nRF51822外部中断学习总结
nrf51822学习笔记之TIMER
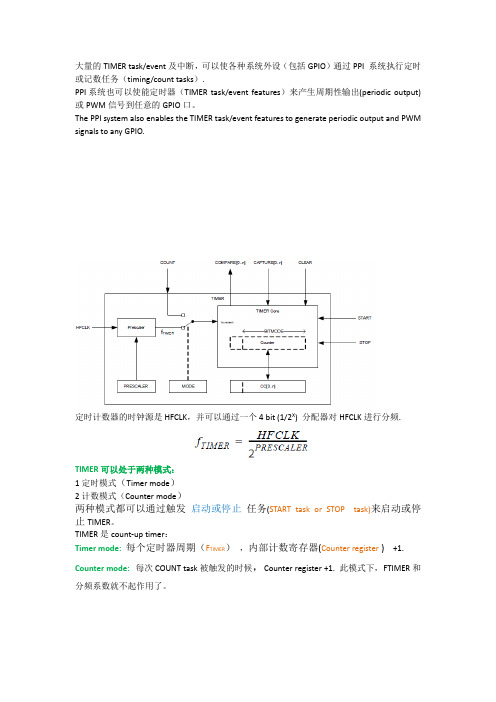
大量的TIMER task/event及中断,可以使各种系统外设(包括GPIO)通过PPI 系统执行定时或记数任务(timing/count tasks).PPI系统也可以使能定时器(TIMER task/event features)来产生周期性输出(periodic output)或PWM信号到任意的GPIO口。
The PPI system also enables the TIMER task/event features to generate periodic output and PWM signals to any GPIO.定时计数器的时钟源是HFCLK,并可以通过一个4 bit (1/2X) 分配器对HFCLK进行分频.TIMER可以处于两种模式:1定时模式(Timer mode)2计数模式(Counter mode)两种模式都可以通过触发启动或停止任务(START task or STOP task)来启动或停止TIMER。
TIMER是count-up timer:Timer mode:每个定时器周期(F TIMER),内部计数寄存器(Counter register )+1. Counter mode:每次COUNT task被触发的时候,Counter register +1. 此模式下,FTIMER和分频系数就不起作用了。
TIMER可以通过位宽寄存器(BITMODE register)设置计数最大值(maximum value).分频和位宽寄存器(PRESCALER register and the BITMODE register)只能在TIMER停止运行的时候对其进行修改,否则结果难以预料。
当计数超过了最大值时,计数寄存器会溢出,并自动从0重新开始计数。
可通过执行CLEAR task 使TIMER清0。
比较和捕获(Compare/Capture):比较:每个捕获比较寄存器(CC[0..3])都可以产生一个COMPARE event.当某个计数值计到与capture compare register CC[n]中的值相等时,就会产生一个COMPARE[n] event,这两个n 是对应着的。
外部中断计数实验报告

一、实验目的1. 理解单片机外部中断的工作原理和触发条件。
2. 掌握如何通过外部中断实现计数功能。
3. 学习中断服务程序的设计方法。
4. 提高单片机编程和调试能力。
二、实验环境1. 单片机:80C512. 开发工具:Keil uVision3. 实验电路:按键、LED灯、单片机及其相关外围电路三、实验原理外部中断是指单片机通过外部引脚接收到的中断信号,使得CPU暂停当前程序,转而执行中断服务程序。
本实验通过外部中断实现计数功能,具体原理如下:1. 将单片机的某个外部引脚(如P3.2)设置为外部中断0(INT0)的触发引脚。
2. 在外部中断0的中断服务程序中,设置一个计数变量,每次中断发生时,计数变量加1。
3. 将计数变量的值通过LED灯显示出来,以观察计数过程。
四、实验步骤1. 创建Keil uVision项目,并添加80C51固件库。
2. 编写C语言程序,实现以下功能:- 初始化外部中断0,设置中断触发方式为下降沿触发。
- 初始化定时器,用于产生中断。
- 编写外部中断0的中断服务程序,实现计数功能。
- 编写主函数,用于设置单片机的工作状态和显示计数结果。
3. 编译并下载程序到单片机。
4. 连接实验电路,包括按键、LED灯和单片机及其相关外围电路。
5. 观察实验现象,验证计数功能是否实现。
五、实验结果与分析1. 实验现象:按下按键,LED灯显示的计数值加1。
2. 分析:- 外部中断0的中断服务程序被正确调用。
- 计数变量在每次中断发生时加1。
- LED灯能够正确显示计数结果。
六、实验总结1. 本实验成功实现了通过外部中断实现计数功能,验证了单片机外部中断的工作原理。
2. 通过编写中断服务程序,掌握了中断编程方法。
3. 实验过程中,遇到了一些问题,如中断服务程序编写错误、程序编译错误等,通过查阅资料和调试,最终解决了问题。
4. 通过本次实验,提高了单片机编程和调试能力,加深了对单片机外部中断的理解。
nRF51822之PWM学习笔记

1 : 0);
Page 1
app_pwm.c
79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 return; } /**函数描述:使能指定PWM实例IRQ * * 参数[in] p_instance PWM实例 */ __STATIC_INLINE void pwm_irq_enable(app_pwm_t const * const p_instance) { nrf_drv_timer_compare_int_enable(p_instance->p_timer, PWM_MAIN_CC_CHANNEL); } /**函数描述:除能指定PWM实例IRQ中断使能标识 * * 参数[in] p_instance PWM实例 */ __STATIC_INLINE void pwm_irq_disable(app_pwm_t const * const p_instance) { nrf_drv_timer_compare_int_disable(p_instance->p_timer, PWM_MAIN_CC_CHANNEL); }
//禁止定时器中断 nrf_drv_timer_compare_int_disable(m_instances[timer_instance_id]->p_timer, PWM_MAIN_CC_CHANNEL); app_pwm_cb_t * p_cb = (app_pwm_cb_t *)m_instances[timer_instance_id]->p_cb; //调用PWM完整周期结束回调函数 用于设置标志位 通知应用程序 p_cb->p_ready_callback(timer_instance_id); }
外部中断实验报告

外部中断实验报告外部中断实验报告引言:外部中断是计算机系统中的一种重要机制,它可以响应外部事件并中断正在执行的程序。
本实验旨在通过设计和实现一个外部中断的示例,加深对外部中断的理解和应用。
实验目的:1. 理解外部中断的概念和原理;2. 掌握外部中断的编程方法;3. 设计和实现一个基于外部中断的应用。
实验设备和材料:1. 一台支持外部中断的计算机;2. 开发板或模块,用于外部中断的触发。
实验过程:1. 硬件连接:将开发板或模块与计算机连接,并确保连接正确和稳定。
2. 编写中断处理函数:在编程环境中,编写一个中断处理函数,用于处理外部中断触发时的操作。
可以根据实际需求,设计适当的处理逻辑。
3. 配置中断触发条件:根据实验要求,配置外部中断触发的条件。
可以通过设置开关、按键或其他外部信号来触发中断。
4. 编写主程序:编写一个主程序,用于初始化外部中断和执行其他操作。
在主程序中,需要配置外部中断的相关寄存器和中断向量表。
5. 运行实验:将程序下载到计算机中,并运行实验。
通过触发外部中断条件,观察中断处理函数的执行情况。
实验结果与分析:在实验中,我们成功实现了一个基于外部中断的应用。
当外部中断触发条件满足时,中断处理函数被调用,并执行相应的操作。
通过实验观察和分析,我们可以得出以下结论:1. 外部中断可以在计算机系统中实现对外部事件的及时响应,提高系统的实时性和可靠性。
2. 外部中断的触发条件可以灵活配置,可以通过外部设备或信号的变化来触发中断。
3. 中断处理函数的执行时间相对较短,可以在不影响主程序正常运行的情况下完成相应的操作。
4. 外部中断的应用范围广泛,可以用于实现各种实时控制、通信和交互功能。
实验总结:通过本次实验,我们深入了解了外部中断的原理和应用,并成功设计和实现了一个基于外部中断的应用。
外部中断作为计算机系统中的重要机制,具有重要的意义和应用价值。
在今后的学习和实践中,我们应进一步探索和应用外部中断,为计算机系统的性能和功能提供更多的可能性。
单片机中断实验总结

单片机中断实验总结单片机中断是单片机系统中一项重要的功能和特性。
通过中断,可以实现对外部事件的实时响应和处理,从而提高系统的实时性和可靠性。
在实验中,我对单片机中断进行了学习和实践,以下是我的实验总结。
在实验中,我首先了解了中断的基本概念和原理。
中断是指在程序执行过程中,由外部事件、硬件设备或软件请求而打断正常执行流程,转去执行与该事件或请求相关的子程序。
中断可以分为外部中断和内部中断。
外部中断是通过硬件引脚与外部设备进行连接并触发的,而内部中断则是由软件内部生成的。
中断的实现需要借助中断控制器,例如常用的单片机8051就内置了中断控制器。
实验中,我使用keil C编译器和STC89C52单片机开发板进行了中断的实现。
编写了一个简单的程序,当外部中断0引脚检测到高电平时,触发外部中断,执行相应的中断服务程序。
在编写程序时,首先定义了中断服务程序的函数原型,然后通过中断向量表将中断服务程序与相应的中断号关联起来。
在主程序中,使用IE寄存器和相应的位操作函数开启了外部中断。
在实验过程中,我遇到了一些问题,并进行了解决。
首先,我发现外部中断引脚的电平触发方式对中断的触发有影响。
通过查阅资料,我了解到外部中断引脚可以选择边沿触发还是电平触发,需要根据实际的需求进行设置。
其次,我发现在中断服务程序中,需要注意中断屏蔽和中断优先级的设置,以免出现中断互相屏蔽的情况。
最后,我发现中断服务程序中的代码需要尽量简洁和高效,以保证中断的响应时间和系统的实时性。
通过实验,我进一步理解了单片机中断的概念和原理,掌握了使用keil C编写中断程序的方法,提高了对单片机系统的认识和理解。
中断在单片机系统中具有重要的作用,可以实现对外部事件的实时响应和处理,从而提高系统的可靠性和实时性。
在今后的学习和实践中,我将进一步深化对中断的理解和应用,并将其应用到更为复杂的系统中。
参考内容:1. 《嵌入式系统原理与开发:使用51单片机和C语言》-程杰2. 《嵌入式系统与单片机原理实验教程》-王刚3. 《单片机原理与应用》-马利民4. STC89C52单片机数据手册5. Keil C51编译器使用手册。
单片机外部中断实训报告
一、实训目的1. 理解单片机外部中断的概念和作用。
2. 掌握单片机外部中断的配置方法。
3. 学会编写外部中断服务程序。
4. 通过实际操作,提高单片机编程和调试能力。
二、实训内容1. 单片机外部中断原理2. 单片机外部中断配置3. 外部中断服务程序编写4. 实验验证与调试三、实训环境1. 单片机开发板:选用STC89C52单片机。
2. 仿真软件:Proteus。
3. 实验工具:示波器、电源、连接线等。
四、实训步骤1. 理解单片机外部中断原理外部中断是单片机中断系统中的一种,用于响应外部事件。
当外部事件发生时,单片机会暂停当前程序,转去执行外部中断服务程序。
外部中断有多个中断源,如INT0、INT1等。
2. 单片机外部中断配置(1)设置外部中断触发方式:根据需要选择上升沿触发、下降沿触发或双边沿触发。
(2)设置外部中断优先级:根据实际需求设置中断优先级。
(3)设置外部中断使能:通过设置IE寄存器使能外部中断。
3. 外部中断服务程序编写编写外部中断服务程序,用于处理外部中断事件。
在服务程序中,完成相关处理逻辑,如记录外部事件发生次数、控制LED灯闪烁等。
4. 实验验证与调试(1)搭建实验电路:将单片机开发板与外部设备(如按钮)连接,设置好外部中断配置。
(2)在Proteus中搭建仿真电路,编写代码。
(3)下载代码到单片机开发板,观察实验现象。
(4)根据实验现象,调试程序,确保外部中断功能正常。
五、实验结果与分析1. 实验现象:按下外部按钮,单片机进入外部中断服务程序,控制LED灯闪烁。
2. 分析:通过设置外部中断触发方式、优先级和使能,成功实现外部中断功能。
在服务程序中,完成相关处理逻辑,达到预期效果。
六、实训总结1. 通过本次实训,掌握了单片机外部中断的配置方法,学会了编写外部中断服务程序。
2. 熟悉了外部中断在实际应用中的重要作用,提高了单片机编程和调试能力。
3. 在实训过程中,遇到了一些问题,如外部中断响应不及时、LED灯闪烁不稳定等。
单片机外部中断实验报告
单片机外部中断实验报告实验目的:1、理解单片机外部中断的原理和用途;2、掌握单片机外部中断的配置和使用方法。
实验器材:1、STC15W408AS单片机开发板;2、简单的电路连接器;3、按钮开关。
实验原理:单片机外部中断是通过外部硬件信号触发单片机的中断请求,在单片机运行过程中,当外部信号满足特定条件时,会触发中断,并暂停当前的运行程序,转而执行中断服务程序。
通过外部中断,可以实现对外部事件的实时处理。
实验步骤:1、将按钮开关与单片机开发板连接,将按钮开关的一端与单片机的INT0引脚连接,另一端与GND连接。
2、在开发板上连接好电源并供电。
3、打开Keil软件,新建一个工程,并选择合适的单片机型号。
4、配置单片机的外部中断功能,设置INT0引脚为中断输入。
5、编写中断服务程序,当INT0引脚检测到边沿信号时,执行中断服务程序,并在其中加入相应的处理代码。
6、编写主程序,配置相关的引脚和寄存器,使单片机进入中断模式,接受外部中断信号,并执行中断服务程序。
7、下载程序到单片机开发板上,运行程序。
8、按下按钮开关,触发外部中断,并查看实验结果。
实验结果:当按下按钮开关时,实时触发外部中断,单片机停止当前程序的运行,进入中断模式,并执行中断服务程序中的相应代码。
实验总结:通过这次实验,我对单片机的外部中断有了更深入的理解,并学会了如何使用外部中断实现对外部事件的及时处理。
外部中断广泛应用于各种实时系统和设备中,具有很大的实用价值。
在以后的学习和实践中,我会进一步掌握和应用单片机的外部中断功能。
nrf51822学习笔记之Peripheral interface

Peripheral interface外设接口所有外设可通过AHB和APB总线寄存器被访问,就如同通过task, event, interrupt寄存器进行访问一样.1、外设ID:每个外设都分配了0X1000 bytes 的空间,也就是说每个外设在APB总线上一共有1024个4 bytes的寄存器(0X1000=4096),第一个外设的基地址是0x4000 0000, ID号为0. 基地址为0x4000 1000的外设ID号为1,依次类推基地址为0x4001 F000的外设ID号为31.2、TASK :作用:用来触发外设的动作(actions),例如开始某个特定的行为。
外设都能实现不同的Task,每个Task在该外设任务寄存器组(peripheral’s task register group) 中都有一个单独的寄存器触发条件:可以通过软件写“1”到任务寄存器(task register)或者由外设本身或其他外设触发相应的任务信号来触发某个TASK3、Event:作用:用来通知外设或CPU某个事件发生了,例如某个外设的状态改变了。
一个外设能够产生多个Event,每个Event在事件寄存器组(peripheral’s event register group)中都有一个单独的寄存器。
产生条件: 外设本身触发了某个事件信号(event signal),于是事件寄存器(event register)会更新用以反映该事件的发生。
事件寄存器只有在软件向其写0的时候,才会被清零。
4、Shortcuts:链接同一个外设的事件(event)和任务(task)的快捷方式,当事件发生的时候可以通过Shortcuts直接触发任务。
与PPI的功能类似,但是传播时间比PPI更短。
快捷方式是被预先定义了的,用户不可以通过软件配置,用户只能对其进行使能和关闭。
一个快捷方式占1位,每个外设最多32个快捷方式。
5、Interrupts:中断由事件(event)产生,可以打断CPU程序流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最近要用nRF51822进行项目的多任务调度,其中不可避免的要用到要用到nRF51822的相关中断首先,nRF51822是基于Cortex-M0架构的MCU,根据nRF51822的软件开发包中的core-m0.h文件夹,可以找到51822的相关中断编号定义(Interrupt Number Definition)[objc]view plain copy1.<span style="font-size:18px;">/* ------------------------- Interrupt Number Definition ------------------------ */2.3.typedef enum {4./* ------------------- Cortex-M0 Processor Exceptions Numbers ------------------- */5. Reset_IRQn = -15, /*!< 1 Reset Vector, invoked on Powerup and warm reset */6. NonMaskableInt_IRQn = -14, /*!< 2 Non maskable Interrupt, cannot be stopped or preempted */7. HardFault_IRQn = -13, /*!< 3 Hard Fault, all classes of Fault*/8. SVCall_IRQn = -5, /*!< 11 System Service Call via SVC instruction */9. DebugMonitor_IRQn = -4, /*!< 12 Debug Monitor*/10. PendSV_IRQn = -2, /*!< 14 Pendable request for system service */11. SysTick_IRQn = -1, /*!< 15 System Tick Timer*/12./* ---------------------- nRF51 Specific Interrupt Numbers ---------------------- */13. POWER_CLOCK_IRQn = 0, /*!< 0 POWER_CLOCK*/14. RADIO_IRQn = 1, /*!< 1 RADIO*/15. UART0_IRQn = 2, /*!< 2 UART0*/16. SPI0_TWI0_IRQn = 3, /*!< 3 SPI0_TWI0*/17. SPI1_TWI1_IRQn = 4, /*!< 4 SPI1_TWI1*/18. GPIOTE_IRQn = 6, /*!< 6 GPIOTE*/19. ADC_IRQn = 7, /*!< 7 ADC*/20. TIMER0_IRQn = 8, /*!< 8 TIMER0*/21. TIMER1_IRQn = 9, /*!< 9 TIMER1*/22. TIMER2_IRQn = 10, /*!< 10 TIMER2*/23. RTC0_IRQn = 11, /*!< 11 RTC0*/24. TEMP_IRQn = 12, /*!< 12 TEMP*/25. RNG_IRQn = 13, /*!< 13 RNG*/26. ECB_IRQn = 14, /*!< 14 ECB*/27. CCM_AAR_IRQn = 15, /*!< 15 CCM_AAR*/28. WDT_IRQn = 16, /*!< 16 WDT*/29. RTC1_IRQn = 17, /*!< 17 RTC1*/30. QDEC_IRQn = 18, /*!< 18 QDEC*/31. LPCOMP_COMP_IRQn = 19, /*!< 19 LPCOMP_COMP*/32. SWI0_IRQn = 20, /*!< 20 SWI0*/33. SWI1_IRQn = 21, /*!< 21 SWI1*/34. SWI2_IRQn = 22, /*!< 22 SWI2*/35. SWI3_IRQn = 23, /*!< 23 SWI3*/36. SWI4_IRQn = 24, /*!< 24 SWI4*/37. SWI5_IRQn = 25 /*!< 25 SWI5*/38.} IRQn_Type;39.</span>在进行中断处理时,一般都要按照这个步骤:1、对要用到的中断初始化;2、对用到的中断进行使能;3、对中断进行优先级设置1、中断初始化nRF51822的外部I/O(暂时理解的程度以及用过的中断只有I/O中断,其他中断没有实践过)中断是基于任务和事件模式的。
按照nRF51822用户手册,每个GPIOTE通道的以下输入条件可以产生一个事件(在此可将事件理解为一个中断):上升沿、下降沿或者任何变化。
因此,在进行中断初始化的时候,首先要将相应的中断输入I/O引脚设置为输入模式。
然后通过CONFIG[n]设置GPIOTE通道的模式MODE(任务或者事件)、关联任务OUT[n]或者事件IN[n]的引脚PSEL,触发方式POLARITY。
例如下面是将ROCKER_INTERRUPT引脚初始化为事件下降沿触发的事件IN[0]。
[objc]view plain copy1.<pre name="code"class="objc">NRF_GPIOTE->CONFIG[0]=(GPIOTE_CONFIG_POLARITY_HiToLo<<GPIOTE_CONFIG_POLARITY_Pos)2. |(ROCKER_INTERRUPT<<GPIOTE_CONFIG_PSEL_Pos)3. |(GPIOTE_CONFIG_MODE_Event<<GPIOTE_CONFIG_MODE_Pos);1.NRF_GPIOTE->INTENSET=GPIOTE_INTENSET_IN0_Set<<GPIOTE_INTENSET_IN0_Pos; //ʹÄÜIN0ʼþ2、中断使能在中断初始化中仅仅是对事件n的使能,在此要对相应的中断进行使能。
类比于Cortex-M3架构,在MDK内与NVIC相关的寄存器,MDK为其定义了如下的结构体NVIC(Nested Vectored Interrupt Controller)嵌套中断向量控制器[objc]view plain copy1.<span style="font-size:14px;">/** \ingroup CMSIS_core_register2. \defgroup CMSIS_NVIC Nested Vectored Interrupt Controller (NVIC)3. \brief Type definitions for the NVIC Registers4. @{5. */6.7./** \brief Structure type to access the Nested Vectored Interrupt Controller (NVIC).8. */9.typedef struct10.{11. __IO uint32_t ISER[1]; /*!< Offset: 0x000 (R/W) Interrupt Set Enable Register */12. uint32_t RESERVED0[31];13. __IO uint32_t ICER[1]; /*!< Offset: 0x080 (R/W) Interrupt Clear EnableRegister */14. uint32_t RSERVED1[31];15. __IO uint32_t ISPR[1]; /*!< Offset: 0x100 (R/W) Interrupt Set PendingRegister */16. uint32_t RESERVED2[31];17. __IO uint32_t ICPR[1]; /*!< Offset: 0x180 (R/W) Interrupt Clear Pending Register */18. uint32_t RESERVED3[31];19. uint32_t RESERVED4[64];20. __IO uint32_t IP[8]; /*!< Offset: 0x300 (R/W) Interrupt Priority Register */21.} NVIC_Type;22.23./*@} end of group CMSIS_NVIC */</span>ISER[1]:中断使能寄存器。
由前边可以看到,nRF51的寄存器编号为0-25,在这里ISER[1]为32位寄存器,总共可以表示32个中断,bit0-bit25分别对应中断0-25(其实后来发现在NVIC_EnableIRQ()函数中是将1左移IRQn位之后又与0x1F,也就是空出了低五位,所以在这里应该是对应的高地址,而把低位给空出来的)。
要使能某个中断,必须设置相应的ISER位为1,使该中断被使能(这里仅仅是使能,还要配合中断分组、屏蔽、I/O口映射等设置才算是一个完整的中断设置)。
此处是按照STM32中断设置理解的。
ICER[1]:中断除能寄存器,和ISER的作用恰好相反,用来清除某个中断的使能的。
专门设置一个ICER来清除中断位,而不是向ISER写0来清除,这是因为NVIC的这些寄存器都是写1有效的,写0无效的。
ISPR[1]:中断挂起控制寄存器。
通过置1可以将正在进行的中断挂起,而执行同级或者更高级别的中断。
ICPR[1]:中断解挂控制寄存器。
通过置1可以将挂起的中断解挂。
IP[8]:中断优先级控制寄存器组。
这个寄存器组相当重要。
中断分组与这个寄存器密切相关。
在这里插入一下中断优先级的理解。
因为以前都是用的STM32,在这里就按照Cortex-M3架构来理解。