矩阵向量求导法则
matrixid矩阵向量求导法则

(1b)
(AB)T = BT AT
(1c)
if individual inverses exist (AB)−1 = B−1A−1
(1d)
(A−1)T = (AT )−1
(1e)
0.2 trace, determinant and rank
|AB| = |A||B|
(2a)
|A−1| = 1
(2b)
0 A22
= |A11||A22|
A11 0
0 A22
−1
=
A−111 0
0 A−221
(9d) (9e)
0.10 matrix inversion lemma (sherman-morrison-woodbury)
using the above results for block matrices we can make some substitutions and get the following important results:
∂X
∂X
∂Tr XT AX = (A + AT )X
(3d)
∂X
∂Tr X−1A = −X−1AT X−1
(3e)
∂X
0.4 derivatives of determinants
∂|AXB| = |AXB|(X−1)T = |AXB|(XT )−1
(4a)
∂X
∂ ln |X| = (X−1)T = (XT )−1
(4b)
∂X
∂ ln |X(z)| = Tr
X−1 ∂X
(4c)
∂z
∂z
∂|XT AX| = |XT AX|(AX(XT AX)−1 + AT X(XT AT X)−1) (4d) ∂X
向量乘矩阵求导

向量乘矩阵求导全文共四篇示例,供读者参考第一篇示例:向量乘矩阵求导是矩阵微积分中的重要知识点,它在许多领域都有着广泛的应用。
在此篇文章中,我们将探讨向量乘矩阵求导的基本原理和具体计算方法,帮助读者更好地理解这一概念。
一、向量与矩阵的乘法在矩阵乘法中,两个矩阵相乘的定义是,如果矩阵A是一个m×n 的矩阵,矩阵B是一个n×p的矩阵,那么矩阵A乘以矩阵B得到的结果是一个m×p的矩阵。
具体来说,矩阵乘法的计算方法是将矩阵A的每一行与矩阵B的每一列进行点乘,然后将结果相加得到新矩阵的每个元素。
而向量乘矩阵的计算方法也是类似的,只是向量可以看作是一个特殊的矩阵,即只有一行或一列的矩阵。
向量与矩阵相乘的结果是一个新的向量,其维度与原始矩阵中的列数一致。
对于向量乘矩阵的求导,需要使用链式法则来进行计算。
具体来说,如果有一个向量y是由一个矩阵X乘以一个向量x得到的,即y = X*x,那么它的导数可以表示为dy/dx = d(X*x)/dx。
根据矩阵乘法的性质,可以将y展开为y = [y1, y2, ..., yn],其中每个yi都是由X的一行与x进行点乘得到的。
可以将dy/dx表示为一个行向量,其每个元素就是对应的yi关于x的导数。
在实际应用中,向量乘矩阵求导的计算通常可以通过以下步骤进行:1. 定义原始向量y = X*x,其中X是一个m×n的矩阵,x是一个n×1的向量,y是一个m×1的向量。
2. 将y展开为y = [y1, y2, ..., yn],其中每个yi都是由X的一行与x进行点乘得到的。
3. 分别求解每个yi关于x的导数,然后将其组合成一个行向量,即dy/dx。
4. 最后得到的dy/dx即是向量y关于向量x的导数。
示例:假设有一个2×3的矩阵X = [[1,2,3],[4,5,6]],一个3×1的向量x = [[1],[2],[3]],现在要求向量y = X*x的导数。
矩阵向量求导法则
矩阵向量求导法则
矩阵向量求导法则是一组规则,用于计算矩阵和向量之间的导数。
以下列出了常见的矩阵向量求导法则:
1. 标量对向量求导:
\frac{d}{dx}(c^{T}x) = c
其中,c是一个常数向量,x是一个列向量。
2. 向量对标量求导:
\frac{d}{dx}(x^{T}c) = c^{T}
其中,c是一个常数向量,x是一个列向量。
3. 向量对向量求导:
\frac{d}{dx}(x^{T}Ax) = (A+A^{T})x
其中,A是一个矩阵,x是一个列向量。
4. 向量对矩阵求导:
\frac{d}{dA}(x^{T}Ax) =
(x^{T}+x)(\frac{dA}{dA}+\frac{dA^{T}}{dA}) = 2x^{T}A
其中,A是一个矩阵,x是一个列向量。
5. 标量对矩阵求导:
\frac{d}{dA}(c^{T}Ax) = c^{T}x^{T}
其中,c是一个常数向量,A是一个矩阵,x是一个列向量。
6. 向量对向量求导(链式法则):
\frac{d}{dx}(f(g(x))) = (\frac{df}{dy})^{T}\frac{dg}{dx}
其中,f(\cdot)和g(\cdot)是两个函数,y=g(x),\frac{df}{dy}是
f(\cdot)对y的导数。
矩阵求导(本质、原理与推导)详解

矩阵求导(本质、原理与推导)详解1.引言矩阵求导是数学分析中重要的一部分,广泛应用于机器学习、数据挖掘和优化问题中。
本文将介绍矩阵求导的本质、原理以及推导过程,为读者提供一个比较全面的了解。
2.矩阵的本质及相关概念在矩阵求导前,我们需要先了解矩阵的本质及相关概念。
矩阵是一个按照规律排列的方阵,其中每个元素通常是实数或者复数。
以$n$行$m$列的矩阵$A$为例,可以表示为:$$A=\begin{bmatrix}a_{1,1}&a_{1,2}&\cdots&a_{1,m}\\a_{2,1}&a_{2,2}&\cdots&a_{2,m}\\\vdots&\vdots&\ddots&\vdots\\a_{n,1}&a_{n,2}&\cdots&a_{n,m}\\\end{bmatrix}$$其中$a_{i,j}$表示矩阵$A$中第$i$行第$j$列的元素。
矩阵还有一些相关的概念,如矩阵的转置、逆矩阵、伴随矩阵等等,这里不一一赘述。
3.标量函数对向量、矩阵的导数在开始矩阵求导之前,我们需要先了解标量函数对向量或矩阵的导数。
设矩阵$A$是一个$m\times n$的矩阵,$x$是一个$n \times1$的向量,函数$f(x)$将$x$映射为一个标量。
我们定义$f(x)$对$x$的导数为:$$\frac{\partial f(x)}{\partial x}=\begin{bmatrix}\frac{\partial f(x)}{\partial x_1}&\frac{\partial f(x)}{\partial x_2}&\cdots&\frac{\partial f(x)}{\partial x_n}\end{bmatrix}$$其中每一项$\frac{\partial f(x)}{\partial x_i}$表示$f(x)$对$x_i$的偏导数。
矩阵求导法则的解析与应用
矩阵求导法则的解析与应用矩阵求导法则是矩阵微积分中的基本概念,它在众多领域中都有广泛的应用,尤其是在优化算法、机器学习和信号处理等领域中。
本文将深入探讨矩阵求导法则的解析和应用,并分享对这一主题的观点和理解。
一、矩阵求导法则的基本概念1. 矩阵求导的定义和目的在矩阵微积分中,矩阵求导是指对矩阵中的每个元素进行求导运算。
其目的是为了描述矩阵变量函数在某一点的变化率,从而可以进一步分析函数在该点的性质和优化问题的解。
2. 矩阵对标量的导数当矩阵中的元素都是标量时,矩阵对标量的导数就是普通的微积分中的导数。
它遵循标量的求导法则,如常数因子法则、求和法则和链式法则等。
3. 矩阵对向量的导数当矩阵中的元素是向量时,矩阵对向量的导数运算更为复杂。
需要使用矩阵求导法则来进行推导和计算。
常见的矩阵求导法则包括向量对向量的导数、向量对标量的导数、标量对向量的导数等。
二、矩阵求导法则的应用1. 优化算法中的应用在优化算法中,矩阵求导法则被广泛应用于求解最优化问题。
梯度下降算法通过计算函数的梯度(即矩阵对向量的导数)来寻找函数的最小值。
矩阵求导法则为梯度下降算法提供了有效的计算方式,提高了算法的收敛速度和性能。
2. 机器学习中的应用在机器学习中,矩阵求导法则用于对损失函数进行求导,以便于参数的优化和模型的训练。
反向传播算法中就需要对损失函数对参数矩阵的导数进行计算和更新。
矩阵求导法则的正确应用可以简化计算过程,提高训练效率和模型的准确性。
3. 信号处理中的应用在信号处理领域,矩阵求导法则被广泛应用于信号的滤波和特征提取等任务中。
基于最小均方误差准则的线性滤波器设计中,需要对损失函数对滤波器系数矩阵的导数进行计算。
矩阵求导法则为滤波器设计提供了理论基础和数值计算方法。
三、个人观点和理解作为一名文章写手,在撰写这篇文章的过程中,我对矩阵求导法则的重要性有了更深入的认识和理解。
矩阵求导法则不仅对于理解优化算法、机器学习和信号处理等领域的核心概念至关重要,而且在实际应用中也发挥着重要的作用。
矩阵对向量求导
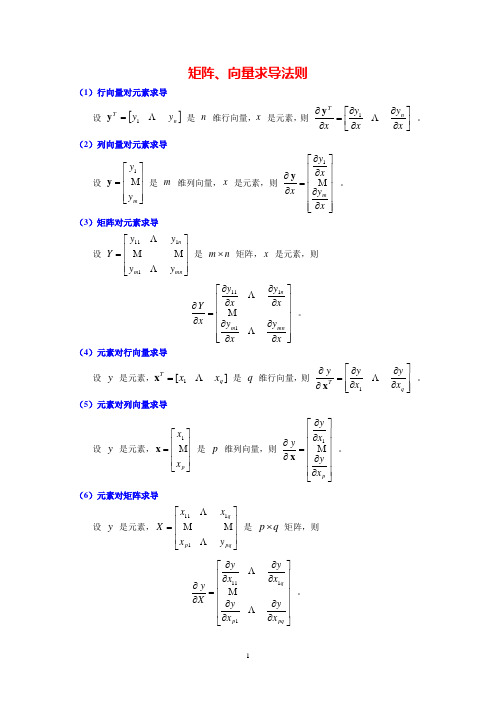
矩阵、向量求导法则(1)行向量对元素求导设 []n Ty y 1=y 是 n 维行向量,x 是元素,则⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂x y xy x n T1y 。
(2)列向量对元素求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m y y 1y 是 m 维列向量,x 是元素,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂=∂∂x y x y x m 1y 。
(3)矩阵对元素求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=mn m n y y y y Y1111 是 n m ⨯ 矩阵,x 是元素,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂x y xyx y xy x Y mn m n1111。
(4)元素对行向量求导 设 y 是元素,][1q Tx x =x 是 q 维行向量,则⎥⎥⎦⎤⎢⎢⎣⎡∂∂∂∂=∂∂q T x y x yy 1x 。
(5)元素对列向量求导设 y 是元素,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=p x x 1x 是 p 维列向量,则 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂=∂∂p x y x y y 1x。
(6)元素对矩阵求导设 y 是元素,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=pq p q y x x x X 1111 是 q p ⨯ 矩阵,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂pq p q x y x yx y x yX y1111。
(7)行向量对列向量求导设 []n Ty y 1=y 是 n 维行向量,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=p x x 1x 是 p 维列向量,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂p n pn Tx y x yx y x y1111x y。
(8)列向量对行向量求导设 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m y y 1y 是 m 维列向量,][1q Tx x =x 是 q 维行向量,则⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=∂∂q m mq Tx y x y x y x y1111x y 。
(9)行向量对行向量求导设 []n Ty y 1=y 是 n 维行向量,][1q T x x =x 是 q 维行向量,则⎥⎥⎦⎤⎢⎢⎣⎡∂∂∂∂=∂∂qTTTT x x y y x y1 。
向量求导法则
向量求导法则向量求导法则是微积分学中最基础、最重要的定理之一,是翻开微积分本质的第一步。
它由哥本哈根大学工程学和数学家路德维希科普兹(LudwigKoopmans)于1930年发现。
它的核心思想是“从数量的角度分析可以帮助我们更好地理解曲线与空间变化的关系”。
向量求导法则被称为“向量微积分的灵魂”,其定义如下:假设给定任意非零向量Y与任意函数F(x),则当向量Y在定义域中的每一点x处取到最小值时,F(x) . Y = 0,其中F(x)是函数F(x)在点x处的梯度向量。
向量求导法则有以下几个重要特性:(1)向量求导法则有助于我们理解函数空间变化的关系,能够从宏观上描述函数的变化,从而把握函数的变化趋势;(2)向量求导法则有助于我们了解函数在特定点处的“最小值”,这能够指引我们快速找到函数在某一点处取最大值或最小值;(3)向量求导法则也有助于我们更好地理解矩阵和内积的规律及其关系。
向量求导法则的实际应用非常广泛,主要表现在如下几个方面:(1)最小值求解:利用向量求导法则可以快速找到函数在特定点处的最小值,用于数值优化、求解最优化问题;(2)矩阵计算:向量求导法则在矩阵计算中也有重要的应用,它可以帮助我们更快更准确地计算出矩阵的内积和外积;(3)经济分析:向量求导法则也被广泛应用于经济分析手段,利用它可以更好地分析经济体的发展趋势及其影响,从而为政府制定更适合的政策和决策提供参考。
通过以上内容可以知道,向量求导法则定义简单,但是意义十分重要,它的应用也非常广泛,无论是函数求解,矩阵计算,还是经济分析,都能得到重要的帮助。
由此,我们可以看到,它在数学中起到了重要的作用,真正实现了将这一理论转化为实际应用的目的,也使得我们能够更有效、更快速地解决数学和经济等方面的问题。
总之,向量求导法则是一个重要的理论,它不仅用于数学和经济学方面,也在其他众多领域都有重要的应用。
以向量求导法则为基础,我们可以对函数的形态、变化趋势及其关系有一个全局的认识,从而使我们能够更好地理解函数、更好地分析经济等问题,推动经济发展和科学进步,从而为人类的福祉做出更大的贡献。
矩阵求导matrix+vector+derivatives+for+machine+learning
。用劈形算子表示时可记作
n
。
∈ R
注:如前所述,本教程仅仅是把变量都看成多个实数,无所谓行与列之分,因此在表述从向量 x
到f
∈ R
m
的雅
克比矩阵时,不区分 x 或者 f 到底是行向量还是列向量,统一用 ∇x f 表示,维度也都是 m-by-n。有些教程可能会区分 行对列、列对列、行对行、列对行几种不同情形的求导,认为有些结果相差一个转置,有些组合不能求导等等。本教程则 认为只有一种求导结果,就是雅克比矩阵。 有一点需要注意的是,若 f 退化成标量 f ,则 x 到 f 的雅克比矩阵
∇x F : R → R
′ m×n
,则∂ F /∂ x也是一个m × n维矩阵,且(∂ F /∂ x)ij
= ∂ f ij /∂ x
ห้องสมุดไป่ตู้
,也可用劈形算子将导数记作
m
,或记作 F x 。
: R → R
T
由于向量是矩阵的特殊情形,根据上面的定义也可以得到自变量为向量时的定义:若函数f 一个m维向量,且(∂ f /∂ x)i
∇ f
2
: R
m
→ R ∂
2
,其梯度记为 ∇f
∂f = ∂x
,也可记作gradf ,是一个 m 维向量。Hessian矩阵记为
f = ∂ f i /∂ x
,则∂ f /∂ x也是
T
。若函数值 f
T
是行向量则结果为行向量,可记作 ∇x f
或 ∂f
/∂ x
;若函数值
是列向量则求导结果为列向量,可记作 ∇x f 或 ∂ f /∂ x。
注:本文开头即说明过,变量为向量时仅仅是将其看作多个实数,无所谓行向量与列向量之分。这里用行向量或列向量的 说法仅仅为了把公式用矩阵相乘的方式表示出来方便,因为在数学公式总要指定向量是行向量或者列向量中的某一个,才 能与公式里的其他部分做矩阵运算时维度相容。下同。 实值函数对矩阵/向量的导数: 要点:求导结果与自变量同型,且每个元素就是f 对自变量的相应分量求导 若函数f
[全]矩阵求导matrix calculus
矩阵求导matrix calculus
这是机器学习中常用的矩阵求导类型,向量对标量,向量对向量,矩阵对标量的求导还是容易记忆的,在分子布局的情况下,和常见的函数求导公式是类似,如下面三张图所示。
分母布局一般是分子布局的转置(但不全是)
我这里主要想讲一下标量对标量/向量/矩阵的求导。
矩阵求导是不满足链式法则的,但微分的定义仍然是有用的,我们利用微分和求导的关系,可以构建下面的关系式(注:下面全是针对分子布局来说的)
看不懂?没关系,我们举个例子,对下面的表达式求导,a,b,C都与X无关,C,X表示矩阵,a,b表示向量。
注意到这里的分子部分f是个标量
标量的迹就是它本身,微分号可以提出来:
这里列举了一些迹的相关性质,最后一条比较重要需要用到:
f太复杂了,我们要化简,利用矩阵微分的相关性质
我们利用矩阵微分的乘法性质将其分为了两部分:
接下来应该干什么呢?回到我们的关系式
我们的目标就很明确了,就是要将微分部分dX移到最后一位,这样前面的系数就是我们要求的导数了!
令Y=Xa+b,我们还要将dY表示成dX,同样利用乘法性质
这样上式表示为:
这样导数就是其系数
和wiki matrix calculus上分子布局求导结果是一致的,分母布局就是转置一下
总的来说只要分子是个标量,那么操作是类似的,无论分母是向量还是矩阵。
向量矩阵求导
矩阵Y对标量x求导:相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M 了Y = [y(ij)] --> dY/dx = [dy(ji)/dx]2. 标量y对列向量X求导:注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'3. 行向量Y'对列向量X求导:注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:dX'/dX = Id(AX)'/dX = A'4. 列向量Y对行向量X’求导:转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'5. 向量积对列向量X求导运算法则:注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'重要结论:d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = A d(AX)/dX' = (d(X'A')/dX)' = (A')' = Ad(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X6. 矩阵Y对列向量X求导:将Y对X的每一个分量求偏导,构成一个超向量。
注意该向量的每一个元素都是一个矩阵。