谡定有聂・in 整骨时斯开褪證,ftjgmsi 电賂
机器人IO 配置
3.机器人系统的设定
机蜓
机蹩系葩IX )帳决的种弟. • o -处理10目】料|也埒权,roil 寰虎寻連■專兀 • 15
= LOUnir MODEL AB
•
52
- IQ 連瘫肚各从机搖U
« 4£
= K 30rH Mata ff]丄板工 RMAI5,1'RMAl 耐
-插槽
轴皑衆捐喲葩H 垃轮I 口姿块的編号” • 便用牡登PQ 印剧电酣乐財0连接设备谨接单元时+按连接姑昵扌为播權1、2-..-
• 便用I/O Umt-MODEL A 时.安兹有FO 模块的華本单朮的插槽编号沟谱理垠的幅槽仙<
•
便用LODiHt>W>DELE 的悄况卜.禅过推本单尤的IHP 开关彼定的单尤S ;号・即为谏蔓本单托的插憎值 v I ;□连按 址备*A 机接 | 、 R-f-OfBMste ^: J.^(CFLMA15 CRAIA[6) |-.谥值岳第为 I
物理编号
刿I ■:和 朮斗I 门呻7 帕悄号歸号 按如下所爪方式X 「£制.叩博: • 程字输人匸号in K mZ... • 枚宇唏自倩号:omi. our?,. + 啞抑知人仁:.;■ ain I. Ain 2. + 瞬推琲㈣仁号,Acntf 1 . nmii2.
为了住机囲人矢利装宾上刃〔心性弓汽HH 亍揑制.戒顾IT 內僅件号和世州怡巳的去联 旳班“诂 壬底称H LO »电- 越农口功建和丄o 舒豐“
-R.4C K (机架)
机峯崇惜匸0厘坟的沖类、
SLOT (播樽)
荊惜董摂枸建机眾的vo 犍块誌件的号轲.
・开始点
TTW?沟诜行悄号统的映射而将将理号硏対b 劭逼羯号稿
指定谁舟MR!用初的■瑞号丹
2
心心.
H
启心
操作3 1数字I/O 的分配 步骤
1按下[MENU ](菜单》況•显示出此向菜单•
2 Aft -5LO".
3 按KF1 ••类5T • SL 示出蓟面切検菜妙.
4
atn -»字-•
数字I/o —览画面
[类型] 分配 IN/OUT 开 关
5 耍进行输入画面和输出㈣面的切换.按下F3 “IN/ OUT”。
6
嘤进彳丁 I/O 的分配,按卜F 2 ••分配” o 耍返回到一览画面,按卜F 2 "一览” o
数字I O 分配画面
f
范31
机架插槽开始点状态
1 DO ( 1- 20] 0
2 DO (21-512)
7 I/O 配置画面的按作
1俗光标捋向范用・输入逬厅分配的信号范用。
2. 根据所输入的范曲.门动分配行。
3.
<L RACK. SLOT 、开始点中输入适当的值.
4 输入正确的值时.状态中昱示出PEND. 设定<li 吴的情况下.状态中品示Hi DJVALo
存在不需娈的行的情况下,按下F4 (设定淸除)就删除行. “STAT.”的含义如卜所示・
ACTIV 当配正使用该分配.
PEND 己正碓分配°帀筋通出的成为ACTIV “ INVAL 设定有供. UNASG 尚未枝分
PMC 已通过PMC 进片分配.无比⑷而上进厅殳更.
I/O 徽字■出
关节30*
[ J [ J [ J ( 1 [ J ( J [ J ( ] [
]
#123456789 DODODODOgDODODOg
拟
模 UUUUUUUUU
瞟关关关关关关关关
21 ACTIV
0 UNASG
【类型】 一览 IN/OUT
ffi(除 帮助
8 按下F2 “一览”犍,返回到一盼画面。
I/O 数字输出
9 要进行I/O 属性的设定,按下NEXT (下页),再按下一页上的F4 U 羊细” •
敷7 I/O 愉岀 关节10%
蜿口怦地
1/3
数卞输出:
(1]
1注駅[ 2 极
性: 3互补:
通常 无效
【
]
―2 】
数字1O 详细画面
麼返冋一览国面.按卜PREV tt >
10夏输入汶释
a 将光标楼动御注释仃.按
b ENTER (输入〉 b 迭择使用单词.英文字母.
c 按下适肖的功能谨.输入江佯q
d 注释轮入完后.按F ENTERS
11要设定条冃.将光标指向设定栏.选择功能键菜单.
12要进行下一个数字I/O 徂的设定.按FF3 “下一步” • 13设定结束厉.按FPREV 进.返冋•览画面.
V0数字■出
关节IX
范因
机架 插槽 3/32 开
始点
1 DO :1- 8] 0 1 21
2 DO ^-16] 0 1 29
3 DO 17-241 0 1 37 4
DO 25-32]
0 2
1
淡型] 一览
IN/OUT
剧除 杨助
14些便设宦台效.哦新通电。
关节10%
DODODODO
12 3 4
拟
«uu u U
态关关关关
状
[数字信号 1 ] [数字信号 2 ] [数字佰号 3 ] [数字信号4 】
[类型] 分配 IN/OUT 开 关
4.1.1 程序名
便用程序名来区别/rtfi/TF?制热Z?内的存储離中的几个丹序・在相同柠制釆百内不旋创连2个以卜相同名称的斤序.
长度
昱序名的长度为1〜8个字符。
捏序名相对程序必须足独•无 *
可以使用的字符
字符:英文字母(仅皿大写字毎〉• 数字:0~9 •程庠名不可从数字开始。
记号:仪很(下划扯〉•不可使用@(@符号)相* (星号).
不能使用的程序名
不能使用以下的程序名.
CON. PRN. AUX・ NUL.
COMI. COM2. COMS. COM4. COMS. COM6. COM7. COM& COK£9.
LPT1. LPT2・ LPT3・ LPT4. LP". LPT6. LPT7. LPT8. LPT9e
内容
秤序必须以能够弄zftnn的和功能的方式进行命名
长度
槿疗注解的K麼为1〜16伞字符.
可以使用的字符
字符乂英文字母(大写字小写字母》.标点符号. 数字:0-9.
记号_《下划线).@(@符号》.*《星号)•
内容
程序注解必刃以能够弄消程序的LJ的和功能的力式退行插述.。