乐高NXT手动六档变速箱
NXT 编程手册
购入后如要转卖给第三方,请务必事先与我公司联系。
模组型高速多功能贴片机NXT编程手册本机器手册包含下列内容。
NXT安装手册NXT系统手册NXT机械手册FUJI智能供料器使用手册NXT编程手册为了您能安全高效地使用本机器,请仔细阅读以上手册,并遵守上面记载的步骤及注意事项。
请将手册放置在机器附近,以便使用时能立即浏览。
QD025-00著作权本手册的著作权属于富士机械制造株式会社所有。
未经本公司同意,严禁任意复制和转载本手册中的部分或全部内容。
商标保证和责任本公司对在使用富士产品的时候,由于没有使用纯正的富士公司所生产的零部件制品,或者由于使用者的不恰当的设定以及不合适的使用环境而所产生的结果及其所造成的影响不负任何责任。
注意事项· 本手册中的内容在没有预告的情况下,有进行变更的可能性。
· 本手册中的内容在编写时虽力求精益求精,万一有错误之处敬请和本公司联系。
· 除了因本公司制品所引起的故障以外,本公司对于使用本手册的结果及其所造成的影响不负任何责任。
QD025-00目录目录1. Fuji Flexa与NXT机 (1)1.1 序言 (1)2. Job编制器 (3)2.1 序言 (3)2.2 创建Job的基本操作方法 (3)2.2.1 从修改已有Job开始 (3)2.2.2 从手动输入顺序数据开始 (3)2.2.3 从导入Centroid CAD数据开始 (4)2.2.4 从导入CCIMF数据开始 (4)2.2.5 从导入MCSIMF文件开始 (5)2.2.6 从导入Allegro CAD数据开始 (5)2.2.7 从导入Mentor CAD数据开始 (6)2.2.8 从导入CR5000(PWS/Board Designer) CAD数据开始 (6)2.2.9 从导入OrCAD CAD数据开始 (7)2.2.10 从导入SFX-J1 CAD数据开始 (7)2.2.11 从导入Specctra CAD数据开始 (8)2.2.12 从导入PowerPCB CAD数据开始 (8)2.2.13 从导入PanaCAD数据开始 (9)2.3 NXT的设定方法 (10)2.3.1 将当前Job的生产线设定更改为NXT机的生产线设定 (10)2.3.2 将NXT机添加至Job (10)2.3.3 编辑NXT机的Configuration数据 (11)2.4 生产线平衡 (17)2.5 优化 (18)2.5.1 在Job编制器中进行优化 (18)2.5.2 Dual Job Optimize (18)2.6 生成报告 (20)2.6.1 手动生成报告 (20)2.6.2 在保存Job时自动创建生产程序 (20)3. 元件数据 (21)3.1 序言 (21)目录QD025-003.2 元件数据 (22)3.2.1 元件数据详情 (22)3.3 Shape Data (24)3.3.1 Shape information详情 (26)3.3.2 形状过外形程详情 (29)3.4 Package Data (33)3.4.1 Package information详情 (33)3.4.2 Package process详情 (34)3.5 关于P_pattern (36)3.5.1 NXT机可使用的P_patern (36)3.5.2 NXT机无法使用的P_pattern (37)3.5.3 P_pattern详情 (38)3.5.4 P_Pattern选择表 (43)3.6 Vision Type详情 (45)3.6.1 关于元件基准点 (45)3.6.2 NXT机Vision Type 输入说明 (46)3.7 同已有PD之间的兼容性 (60)3.7.1 原因 (60)3.7.2 已有机种的Vision Type和NXT机的Vision Type对照一览表 (61)3.7.3 设置元件数据的“Override” (66)4. Job传输 (67)4.1 序言 (67)4.2 传输 (68)4.2.1 从Job创建器传输Job (68)4.2.2 拖放Job以进行传输 (68)4.2.3 使用[传输]指令进行传输 (69)4.3 基本操作方法 (70)4.3.1 更改当前Job (70)4.3.2 从机器中删除Job (70)5. Fujitrax与NXT (71)5.1 序言 (71)6. Fujitrax Verifier (73)6.1 序言 (73)6.2 必需条件 (73)QD025-00目录6.2.1 安装和运行Central Server (73)6.2.2 在Fujitrax的生产线结构中添加NXT机 (73)6.2.3 NXT机的Fujitrax configuration设置 (74)6.2.4 Kit Handy access的用户注册 (75)6.3 将供料器和料卷进行关联 (76)6.3.1 ID创建方法 (76)6.3.2 快速检验的执行方法 (76)6.4 进行供料装置检查 (78)6.4.1 使用Kit Handy (78)6.5 供料装置状态检查 (79)6.5.1 使用Kit Manager时 (79)6.5.2 使用Kit Handy时 (79)6.6 在生产中补给元件 (80)6.6.1 更换供料器 (80)6.6.2 料带拼接 (80)7. 用语表 (83)7.1 英文、数字 (83)7.2 拼音:B (83)7.3 拼音:C (83)7.4 拼音:D (84)7.5 拼音:F (84)7.6 拼音:G (84)7.7 拼音:H (85)7.8 拼音:J (85)7.9 拼音:L (86)7.10 拼音:M (86)7.11 拼音:Q (86)7.12 拼音:R (86)7.13 拼音:S (86)7.14 拼音:T (87)7.15 拼音:W (87)7.16 拼音:X (87)7.17 拼音:Y (88)7.18 拼音:Z (88)目录QD025-00 MEMO:QD025-00关于本手册关于本手册本手册介绍Fuji Flexa和Fujitrax的操作方法,以及有关NXT机的元件数据的详细情况。
004 机动玩具变速箱设计
(5)工作可靠和寿命长 缺点: (1)对制造和安装精度要求较高,成本高 (2)精度↓时 → 噪声和振动↑ (3)不宜用于中心距较大的传动
实用示例 内燃机中齿轮的应用
车床传动机构
车床主轴传动系统
车床溜板箱换向机构
齿轮变速机构
直齿
人字形齿轮
非圆齿轮
– 对执行机构所需主动件的转速、部位已有比较明确的要求, 以确定变速箱的输出轴位置、转速,从而为变速箱传动级数、 结构形式等设计要求确实明确的。
– 对玩具的动作顺序、相互关系易有 比较明确的要求。
第4章 机动玩具变速箱设计
• 4.2玩具变速箱设计的内容与步骤 • 设计内容与步骤
(1)选择原动件的形式与规格 (2)传动系统设计 1)计算机芯的总传动比。在已经确定了执行机构的
1.齿轮传动
3)齿面胶合 在高速重载传动中,常因啮合温度升高而引起润滑失 效,致使两齿面金属直接接触并相互粘联。当两齿面 相对运动时,较软的齿面沿滑动方向被撕裂出现沟纹 这种现象称为胶合。
预防:适当提高齿面硬度,降低表面粗糙度,低速传 动采用粘度大的润滑油,高速传动采用采用含抗胶合 添加剂的润滑油。
第4章 机动玩具变速箱设计
• 玩具变速箱常用传动机构 • 齿轮传动与轮系传动(优点)
– 能保证瞬时传动比恒定,传动平衡性好,传递运动准确可靠。 – 传动效率高,一般为0.96~0.99 – 传递 – 结构紧凑。齿轮传动比带传动、链传动所需的空间尺寸小。 – 工作可靠,寿命长。设计制造正确合理、使用维护良好的齿
某一圆上的比值规定为标准值, 即模数m。
齿轮互换参数?
1.齿轮传动
齿轮的失效形式主要有一下五种: 1)齿轮折断 一般发生在齿根部分 原因:齿轮受力时齿跟弯曲应力最大,而且应力集中。
乐高机器人用户手册NXTUserGuide

超声波传感器
通过超声波测量距离,常用于 避障、定位等场景。
触碰传感器
检测物体的接触或按压,常用 于触发特定动作或反应。
声音传感器
检测声音信号,可用于声控操 作或实现声音交互功能。
温度传感器
检测环境温度,可用于温度控 制或环境感知。
传感器连接与配置方法
连接步骤
将传感器线缆插入NXT主控器对 应的传感器端口,确保连接稳固。
组装前准备工作
01
02
03
04
仔细阅读说明书
了解套件内容、组装步骤和注 意事项。
准备工具
需要一把小十字螺丝刀和一把 平口螺丝刀,用于拧紧螺丝和
拆卸部件。
安排工作空间
确保组装过程中有足够的空间 摆放零件和工具,并保持整洁。
检查电源
确认电池盒已安装好电池,并 确保电池极性正确。
逐步组装指南
构建机器人底盘
乐高机器人用户手册 NXTUserGuide
目录
• 开箱与组装 • 编程与软件安装 • 传感器与输入设备应用 • 马达与输出设备控制 • 常见问题排查与解决方案 • 进阶技巧与拓展应用
01
开箱与组装
NXT乐高机器人套件内容
NXT智能砖
控制机器人的大脑,具备强大的计算能力和多 种传感器接口。
伺服马达
创意项目设计思路展示
自动寻迹小车
利用光线传感器和电机控制,实现小车自动寻迹 行驶。
智能搬运机器人
通过编程和传感器控制,实现机器人自动搬运物 品和避障功能。
人形机器人
利用NXT机器人的灵活性和可编程性,设计人形 机器人,实现各种动作和语音交互功能。
参加比赛和展示活动建议
了解比赛规则和评分标准 在参加比赛前,需要了解比赛规则和评
关于蓝牙 NXT LEGO 蓝牙协议总揽
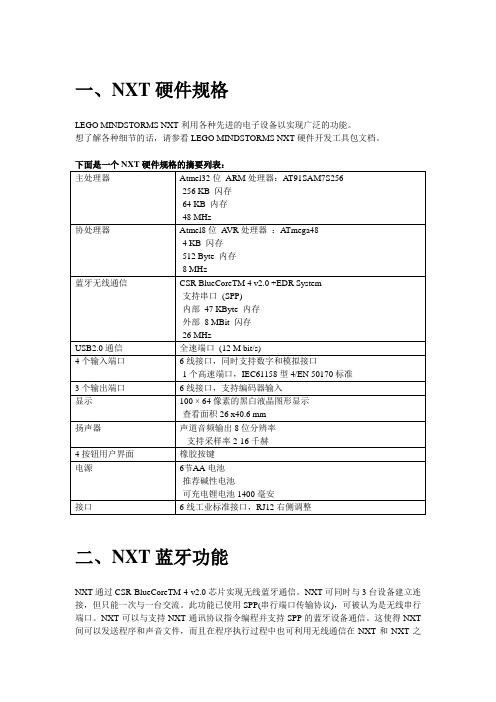
一、NXT硬件规格LEGO MINDSTORMS NXT利用各种先进的电子设备以实现广泛的功能。
想了解各种细节的话,请参看LEGO MINDSTORMS NXT硬件开发工具包文档。
下面是一个NXT硬件规格的摘要列表:主处理器Atmel32位ARM处理器:A T91SAM7S256-256 KB 闪存-64 KB 内存-48 MHz协处理器Atmel8位A VR处理器:A Tmega48-4 KB 闪存-512 Byte 内存-8 MHz蓝牙无线通信CSR BlueCoreTM 4 v2.0 +EDR System-支持串口(SPP)-内部47 KByte 内存-外部8 MBit 闪存-26 MHzUSB2.0通信全速端口(12 M bit/s)4个输入端口6线接口,同时支持数字和模拟接口-1个高速端口,IEC61158型4/EN 50170标准3个输出端口6线接口,支持编码器输入显示100 × 64像素的黑白液晶图形显示-查看面积26 x40.6 mm扬声器声道音频输出8位分辨率- 支持采样率2-16千赫4按钮用户界面橡胶按键电源6节AA电池-推荐碱性电池-可充电锂电池1400毫安接口6线工业标准接口,RJ12右侧调整二、NXT蓝牙功能NXT通过CSR BlueCoreTM 4 v2.0芯片实现无线蓝牙通信。
NXT可同时与3台设备建立连接,但只能一次与一台交流。
此功能已使用SPP(串行端口传输协议),可被认为是无线串行端口。
NXT可以与支持NXT通讯协议指令编程并支持SPP的蓝牙设备通信。
这使得NXT 间可以发送程序和声音文件,而且在程序执行过程中也可利用无线通信在NXT和NXT之间发送和接收信息。
为了减小蓝牙功耗,这里用的是蓝牙2类设备,也就意味着有效距离最大10米。
NXT BRICK蓝牙功能NXT BRICK蓝牙功能被设置为主/从通信通道。
也就是说网络中需要有一台NXT作为主机,在需要时,其他NXT再通过它通信。
乐高机器人简单讲义[宝典]
![乐高机器人简单讲义[宝典]](https://img.taocdn.com/s3/m/4cffab01a31614791711cc7931b765ce05087a85.png)
乐⾼机器⼈简单讲义[宝典]乐⾼机器⼈简单讲义[宝典] 机器⼈组装第⼀步:第⼆步:第三步:第四步:第五步:第六步:第七步:第九步:第⼗步:NXT控制器A B CNXT智能积⽊块有三个输出端⼝,分别为A、B、C,可以连接电机和灯泡。
NXT有四个输⼊端⼝1、2、3、4,连接不同的传感器,通过转换器可连接RCX系列传感器。
1 2 3 4 软件⾯板:菜单栏⼯具栏程序名字2.编程区⾯板3.控制⾯板1.模块⾯板基本⾯版完整⾯板⾃定义⾯板 4.参数设置⾯板常⽤⾯板介绍通过程序下载声⾳⽂可以设置A、B、C三个输出端⼝连接⽅式,电机输出⽅向、能量级别和延续时间等。
件到NXT,并保存在记录A、B、C三个端⼝输出动作、可以设置记录时间,然后通过“播放”功能,将刚才NXT“sound files”⽂件执⾏的动作复制出来。
中,可以选择软件⾃带的⽂件,也可以⾃可以显⽰图像和⽂本,我们可以通过将“数字转换为⽂本”功能,将电机和传感器的数据实时⼰来编写。
显⽰在NXT屏幕上。
有时间和传感器等待,包括触动传感器、声⾳传感器、光电传感器和超声波传感器等待。
分⽀条件有传感器和参数值判断,传感器包括“⽆限循环、时间循环、传感器循环、次数循环和逻辑判断循环”。
分⽀包括“触动、声⾳、光电等”,参数值分⽀包括“数字判断、逻辑判断和⽂本判断”。
完整⾯板介绍包含“常⽤⾯板”⾥所有的功能模块。
输出功能模块,包括单电机、灯泡、发送信息(通过蓝⽛)、声⾳和NXT显⽰器输出模块。
可以设置NXT传感器,RCX传感器、计时器传感器、NXT按钮和接收信息。
包括“等待、循环、分⽀”结构功能模块和停⽌输出模块。
可以定义变量,能进⾏数据运算,包括加、减、乘、除、⼤⼩、范围和逻辑判断。
包括⽂本模块、数字转换⽂本模块、保持激活模块、⽂件存储模块、校准模块、重置电机模块。
⾃定义⾯板:可以⾃⼰设计模块,根据需求可以设机成不同的图标,能进⾏个性化命名将⼀段程序模块化可以把任务分解成若⼲个⼩任务来单独完成,⽅便阅读。
利用乐高NXT机器人创建自动控制水温实验平台

Science and Technology & Innovation ┃科技与创新・127・文章编号:2095-6835(2016)23-0127-02利用乐高NXT 机器人创建自动控制水温实验平台付曦东,龙 庄,鲁 瑛(宜春市科技情报所,江西 宜春 336000)摘 要:乐高NXT 机器人作为一种相当优秀的实验平台,能对将多种资源进行整合,满足实验要求。
就如何利用乐高NXT 机器人创建自动控制水温实验平台的实验目标、实验步骤、软件运行等进行了介绍。
关键词:温度控制;机器人;传感器;图形化编程中图分类号:TP242 文献标识码:A DOI :10.15913/ki.kjycx.2016.23.127 乐高NXT 机器人可以将信息、机械、电子、传感器等多学科知识整合,帮助我们实现难度大的创新实验。
许多化学、生物方面的研究中都涉及水温精确控制问题,比如化肥过磷酸钙中有效磷的提取测定,细菌、真菌的液体培养等。
以下就利用NXT 乐高机器人的功能,在精确控制水温方面进行探讨。
1 实验目标控制水温在25±0.1 ℃,并需要对装有提取剂的三角瓶进行30 min 振荡;调整水温精确控制在30±0.1 ℃、35±0.1 ℃、40±0.1 ℃、45±0.1 ℃等;绘制出温度曲线。
2 实验设备及准备制作简易隔热式水浴恒温箱,装载自动控制水温平台,以微型振荡器(尺寸为210 mm ×160 mm ×110 mm )带动。
恒温箱内装有2 L 的水(25℃),水中架子上放有提取剂和提取物的三角瓶;乐高温度传感器固定在箱内,以数据线连接到乐高NXT 主机。
恒温箱用聚苯乙烯泡沫塑料泡沫来制作,尺寸为286 mm ×166 mm ×186 mm ,厚度为20 mm ,内涂有防水涂料。
实验时盖子要盖严实,以防与空气热量交换过多。
2024版nxt机器人(乐高)中文教程

获奖经验分享及心得体会交流
分享获奖经验
与团队成员分享获奖经验, 包括比赛技巧、团队协作 等方面的经验。
交流心得体会
鼓励团队成员交流比赛过 程中的心得体会,共同总 结经验和教训。
激励团队成员
通过获奖经验分享和心得 体会交流,激励团队成员 继续努力,争取更好的成 绩。
06 常见问题解答与 故障排除
硬件故障识别及排除方法论述
维护保养知识普及和注意事项提醒
01
定期清洁
定期使用干布擦拭机器人表面,保 持清洁,避免灰尘和污垢堆积。
03
存储环境
将机器人存放在干燥、通风、无阳 光直射的地方,避免潮湿和高温环
境。
02
电池保养
遵循电池使用说明,避免过度放电 和充电,以延长电池使用寿命。
04
使用注意事项
在使用过程中,避免将机器人暴露 在强磁场、高压电场等有害环境中,
NXT机器人通过蓝牙或USB接口与电脑进行连接,使用乐高MINDSTORMS软件进 行编程和控制。
NXT机器人发展历程
第一代乐高MINDSTORMS机器人于 1998年推出,基于RCX微控制器;
NXT机器人在教育、科研、竞赛等领 域得到了广泛应用;
2006年,乐高公司推出了第二代 MINDSTORMS NXT机器人,使用更 强大的NXT微控制器;
硬件需求
NXT主机、电机、机械臂、抓取器、传感பைடு நூலகம் 等。
软件编程
编写物品识别、机械臂控制、分拣逻辑等程 序。
调试与优化
调整机械臂动作、传感器位置等提高系统效 率与准确性。
其他创意项目展示
01
创意项目1
智能巡逻机器人,能够自主巡逻并 检测异常情况。
nxt机器人(乐高)中文教程
nxt(乐高)中文教程一、教学内容本节课的教学内容选自《NXT(乐高)中文教程》第一章第四节,主要介绍如何使用NXT的传感器和执行器进行简单的编程控制。
具体内容包括:温度传感器的使用、触摸传感器的使用、电机的基本控制和传感器数据的读取与显示。
二、教学目标1. 学生能够理解NXT的基本组成部分及其功能。
2. 学生能够掌握温度传感器和触摸传感器的使用方法。
3. 学生能够通过编程控制电机实现基本运动。
三、教学难点与重点重点:NXT的基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
难点:传感器数据的读取与显示、编程控制电机实现复杂运动。
四、教具与学具准备教具:NXT套件、电脑、编程软件。
学具:每位学生一台NXT套件、每组一台电脑、编程软件。
五、教学过程1. 实践情景引入:让学生观察并描述NXT的外观和组成部分。
2. 知识点讲解:介绍NXT的基本组成部分及其功能,如电机、传感器、触摸屏等。
3. 例题讲解:示范如何使用温度传感器和触摸传感器进行编程控制。
4. 学生动手实践:让学生分组进行编程实验,使用温度传感器和触摸传感器控制NXT的运动。
5. 随堂练习:让学生编写程序,实现使用传感器数据控制NXT的运动。
6. 知识拓展:介绍如何使用编程软件进行电机控制和传感器数据的读取与显示。
六、板书设计板书内容:NXT基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
七、作业设计1. 请用编程软件编写一个程序,实现使用温度传感器控制NXT的运动。
答案:根据温度传感器的数据,控制NXT的电机进行相应的运动。
2. 请用编程软件编写一个程序,实现使用触摸传感器控制NXT的运动。
答案:根据触摸传感器的状态,控制NXT的电机进行相应的运动。
八、课后反思及拓展延伸本节课学生掌握了NXT的基本组成部分及其功能,能够使用温度传感器和触摸传感器进行编程控制。
但在传感器数据的读取与显示方面,部分学生仍存在困难,需要在课后加强练习和指导。