桥式抓斗起重机电气控制系统
起重机的电气控制

知识训练
在方轴上可以叠装不同形状的凸轮块,以使一系列动、静触 头按预先安排的顺序接通与断开。将这些触头接到电动机电 路中,便可实现控制电动机的目的 常用的凸轮控制器有KT10 , KT14型。额定电流有25 A , 60 A o型号含义如下:
上一页 下一页 返回
知识训练
凸轮控制器的常用技术数据有额定电流、工作位置数、触点 数等。按重复短时工作制设计,通电持续率为25 %。如用于 间断长期工作时,其发热电流不应大于额定电流。 凸轮控制器的图形符号如图7-2所示。竖虚线为工作位置,
(4)在重物下放时,电动机工作在再生发电制动状态。此时, 应将控制器手柄由零位直接扳至下降第五挡位,而且途径中 间挡位不许停留。往回操作,这是不允许的。
上一页 下一页 返回
知识训练
注意:该控制电路不能获得重载或轻载时的低速下降。为了 在下降时能获得准确定位,需采用点动操作,即将控制器手 柄在下降第一挡与零位之间来回操作,并配合电磁抱闸来实 现。 2.电路分析 在图7-6中,凸轮控制器左右各有5个工作位置,共有9对动 合主触点、3对动断触点,采用对称接法。其中4对动合主触 点接于电动机定子电路进行换相控制,实现电动机正反转;另 外的5对主触点接于电动机转子电路,实现转子电阻的接入和 切除。由于转子电阻采用不对称接法,在凸轮控制器提升或 下放的5个位置,逐级切除转子电阻,以得到不同的运行速度。 3对动断触点,其中一对用于实现零位保护,另两对动断触点 与上升限位开关SQ1和下降限位开关SQ2实现限位保护。
上一页 下一页 返回
知识训练
目前,各工矿企业仍大量使用旧型号的交流磁力控制盘。例 如,平移机构PQR9,PQR9A等系列,升降机构PQR10 , PQR10A等系列。本书以介绍PQR10A系列交流磁力控制盘 为主。 3.磁力控制器 磁力控制器由主令控制器与磁力控制盘组成。采用磁力控 制器控制时,只有尺寸较小的主令控制器安装在驾驶室内, 其余电气设备安装在桥架上的控制盘中。具有操作轻便、维 修方便、工作可靠、调速性能好等优点;但所用电气设备多、 投资大且线路较为复杂。所以,一般桥式起重机同时采用凸 轮控制器与磁力控制器控制,前者用于平移机构与副钩提升 机构,后者用于主钩提升机构。当对提升机构控制要求不高 时,则全部采用凸轮控制系统。
抓斗起重机技术文件.
QZ5t-10.5mA6抓斗起重机技术文件一、简述QZ5t-10.5m起重机是根据发电有限公司相关要求设计制造的产品,用于抓煤渣和沉渣池清灰水淤泥,产品适用环境温度为-20℃-+40℃,供给电源为AC380±10%、50Hz。
二、主要依据标准起重机设计规范 GB3811通用桥式起重机 GB/T14405起重设备安装工程施工及验收规范 GB50278起重机机械安全规程 GB6067起重机试验规范和程序 GB5905电气装置起重机机械安全规程 GBJ232通用桥式起重机产品装置分等 JB/ZQ8001起重机滑接输电装置型号和基本参数 JB/T 6391.1起重机滑接输电装置技术条件 JB 6391.2安全滑接输电装置 Q/320211桥机和门式起重机制造及轨道安装公差 GB10183通用桥机和门式起重机司机室技术条件GB/T14407起重机缓冲器GB6164起重机吊钩GB10051.1~5碳素钢铸件分类及技术条件 GB5676优质碳素结构钢技术条件 GB699碳素结构钢GB700合金结构钢技术条件GB3077普通碳素结构钢和低合金结构钢热轧厚钢板和带钢 GB3274碳素钢板GB912YZR系列起重及冶金用绕线转子三相异部电动机技术条件ZBK26008旋转电机基本技术条件 GB755起重机电控设备 JB4315-97三、投标设备技术性能参数表1、QZ5t-10.5m参数表四、主要部件概述电动双梁桥式起重机主要由桥架部分、小车部分和电气部分构成。
1、桥架部分起重机桥架部分主要包括主梁、端梁、大车运行机构、主被动走台、大小车导电装置、主端梁栏杆、检修室及导电挡架等部件。
1)起重机主梁、采用焊接箱型梁、双梁结构,直接采用开板放样整根梁的结构,无接头、不分段。
在主梁上制作有主被动走台及栏杆,走台既方便检修,安装运行机构,安装电气控制柜、布置电缆线,还方便安装小车导电装置。
主梁制作时具有上拱度,跨中的上拱度控制在O.9S/1000-1.4S/1000,最大上拱度控制在跨中S/1O的范围内,主梁旁弯规定数值:≤S/2000,跨度偏差S±5mm且绝对值差≤5mm,主要承载构件钢板采用Q235B。
抓斗桥式起重机技术说明

抓斗桥式起重机技术说明一、产品用途本起重机广泛地适用于各厂矿普通货物的吊装作业,配置抓斗这种专用吊具进行特殊作业。
二、产品类型如图所示,本机为抓斗桥式起重机,主梁采用正轨箱型结构。
主梁下设闭式司机室,大车采用安全滑触线导电,小车采用电缆导电,各机构均采用电阻调速。
三、设计、制造的标准及规范如下:1、GB3811-83 《起重机设计规范》2、GB6067-85 《起重机安全规程》3、GB/T14405-93 《通用桥式起重机》4、GB10183-88 《桥式和门式起重机制造及轨道公差》5、GB5905-86 《起重机械试验规范和程序》6、GB8918-88 《优质钢丝绳》7、GB8923 《涂装前钢材表面锈蚀等级和除锈等级》8、GB699;GB700 《碳素结构钢》9、GBJ232-86 《电气装置安装工程施工及验收规范》10、JB4315-86 《起重机电控设备》11、TJ231 《机械设备安装工程施工及验收规范》12、GB9286 《色漆和清漆漆膜的规划试验》四、技术规格和主要技术条款4.1 起重机的结构、机构、机电设备和安全保护装置符合国家现行起重机及有关标准和规范规定。
4.2 有足够的强度、刚度、与使用寿命。
各机构安全可靠,工作平稳,震动和噪声符合规范规定。
4.3 电控系统与操作系统工作灵敏可靠,机电安全联锁和安全保护装置齐全,工作灵敏准确耐用。
4.4 制造起重机的材料符合国家冶金部标准。
4.5 主要机电设备提供出厂质量合格文件。
4.6 外协的电气设备和元件,遵循质量可靠,备件提供应及时,择优选用,并经用户确认。
4.7 各结构具有良好的可拆性,整机操作、维护、保养和修理方便。
4.8 钢材进行了抛光除锈的表面预处理,表面粗糙度达到GB8932《涂装前钢材表面锈蚀等级和除锈等级》标准,钢板为Sa2.5级,型钢为St3级。
4.9 焊缝按规定进行超声波探伤,提供探伤报告。
4.10 安装后的吊车大梁,在跨中S/10范围内上拱度为(1.1-1.3)S/1000(S为起重机跨度),提供上拱度实测记录。
第三节 起重机的基本结构组成
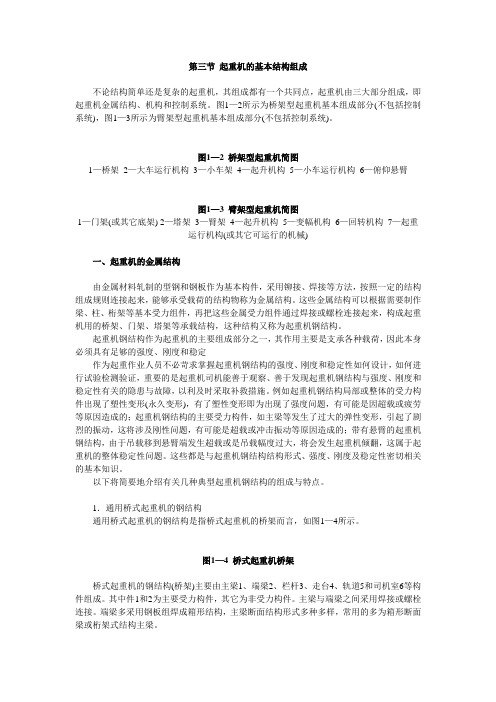
第三节起重机的基本结构组成不论结构简单还是复杂的起重机,其组成都有一个共同点,起重机由三大部分组成,即起重机金属结构、机构和控制系统。
图1—2所示为桥架型起重机基本组成部分(不包括控制系统),图1—3所示为臂架型起重机基本组成部分(不包括控制系统)。
图1—2 桥架型起重机简图1—桥架2—大车运行机构3—小车架4—起升机构5—小车运行机构6—俯仰悬臂图1—3 臂架型起重机简图1—门架(或其它底架) 2—塔架3—臂架4—起升机构5—变幅机构6—回转机构7—起重运行机构(或其它可运行的机械)一、起重机的金属结构由金属材料轧制的型钢和钢板作为基本构件,采用铆接、焊接等方法,按照一定的结构组成规则连接起来,能够承受载荷的结构物称为金属结构。
这些金属结构可以根据需要制作梁、柱、桁架等基本受力组件,再把这些金属受力组件通过焊接或螺栓连接起来,构成起重机用的桥架、门架、塔架等承载结构,这种结构又称为起重机钢结构。
起重机钢结构作为起重机的主要组成部分之一,其作用主要是支承各种载荷,因此本身必须具有足够的强度、刚度和稳定作为起重作业人员不必苛求掌握起重机钢结构的强度、刚度和稳定性如何设计,如何进行试验检测验证,重要的是起重机司机能善于观察、善于发现起重机钢结构与强度、刚度和稳定性有关的隐患与故障,以利及时采取补救措施。
例如起重机钢结构局部或整体的受力构件出现了塑性变形(永久变形),有了塑性变形即为出现了强度问题,有可能是因超载或疲劳等原因造成的;起重机钢结构的主要受力构件,如主梁等发生了过大的弹性变形,引起了剧烈的振动,这将涉及刚性问题,有可能是超载或冲击振动等原因造成的;带有悬臂的起重机钢结构,由于吊载移到悬臂端发生超载或是吊载幅度过大,将会发生起重机倾翻,这属于起重机的整体稳定性问题。
这些都是与起重机钢结构结构形式、强度、刚度及稳定性密切相关的基本知识。
以下将简要地介绍有关几种典型起重机钢结构的组成与特点。
1.通用桥式起重机的钢结构通用桥式起重机的钢结构是指桥式起重机的桥架而言,如图1—4所示。
桥式起重机控制系统设计毕业论文

桥式起重机控制系统设计毕业论文目录1绪论 (1)1.1传统桥式起重机控制系统存在的问题 (1)1.2桥式起重机电气传动技术的国内外发展概况 (1)1.3本课题的研究意义及主要内容 (2)2矢量控制变频调速 (4)2.1变频调速的基本原理 (4)2.2变频器的基本结构 (6)2.3变频调速的控制方式—矢量控制方式 (6)3 变频调速桥式起重机系统总体方案设计和部件选型 (8)3.1桥式起重机系统 (8)3.1.1各机构组成和特点 (8)3.1.2传统桥式起重机机的电气控制系统 (8)3.2本系统总体方案设计 (9)3.3系统的部件设计 (10)3.3.1电机的选用 (10)3.3.2变频器的选用 (12)3.3.3常用辅件的选择 (16)4可编程序控制器在桥式起重机变频控制系统中的应用 (19)4.1 PLC的系统组成与各部分的作用 (19)4.2可编程序控制器 (19)4.3变频调速起重机控制系统设计 (20)4.3.1系统控制的要求 (20)4.3.2控制系统的I/O点及地址分配 (20)4.3.3 PLC配置 (22)4.3.4.电气控制系统原理图 (23)4.3.5各机构的安全保护及检测 (25)5桥式起重机变频调速系统软件设计 (27)5.1 S7一200PLC网络的通信协议及本系统采用的通信协议 (27)5.1.1 S7-200PLC网络的通信协议 (27)5.1.2本系统采用的通信协议 (27)5.1.3上位机和PLC之间的通信 (27)5.2 PLC程序设计 (29)5.2.1 PLC编程软件概述 (29)5.2.2 程序设计 (30)5.3系统抗干扰措施 (37)6全文总结及其展望 (38)6.1全文总结 (38)6.2研究展望 (39)参考文献 (40)致谢 (41)1绪论1.1传统桥式起重机控制系统存在的问题桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位。
但在实际使用中,结构开裂仍时有发生。
基于PLC的桥式抓斗起重机变频控制系统优化设计

① 作者 : 锋 (9 2 ) 男 , 南巩义 , 许 昌职业 技术 学 院机 电工 程系 任教 。 薄关 18 一 , 河 在 科技 博览 l 6 3 4
图1 起重 机控 制系 统结 构框 图
F g F a e d a r m o c a e i l r m i ga f r n
c n r s s e o t ol y t m
图 2P C 序流 程 图 L 程
F g F o h r f P C i2 lw ca to L
1引 言 抓 斗 桥式起 重 机作 为物 料搬 运 的起 重 设备, 广泛应 用 在钢 厂 、码 头、仓 库 等场合 , 其 安全性 和 可靠性 要求 较高 。然而 , 对 目前抓 斗 桥式起 重机 主要 采 用继 电接 触器 控制 , 子 串 电阻方 法进 行 启动 与调 速 。 由于载 荷工 作环 境恶 转 劣, 利用 率高实 际使 用 中主要存 在 如下 问题 :1 调速方 式采 用转 子 串电 阻, () 机 械振动 大, 定位 比较 困难, 易造 成设 备损 坏 :2抓斗 电机采 用绕线 式 电动机, () 不 具备 软启动 特性 , 启动过程 中没 有 缓冲过 程, 易造成 电冲 击 或机械 冲击 :3 控 () 制 电路 由继 电器 和接 触器 组成 , 作过 程 中 由于粉尘 、湿度 等 因素 的影响 , 工 导 致元件触 点接 触不可靠 , 引起故 障 :4 抓斗桥 式起 重机提 升 电机 与开 闭电机 而 () 之 间无 电气联 系, 们之 间的配合 完全靠 司机操 作协调 , 它 劳动强度 大, 而且容 易 造 成 动作 不 同步 ,影 响正 常工 作 。 本文 针对 该系 统 的不足, 用可 编程 序控 制器 代替 继 电器 、 触器 控制 , 采 接 采 用变 频器 代替 转 子 串电阻 调速 方式 。改造后 , 使得起 重 机 的整体 特 性得 到 较 大提 高 , 行 效 果显 著 。 运 2抓 斗 电气控 制 系统硬 件 设 计 改进后 , 熏机 控制 系统 主要 由可编 程控 制器 、变频 器 、负荷 重量 测量 起 仪等 组 成 ( 控制 系 统 结构 框 图如 图 1所示 ) 。其 中大 车 为两 台 电动 机 同 时拖 动 , 现 同步 运行 。所 以整 个 系统 有 五 台 电动 机 2 基于 变频 调速 的 抓 斗 吊车 控制 系 统设 计 [ ] 工矿 自动 化 , J.
桥式抓斗起重机安装施工方案
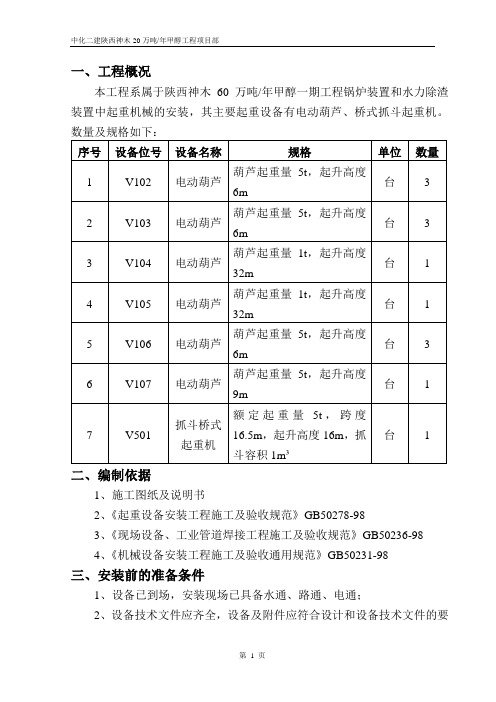
一、工程概况本工程系属于陕西神木60万吨/年甲醇一期工程锅炉装置和水力除渣装置中起重机械的安装,其主要起重设备有电动葫芦、桥式抓斗起重机。
数量及规格如下:二、编制依据1、施工图纸及说明书2、《起重设备安装工程施工及验收规范》GB50278-983、《现场设备、工业管道焊接工程施工及验收规范》GB50236-984、《机械设备安装工程施工及验收通用规范》GB50231-98三、安装前的准备条件1、设备已到场,安装现场已具备水通、路通、电通;2、设备技术文件应齐全,设备及附件应符合设计和设备技术文件的要求,并应有出厂合格证书及必要的出厂试验记录。
3、起重机地面轨道基础,吊车梁和安装预埋件等的坐标位置、标高、跨度和表面的平面度均应符合设计和安装的要求。
4、设备到安装前应对桥式起重机的跨度、上拱度、下翘度进行实际测量。
其中跨度的测量方法为:4.1、首先将起重机水平放置,在无风、无日照情况下测量。
测量时钢卷尺不得摆动,钢卷尺应到省一级认可的计量部门检定合格,并在有效期内。
4.2、起重机跨度的偏差S ∆应按下式计算:S S S -∆+∆+=∆21测式中 )(mm S 跨度实测值测--)(1mm 钢卷尺计量修正值--∆)(2mm 钢卷尺的修正值--∆)(mm S 跨度理论值--4.3起重机的跨度测量位置按下图确定。
起重机轨道跨度的允许偏差最大不应超过±4.55、起重机的混凝土基础应达到设计强度,轨道应按要求铺设完毕,并达到技术要求,经检查合格。
6、对轨道应进实地测量,起重机轨道跨度的偏差0S ∆按下式计算,测量点按下图确定032100S S S -∆+∆+∆+=∆测式中 )(0mm S 轨道跨度测值测--∆)(1mm 钢卷尺计量修正值--∆)(2mm 钢卷尺修正值--∆)(3mm 温度修正值--∆轨道的实际中心线对吊车梁的实际中心的位置偏差不应大于10mm ,轨道的实际中心线对安装基准线的水平位置的偏差不大于5mm测7、轨道顶面对其设计位置的纵向倾斜度不应大于1‰,每2m 测一点全行程内高底差不应大于10mm 。
MHC150_移动式多用途港口起重机电气设计
MHC150移动式多用途港口起重机电气设计罗佩玉 施宇雷上海振华重工(集团)股份有限公司 上海 200125摘 要:为实现港口码头移动式多功能起重机的技术应用和发展,文中叙述了MHC150移动式港口起重机的主体机构、工作原理、供电电源选型、主机构变频驱动系统选型、PLC通讯系统、抓斗/吊钩/吊具作业模式的电气控制系统、液压系统与电气通讯接口等的设计。
该起重机实现了抓斗、吊钩、吊具集装箱的多种组合装卸功能,在起重机投资、适应性、维修费用和附属设施等方面比中小型岸边集装箱起重机和门座起重机具有更好的经济性和应用市场前景,可作为其替代产品。
关键词:移动式港口起重机;吊具;电气控制;选型;设计中图分类号:U653.921 文献标识码:B 文章编号:1001-0785(2024)06-0053-06Abstract: To drive the technology application and development of the mobile multi-purpose crane in the port terminal, the design of the main mechanism, working principle, power supply selection, frequency conversion drive system selection of the main mechanism, PLC communication system, electric control system of grab/hook/spreader operation mode, hydraulic system and electric communication interface is introduced. Port crane has a variety of combined loading and unloading functions of grab, hook and spreader containers. Compared with small and medium-sized quayside container cranes and portal cranes, it has better economy and market prospects in terms of investment, adaptability, maintenance costs and ancillary facilities, and can be used as a substitute product.Keywords:mobile port crane; spreader; electrical control; type selection; design0 引言移动式港口起重机是一种广泛应用于港口集装箱、杂货及散货等吊运的可方便转场的多用途起重设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本单 位 的桥 式起 重机 系统 采用 接触 器来控 制 主 回路 的启 动 、 停 止 、限 位 开关 限位 。使 用 凸 轮控 制 器控 制转 子 回路 所 串 电阻 的大小及定子 回路的正反转控制来实现大车 、小 车、的前进 、 后退 、零 位 、加 速 、减 速 。主 令控 制 器 的控制 是 由主 接触 器 通 过时 间继 电器逐 级 的改变 所 串 电阻 的 大小来 实 现抓 斗 的 提 升下 降及 开合 的加 速 及减 速等 动 作 。并 且各 电机 均 设 电磁 抱 闸装 置 刹车 。其 中抓 斗 电机 串有 3 级 电阻 ( 分别由 3 个 时 间 继 电器 与 接触器 配合 进 行 ) 。大 车小 车行 走 电机 串有 5 级 电阻 ( 凸轮 控制 器的触 点转 换 实 现的 ) 。 由于 电动机 的工作 电流 直接 通 过 凸轮控 制器 的触 点 , 所 以开 合 时容 易 出现 冲 击 电流 , 极 大 的减 少 了接 触器 触点 的寿 命 。转 子 串 电阻 的调 速 方式 也使 所 串 电阻 长 期发 热, 极易烧断 , 极 大 地浪 费 了 电能 的 同时 也降 低 了 效率 。再 因 工作的环境差 , 粉尘 、腐蚀性气体极易对电动机转子回路滑环、 碳刷 及 主 回路 接 触 器触 点进 行 腐蚀 及 增 大接触 面 的 电阻等 。 随 之而来的故障率高更换频繁。而且操作面板上 的控制开关种类 繁多 , 很 容 易出 现误操 作 。 我厂 的桥 式 起重 机 电气 部 分 主要 由 5 台 电机 组 成 : 大 车行 走 电机 ( 1 l k W× 2) 、 小 车行走 电机 ( 3 . 7 k W) 、 抓 斗起 升 电机 ( 2 2 k W )及 抓斗 开合 电机 ( 2 2 k W) c经分 析改造 后 可 以用 4台变频 器 传动 , 并 由 4台 P L C分 别 加 以控 制 ( 可 编程 控制 器 控 制 电动 机 的 正 、反 转 、调 速等 控 制 信 号进 入 P L C , 经程序处理后 , 向 变频器发 出起停 、调速等信号 , 使电动机工作 , 是系统的核心。 变频 器是 为 改变 电动机 电源 的频 率从 而实现 电动 机 的调 速 ) 。制 动电 阻是 起 重机 放 下 重物 时 , 由于重 力 加速 度 的原 因电 动机 将 处于再 生 制 动 状态 , 拖 动 系统 的动 能要 反馈 到 变频 器 直 流 电路 中, 使 直 流 电 压不 断 上升 , 甚 至达 到危 险 的地 步 。 因此 , 必 须 将 再生 到 直 流 电路 里 的能 量 消耗 掉 , 使 直流 电 压保 持 在 允许 范 围内 。制 动 电阻 就是 用来 消耗这 部分 能量 的。 P L C控 制 的桥式起 重机 变频 调速 系统框 图如 图所 示 。 从 技 术改 造 的 目的 出发 , 首先 要 考 虑最 大 限度 地 利用 原 有 设 备 和 器件 , 用 最 小 的投 入 产生 最大 的经济 效 益 。原 有 系统 中
Y R&D
桥 式抓斗起重机 电气控制 系统
孙 健
( 沈 阳新 北电有 限 责任公 司 。 辽宁 沈阳
1 1 0 0 0 0 )
摘 要 改造 新 北热 电厂 上煤 系统 中最重要 的设 备 , 本单位 采 用桥 式抓 斗起 重机 把 煤抓 到给煤机 上 , 然后 经 过 3 段 皮 带输 送到 煤仓 内供 给锅 炉。我厂桥 式起 重机 的 电控 系统 采 用老 式的转 子回路 串接 电阻进行 分级调 速 , 控 制 器件繁 多 , 继 电 器 、接 触 器控 制 系统 可 靠性差 , 操作 维修 复杂 , 故障 率 高。 因此在 电气控 制 上应 采 用平滑 的无 级调 速是 解 决 问题 的根本 所以根据 变频器、P L C 被广泛应用在行车上所表现 出的优 良性能 , 故对我公司非常重要的上煤 系统 中二 台5 t 轻V 4 7 型 物料容 重 :≤ 0 . 9 2 吨/ 立方 米 ,自重 2 4 1 9 k g 桥 式抓斗 起 重机 电气控 制 系统进行 了改造 。 关 键 词 抓斗起 重机 ;电动机 ;电气 控制 系统 ;变频 器 中豳分 类号 : T H 2 1 5 文献标 识码 : h 文章 编号 : 1 6 7 1 —7 5 9 7( 2 0 1 3 )0 3 1 — 0 6 2 — 0 1
本不变 , 调速 性 能好 。当 车行 走到 终 端或 与 另 一 台相 近时 , 两
端 各 设 有挡 块 , 撞 上位 置 开 关 , 同时 切 断 电路 , 车 行走 电动 机 停 车并 制动 。避免 发 生冲撞 事故 。 改 造后 变频 系统 与 常 规 电气控 制 方案 相 比 , 省 去 了 电动 机 转 子 侧 的 大 功率 电阻 、接 触 器 、时 间 继 电 器 、过 流继 电器 等 , 降低 维 护量 7 0 %以上 , 并延 长 了电动 机 的使 用 寿命 。采用 变 频 调速 控 制 , 省去 了操 作面 板 上繁 多 的控 制 开关 , 操 作 方式 与原 有 的一 致 , 但在 变 频 控制 方 式下 的桥 式 起重 机 变 频调 速控 制 更 安全 、精确 和有 效 。在 变 频 控制 方式 下 , 电气 制 动与 机械 制 动 相结 合 , 制 动平 稳 可 靠 。加 减速 平 滑 , 使振 动 和 冲击 变 小 , 提 高 了安 全性 能 。无 需 采用 笨 重 的机 械变 速 装置 , 减少 了机 械 方 面 的故 障率 。 经 过一 段时 间 的试运 行 改造 后 的桥 式 起重 机 故 障率 大 大减 少 , 也 不 再 出现 启 动 、加 减 速过 快 过 猛 而造 成 的钢 丝 绳 断 裂 、 大 小 车突 然 断电 跑 出轨 道 、吊斗大 臂 弯断 等 现象 , 大 小 车 凸轮 控 制 器各 个触 点 的使 用 寿 命也 大 大加 强 了 。节 能降 耗 明显 。减 少 节 省维 护 维修 的 费用 ; 提高 了设 备 的运 行 率 , 保证 了生 产 的 正常 运行 , 经济 效 益显 著 提 高。改 造 前后 , 经一 段 时 间试 运 行 的统 计 数 据 , 可节省电费约 1 6 0 0 0元 / 月 , 电气 机 械 维 护 费 用 可节省 1 0 0 0 0 元, 月 。 提高 了设 备运 转 率 , 有效 解 决 了因 桥 式 起重机 故 障造成上 煤 不及 时影响 生产 的问题 。