第三节提升设备运动学计算
矿山机械与设备,第五章提升系统1
(5)用于高温和有明火的地方,如煤矿矸石山等, 应选用金属绳芯钢丝绳。
(6)绳罐道和凿井提升绳应选用不旋转绳。
第二节 提升钢丝绳的选择计算
我国是按《煤矿安全规程》的规定来设 计的,其原则是:钢丝绳应按最大静载荷并 考虑一定的安全系数来进行计算。 安全系数是指钢丝绳钢丝拉断力的总和 与钢丝绳的计算静拉力之比。
钢丝绳系列
钢丝绳的标记代码
绳股:圆股不用代号标记。 “V”表示三角股; “Q” 表示椭圆股; “T”表示面接触钢丝绳;“S ”表示西鲁 式钢丝绳;“W”表示瓦林吞式钢丝绳;“SW”表示西 鲁—瓦林吞式钢丝绳;“FI”填充式钢丝绳;
钢丝绳强度:1570 1670 1770 1960等等
钢丝绳股中的标记代号
第二章 提升钢丝绳
提升钢丝绳是矿井提升设备的一个重 要组成部分,提升钢丝绳选择是否合理是 关系到提升设备安全可靠性和经济性的重 要环节,应引起足够的重视。
第一节 提升钢丝绳的结构、分类和选择使用
一、提升钢丝是丝→股→绳结构,即先 由钢丝捻成绳股,再由绳 股捻成绳,提升钢丝绳各 部分名称如图所示。
钢丝绳完整的表示方法
18 NAT 6×19S+FC 1770 ZS GB/T20118-2006
产品执行标准(一般用途) 钢丝绳捻向(右交互捻) 公称钢丝抗拉强度(MPa)
每股钢丝数17根
钢丝绳结构(西鲁式、麻芯)
股数6股
钢丝绳表面状态(光面) 钢丝绳公称直径
钢丝绳系列
三、提升钢丝绳选择使用
选择原则是:绳的捻向与绳在卷筒上的缠绕螺旋线 方向一致。我国单绳缠绕式提升机多为右螺旋缠绕,故 应选右捻绳,目的是防止钢丝绳松捻;多绳摩擦提升为 了克服绳的旋转性给容器导向装置造成磨损,一般选左、 右捻各一半。
提升机电动机轴功率的计算
提升机电动机轴功率的计算提升机电动机轴功率的计算,一样先用估算法,预选出电动机的功率,然后进行运动学和动力学计算,做出速度图和力图,最后按等效劳值法进行校验。
一、张力插值法张力插值法是一种估算法,适用于斜井提升,可依下式计算id v F P η10002.1max = (1-4-1) 式中 P —电动机轴功率,kw ;F d —实际利用的最大静张力差,N ;max v —最大提升速度,m/s ;i η—减速机传动效率,直联传动时取1。
二、动力系数法动力系数法也是一种估算法,适用于立井提升机,依下式计算iT 1000KQH 81.9P ηρ= (1-4-2) 式中 P —电动机轴功率,kw ;K —矿井阻力系数,罐笼提升取;容量在20t 以下的箕斗提升取;容量为20~50t 带转动罐耳的箕斗多绳提升取;Q —有效提升重量,kg ;H —提升高度,m ;T —除停止时刻外的纯运行时刻,s ;i η—减速机传动效率,直联传动时取1;ρ—动力系数,关于非翻转箕斗提升取~;关于翻转箕斗提升取~;关于罐笼提升取~;多绳提升设备取~。
选取ρ值时,不平稳提升系统比平稳提升系统要取得大一些,提升设备的运行部份的变位质量增加时要取大一些,最大提升速度较大时也应取大一些。
纯运行时刻T 可依下式计算θ-=hA Q 3600T (1-4-3) 式中 h A —提升机小时提升量,kg ;θ—停止时刻,s ;Q —有效提升质量,kg 。
三、等效劳值法等效劳值法是一种精准计算法,它经常使用来校验预选电动机的容量,并以此计算的功率作为选择标准电动机功率的依据,可依下式计算i maxeq 1000F P ηυ= (1-4-4)式中 P —电动机轴功率,kw ;max v —最大提升速度,m/s ;i η—减速机传动效率,直联传动时取1;eq F —等效劳,N 。
等效劳eq F 有以下关系式eq i 1i 2i eq T tF F ∑= (1-4-5)等效劳公式中根号内的分子可依下式求得:++++++=∑22222221211121i 1i 2i 3''''''3''''''F t F t F F F F t F F F …i i i i i t F F F F 3''''''22+++ 式中i i F F '''、—力图中各时期滚筒轮缘上的起点和终点托动力。
第八章__提升系统动力学与运动学

第一节矿井提升运动学一、提升速度图竖井提升速度图因提升容器的不同一般可分为箕斗提升速度图(六阶段速度图)和罐笼提升速度图(五阶段速度图)。
图5一l所示为常采用的交流拖动双箕斗提升系统六阶段速度图,因它具有六个阶段而得名。
速度图表达了提升容器在一个提升循环内的运动规律,现简述如下:图5-1 箕斗提升六阶段速度图(1)初加速度阶段t0 提升循环开始,处于井底装载处的箕斗被提起,而处于井口卸载位置的箕斗则沿卸载曲轨下行。
为了减少容器通过卸载曲轨时对井架的冲击,对初加速度a0及容器在卸载曲轨内的运行速度v0 。
要加以限制,一般取Vo≤1.5 m/s 。
(2)主加速阶段t1 当箕斗离开曲轨时,则应以较大的加速度a1运行,直至达到最大提升速度vm ,以减少加速阶段的运行时间,提高提升效率。
(3)等速阶段t2箕斗在此阶段以最大提升速度v m运行,直至重箕斗将接近井口开始减速时为止。
(4)减速阶段t3重箕斗将要接近井口时,开始以减速度a3运行,实现减速。
(5)爬行阶段t4重箕斗将要进入卸载曲轨时,为了减轻重箕斗对井架的冲击以及有利于准确停车,重箕斗应以低速v4爬行。
一般v4=0.4~0.5m/s,爬行距离v4 =2.5~5m。
(6)停车休止阶段t5当重箕斗运行至终点时,提升机施闸停车。
处于井底的箕斗进行装载,处于井口的箕斗卸载。
箕斗休止时间可参考表5—1。
图5—2所示为双罐笼提升系统五阶段速度图。
因为罐笼提升无卸载曲轨,故其速度图中无t0阶段。
为了准确停车,罐笼提升仍需有爬行阶段,故罐笼提升的速度图为五阶段速度图。
罐笼进出车休止时间参考相应手册。
二、最大提升速度由式(1-1)计算的经济速度v j ,并不是提升机的最大提升速度v m ,但值尽可能是接近值。
而最大提升速度值应如何确定呢?提升机的卷筒是由电动机经减速器拖动的。
提升机卷筒圆周的最大速度与电动机额定转数n e 及减速器传动比i 有关,其关系如下式所示:)/(60s m i Dn v em π= 5-1)式中:D 为提升机卷筒直径,m ;i 为减速器传动比, n e 为电动机额定转数,r /min 由式(5—1)计算的最大提升速度v m ,因每台提升机所选配的电动机转数的不同和减速器速比的不同而具有有限的几个数值,这有限的几个数值均称为提升机的标准速度—最大提升速度。
提升设备选型计算
提升设备选型计算第一节 提升设备一、主提升设备: 1.原始参数及物料特性本输送机为原煤运输带式输送机,输送机机长L=1450m ,为水平运输;输送能力Q=300t/h ,原煤松散密度ρ=1000kg/m 3,粒度a=360mm ,输送物料单位长度的质量q=41.67kg/m 。
2.初步设定参数输送机带宽B=1000mm ,带速V=2.0m/s ,输送带选用PVG1000S 阻燃防静电带,额定拉断力S n =1.0×106N ,每米胶带自重: q o =25.0kg/m 。
托辊槽角λ=45°,承载托辊直径φ=133mm ,L=380mm ,轴承为6305/C4。
回程托辊直径φ=133mm ,L=1150mm ,轴承为6305/C4。
承载分支托辊质量G tz =18.9kg ,承载分支托辊间距l tz =1.5m ;回程分支托辊单位长度的质量 G tk =16.09kg/m 。
回程分支托辊间距 l tk =3.0m ;则承载、回程托辊转动部分单位长度的质量96.17309.165.19.18=+=+=tk tk tz tz t l G l G q (kg/m) 3.输送机输送能力计算 Q n =3.6Svk ρ=3.6×0.1396×2.0×1×1000=1005.1t/h >300.0t/h 满足 式中:S —物料在输送带上的最大横截面积 查表取0.1396ω/m 2V —带速 2.0m/s k —折减系数 查表取 1 ρ—原煤松散密度 1000kg/m 3 4.输送带宽度确定B ≥2α+200=920mm ≤1000mm (最大粒度α=360mm )满足 5.圆周力及轴功率计算 输送机布置示意图下图所示:(1)圆周力计算F=C N fLg [q t +(2q o +q)cos β]+gqH 式中:C N —附加阻力系数 查表取1.07f —运行阻力系数 查表取0.03 L —输送机铺设长度 1450mg —重力加速度 9.8q t —承载、回程托辊转动部分单位长度的质量 17.96kg/m q o —每米长度输送带质量 25.0kg/m q —每米输送物料质量 41.67kg/m β—输送机倾角 水平运输 H —输送高度 水平运输 代入式中得: F=50006.7(N) (2) 轴功率计算P=10-3 FV =10-3×50006.7×2=100(kW) 6.电动功率确定驱动系统采用双滚筒双电机传动方式,每套驱动装置由电动机、限矩型液力偶合器、减速器、逆止器等组成。
第三节 提升设备的运动学计算
第三节 提升设备的运动学计算提升设备运动学的研究对象是研究和确定提升过程中提升容器运动速度的变化规律 ,以求得合理的运转方式。
提升设备运动学的基本任务是确定合理的加速度与减速度、各运动阶段的延续时间以及与之相对应的容器行程 , 并绘制速度图和加速度图。
由基本动力方程式 (8-5) 可知 , 拖动力是容器行程 Z 和加速度 a 的函数 , 而 Z 又是时间 t 的函数 , 因此拖动力 F 是 t 和α的函数。
由此可见 , 研究和确定滚筒圆周上拖动力的变化 规律 , 必须以提升运动学为基础。
本节以我国煤矿目前广泛采用的无尾绳静力不平衡提升系统为例 , 介绍提升设备的运动学计算的基本内容和方法。
一、提升设备的运行规律提升设备的运行状态 , 主要取决于提升容器在井筒中的运行规律。
而容器的运行规律与容器的类型及控制方法等有密切关系。
提升设备在一个提升循环内的运行规律是用速度图来表示的 , 表示提升速度随提升时间变化的关系图形 , 叫做提升速度图。
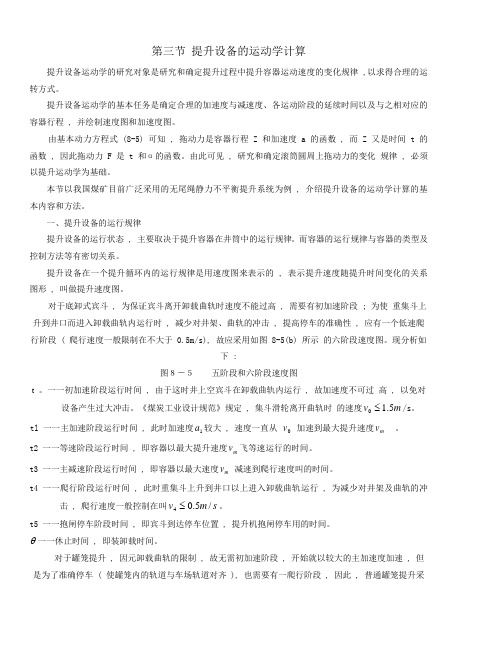
对于底卸式宾斗 , 为保证宾斗离开卸载曲轨时速度不能过高 , 需要有初加速阶段 ; 为使 重集斗上升到井口而进入卸载曲轨内运行时 , 减少对井架、曲轨的冲击 , 提高停车的准确性 , 应有一个低速爬 行阶段 ( 爬行速度一般限制在不大于 0.5m/s), 故应采用如图 8-5(b) 所示 的六阶段速度图。
现分析如下 :图8-5 五阶段和六阶段速度图t 。
一一初加速阶段运行时间 , 由于这时井上空宾斗在卸载曲轨内运行 , 故加速度不可过 高 , 以免对设备产生过大冲击。
《煤炭工业设计规范》规定 , 集斗滑轮离开曲轨时 的速度m v 5.10≤/s 。
tl 一一主加速阶段运行时间 , 此时加速度1a 较大 , 速度一直从 0v 加速到最大提升速度m v 。
t2 一一等速阶段运行时间 , 即容器以最大提升速度m v 飞等速运行的时间。
t3 一一主减速阶段运行时间 , 即容器以最大速度m v 减速到爬行速度叫的时间。
大型设备验算内容及公式

大型设备验算内容及公式一、 提升机1、 矿车钩头牵引力F公式:〕<〔N f Q Q ng F z 58860)cos )(sin (1εα++= 式中:F -矿车钩头牵引力,N ;n -一次提升矿车数量 Q -载荷重量,Kg ;z Q -提升容器自重,Kg-α井巷倾角,°;1f -绳端载荷的运动阻力系数,取0.010~0.015 -g 重力加速度,取9.81m/s 2 2、 提升机主轴强度验算 ⑴ 最大静张力F jm公式:N F f PL f Q Q gn F t z jm 〕<〔jm 21)cos (sin )cos )(sin (αααα++++= 式中:-jm F 提升机实际最大静张力,N ;-P 钢丝绳每米重量,N/m-t L 提升长度,m ;-][jm F 提升机设计需用最大静张力(查提升绞车规格表),N⑵ 最大静张力差F jc公式:〕<〔jc 2)cos (sin F f gnQ F F jm jc αα--=式中:-jc F 提升机实际最大静张力差,N ;-2f 钢丝绳阻力系数 -][jc F 提升机设计需用最大静张力差(查提升绞车规格表),N 3、 钢丝绳安全系数验算 公式:jmd F Q m =提人:〕>〔=9jmd F Q m ;提物:〕>〔=5.6jmd F Q m式中:-m 提升钢丝绳安全系数;-d Q 钢丝绳中所有钢丝破断拉力总和,N 4、 提升机运动学参数验算⑴ 提升系统总变位质量的计算 公式:)/.)(22(1221m s N G G G qL n pL n Q Q gm d j t q p z ++++++=∑式中:-∑m 提升系统总变位质量,kg ;-Q 一次提升载荷重量,N-z Q 提升容器自重,N ;-1n 主绳根数,单绳双滚筒缠绕式提升系统21=n -p 主绳每米重量,N/m ;-p L 每根提升主绳实际全长,m-2n 尾绳根数;-q 尾绳每米重量,N/m-q L 尾绳实际全长,m ;-t G 天轮的变位重量(查天轮规格表),N -j G 提升绞车(包括减速机)的变位重量(查提升绞车规格表),N -d G 电动机转子的变位重量,N ⑵ 速度图的计算 ① 最大提升速度 公式:iDnV m 60π=式中:-m V 提升机最大运行速度,m/s ;-n 电动机实际转速,r/min -D 滚筒直径,m ;-i 传动比② 串车在下、上平车场启动加速和终止减速运行公式:)(==S V 0050a t t ;)(==m 2l l 00250a V ;)(==m l l l l 0H 410- 式中:-0t 初加速时间,s ;-0l 初加速距离,m-5t 减速时间,s ;-5l 减速距离,m -10l 初加速阶段等速运行距离,m③ 串车在井筒中加、减速运行 公式:)(131S a V V t t m -==;)(2)(1031m t V V l l m +==式中:-1t 加速时间,s ;-3t 减速时间,s -1l 加速距离,m ;-3l 减速距离,m ④ 串车在井筒中等速运行公式:))((312m l l l l l l B H t +++-=,)(22S V l t m=式中:-2l 等速运行距离,m -2t 等速运行时间,s ⑤ 一次提升循环时间T x)(52431010S t t t t t t t T x θ+++++++=5、 提升机动力学参数验算⑴ 串车在井底车场运行,s m a /3.00= 初加速开始时:12110)cos (sin )cos (sin )cos )(sin (ma f nQ f PL f Q Q n F z z ∑+--++++=αααααα初加速终了时:αsin 2100PL F F -=' ⑵ 初加速阶段等速阶段初加速阶段等速开始时:0001ma F F ∑-'=初加速阶段等速终了时:αsin 2010101PL F F -=' ⑶ 加速阶段加速开始时:1011ma F F ∑+'= 加速终了时:αsin 2111PL F F -=' ⑷ 等速阶段等速开始时:312ma F F ∑-'= 等速终了时:αsin 2222PL F F -=' ⑸ 减速阶段减速开始时:523ma F F ∑-'= 减速终了时:αsin 2333PL F F -=' ⑹ 低速减速阶段低速减速开始时:534ma F F ∑+'= 低速减速终了时:αsin 2444PL F F -=' ⑺ 制动阶段制动开始时:045ma F F ∑-'= 制动终了时:αsin 2555PL F F -=' 6、 电动机功率验算⑴ 按发热条件验算公式:)(=KW T F P Tdt2im d d 102v ⎰η 等效时间:βθα+++++++25431010d t t t t t t )(=t T式中:a —考虑低速运转时电机散热不良系数,一般取21β—考虑停车间歇时间电机散热不良系数,一般取31βθα+++++++25413010d t t t t t t )(=t T5252542424323232222222121210120120102020022)(2)(2)(3)(2)(2)(2)(t F F t F F t F F t F F F F t F F t F F t F F d F Tt '++'++'++'+'++'++'++'+=⎰等效功率:][)(102max e id d P KW V F P <η=⑵ 按工作过负荷验算 公式:maxe 102V g P F i e η=;4.1mmax λλ≤=eF F式中: F max —力图中最大拖动力,Nλm —电动机的过负荷系数λmλ—过载系数,等于力图中最大力与额定力之比 7、 制动系统的验算 ⑴ 贴闸压力计算 公式:a JCt MP AnKF P 75.2=式中:-75.2换算系数-K 制动力矩计算倍数,根据质量系数C 计算。
管状电机提升力计算

管状电机提升力计算
(最新版)
目录
1.管状电机概述
2.提升力的计算方法
3.测试最大提升力的方法
4.结论
正文
一、管状电机概述
管状电机是一种将电能转化为机械能的装置,广泛应用于各种提升设备中。
在工程技术领域,计算管状电机的提升力是设计提升设备的关键环节。
二、提升力的计算方法
提升力的计算公式为:F = (T ×πD) / 4,其中 F 表示提升力,T 表示扭矩,D 表示管状电机的直径。
三、测试最大提升力的方法
要测试管状电机的最大提升力,可以使用弹簧秤进行测量。
具体操作步骤如下:
1.将弹簧秤挂在管状电机的轴上,确保弹簧秤的拉力从 0 开始。
2.启动管状电机,观察弹簧秤的刻度,记录下最大刻度。
这个最大刻度即为管状电机的最大提升力。
3.如果需要计算管状电机的堵转转矩,可以在电机停转时,记录下弹簧秤的拉力,再乘以电机此时的门帘半径,即可得到堵转转矩。
四、结论
通过以上分析,我们可以得出管状电机提升力的计算方法和测试最大提升力的方法。
提升设备的运转理论

一、斜井串车提升⑴
斜井串车提升使用矿车做提升容器,有单钩和双钩之分。 按车场型式可分为甩车场串车提升和平车场串车提升。
1.甩车场单钩串车提升
井口及井底均设甩车道。提升开始时,重车沿井底车场甩车道运行,由 于甩车道的坡度是变化的,而且又是弯道,所以初加速度asc≤0.3m/s2, 速度vsc≤1.5m/s。其速度图如图示。当全部重车进入井筒后以加速度a1加 速至最大速度vm之后以最大速度等速运行,到达井口停车点前,重车以减 速度a3减速,通过道岔A后停车,位置在栈桥停车点。搬动道岔A后,提升 机反向运行,重车以低速vsc沿井口车场甩车道运行,到停车点停车。然后 重车摘钩再挂上空串车。开动提升机把空串车以低速v0提过道岔A,又在 栈桥停车点,搬动 道岔A,然后提升 机反向运行,下放 空串车到井底车场 甩车道上,进行摘 挂钩,开始下一个 提升循环。
一、斜井串车提升⑶
3.平车场的双钩串车提升
提升开始时、在井口平车场空车 线上的空串车,由井口推车器向下推 送,同时井底重串车向上提升(与空车 运行速度相适应)。此时加速度为 a0≤0.3m/s2,速度为vpc≤1.0m/s。当 全部重串车进入井筒后,提升机加速 到最大速度vm,并以vm等速运行,重 串车行至井口附近,空串车行至井底 时,减速至vpc,到重串车进入井口平 车场,空串车进入井底平车场停车。 重串车在井口平车场内重车线上、靠 惯性继续前进,当钩头行至摘钩位置 时,迅速将钩头摘下,然后挂上空串 车。与此同时,井下也进行摘挂钩, 完成一个提升循环。
第五节
提升电动机容量的校核
由提升力图和速度图可以看出,在一次提升 循环中,提升机滚筒圆周上的拖动力、速度都是 变化的。初选的提升电动机,是否能满足要求, 要通过验算才能确定。验算内容按温升条件、过 负荷条件及特殊力条件分别进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-290·矿山运输弓摆开设备
功率及选择电气控制设备提供依据。
各类速度图所对应的动力学计算方法大致相同。基本方法是将计算出的各提升阶段的各个量代人提升动力学基本方程式,计算出提升过程中各阶段的拖动力。若把提升各阶段的始、终点的速度和拖动力代人功率计算公式,即可求出滚筒轴上的功率。
t。一一初加速阶段运行时间,由于这时井上空宾斗在卸载曲轨内运行,故加速度不可过高,以免对设备产生过大冲击。《煤炭工业设计规范》规定,集斗滑轮离开曲轨时的速度 /s。
tl一一主加速阶段运行时间,此时加速度 较大,速度一直从 加速到最大提升速度 。
t2一一等速阶段运行时间,即容器以最大提升速度 飞等速运行的时间。
(8-11)
式中
[Mmx]---减速器输出轴最大允许输出转矩,单位为N·m,可由提升机规格表5-14
查得
D一一滚筒直径,m。
综合考虑上述三个条件,按其中最小者确定主加速度 的大小。
三、提升减速度码的确定
提升减速度除了要满足上述《煤矿安全规程》的规定外,还与提升设备所采用的减速方式有关,目前常见的减速方式有三种。
式中,m——一次提升货物的质量,t。
提升设备的年实际提升量为
(8-25)
提升能力的富裕系数为
(8-26)
,
(8-21)
式中An--矿井设计年产量,t/年。
br一一年工作日数,日/年。
t一一每日提升小时数,h/d。
C一一提升不均衡系数。对于主井提升,一般有井下煤仓时取1.10~1.15,无井下煤
仓时c=1.2。,品"
(2)按电动机的过负荷能力来确定。电动机的最大平均出力应大于或等于加速阶段实际所需的最大力,即
(8---10)
式中Fe--一电动机的额定出力,N;
--电动机额定功率,KW;
--传动效率。
--电动机荷系数。
一一提升系统变位质量,kg。
(3)按减速器允许的输出传动转矩来确定。电动机通过减速器作用到滚筒主轴的拖动力矩,必须小于减速器所允许的最大输出转矩,即
滚筒轴上的功率,可以将各提升阶段始点和终点的力F与速度v代人下式,即可求出各提升阶段起点和终点的功率来。
(8-37)
。
同样根据式(8-37)计算出的各提升阶段的起点和终点的滚筒轴的功率后,也可以画出提升机滚筒的轴功率图。
二、提升加速度的确定
(一)萁斗提升初加速度 内的确定
如上所述,为了保证提升开始时,空萁斗对卸载曲轨及井架的冲击不致过大,离开萁斗卸载曲轨时的速度被限制在 /s,如果萁斗在卸载曲轨内的行程为 ,则萁斗的初始加速度
目前大量通用的集斗卸载曲轨行程为ho=2.13m,新标准系列宾斗的卸载曲轨行程为
2.35m,所以初加速度α。为
对于底卸式宾斗,为保证宾斗离开卸载曲轨时速度不能过高,需要有初加速阶段。为使重集斗上升到井口而进入卸载曲轨内运行时,减少对井架、曲轨的冲击,提高停车的准确性,应有一个低速爬行阶段(爬行速度一般限制在不大于0.5m/s),故应采用如图8-5(b)所示的六阶段速度图。现分析如下:
图8-5五阶段和六阶段速度图
对于副井,为了安全可靠,都应采用电气制动方式。对于多绳摩擦提升、斜井提升设备,则经常用电动机减速方式。
四、速度图参数的计算
速度图是验算设备的提升能力、选择提升机控制设备及动力学计算的基础。各类速度图的计算方法大致相同。
在计算速度图参数之前,必须已知提升高度H,最大实际提升速度 及速度图各主要参数 , 及 等。
第三节提升设备的运动学计算
提升设备运动学的研究对象是研究和确定提升过程中提升容器运动速度的变化规律,以求得合理的运转方式。
提升设备运动学的基本任务是确定合理的加速度与减速度、各运动阶段的延续时间以及与之相对应的容器行程,并绘制速度图和加速度图。
由基本动力方程式(8-5)可知,拖动力是容器行程Z和加速度a的函数,而Z又是时间t的函数,因此拖动力F是t和α的函数。由此可见,研究和确定滚筒圆周上拖动力的变化规律,必须以提升运动学为基础。
t3一一主减速阶段运行时间,即容器以最大速度 减速到爬行速度叫的时间。
t4一一爬行阶段运行时间,此时重集斗上升到井口以上进入卸载曲轨运行,为减少对井架及曲轨的冲击,爬行速度一般控制在叫 。
t5一一抱闸停车阶段时间,即宾斗到达停车位置,提升机抱闸停车用的时间。
一一休止时间,即装卸载时间。
对于罐笼提升,因元卸载曲轨的限制,故无需初加速阶段,开始就以较大的主加速度加速,但是为了准确停车(使罐笼内的轨道与车场轨道对齐),也需要有一爬行阶段,因此,普通罐笼提升采用如图8-5(a)所示的五阶段速度图。
所以,采用机械制动减速方式时的减速度 为
(8-14)
确定减速方式以后,按上述计算方法确定或计算所需的减速度。但在进行系统动力学分析以前,较难确定合理的减速方式,故先选一个方式确定一个减速度,进行动力学计算,然后再按计算结果验证所选的减速方式是否合适。
确定减速方式时,应首先考虑采用自由滑行减速方式,因这种方式,既达到了减速的目的,又能充分利用提升系统的动能,操作简单,节省电能。若此减速度 值太小,可选较大的减速度,此时制动力不大于0.3Q,可考虑采用机械制动减速。若大于0.3Q,则需采用电气制动方式。
下面以集斗提升六阶段速度图为例介绍速度图参数的计算步骤和方法。
(1)卸载曲轨中初加速时间为
(8-15)
(2)萁斗在卸载曲轨内的行程为 。
主加速时间为
(8-16)
(3)主加速阶段的行程为
(8-17)
(4)主减速阶段时间为
(8-18)
(5)主减速阶段行程为
(8-19)
(由表8-1查出。
(8-31)
等速阶段终了, 拖动力 为
(8-32)
减速阶段开始 , , 拖动力 F3为
(8-33)
减速段终了, ,拖动力 为
(8-34)
爬行段开始, ,拖动力为F4为
(8-35)
爬行阶段终了 , , 拖动力F4为
(8-36)
根据本节计算结果画出力图,数值标入图中。在设计说明书中,速度图和力图是绘制在一起的,如图8-6所示。
对第一水平应该有向=1.2的富裕系数。
最后绘制出提升速度图。
普通罐笼提升为五阶段速度图,其计算方法与上述相同,只是没有初加速阶段。副井提
升速度图,要考虑人员升降时《煤矿安全规程》对速度和加、减速度的限制。在井筒内运送炸药要受《煤矿安全规程》第311条的限制,罐笼的休止时间见表7-2。
第四节提升设备的动力学计算
本节以我国煤矿目前广泛采用的无尾绳静力不平衡提升系统为例,介绍提升设备的运动学计算的基本内容和方法。
一、提升设备的运行规律
提升设备的运行状态,主要取决于提升容器在井筒中的运行规律。而容器的运行规律与容器的类型及控制方法等有密切关系。
提升设备在一个提升循环内的运行规律是用速度图来表示的,表示提升速度随提升时间变化的关系图形,叫做提升速度图。
现以单绳缠绕式无尾绳宾斗提升系统六阶段速度图为例,介绍动力学计算的基本方法。
单绳缠绕式无尾绳提升设备的基本动力方程式为
提升开始时 ,x=0,a=0,, 故拖动力 为
(8-27)
出曲轨, ,拖动力为
(8-28)
主加速阶段开始 , 拖动力 为
(8-29)
主加速阶段终了 , , 拖动力 为
(8-30)
等速阶段开始 , , 拖动力 F2 为
当提升系统的惯性力很大时,在整个减速运行阶段即使不用电动机拖动,系统也将加速运行。因此为了使提升系统减速,必须对系统施加足够的制动力,故称为制动状态减速。当所需制动力很大时,可采用动力制动或低频发电制动等电气制动方式,此时减速度可按需要确定。当所需制动力不大时,采用机械制动减速。当采用机械制动减速时,为了避免闸瓦过度发热和磨损,制动力应不大于0.3Q,即
表8-1 爬行距离及速度选择表
(8)抱闸停车的时间 可定为ls。若行程很小,可考虑包括在爬行距离内不另行计
算。减速度 一般取为1m/ 。
(9)等速阶段的行程为
(10)等速阶段的时间为
(8-22)
(11)一次提升循环时间为
(8-23)
式中 ——休止时间,箕斗休止时间见表7-1。
提升设备的小时提升能力
(8-24)
(一)自由滑行减速方式
在减速开始时,将电动机从电网切除,容器靠系统的惯性向卸载位置运行,速度逐渐降低,既不用电力拖动,又不用制动器制动,故称为自由滑行减速方式。
采用自由滑行减速方式时,电动机已从电网断开,此时拖动力为0,根据基本动力方程式
因减速阶段开始所以减速度
( 8-12)
式中 一一采用自由滑行减速方式时的减速度,m/ 。
h3一一减速阶段的行程,一般为30-40 m。
(二)电动机减速方式
这是用电动机缓慢减速。即将电动机的转子附加电阻再逐级接入转子回路,使电动机
在较软的人工特性上运行。为了能较好地控制电动机,这时出力应不小于35%的额定值,即
所以,当采用电动机减速方式时,其减速度为
(8-13)
\
、
‘
KE
(三)制动状态减速方式
(8-9)
故萁斗提升初加速度α。一般采用0.5m/ 。
(二)主加速度向的确定
主加速度al是按安全经济的原则来确定的,主加速度的大小受《煤矿安全规程》、减速器强度、电动机过负荷能力三个方面的限制。
(1)《煤矿安全规程》对提升加、减速度的限制:立井中用罐笼升降人员时的加减速度不得超过0.75m/s勺斜井中升降人员的加、减速度不得超过0.5m/s2。对升降物料的加、减速度,规程没有规定,一般在竖井,加、减速度最大不超过1.2m/ ,斜井不超过0.7 m/ 。