电动汽车直接转矩控制系统仿真
电动汽车用异步电动机直接转矩控制系统仿真

轻, 而且效 率高 、 调速 范 围宽 。其 中异步 电动机直
接转 矩控制 系 统是 一 种 高效 动 、 态 性 能 的交 流 静 调速 方法 。这 种控 制 具 有 直接 简 单 、 矩 响应 迅 转 速 的特点 , 电动 汽 车用 异 步 电 动机 上 的应 用 越 在 来 越普遍 。
通讯作者 : 刘 旺 (9 0) 男 , 汉 科 技 大 学 副教 授 . - i l wa g WUte ucl 1 5一 , 武 E mal i n @ :u S.d . r
维普资讯
型 。相 应 电流 、 电压 及磁 链变 换矩 阵如下 _ : 5 ]
1 异 步 电 动机 直 接 转 矩 控 制 系 统 的
原 理
相对 于矢量 控制技 术 中的转 子磁链 难 以准确 观测 , 直接 转矩 控 制系 统 直 接在 每 个 采 样周 期 采 集现 场 的定子磁 链幅 值 和转 矩值 后分别 与 给定 的定 子 磁 链 幅 值 和 转 矩 值 相 比较 , 以控制定 子磁链 偏差 和转矩 值偏 差分别 在 相应范
的最 终 目标 。驱 动 电动机及其 控制技 术是 制约 电
动汽 车发展 的 主要 因素 之 一n ] 。电 动 汽车 用 驱
动 电动机有 直 流 、 流 电动 机 两 大类 。虽 然 直 流 交
电动 机具有 良好 的 电磁 转 矩 控 制特 性 , 速 比较 调
方便 , 制装 置 简 单 , 电动 机效 率 较低 , 量 较 控 但 质
动 汽 车 用异 步 电动 机 直 接 转 矩 控 制 系统 的 仿 真 模 型 。 对 电动 机 启 动 后 在 不 同 负 载 下 的 运 行 工 况进 行 动 态仿
直接转矩控制系统的性能仿真分析
第2 4卷 第 3期
20 0 8年 9月
上
海
电 力 学2 .
S p 2 0 e . 0 8
Junl o S ag a Unvri o Eetc P w r 0 ra f hn hi iesy f lc i t r o e
MEIBa —h n , is a CHEN Hui ,TANG n .e g Li g fn
( .Sho o l tc o e a dA t ainE gnei Sa g a U i rt l tc o e, h n h i 1 colfEe r w r n u m t n ier g, h n h i n e i o Ee r w r S ag a ci P o o n v sy f c i P 2 09 , hn ;.C lg I om tnE gne n , in tnU i r t, i ga 4 10 ,C ia 0 0 0 C ia 2 o ee n r ai n ier g Xa ga n e i Xa tn 1 15 hn ; l o f f o i v sy n 3 C lg . ol e fMeh t n s nier ga dA tm t n S a g a U i rt, h n h i 20 2, hn ) e o car i gne n n uo ai , h nh i n e i Sa g a 0 7 C i ocE i o v sy a
特 性 易受 电机参 数 变 化 影 响 、 际 性 能 难 以达 到 实 理 论分 析结果 的一 些重 要 技术 问题 . 接转 矩 控 直 制 系统 直接 在定子 坐标 系下 采用 空 间 电压矢 量 的 概 念来分 析 三相交 流 电机 的数学 模 型和 各控 制物 理 量 , 问题 变得简 单 明 了. 使 直接 转矩 控 制 系统 具 有 以下几 个 特 点 j采 用 Bn —ag控 制 从 而 得 : agB n
电动车用四相开关磁阻电机直接转矩控制及其仿真

电动车用四相开关磁阻电机直接转矩控制及其仿真开关磁阻电机直接转矩控制技术是继矢量控制技术之后,一种新型且性能比较高的开关磁阻电机传动控制技术。
文章在电动汽车运行特点的前提下,对电动汽车用开关磁阻电机直接转矩控制技术进行研究,并且在Matlab Sinmulink环境中进行仿真,通过对仿真结果对比分析验证了直接转矩控制策略的优越性。
标签:开关磁阻电机;直接转矩控制;Matlab Sinmulink仿真随着人们生活水平日益提高,人均汽车占有量大幅度提升,传统汽车产生的尾气对环境造成了严重威胁,因此发展绿色交通工具成为当今社会的一个热点话题。
开关磁阻电机(Switched Reluctance Motor,简称SRM)具有结构简单、起动转矩大等优点,非常适合用于电动车驱动系统。
SRM具有独特的双凸极结构,因此存在转矩脉动大和噪声问题。
因此如何从控制角度抑制电机运行时的转矩脉动成为关键问题。
1 直接转矩控制原理直接转矩控制的控制对象是功率变换器中的开关管,在保证定子磁链幅值不变的前提下,通过调整开关管的开通关断来改变定转子磁链的相角,从而控制转矩的增减。
开关磁阻电机空间电压矢量选择:根据功率变换器中开关管通断状态的不同,定义“1”、“0”、“-1”三种状态。
“1”状态表示上下桥臂开关管均导通;“0”状态表示上桥臂关断,下桥臂开关管导通;“-1”状态表示上下桥臂开关管均关断。
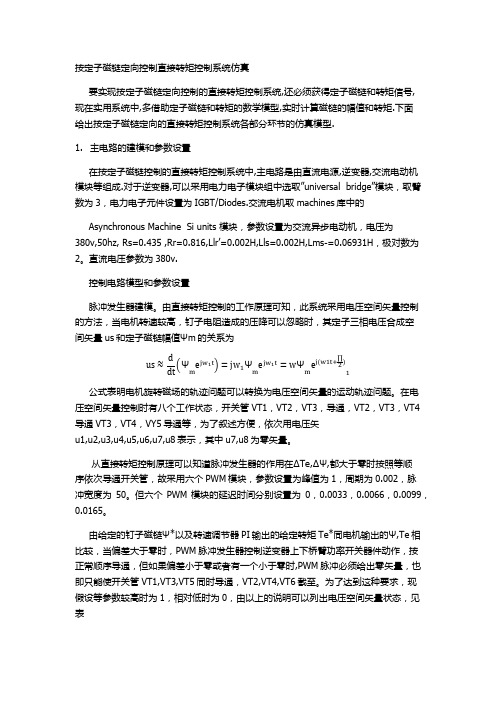
之后在定子坐标系下,定义出四相开关磁阻电机定子电压的8个空间矢量,根据这8个电压矢量的角平分线划分,我们能够得到8个区间,如图1。
由图1可知,当在区间N=k 内(k=1、2、…、8)时,选择超前于当前磁链矢量的电压矢量U(k+1)、U(k+3)可以增大转矩;反之选择U(k-1)、U(k-3)可以减小转矩。
选择与当前磁链矢量夹角小于90°的电压矢量U(k+1)、U(k-1)可以使磁链增加;反之U(k+3)、U(k-3)使磁链减小。
基于交流电动机动态模型的直接转矩控制系统的仿真与设计

运动控制课程设计班级:电气三班学号:姓名:基于交流电动机动态模型的直接转矩控制系统的仿真与设计设计目的应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。
应用计算机仿真技术,通过在MATLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。
1直接转矩控制的基本原理及规律直接转矩控制系统简称DTC(Direct Torque Control)系统,是继矢量控制系统之后发展起来的另外一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面利用转矩反馈直接控制电机的电磁转矩,因此而得名为直接转矩控制。
1.1直接转矩控制系统原理与特点如图1-1为直接转矩控制的原理框图,和VC系统一样,它也是分别控制异步电动机的转速和磁链,转速调节器ASR的输出作为电磁转矩的给定信号*T,T后面设置转矩控制内环,它可以抑制磁链变化对于转矩的影响,从而使得在*转速和磁链系统实现解耦。
因此,从整体控制结构上来看,直接转矩控制(DTC)系统和矢量控制系统(VC)系统是一致的都获得了较高质量的动态性能以及静态性能。
图1-1直接转矩控制系统图的幅值从图中中可以看出,直接转矩控制系统,就是通过使定转子磁链s保持恒定,然后选择合理的零矢量的作用次序和作用时宽,以调节定子磁链矢量的运动速度,从而改变磁通角的大小,以实现对电机转矩的控制。
在直接转矩控制技术中,其基本控制方法就是通过电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角的大小,以达到控制电动机转矩的目的。
从以上介绍我们可以了解到DTC系统在具体控制方法上的一些特点:⑴转矩和磁链的控制采用双位式控制器,并在PWM的逆变器中直接用这两个控制信号产生电压的SVPWM波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的姐结构。
纯电动汽车用永磁同步电机转矩控制仿真研究

纯电动汽车用永磁同步电机转矩控制仿真研究随着环保意识的不断提高,迫切需要向更可持续的出行方式转变,而纯电动汽车作为一种零排放的出行方式,逐渐受到人们的青睐。
而作为纯电动汽车的“心脏”——电机控制系统的研究则显得尤为重要。
本文基于永磁同步电机,对其进行了转矩控制的仿真研究。
永磁同步电机作为一种高效、高功率密度的电机,其可以在极小的空间内提供大量的驱动力,因此在电动汽车领域得到了广泛应用。
在控制系统中,制动力矩控制是非常重要的一项功能。
本文通过基于Matlab/Simulink的控制算法仿真实验,测试了永磁同步电机在加速、制动过程中的控制能力,以及实现一个较为平稳的驾驶过程所需的控制精度。
首先,本文控制了电机的空载和负载情况下的转速,为后续的控制仿真实验奠定了基础。
接下来,通过添加转矩控制器对电机进行控制,实现电机的加速和制动。
在仿真实验中,通过改变控制器的比例积分微分系数,进行了多组实验,并分别观察了电机的加速和制动过程。
在实验过程中,我们注意到控制器系数的不当设置容易导致电机的震荡。
因此,在实验中,我们通过多次调整控制器系数来优化电机的控制精度,使电机的输出转矩更为稳定,尤其是在制动过程中,避免由于大幅度转矩变化所带来的车身抖动问题。
总体来说,本文基于永磁同步电机的转矩控制仿真研究深入剖析了电机的控制原理和控制算法,在实验中获得了较好的仿真效果,并探讨了电机控制的优化方案。
未来随着纯电动汽车市场的不断扩大,永磁同步电机技术必将在此领域中发挥更为重要的作用。
电机控制系统的研究也将持续推进,为推动环保节能技术的发展提供更加全面和精准的控制方案。
在进行永磁同步电机转矩控制仿真研究时,需要了解和分析相关的数据,以便确定实验参数和控制器系数,实现更好的仿真效果。
以下列出一些相关数据并进行分析:1. 电机的额定转速和额定扭矩:这是进行电机控制仿真的基础参数,也是确定实验参数和控制器系数的基础。
2. 电机控制器系数:包括比例系数、积分系数、微分系数等,这些系数决定了控制器的控制精度,需要通过实验来确定最佳参数。
永磁同步电机直接转矩控制系统建模与仿真

永磁同步电机直接转矩控制系统建模与仿真黄捷音;李光升;董今朝;谢永成【摘要】文章以永磁同步电机控制为研究对象,探究应用于电传动车辆的永磁同步电机直接转矩控制方法。
首先,建立某型电动车辆电机模型,对直接转矩控制策略所需的各模块的模型进行研究,然后在 Simulink 中进行仿真,通过仿真试验,验证了直接转矩控制方法应用于永磁同步电机控制的可行性和可靠性。
%This paper takes PMSM control as the research object to explore PMSM direct torque control method appli-cable to electric drive vehicle.First ofall,electric machine model of certain electric motor vehicle is established.Then mod-el of each module required by direct torque control strategy is studied and Simulink simulations are done.Through the sim-ulations,PMSM direct torque control is proved effective and feasible.【期刊名称】《通信电源技术》【年(卷),期】2015(000)003【总页数】3页(P18-19,22)【关键词】永磁同步电机;直接转矩;Simulink 仿真【作者】黄捷音;李光升;董今朝;谢永成【作者单位】装甲兵工程学院,北京 100072;装甲兵工程学院,北京100072;263978 部队,河南洛阳 471099;装甲兵工程学院,北京 100072【正文语种】中文【中图分类】TP391.91 直接转矩控制的基本思想直接转矩控制的基本思路[1]是,通过转矩两点式调节器把转矩检测值与转矩给定值作滞环比较,把转矩波动限制在一定的容差范围内,容差的大小由频率调节器来控制,因此,直接转矩控制的控制效果不取决于电机的数学模型是否能够简化,而是取决于转矩的实际情况。
按定子磁链定向控制直接转矩控制系统仿真
按定子磁链定向控制直接转矩控制系统仿真要实现按定子磁链定向控制的直接转矩控制系统,还必须获得定子磁链和转矩信号,现在实用系统中,多借助定子磁链和转矩的数学模型,实时计算磁链的幅值和转矩.下面给出按定子磁链定向的直接转矩控制系统各部分环节的仿真模型.1.主电路的建模和参数设置在按定子磁链控制的直接转矩控制系统中,主电路是由直流电源,逆变器,交流电动机模块等组成.对于逆变器,可以采用电力电子模块组中选取”universal bridge”模块,取臂数为3,电力电子元件设置为IGBT/Diodes.交流电机取machines库中的Asynchronous Machine Si units 模块,参数设置为交流异步电动机,电压为380v,50hz, Rs=0.435 ,Rr=0.816,Llr’=0.002H,Lls=0.002H,Lms-=0.06931H,极对数为2。
直流电压参数为380v.控制电路模型和参数设置脉冲发生器建模。
由直接转矩控制的工作原理可知,此系统采用电压空间矢量控制的方法,当电机转速较高,钉子电阻造成的压降可以忽略时,其定子三相电压合成空间矢量us和定子磁链幅值Ψm的关系为us≈ddt(Ψme jw1t)=jw1Ψme jw1t=wΨme j(w1t+∏2)1公式表明电机旋转磁场的轨迹问题可以转换为电压空间矢量的运动轨迹问题。
在电压空间矢量控制时有八个工作状态,开关管VT1,VT2,VT3,导通,VT2,VT3,VT4导通VT3,VT4,VY5导通等,为了叙述方便,依次用电压矢u1,u2,u3,u4,u5,u6,u7,u8表示,其中u7,u8为零矢量。
从直接转矩控制原理可以知道脉冲发生器的作用在ΔTe,ΔΨ,都大于零时按照等顺序依次导通开关管,故采用六个PWM模块,参数设置为峰值为1,周期为0.002,脉冲宽度为50。
但六个PWM模块的延迟时间分别设置为0,0.0033,0.0066,0.0099,0.0165。
电动汽车用永磁同步电机直接转矩控制系统设计

旋转坐标 3 d q / — 变化 葛低速均宥影响 较宽 担负大量工作,系统曩杂
BP S 设计
度动态响应快 、 需要 的传感器较少等优点 。 直接转矩控制 (T ) D C
的基本思想是维持定子磁链幅值不变 , 通过调整其旋转速度进行
转矩角的 调整 以控制转矩与矢量控制系统相 比, 系统转矩响应 陕, 鲁棒 陛好 , 随着技术在感应 电机上的成功应用 , 将其引入到永磁 同步牵引电动机系统将进一步提高 电动汽车的动力性和可靠性 ,
C no D C S s m o t l T ) yt r( e
S IY0 g XU u -h n , H n, H a z o g RUAN Hu, UANG im i H Hu - n
( pr n o Auo t n Wu a l es o T c n lg , h n4 0 7 , ia De at t f tmai , h nUlV r f e h oo y Wu a 3 0 0 Chn ) me o i
( 武汉理工大学 自 动化学 院, 湖北 武汉 407 ) 300
摘
要: 本设 计 是 基 十 I P的 电动 汽 车 j 永 磁 同 步 电 机 直接 转 矩 控 制 系统 。文 章 闸 述 电机 数 宁控 制 系统 的技 术 方案 ,硬 件 成 及 ) S } j 实现 , 并 没订‘ 分 硬 什 电 路 。 了部
d s u s d ic s e .
Ke r sDS ; e ma e t a n t y c r n u oo ( M S ) D r c T r u o t l T y wo d : P P r n n g e n ho o s M S M trP M ; i t o q e C nr ( C) e o D
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 系统仿真
Simulink 又 称 为 动 态 系 统 仿 真 (Dynamic System Simula2 tion) 。它是 MATLAB 中功能十分强大的工具箱 。用它可以 在设计系统的时候 ,先对系统进行仿真和分析 ,然后及时进 行必要的修正 ,以实现高效的系统开发 。Simulink 可以采用 以下几种方法建立新模型 :
ABSTRACT :The paper presents the organization and the implementation of virtual simulation training system for portal crane operation. We discuss with emphasis on the built - up of virtual simulation desktop and the key technologies adopted. The design and the implementation of virtual simulation training system overcomes the deficiency of traditional on - site training system , at the same time , improves the vivid of train2 ing system. It is more important for railway station to build a good foundation to realize remote teaching and to develop distributed virtual reality application system in the future. KEYWORDS :Portal crane ;Virtual simulation ;Simulation training
[3 ] 张茂军. 虚拟现实系统[M] . 北京 :科学出版社 ,2001.
统。
作者简介 龙玉国 (1946 - ) ,男 (汉族) ,湖南武汉人 ,副教授 , 研究领域为现代 (非传统 ) 数据库及信息系统 、系统 设计与开发 、实时应用 。 赵红武 (1974 - ) ,男 (汉族) ,湖北应城人 ,硕士研究 生 , 主要研究方向为现代 (非传统) 数据库与信息系
SIMUL IN K构 造 的 此 电 动 汽 车 控 制 系 统 仿
真模型稳定性好 ,
(下转第 122 页)
— 119 —
小车所包含的多边形数目相差很大 ,因此采用这种方法可以 保证在不降低观测效果的情况下 ,大大减少渲染负载 。
5 结论 该系统已在南昌铁路局货运处装卸中心的司机培训中
得到了应用 。丰富 、生动的语音和动画效果仿真了门式起重 机的实际操作情景 ,大大提高了学员的培训兴趣 ,收到了良 好的培训效果 。
(3)
从 (3) 式得到如下结论 :
1)
当施加超前于定子磁通的电压矢量 , 使
d dt
Tf
> 0时,
转矩将会增加 。
2)
当施加落后于定子磁通的电压矢量或零矢量 , 使
d dt
Tf
< 0 时 ,转矩将会减小 。
从物理概念上也很容易解释
Tf
=
np Lσ
(φr
φs)
(4)
从式 (4) 可知 ,电磁转矩的大小是由转子磁链和定子磁 链之间的叉积决定的 。在实际系统运行中 ,控制定转子磁链 的幅值基本不变 ,要改变电磁转矩的大小 ,可以通过改变定 转子磁通间的夹角来实现 。而转子磁通的旋转速度不会突 变 ,因而这又主要通过改变定子磁通的旋转速度来达到改变 转矩这一目的 。
采用先进的系统仿真工具 ,对提高仿真的效率和仿真的 正确性都是至关重要的 。MATLAB 语言是 MathWorks 公司于 1984 年推出的数学软件 。它优秀的数值计算能力和卓越的 数据可视化能力使其很快在数学软件中脱颖而出 。Simulink 是 MATLAB 提供的一个用来对动态系统建模 、仿真和分析的 一个软件包 ,提供了友好的用户界面 ( GUI) ,仿真模型用不同 基础模块组成的框图来表示 ,用户建模只要简单的单击和拖 动鼠标的动作就能完成 。S 函数是 Simulink 的核心 ,任何复 杂的函数可以用它来建模并进行仿真 。
母线电压 Udc 和缩短采样控制周期 , 就可以获得高动态性能 的转矩响应 。
在 Lσ通常很小的情况下 ,由于漏磁通很小 ,所以此时定子 磁通和转子磁通无论在相位还是幅值上均很接近 ,即φr ≈φs 。
将 φr ≈ φs 代入 (2) 得 :
Lσ
d dt
Tf
≈
np (φs
us) - npωφr s ·φs - Rm Tf
图 5 定子线电压波形
的要求 。
本文 利 用 MATLAB/ SIMULINK 建 立 了
电动汽车直接转矩控制系统的仿真模型 。
此仿真方法突破了传统方法需编制大量繁
杂程序的做法 ,在仿真期间 ,模型的所有参
数都能在线变更 ,多个示波器可以同时对
多 个 变 量 进 行 监 视 , 十 分 方 便。用
=
Lr Lm
Rs
+
Lm Lr
Rr
Lσ + Lr Rr
=
Lr Lm
Rs
+
Ls Lm
Rr
式中 , Tf ,φs ,φr 及ωr 在一个采样周期内的变化相对于外 加激励电压 us 的变化可忽略不计 , 即认为基本恒定不变 。也 就是说 ,影响瞬间转矩变化的因素是 us 。在直接转矩控制中 , 只需在一拍内就可实现 us 有明确目的的突变 ,使转矩迅速变 化 。因而 , 在电机 、逆变器允许的条件下 , 尽可能地提高直流
1 引言
电动汽车 ( Electric Vehicle) 是一种电力驱动的 、节能的 、 极少污染的新型交通工具 ,是世界各国竟相发展的方向性 、 战略性项目 ,具有超前性 、示范性 、综合性 、整体性的高科技 内涵 。其中 ,电机及控制系统是电动汽车的关键技术之一 。 电动汽车对电气传动系统要求 ;基速以下大转矩以适应快速 起动 、加速 、负荷爬坡 、频繁启停等要求 ,基速以上小转矩 、恒 功率 、宽范围以适应最高车速和公路飞驰 、超车的要求 。目 前 ,国际上先进电动汽车驱动系统多采用矢量控制和直接转 矩控制 。矢量控制存在很多缺点 ,如大量复杂的坐标变换给 实时控制带来一定难度 ;矢量控制需要电机转子参数 ,即转 子电阻和转子电感 。而转子电阻会随温度而变 ,转子电感会 随饱和程度而变 ,所以控制精度及系统动静态特性受转子参 数变化的影响较大 。再加上转子磁链观测器通常无法保证 完全准确 ,使其实际控制效果难以达到理论分析的预期效 果 。直接转矩控制直接在电机定子坐标系上计算转矩和磁 链 ,省去了坐标旋转变换的麻烦 ,对电机参数变化不敏感 ,是 较为理想的电动汽车驱动控制系统 。
参考文献 : [1 ] 汪成为. 灵境 (虚拟现实) 是建立人机和谐仿真系统的关键技术
[J ] . 系统仿真学报 ,1995 ,7 (4) 1
[ 2 ] J Rossignac ,P Borrel . Mutli - Resolution 3D approximations for render2 ing complex scences[ C] . in Modeling in Computer Graphics ,edit by B Falcidieno and T L Kunii ,spring - Verleg ,1993 ,pp 455 - 465.
Machine SI Units) 模型 ,省去了根据电机基本方程自己编写 S 函数来建立异步电机模型 。
三相异步电动机的定子电压和定子电流经过 3/ 2 坐标 变换 ,用于定子磁链和转矩的观测 ,再根据磁链和转矩观测 器模型得到磁链的幅值 、相角和转矩 。依据模型方程可以直 接把相应的功能模块从 Simulink 模块库中拖曳出来并连接 , 见图 2 。从设计美观和方便的角度 ,对复杂系统可以建立和 封装子系统 (Subsystem) ,将多个小功能模块组合形成新的功 能模块 ,这样可以简化图形 ,减少功能模块的个数 。封装后 的磁链和转矩观测器见图 1 。
4 结论
电动汽车直 接转 矩 控 制 系 统 具有 动 态 响 应 速 度 快 、稳 态 精 度 高 、性能受电机参 数影响小 、计算简 单等特点 ,可以较 为理 想 地 完 成 电 动汽 车 驱 动 系 统
图 3 定子电接转矩控制系统仿真模型 图 2 用功能模块建模
由异步电机基本方程可以得到 :
Tf = np (φs
is)
=
np Lσ
(φr
φs)
(1)
Lσ
d dt
Tf
=
np
LLmrφs -
Lσis
us - npωφr s ·φr -
Lr Lm
Rs
+
Lm Lr
Rr
+
Lσ Lr Rr
Tf
= np (φr us) - npωφr s ·φr - Rm Tf
(2)
式中 , Rm
The Research of Virtual Simulation Training System for Portal Crane
LONG Yu - guo ,ZHAO Hong - wu
(School of Computer Science & Technology , Hua Zhong University of Science & Technology ,WuHan Hubei 430074 ,China)