矩阵求导的一些公式
矩阵的求导
矩阵的求导矩阵的求导是数学中的一个重要概念,它在计算机科学、物理学、经济学等领域都有广泛的应用。
矩阵求导的过程可以用来求解函数的梯度、计算机算法中的参数更新等。
本文将介绍矩阵求导的基本概念和常见方法,以及它们的应用。
我们需要明确什么是矩阵求导。
矩阵求导是指对给定的矩阵函数,计算其对矩阵自变量的导数。
矩阵求导的结果也是一个矩阵,它的每个元素都是函数对自变量的偏导数。
矩阵求导的过程可以通过链式法则和分部积法则等方法进行推导和计算。
在矩阵求导中,最常见的是对矩阵的每个元素进行求导,即所谓的元素级求导。
元素级求导是指对矩阵中的每个元素,分别对自变量求导。
这种求导方法适用于矩阵中每个元素都是独立变量的情况,比如矩阵中的每个元素都是一个标量变量。
在元素级求导中,可以使用求导规则中的加法、减法、乘法、除法等规则来计算每个元素的导数。
除了元素级求导,还有一种常见的矩阵求导方法是矩阵级求导。
矩阵级求导是指对整个矩阵作为一个整体,对自变量求导。
这种求导方法适用于矩阵中的每个元素都是函数的情况,比如矩阵中的每个元素都是一个函数。
在矩阵级求导中,可以使用矩阵的迹、行列式等运算来计算整个矩阵的导数。
在实际应用中,矩阵求导常常用于求解函数的梯度。
函数的梯度是函数在某一点的变化率,它是一个向量,其方向指向函数在该点变化最快的方向,其模表示函数在该点变化的速率。
函数的梯度在优化算法中有着广泛的应用,比如在机器学习中的梯度下降算法中,通过计算损失函数对模型参数的梯度,来更新模型参数以优化模型的性能。
矩阵求导在深度学习中也有着重要的应用。
深度学习中的神经网络通常由多个层组成,每个层都包含大量的参数,通过对参数进行求导,可以计算模型的梯度,并根据梯度进行参数的更新。
矩阵求导在深度学习中可以用来计算损失函数对模型参数的梯度,从而进行反向传播算法,实现模型的训练过程。
除了梯度计算,矩阵求导还可以用于解决约束优化问题。
约束优化问题是指在满足一定约束条件下,求解目标函数的最优解。
多变量微积分和矩阵的求导
向量对向量求导 通过上式可以看出来,向量或者矩阵并不能对比自己简单的运算进行求导,比如向量就不能对矩阵进行求 导。另外, 处在分子位置上的,其实一定是一个函数,即使它是一个矩阵,也是一种多个函数组成的矩阵。 如果是对分子部分求偏导数,偏导数的 Shape 要依赖于 Y 的 Shape; 如果并行求偏导数的部分在分母上, 偏导数的 Shape 则是 X 的转置。例如,xy 都是列向量,dy/dx 是一个列向量,而 dy/dx 则是一个行向量。
多变量微积分
多变量微积分
符号定义
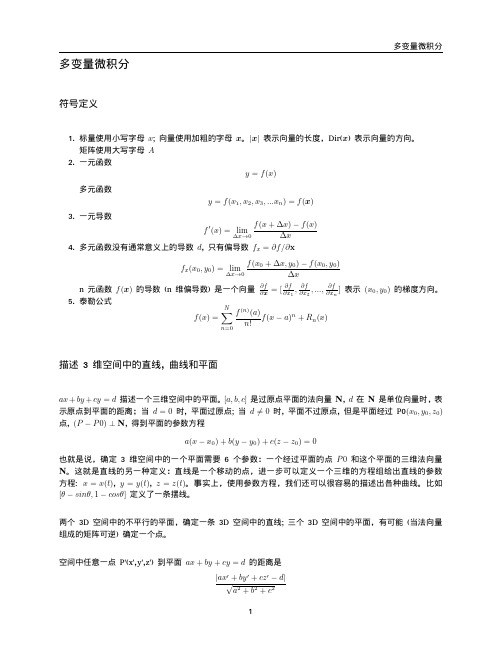
1. 标量使用小写字母 x; 向量使用加粗的字母 x。|x| 表示向量的长度,Dir(x) 表示向量的方向。 矩阵使用大写字母 A 2. 一元函数 y = f (x) 多元函数 y = f (x1 , x2 , x3 , ...xn ) = f (x) 3. 一元导数 f (x + ∆x) − f (x) ∆x 4. 多元函数没有通常意义上的导数 d, 只有偏导数 fx = ∂f /∂ x f ′ (x) = lim
描述 3 维空间中的直线, 曲线和平面
ax + by + cy = d 描述一个三维空间中的平面。 [a, b, c] 是过原点平面的法向量 N, d 在 N 是单位向量时,表 示原点到平面的距离;当 d = 0 时, 平面过原点; 当 d ̸= 0 时, 平面不过原点, 但是平面经过 P0(x0 , y0 , z0 ) 点, (P − P 0) ⊥ N, 得到平面的参数方程 a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0 也就是说,确定 3 维空间中的一个平面需要 6 个参数:一个经过平面的点 P 0 和这个平面的三维法向量 N。这就是直线的另一种定义:直线是一个移动的点,进一步可以定义一个三维的方程组给出直线的参数 方程: x = x(t), y = y (t), z = z (t)。事实上,使用参数方程,我们还可以很容易的描述出各种曲线。比如 [θ − sinθ, 1 − cosθ] 定义了一条摆线。 两个 3D 空间中的不平行的平面,确定一条 3D 空间中的直线; 三个 3D 空间中的平面,有可能 (当法向量 组成的矩阵可逆) 确定一个点。 空间中任意一点 P'(x',y',z') 到平面 ax + by + cy = d 的距离是 |ax′ + by ′ + cz ′ − d| √ a2 + b2 + c2 1
矩阵运算律 偏导数

矩阵运算律偏导数矩阵运算律在微积分中有着重要的应用,特别是在偏导数的计算中。
偏导数是多元函数在某一点上关于某个变量的导数,它在矩阵运算中也有着特殊的性质和规律。
首先,我们来看矩阵的加法和数乘运算。
设A和B是同型矩阵,即具有相同的行数和列数。
那么对于任意实数k,有以下运算律成立:1. A + B = B + A.这是矩阵加法的交换律,即矩阵的加法满足交换律。
2. (A + B) + C = A + (B + C)。
这是矩阵加法的结合律,即矩阵的加法满足结合律。
3. k(A + B) = kA + kB.这是矩阵数乘的分配律,即数与矩阵相乘的运算满足分配律。
接下来,我们来看矩阵的乘法运算。
设A是m×n矩阵,B是n×p矩阵,那么有以下运算律成立:1. A(BC) = (AB)C.这是矩阵乘法的结合律,即矩阵的乘法满足结合律。
2. A(B + C) = AB + AC.这是矩阵乘法对矩阵加法的分配律,即矩阵乘法对矩阵加法满足分配律。
在微积分中,我们经常需要对多元函数进行偏导数的计算。
偏导数的计算也可以利用矩阵运算律来简化和优化。
设函数f(x)是一个n元函数,即f:R^n→R,那么f的偏导数可以表示为一个n维列向量,记作∇f(x)。
对于任意实数k和n元函数f(x),有以下运算律成立:1. ∇(kf) = k∇f.这是偏导数与数乘的运算律,即偏导数与数乘运算满足数乘的运算律。
2. ∇(f + g) = ∇f + ∇g.这是偏导数与函数加法的运算律,即偏导数与函数加法满足加法的运算律。
通过矩阵运算律和偏导数的运算律,我们可以更加方便地进行多元函数的偏导数计算,简化运算步骤,提高计算效率。
这些运算律的理解和应用对于理解微积分和矩阵运算有着重要的意义,也为实际问题的求解提供了有力的数学工具。
2×2矩阵求导法则
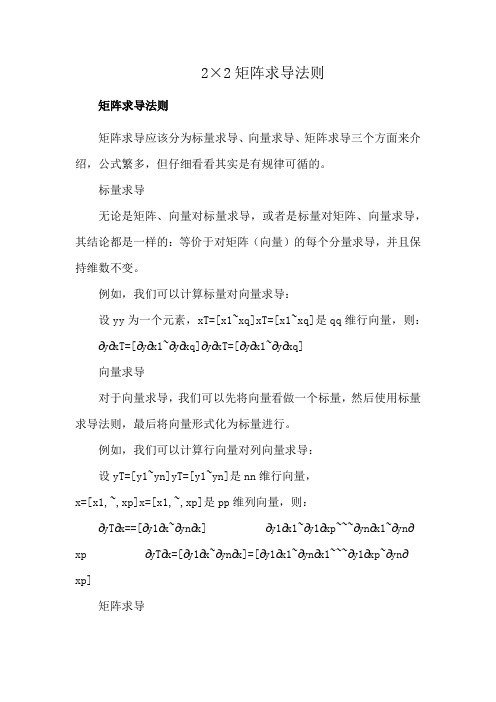
2×2矩阵求导法则矩阵求导法则矩阵求导应该分为标量求导、向量求导、矩阵求导三个方面来介绍,公式繁多,但仔细看看其实是有规律可循的。
标量求导无论是矩阵、向量对标量求导,或者是标量对矩阵、向量求导,其结论都是一样的:等价于对矩阵(向量)的每个分量求导,并且保持维数不变。
例如,我们可以计算标量对向量求导:设yy为一个元素,xT=[x1~xq]xT=[x1~xq]是qq维行向量,则:∂y∂xT=[∂y∂x1~∂y∂xq]∂y∂xT=[∂y∂x1~∂y∂xq]向量求导对于向量求导,我们可以先将向量看做一个标量,然后使用标量求导法则,最后将向量形式化为标量进行。
例如,我们可以计算行向量对列向量求导:设yT=[y1~yn]yT=[y1~yn]是nn维行向量,x=[x1,~,xp]x=[x1,~,xp]是pp维列向量,则:∂yT∂x==[∂y1∂x~∂yn∂x]⎡⎡⎡⎡⎡∂y1∂x1~∂y1∂xp~~~∂yn∂x1~∂yn∂xp⎡⎡⎡⎡⎡∂yT∂x=[∂y1∂x~∂yn∂x]=[∂y1∂x1~∂yn∂x1~~~∂y1∂xp~∂yn∂xp]矩阵求导与向量求导类似,先将矩阵化当做一个标量,再使用标量对矩阵的运算进行。
例如,我们可以计算矩阵对列向量求导:设Y=⎡⎡⎡y11~ym1~~~y1n~ymn⎡⎡⎡Y=[y11~y1n~~~ym1~ymn]是m×nm×n矩阵,x=[x1,~,xp]x=[x1,~,xp]是pp维列向量,则:∂Y∂x=[∂Y∂x1,~,∂Y∂xp]∂Y∂x=[∂Y∂x1,~,∂Y∂xp]矩阵微积分常见求导性质实值函数相对于实向量的梯度设f(x)=x=[x1,~,xn]Tf(x)=x=[x1,~,xn]T∂f(x)∂xT=∂x∂xT=In×n∂f(x)∂xT=∂x∂xT=In×n∂(f(x))T∂x=∂xT∂x=In×n∂(f(x))T∂x=∂xT∂x=In×n∂f(x)∂x=∂x∂x=vec(In×n)∂f(x)∂x=∂x∂x=vec(In×n)∂(f(x))T∂xT=∂xT∂xT=vec(In×n)T∂(f(x))T∂xT=∂xT∂xT=vec(In×n)T其中,vecvec表示向量化矩阵,按列将矩阵表示为向量,具体可见Wikipedia。
矩阵求导公式
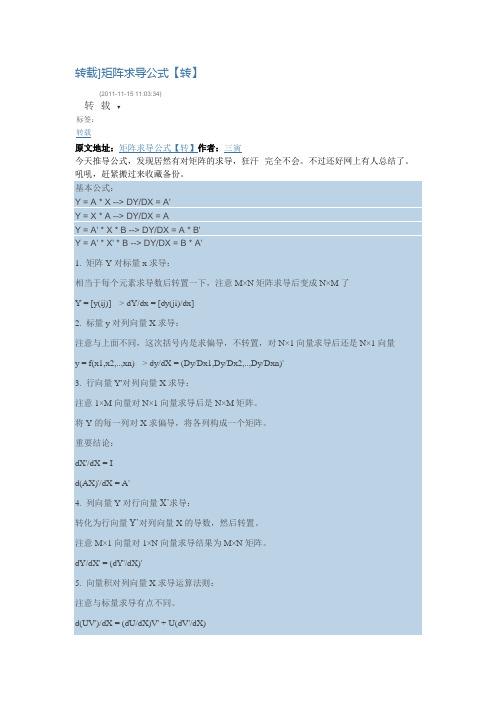
转载]矩阵求导公式【转】(2011-11-15 11:03:34)转载▼标签:转载原文地址:矩阵求导公式【转】作者:三寅今天推导公式,发现居然有对矩阵的求导,狂汗--完全不会。
不过还好网上有人总结了。
吼吼,赶紧搬过来收藏备份。
基本公式:Y = A * X --> DY/DX = A'Y = X * A --> DY/DX = AY = A' * X * B --> DY/DX = A * B'Y = A' * X' * B --> DY/DX = B * A'1. 矩阵Y对标量x求导:相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了Y = [y(ij)] --> dY/dx = [dy(ji)/dx]2. 标量y对列向量X求导:注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'3. 行向量Y'对列向量X求导:注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:dX'/dX = Id(AX)'/dX = A'4. 列向量Y对行向量X’求导:转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'5. 向量积对列向量X求导运算法则:注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'重要结论:d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = Ad(AX)/dX' = (d(X'A')/dX)' = (A')' = Ad(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X6. 矩阵Y对列向量X求导:将Y对X的每一个分量求偏导,构成一个超向量。
方向余弦矩阵求导

方向余弦矩阵求导一、引言方向余弦矩阵是描述一个坐标系相对于另一个坐标系的旋转关系的重要工具。
在机器人学、导航等领域中,方向余弦矩阵被广泛应用。
本文将介绍方向余弦矩阵的求导方法。
二、方向余弦矩阵1. 定义方向余弦矩阵是描述两个坐标系之间旋转关系的矩阵,通常记作C,其元素为cosine值。
例如,Cij表示第i个轴在第j个轴上的cosine 值。
2. 性质方向余弦矩阵具有以下性质:(1)正交性:C*C^T=I,其中I为单位矩阵。
(2)行列式为1:det(C)=1。
(3)逆矩阵等于转置:C^-1=C^T。
3. 求解方法求解方向余弦矩阵的方法有多种,其中最常用的是欧拉角法和四元数法。
这里不再赘述。
三、方向余弦矩阵求导1. 求导公式在机器人学和导航等领域中,需要对方向余弦矩阵进行求导。
下面给出求解dC/dt的公式:dC/dt=[ω]×C其中,[ω]表示角速度向量的斜对称矩阵,即[ω]=| 0 -ωz ωy || ωz 0 -ωx ||-ωy ωx 0 |2. 推导过程推导过程如下:设旋转矩阵为R(t),则其微小变化可以表示为:dR=R(t+dt)-R(t)由于R是正交矩阵,因此有:dR^T=-dR即(R+dR)^T=R^T-dR^T两边同时左乘R,得到:RR^T=(R+dR)(R+dR)^T=R(R^T-dR^T)(R+dR)^T=RR^T-dRR^T-dRR^T+d(dRR^T)因为dRR^T是一个二阶小量,可以忽略。
因此有:dRR^T=-d(dRR^T)我们要求的是旋转矩阵的微分dC/dt。
由于C=RR^-1,因此有:dC=d(RR^-1)/dt=d(R^-1)/dt R+ R d(R^-1)/dt根据导数的定义和上面推导出来的式子,可以得到:d(R^-1)/dt=-[ω]×(R^-1)将上面两个式子带入到原式中,得到:dC/dt=[ω]×(CR)由于C是正交矩阵,因此有:dC/dt=[ω]×C四、总结本文介绍了方向余弦矩阵的定义、性质和求解方法,并给出了方向余弦矩阵求导的公式和推导过程。
矩阵内积求导法则
矩阵内积求导法则是矩阵微分中的一组规则,用于计算涉及矩阵的函数的导数。
这些法则在机器学习、优化问题等领域中经常被使用,因为涉及到大量矩阵运算。
以下是一些常见的矩阵内积求导法则的讨论,为了简便,我们使用大写字母表示矩阵,小写字母表示标量。
这些矩阵内积求导法则为处理涉及矩阵的复杂函数提供了便利,尤其在深度学习和优化问题中,这些法则被广泛应用于梯度下降、反向传播等算法中,以优化模型参数。
深入理解这些法则对于矩阵微分的应用和理论研究都具有重要的意义。
旋转矩阵的导数公式(一)
旋转矩阵的导数公式(一)旋转矩阵的导数公式1. 旋转矩阵的定义旋转矩阵是一种表示二维或三维旋转变换的矩阵。
在二维情况下,旋转矩阵是一个2x2矩阵,而在三维情况下,旋转矩阵是一个3x3矩阵。
一般来说,旋转矩阵可以通过角度来定义,例如在二维情况下:R(theta) = [cos(theta) -sin(theta)][sin(theta) cos(theta)]其中theta表示旋转角度。
2. 旋转矩阵的导数公式在矩阵求导的过程中,旋转矩阵的导数公式是非常有用的。
根据这些公式,我们可以更方便地计算旋转矩阵的导数。
二维情况下的旋转矩阵导数公式二维情况下,旋转矩阵的导数公式如下:dR(theta)/dtheta = [-sin(theta) -cos(theta)][ cos(theta) -sin(theta)]这个公式表示,在二维旋转中,旋转矩阵关于旋转角度的导数等于一个特殊的矩阵。
三维情况下的旋转矩阵导数公式三维情况下,旋转矩阵的导数公式具有一定的复杂性,但也可以通过一个简洁的形式给出。
假设旋转矩阵为R,对应的旋转向量为omega,则旋转矩阵的导数公式如下:dR/dtheta = J(omega)其中J(omega)表示一个特殊的3x3矩阵,被称为旋转矩阵的“雅可比矩阵”。
3. 公式应用举例二维旋转矩阵导数公式应用假设我们有一个二维的旋转变换,其旋转角度为theta = pi/4,则根据二维情况下的旋转矩阵导数公式,可以得到:dR(theta)/dtheta = [-sin(theta) -cos(theta)][ cos(theta) -sin(theta)]dR(pi/4)/dtheta = [-sin(pi/4) -cos(pi/4)][ cos(pi/4) -sin(pi/4)]= [-1/sqrt(2) -1/sqrt(2)][ 1/sqrt(2) -1/sqrt(2)]这样,我们就得到了旋转角度为pi/4时,二维旋转矩阵关于旋转角度的导数。
矩阵内积求导法则
矩阵内积求导法则全文共四篇示例,供读者参考第一篇示例:矩阵内积求导法则是矩阵微积分中非常重要的一个内容,它在机器学习、优化问题、计算机图形学等领域都有着广泛的应用。
本篇文章将详细介绍矩阵内积求导法则的定义、推导过程以及实际应用。
一、定义矩阵内积指的是两个矩阵相乘得到的结果。
设有两个矩阵A和B,它们的内积记为C,记作C=A*B。
在矩阵内积中,两个矩阵的行数和列数要满足一定的要求,具体而言,如果矩阵A的维度为m×n,矩阵B的维度为n×p,那么它们的内积矩阵C的维度为m×p。
二、矩阵内积的求导法则在矩阵微积分中,我们经常需要对矩阵内积进行求导。
矩阵内积的求导法则可以表示为:若有两个矩阵A和B,它们的内积C=A*B,则C对任意一个矩阵的导数可以表示为:∂C/∂A = B^TB^T表示B的转置矩阵。
同理,C对B的导数可以表示为:这个法则的推导过程可以通过矩阵的展开式进行证明,这里不再详述。
这个法则对于矩阵微积分来说是非常重要的,它可以帮助我们快速求解复杂的矩阵导数。
三、实际应用矩阵内积的求导法则在机器学习和优化算法中有着广泛的应用。
在机器学习中,我们经常需要通过梯度下降等方法来最小化损失函数,这就会涉及到对损失函数关于模型参数(矩阵)的导数计算。
利用矩阵内积的求导法则,我们可以快速有效地计算出损失函数对参数的导数,从而完成参数的更新。
在计算机图形学中,矩阵内积求导法则也有着重要的应用。
在图形变换和动画建模等领域,我们经常需要对矩阵进行变换和运动操作,这就需要对矩阵的导数进行计算。
通过矩阵内积的求导法则,我们可以准确地获得矩阵变换的导数,从而实现图形的平移、旋转和缩放等操作。
第二篇示例:矩阵内积是矩阵乘法的一种形式,通常用于描述多个向量之间的关系。
在机器学习和深度学习领域,矩阵内积求导是一项重要的计算任务,它能够帮助我们优化模型并提高模型的性能。
矩阵内积求导法则是求解矩阵内积的导数的规则和方法,其基本原理是通过链式法则和向量微积分等基本数学知识来推导出矩阵内积的导数表达式。
矩阵求导的神经网络算法
矩阵求导的神经网络算法在神经网络中,矩阵求导是非常重要的算法之一。
它能够帮助我们求得代价函数在所有参数上的梯度,从而在训练神经网络时进行反向传播优化。
本文将从矩阵求导的定义、优化问题以及实现细节三个方面介绍矩阵求导在神经网络中的应用。
1. 矩阵求导的定义矩阵求导是矩阵微积分中的一种重要运算。
我们知道,在单变量微积分中,求解函数的导数(即斜率)是一个非常重要的概念,而在多变量微积分中,导数则需要被扩展为矩阵形式。
具体而言,对于一个向量函数$f(\boldsymbol x)=[f_1(\boldsymbolx),f_2(\boldsymbol x),...,f_n(\boldsymbol x)]^T$,其中$\boldsymbolx=[x_1,x_2,...,x_m]^T$,我们可以定义该函数对向量$\boldsymbolx$的偏导数矩阵为:$$J_{\boldsymbol{x}}(f(\boldsymbol{x}))=\begin{bmatrix}\frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & ... & \frac{\partial f_1}{\partial x_m} \\ \frac{\partial f_2}{\partial x_1}& \frac{\partial f_2}{\partial x_2} & ... & \frac{\partial f_2}{\partialx_m} \\ ... & ... & ... & ... \\ \frac{\partial f_n}{\partial x_1} &\frac{\partial f_n}{\partial x_2} & ... & \frac{\partial f_n}{\partial x_m} \end{bmatrix}$$其中,每个元素$\frac{\partial f_i}{\partial x_j}$表示函数$f_i$在$x_j$处的偏导数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
在网上看到有人贴了如下求导公式:
Y = A * X --> DY/DX = A'
Y = X * A --> DY/DX = A
Y = A' * X * B --> DY/DX = A * B'
Y = A' * X' * B --> DY/DX = B * A'
于是把以前学过的矩阵求导部分整理一下:
1. 矩阵Y对标量x求导:
相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了
Y = [y(ij)] --> dY/dx = [dy(ji)/dx]
2. 标量y对列向量X求导:
注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量
y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'
3. 行向量Y'对列向量X求导:
注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:
dX'/dX = I
d(AX)'/dX = A'
4. 列向量Y对行向量X’求导:
转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'
5. 向量积对列向量X求导运算法则:
注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)
d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'
重要结论:
d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = A
.
d(AX)/dX' = (d(X'A')/dX)' = (A')' = A
d(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X
6. 矩阵Y对列向量X求导:
将Y对X的每一个分量求偏导,构成一个超向量。
注意该向量的每一个元素都是一个矩阵。
7. 矩阵积对列向量求导法则:
d(uV)/dX = (du/dX)V + u(dV/dX)
d(UV)/dX = (dU/dX)V + U(dV/dX)
重要结论:
d(X'A)/dX = (dX'/dX)A + X'(dA/dX) = IA + X'0 = A
8. 标量y对矩阵X的导数:
类似标量y对列向量X的导数,
把y对每个X的元素求偏导,不用转置。
dy/dX = [ Dy/Dx(ij) ]
重要结论:
y = U'XV = ΣΣu(i)x(ij)v(j) 于是dy/dX = = UV'
y = U'X'XU 则dy/dX = 2XUU'
y = (XU-V)'(XU-V) 则dy/dX = d(U'X'XU - 2V'XU + V'V)/dX = 2XUU' - 2VU' + 0 =
2(XU-V)U'
9. 矩阵Y对矩阵X的导数:
将Y的每个元素对X求导,然后排在一起形成超级矩阵。
无关善良
天不太好,冷冷的风,凉凉的夜,凄凄的雨,陌陌的路,寂寞的路灯,清冷的街道,还
有那个独行的人、、、、、、
回忆总是很厚重,一个广告画面,一句歌词,一个表情,总能让人陷入深深的回忆,放
不下的,不仅仅有甜的,还有苦的。
越长大,眷恋越多,开始学着去放弃,放弃曾经坚守的
美好,放弃你不舍得放弃的东西,开始评价他人,自己都觉得话语刻薄,开始无视情感,别
人都看你不忍心,越来越觉得,别人越来越善良,而自己,离这个癖好越来越远。
所以,越
长大,越孤单、、、、、、。