基于ADAMS的双横臂悬架的仿真及优化
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
基于ADAMS_CAR的双横臂独立悬架建模与仿真
(Colle ge of Auto m otioe engineering , Jilin unioersit y , Changchun 130022 , China )
Abstract : A double w ishbone suspensi on model of a pickup was built usi ng ADAM S/ CAR . The ki ne matics of t he suspensi on was uncovered base on t he general t heor y . The experi mental results show t hat t he antidi ve/ anti-lift 、 ri de rate and t otal roll rate perf or mance are i mproved re mar kable by putti ng 20 mm down t he low control ar m f ront poi nt connected to t he body . Key words : auto moti ve engi neeri ng ; double w ishbone suspensi on ; si mulati on model ; ki ne matics ; ADAM S/ CAR
转向角变化曲线 S teeri ng angle curve
图12 F i g .12
轮距变化曲线 W heel track curve
从上述悬架特性参数的仿真结果可以看出: 轮距变化量等多项特性指标都满足设计 !前轮定位角、 要求; 抗点头 / 抗抬头效应较差; 悬架刚度和侧倾角刚度在车轮上跳时迅速降低。 " #
利用ADAMS_car对双横臂悬架的动态仿真与分析
利用ADA M S/car对双横臂悬架的动态仿真与分析黄杰文,黄菊花(南昌大学机电工程学院,南昌330031)摘要:利用ADAMS/car软件对样车建立双横臂悬架仿真模型,并对后倾拖距、磨胎半径、侧倾中心、四个定位角和车轮跳动量进行动态仿真。
通过对仿真结果与样车悬架相应参数进行比较,验证了仿真模型的动特性与样车悬架动特性的一致性。
其结论对汽车悬架的设计与开发具有一定的参考价值。
关键词:ADAM S/car软件;双横臂;动态仿真中图分类号:TP39119 文献标识码:A 文章编号:1671—3133(2010)03—0127—05D ynam i c si m ul a ti on and ana lysis of double w ishbone ba sed on ADA M S/carHUANG J ie2wen,HUANG Ju2hua(Electrical and Mechanical Engineering College,Nanchang University,Nanchang330031,China) Abstract:The si m ulati on model of double wishbone sus pensi on of sa mp le vehicle was established using ADAMS/car s oft w are,and dyna m ic si m ulati ons of sus pensi on trail,scrub radius,r oll center,f our orientati on angles and wheel ju mp ing was done.The si m ula2 ti on result was compared with the corres ponding para meters of sa mp le vehicle sus pensi on,and it was als o verified that dyna m ic characteristics of si m ulati on model and samp le vehicle sus pensi on are consistent.The conclusi on has certain reference value for the design and devel opment of vehicle sus pensi on.Key words:ADAMS/car;double wishbone;dyna m ic si m ulati ons0 引言悬架是现代汽车上的重要总成之一,它把车架(或车身)与车轴(或车轮)弹性地连接起来,主要功能是传递作用在车轮和车架(或车身)之间的一切力和力矩,并且缓和由不平路面传给车架(或车身)的冲击载荷,削弱由此引起的承载系统的振动,以保证汽车平顺地行驶[6]。
基于ADAMS的悬架系统动力学仿真分析与优化设计

基于ADAMS的悬架系统动力学仿真分析与优化设计摘要:本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,应用动力学仿真技术,研究了悬架系统在不同工况下的动力学性能,并进行了相应的优化设计。
仿真结果表明,通过优化设计,悬架系统的动力学性能得到了明显的提升,进而提高了整车的操纵稳定性和行驶舒适性。
1. 引言随着汽车工业的发展,悬架系统的性能对于整车的操纵稳定性和行驶舒适性起着至关重要的作用。
因此,对悬架系统进行动力学仿真分析和优化设计具有重要的理论意义和工程应用价值。
2. 悬架系统模型建立首先,根据悬架系统的实际结构和工作原理,建立了悬架系统的运动学和动力学模型。
模型包括弹簧、减振器、转向杆等各个部件,并考虑了车轮与地面之间的接触力和摩擦力。
通过ADAMS软件的建模工具和功能,对悬架系统进行了准确地建模。
3. 悬架系统动力学仿真基于悬架系统的模型,进行了不同工况下的动力学仿真分析。
通过设定不同的工况参数,如路面不平度、悬架系统参数等,研究了悬架系统在不同路况下的动力学性能。
仿真结果显示了悬架系统的悬架行程、车体加速度、横向加速度、滚动转矩等关键参数的变化规律。
4. 悬架系统优化设计根据悬架系统动力学仿真的结果,对悬架系统进行了优化设计。
通过改变悬架系统的参数和结构,优化了悬架系统的动力学性能。
具体而言,通过增加弹簧刚度、调整减振器阻尼等方式改善了悬架系统的行程和刚度特性。
通过优化悬架系统的参数,达到了提高整车操纵稳定性和行驶舒适性的目的。
5. 结果与分析通过悬架系统动力学仿真和优化设计,得到了悬架系统在不同工况下的性能变化趋势。
仿真结果表明,通过合理的优化设计,悬架系统的行程和刚度均得到了明显的改善。
同时,整车的操纵稳定性和行驶舒适性也得到了显著提升。
6. 结论本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,进行了不同工况下的仿真分析,并进行了相应的优化设计。
基于ADAMS的双横臂前悬架的虚拟设计及优化

基于ADAMS的双横臂前悬架的虚拟设计及优化
鲁春艳
【期刊名称】《机电产品开发与创新》
【年(卷),期】2009(022)002
【摘要】基于ADAMs软件对某双横臂前悬架进行了虚拟建模和运动学仿真分析,分析了前轮定位参数及车轮侧向滑移量随车轮上下跳动时的变化规律,评价了悬架数据的合理性;以车轮侧向滑移量和四个车轮定位参数为设计目标对悬架的结构关键点进行了优化分析,使该悬架的运动学特性更符合理想设计值,提高了产品的开发质量.
【总页数】3页(P122-124)
【作者】鲁春艳
【作者单位】苏州市职业大学,机电工程系,江苏,苏州,215104
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于ADAMS的FSAE赛车双横臂前悬架优化设计 [J], 杨岳;邹铁方
2.基于Adams的FSAE赛车双横臂前悬架建模与优化 [J], 孙明浩
3.基于ADAMS的双横臂式前悬架的仿真分析与优化 [J], 郑超;吴晓君;路超
4.基于ADAMS的FSAE赛车双横臂前悬架的优化 [J], 程浩;李耀平;龚航;胡立伟
5.基于ADAMS的双横臂前悬架参数优化设计 [J], 王琳; 韦鹏; 梁玉瑶
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS的FSAE赛车双横臂悬架的仿真优化

1 双 横 臂独 立悬 架仿 真模 型 的建 立 悬 架 的 建模 主 要 是 在 ADAMS / C a r 模 块 中完 成
图 1 双 横 臂 独 立前 悬 架模 型
的, 为 了建模 的方便 , 应 对 前悬 架系统 进行 适 当简化 和 假设_ 5 ] : ① 悬架 中 除橡 胶 元件 和 弹性元 件外 , 所有 零部 件 都认 为 是刚体 , 同时 零 部 件 之 间 的所 有 连 接 都 简化 为铰接 , 内部 间隙不 计 ; ② 认 为左 、 右两 侧 非 悬挂 质 量 系统相 同 , 关 于赛车 纵 向 中分面对 称 ; ③车轮 上下 跳动 时, 假 设 车身相 对 于地 面是 静止 的 , 即没有上 下位 移 。 从 机 械实物 或者 C AD软 件 中获取 硬 点 的 空 间坐 标, 给 机械 系统 建立 运 动 部 件 、 施 加 相应 的约 束 , 并 定 义模 型 中的相关 部件 、 弹 性元 件 、 铰 链及 相应 的外界 条 件, 从 而建立 起 机械 系统 的运 动学 模型 , 如图 1 所示 。
一
1 . 66 6 3 。 ~ 一 0. 5 7 8 6 。 。
基 于 ADAMS的 F S AE赛 车双 横 臂 悬 架 的仿 真优 化
柳 威 ,师 忠 秀 ,于 渊 ,王甜 甜
( 青 岛大 学 , 山东 青岛 2 6 6 0 7 1 )
摘 要 :在 AD AMS / C a r 模 块 中建 立 F S AE赛 车双 横 臂 悬 架 模 型 ,对 模 型 进 行 运 动 学 仿真 ,分 析 仿 真结 果 ,确
运 动学性能得到改善。
关 键 词 :F S AE赛 车 ;AD AMS )双 横 臂 独 立 悬 架 ;建 模 仿 真 ; 优 化 分 析
wgx-基于ADAMS双横臂式独立悬架的仿真设计
基于ADAMS双横臂式独立悬架的仿真设计摘要:双横臂独立悬架是常用的悬架形式之一,在汽车领域内有着广泛的应用,要求具有稳定可靠的性能。
其突出优点在于设计的灵活性,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
本文应用多体动力学软件ADAMS/View建立了某轻型汽车的前双横臂式独立悬架模型,进而进行运动学分析,得到了上横臂长度主销长度、上横臂在汽车横向平面的倾角、下横臂长度和下横臂在汽车横向平面的倾角的值最终优值,从而为设计和改进提供快速、可靠的技术依据,达到大幅度降低设备研制成本,大大降低了轮胎的磨损情况的目的。
关键词:ADAMS 双横臂独立悬架车轮定位参数建模运动学仿真分析引言随着科学技术的发展,计算机辅助设计技术越来越广泛的应用在各个领域。
现在,他已经突破了二位图纸电子化的框架,装向三维实体建模、动力学模拟仿真和有限元分析为主线的虚拟样机制作技术。
使用虚拟样机制作技术可以在设计阶段预测产品的性能,优化产品的设计,缩短产品的研制周期,节约开发费用。
机械系统动力学仿真分析软件ADAMS可以直接创建完全参数化的机械系统几何模型,也可以使用其它CAD软件(如:Pro/ENGINEER)传过来的造型逼真的几何模型;然后,在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最优设计。
目前不等长双横臂式悬架已广泛应用在轿车的前后悬架上,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
采用运动学原理和空间解析几何的方法,可以分析双横臂独立悬架的空间运动和前轮定位参数下轮胎的运动,提出轮胎磨损的评价指标,从而可以建立双横臂独立悬架的运动、前轮定位参数与轮胎磨损间关系的数学模型。
同时可以研究双横臂独立悬架初始状态和定位参数对轮胎磨损的影响以减少轮胎磨损。
基于ADAMS的双横臂独立悬架仿真与优化
o a
已
一
\ \
\ \ \
05
E
0
・
'0
\
\ \
\
1 5
在A D A M S 建模 过程中 ,悬架坐标 系采 用车身坐标系 ,坐标 系原 点为前轮轮 心连线 中点 , x轴 向后 , Y轴 向右 ,z轴向上 。由于双 横 臂前悬架左 右对称于 汽车纵 向平面 , 因此只创建 1 / 2 的悬架模型 ,在 A D A MS / C A R中建立模 型如图 1 所示 。
位参数在合理 的范 围内变动 】 。 倾 角在 车轮 上跳 时 为 一 2 . O ( 卜 _ o . 5 O之 间较 为合 理。仿 真结果 如 图 2所
2 双横臂独立悬架模型建立
2 . 1 双横臂独立前悬架拓扑结构 在双横臂独立前悬架 系统 中主要有上摆臂 ( U C A) 、 下摆臂 ( L C A) 、 转 向节 ( k n u c k l e )、转 向拉杆 ( T i e R o d )、测试台 ( Te s t P l a n e )、地
优化 设计 以及研究 其整车稳态转 向性 能 , 改进 汽车的整车性 能 以及提 想 的运 动特性 。
高 整车 质量 具有重 要意 义。本 文运 用 MS C . A D A MS 软 件建 立悬 架动 3 . 1 车轮 外倾角 的变化 力学模型 ,分析 其车轮 上下 跳动 时 ,对 四轮定位 参数 的影 响 ,通过 前 轮外倾角具有提高转 向操纵 轻便 性和车轮工作安全性 的作 用 , A D A MS / I NS I G H T与 A DA MS / C A R联合进 行优 化 ,使悬 架 的四轮定 但 是外倾角不 宜过大 ,否则会使 轮胎产生偏磨 损 , 现代 汽车 中一般 外
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如 图 3 6所 示 。 ~
委
证
军 轮 行 程/ mm
图 6 前 轮 前 束 角 随 车轮 跳 动 曲线
基 u 娶
摇 + H
由图 6可看 出 : 轮前 束 角 的初 始值 为0 O 1; 前 . 1。 随着 车 轮 的 跳 动 , 值 的 变 化 范 围 为 一 1 3 9 ~ 其 .0。
对 优化 前 后 车 轮定 位 参 数进 行 对 比, 结果 如 图
7 1 ~ O所 示 。
援
坚 l 1 娶
+ H
要求 车轮 从 满 载 位 置 起 上 下 跳 动 ±5 0 mm 的 范围内, 车轮 外倾 角 变化 在 1以 内 。从 图 9可 以 看 。
出: 优化后 , 双横臂 独立 悬架 的 车轮外倾 角 的初始 值
ml。表 3为优 化后 悬架 的部分 硬 点坐 标 。 T l
车 轮行 程 / m a r
表 3 双 横 臂 独 立 悬 架 优 化 后 硬 点 坐 标
图 4 主 销 内 倾 角 随 车 轮 跳 动 曲 线
mm
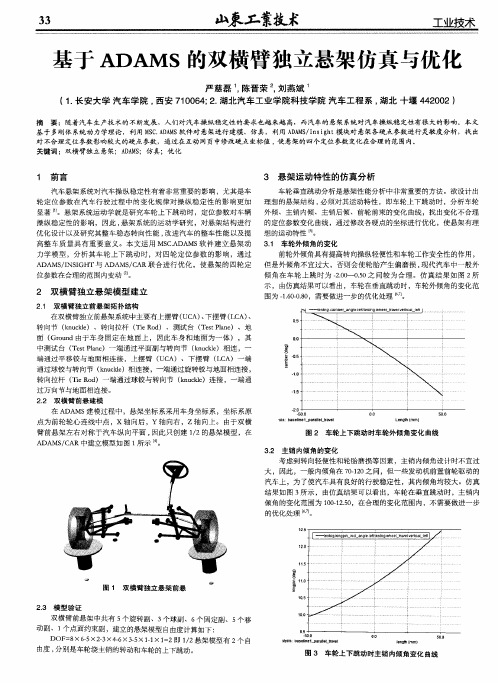
由图 3可 以 看 出 : 销 后 倾 角 的 初 始 值 为 主
5 3 75 ; . 6 。主销 后倾 角 随 车 轮上 跳 而增 加 , 变 化 范 但
[] MS . u n gss es naayi: es n2 0 . . 6 C R n i up ni nls V ri 0 7 1 0 n o s o
图 9 前 轮 外 倾 角 优 化 前 后 对 比
援
{∈ 珏 淀
辞 控
[] z.
[] 王 南 , 晶 , 恩 顺 . 于 AD 7 王 平 基 AMS C r 双 横 臂 悬 架 /a的 的运 动 学 建 模 与仿 真 [] 河 北 工 程 大 学 学 报 : 然 科 J. 自
k , 心高 度 为 3 0mm, g质 0 轴距 为 27 5mm, 轮传 6 前 动 比为 1 0 , 轮 制 动率 为 6 。建 立 的双 横 臂 0% 前 4
独 立悬架 模 型如 图 1 示 。 所
图 1 双 横 臂 独立 悬 架 模 型
2 双 横 臂 前 悬 架 的 仿 真 分 析
为 一0 0 94 , 化 范 围为 一 0 6 8 ~ 0 2 4 , 均 . 7 。变 . 8。 . 6。平
车 轮 行程 / m a r
值 为 一0 142 , 化 量 由 原 来 的 1 9 5 减 小 到 .2 。变 . 5。
图 7 主 销后 倾 角 优 化 前 后 对 比
0 9 2 , 少5 . , . 5 。 。符合 设计 要求 。 . 5 。减 1 3/ 且0 9 2<1 , 9 6
的应用 [ ] 北京 : D. 清华大学 ,9 7 19. [ ] 李军 , 4 刑俊 文 , 覃文 洁 , AD 等. AMS实 例教 程[ . M] 北
京 : 京 理 工 大 学 出版 社 ,0 2 北 20. [] 贾 长 治 , 军 辉 , 文 星 , . D 5 殷 薛 等 MD A AMS虚 拟 样 机 从 入 门到 精 通 [ . 京 : 械 工业 出版 社 ,0 0 M] 北 机 21.
警
电、
摇
—
-
-
—
பைடு நூலகம்
车 轮 行程 / m m
-
图 5 前 轮 外 倾 角 随 车 轮 跳 动 曲线
时I s 司/
左 右 轮 曲 线 重合 , 下 的 图相 同 。 以
一
图 2 运 动 激 励 曲 线
22 悬架仿真结果分析 .
对 所建 立 的双 横臂 前 悬 架 模 型进 行 分 析 , 果 结
图 8 主 销 内 倾 角 优 化 前 后 对 比
坐 标 , 该悬 架性 能得 到 了较大 幅度 的改善 。 使
参 考文 献 :
援
坚
电 、
[ ] 蔡 兴 旺 . 车 构 造 与 原 理 ( 册 ) 底 盘 、 身 [ ] 北 1 汽 下 : 车 M .
京 : 械 工 业 出版 社 , 0 4 机 20.
双横 臂悬架 是 一 种 通 过上 、 下摆 臂 将 车 轮 和 车
表 2 双 横 臂 前 悬 架 的定 位 参 数
身连接 起来 的独 立悬 架 , 两个 摆臂 长度可 以相 等 , 也
可 以不 相 等 。在 摆 臂 不 等 长 的独 立 悬 架 中 , 两 臂 如 长度选 择适 当 , 以使 车轮 和 主 销 的角 度 及 轮 距 的 可 变化都 不太 大 。 因此 , 等 长 的 双横 臂 式 独 立悬 架 不 在轿 车 、 型汽 车 的前轮 上应用 较 广泛 。 轻 该 文 以 某 轿 车 的 前 悬 架 为 研 究 对 象 , AD 以 ~ AMS C r / a 为平 台 , 双横 臂 前 悬 架 进行 建 模 、 对 仿真 分析 和优 化设计 。
耀
[ ] 吉 林 大 学 汽 车 工 程 系. 车 构 造 ( 册 ) M] 第 5版 . 2 汽 下 [ .
北 京 : 民交 通 出版 社 , 0 6 人 20 .
[ ] 张越 今 . 体 动 力 学 在 轿 车 动 力 学 仿 真 及 优 化 研 究 中 3 多
车 轮 行 程/ mm
图 2所 示 ) 。
5 0 4 0 3 O 2 0 1 O O l O 2 0 3 0 4 0 5 0
随着 车 轮 的 跳 动 , 值 的 变 化 范 围 为 ~ 1 2 4 ~ 其 . 1。
0 7 1 , 大 , 剧 了轮胎 的磨 损 , 要 改进 。 . 4 。过 加 需
摘 要 :为 缩 短 设 计 周 期 、 高产 品 质 量 并 降 低 产 品 开 发 成 本 , 中利 用 AD 提 文 AMS软 件 建 立 汽
车 双 横 臂 独 立 悬架 模 型 并 进 行 仿 真 分 析 , 究 了车轮 定位 参 数 随 车 轮 跳 动 的 变 化 规 律 , 据 此 对 研 并
援
坚
器 + H
减 小到 2 4 7 , . 3 。 减少 3 . 。优 化后 前束 值 变化 幅 13
度有 所减 小 , 更接 近理 想值 。 比较 上述 几 个前 轮 定 位 参数 可 以看 出 , 横 臂 双
车 轮 行程 / m r a
独立 悬架 的优化 结果 总体较 好 。通过调 整悬 架硬 点
车 轮行 程 , mm
学 版 ,0 0 2 () 2 1 ,7 4 .
图 1 前 轮 前 束 角 优 化 前 后 对 比 O
[] 宋 传 学 , 章林 . 于 A MSC R 的双 横 臂 独 立 悬 架 8 蔡 基 DA / A
要 求 主销 后 倾 角 不 超 过 4 ~ 6。从 图 7可 看 。 。
公 路 与 汽 运
总 第 1 6期 4
Hih y g wa s& Au o tv plc to s t moi eAp ia i n
9
基 于 AD AMS的双横 臂 悬 架 的仿 真及 优 化
罗 鑫 源 ,杨 世 文 ,杨 军 ,王 拖 连
( 中北 大 学 机 电 工 程 学 院 ,山 西 太原 005) 3 0 1
1 双 横 臂 前 悬 架 模 型 的建 立
双 横 臂 前 悬 架 各 定 位 点 数 据 和定 位 参 数 如表
1 表 2所 示 。 、
表 1 双 横 臂 前 悬 架 各 主 要 位 置 点 的 坐 标 mm
为 2 0N/ m, 0 r 车轮 质量 为 1 g 簧上 质量 为14 0 a Ok , 0
参 数 名 称
主 销 内倾 角 / 。 ()
主销后倾角/。 ()
参 数 值
参 数 名 称
参 数 值
0 O .l
l.0 前轮前束角/。 O0 ()
54 .0
前 轮 轮 距 / m 16 0 a r 0
前轮外倾角/。 () 一 O O .8
建 立 双横 臂 前 悬 架模 型 分析 总成 , 关 的 车辆 相 参 数如下 : 胎 自由半 径 为 3 0 mm, 轮 0 轮胎 垂 向刚度
.
建模与仿 真[] 吉林大学学报 : J. 工学版 ,0 43 () 20 ,44 .
由图 5可知 : 轮 外倾 角初 始 值 为 一0 0 92 ; 前 . 7 。
公 路 与 汽 运
总 第 1 6期 4 3 3 悬 架 优 化 设 计 结 果 .
Hih y g wa s& Au o tv plc to s tmo i eAp ia in
从 图 8可 以看 出 : 化后 , 优 双横 臂独 立悬 架 的主销 内 倾 角 的 初 始 值 为 7 8 8 2 , 化 范 围 为 7 4 2 ~ . 9 。 变 . 1。 8 5 2, . 9 。平均 值为 7 9 3 5 , 于 8 , 化 量 由原 来 . 3 。小 。变 的2 2 1减 小 到 1 1 0 , 少 4 . , 合 要 求且 .9。 . 8。减 8 5/ 符 9 6 优 化后 变 化 范 围比优化 前得 到改善 。
要 求在 车 轮 跳 动 时 , 轮 前束 角 变 化量 越 小 越 前 好 。如 图 1 O所示 , 优化 后 , 横 臂独 立 悬 架 的前 轮 双 前束 角 的初 始值 为 0 0 1 , 化 范 围为 一0 7 4 ~ . 1 。变 . 9。 1 6 3 , 均值 为 0 1 43 , 化 量 由原 来 的 3 5 8 . 4 。平 . 5 。变 .4 。