多路况下汽车防碰撞及行人保护预警系统设计
汽车碰撞监测与预警系统设计与实现
汽车碰撞监测与预警系统设计与实现随着汽车交通的不断发展和普及,汽车碰撞事故成为一种严重威胁道路安全的风险。
为了提高驾驶员的安全意识和行车素质,汽车碰撞监测与预警系统应运而生。
本文将探讨汽车碰撞监测与预警系统的设计与实现。
1. 系统总体设计汽车碰撞监测与预警系统的总体设计包括硬件、软件和通信子系统。
硬件设计方面,首先需要安装前向摄像头、红外传感器、毫米波雷达和控制单元等装置。
前向摄像头用于实时拍摄路面情况,红外传感器用于检测行驶中的物体,毫米波雷达则可以更加精准地探测周围环境。
控制单元将负责对传感器获取的数据进行处理和判断。
软件设计方面,其中最关键的是图像识别和数据分析算法。
图像识别算法可以识别前方的障碍物类型和距离,通过比对相关数据库中的车辆信息,判断是否存在碰撞的风险。
数据分析算法则负责对传感器获取的数据进行处理,通过对车辆运动轨迹、速度和加速度的分析,判断可能的碰撞情况。
通信设计方面,汽车碰撞监测与预警系统需要与车辆的中央计算机和位置导航系统进行通信。
通过与中央计算机通信,系统可以获取车辆的基本信息,并进行数据传输和处理。
与位置导航系统的通信可以实时获取车辆的位置信息,从而更加准确地预警驾驶员。
2. 功能实现汽车碰撞监测与预警系统主要包括前方碰撞预警、车道偏离预警和盲点检测等功能。
前方碰撞预警是系统的核心功能之一。
当系统检测到前方障碍物,并判断存在碰撞风险时,会通过视觉提示、声音警示或震动座椅等方式提醒驾驶员采取紧急刹车或躲避行动。
预警信息可以通过中央显示屏显示,同时也会通过语音指令告知驾驶员。
车道偏离预警可以有效防止驾驶员因为驾驶疲劳或分神导致车辆偏离车道。
当系统检测到车辆偏离车道时,会及时通过声音或震动进行提醒。
此外,还可以通过驾驶员座椅调整或方向盘振动来改变驾驶员的注意力。
盲点检测可以消除驾驶员在车辆转弯或换道时盲点带来的安全隐患。
系统会通过物体检测和距离计算算法检测侧后方的车辆,在有车辆进入盲区时,及时通过声音或显示指示驾驶员注意,并避免发生碰撞。
汽车防撞报警系统_毕业论文设计

汽车防撞报警系统_毕业论文设计汽车防撞报警系统引言随着汽车技术的不断发展,汽车安全问题引起了广泛关注。
尤其是近年来,由于交通事故造成的人员伤亡和经济损失越来越大,汽车防撞技术成为了汽车安全的重要组成部分。
汽车防撞报警系统是目前较为成熟的汽车主动安全技术之一,可以通过多种传感器来感知车辆周围的环境和动态信息,及时发出报警信号,避免或减小交通事故的发生。
本文主要介绍汽车防撞报警系统设计的相关技术原理和实现方法,旨在提高汽车行驶的安全性,为驾驶员提供更加安全、舒适的驾驶环境。
一、汽车防撞报警系统设计原理1.1 汽车防撞报警系统概述汽车防撞报警系统是一种集多种传感器、现代信息技术、控制单元等技术于一体的汽车安全保护装置。
它通过多种传感器来实时监测汽车周围的环境和动态信息,比如车速、车距等,一旦检测到有碰撞的危险,控制单元就会立即发出报警信号,提醒驾驶员注意,避免或减小交通事故的发生。
1.2 系统技术原理汽车防撞报警系统包括多个部分,主要有传感器、控制单元、报警器等,其技术原理如下:1)传感器传感器是汽车防撞报警系统的重要组成部分,其作用是感知车辆周围的环境和动态信息,将数据传递给控制单元。
通常用于汽车防撞报警系统的传感器主要有如下几种:(1)超声波传感器超声波传感器是一种常用的距离检测传感器,可以检测车辆前方的障碍物,计算出与前车的距离,从而判断是否存在碰撞危险。
(2)摄像头摄像头是一种视觉传感器,在汽车防撞报警系统中主要用于识别路标、车道和车辆等信息,同时也可以用于行人识别和交通信号灯感知。
(3)雷达传感器雷达传感器是一种远距离检测传感器,可以检测周围车辆的行驶状态,计算出与前车的距离和速度,从而判断是否存在碰撞危险。
(4)惯性传感器惯性传感器可以检测车辆的加速度、速度和方向等信息,常用于制动系统和 ESC (电子稳定控制系统)中。
2)控制单元控制单元是汽车防撞报警系统的核心部分,其作用是通过计算传感器传来的数据,判断车辆是否存在碰撞危险,并根据需要发出报警信号。
车辆预警系统项目设计方案

车辆预警系统项目设计方案一、背景和需求车辆行驶中可能会出现很多紧急情况,例如道路上的障碍物、前方的车辆突然刹车等。
这些情况可能会危及行车安全,因此车辆预警系统的出现为车辆安全提供了更全面的保障。
本项目旨在设计一款车辆预警系统,通过车辆传感器和GPS设备获得车辆行车信息,实现在行驶过程中对紧急情况的预警,并及时提醒驾驶员采取措施,帮助驾驶员降低行车风险。
二、系统设计2.1 系统架构本车辆预警系统采用分布式架构,主要分为前端、后端和数据库三个模块。
其中,前端负责展示车辆信息和获得驾驶员操作信息,后端负责处理车辆传感器和GPS设备获取到的数据,并根据预设规则进行判断分析。
数据库采用关系型数据库,主要用于存储车辆信息和预设规则,其中车辆信息包括车辆型号、车牌号、车辆所有人信息等,预设规则包括绕行路线、限速值等。
2.2 系统流程1.获取车辆传感器和GPS设备数据2.对数据进行筛选和预处理3.对预处理后的数据进行规则匹配分析4.发出预警信息并提供建议2.3 技术选型•前端:采用React框架•后端:采用Node.js、Express框架•数据库:采用MySQL数据库三、预警规则设计为了保证本系统的预警准确性和实用性,需要设置一些合理的预警规则。
3.1 超速预警通过GPS设备获取车辆行驶速度,与预设规则的限速值进行对比。
当车速超过限制速度时,发出超速预警。
3.2 盲区预警利用车辆传感器检测盲区内是否存在障碍物,当存在障碍物时,发出盲区预警。
3.3 路线预警通过车辆GPS设备获取车辆行驶路线,并与预设规则的绕行路线进行比对。
当车辆行驶不在绕行路线内时,发出路线预警。
四、功能实现4.1 前端设计前端界面需要直观、简洁,易于操作。
主要包括车辆信息的展示,预警信息的实时提示。
同时也需要提供一些可操作的按钮,如关闭、取消预警等。
4.2 后端实现后端主要包括数据获取、数据处理、规则匹配、预警信息输出等内容。
其中,数据获取可通过车辆传感器和GPS设备获取,数据处理包括了数据预处理和数据分析。
车辆前向碰撞预警方案
车辆前向碰撞预警方案
车辆前向碰撞预警系统是一种先进的车辆安全技术,可以通过车辆与周围环境
的感知,对前方的障碍物和车辆进行实时监测和预警,避免车辆的前向碰撞事故。
本文将介绍车辆前向碰撞预警方案的原理、实现方式和前景。
原理
车辆前向碰撞预警方案主要依靠雷达、摄像头、LIDAR等传感器,采集车辆前
方的车道信息、障碍物信息、前车信息等,通过传感器识别出前方的障碍物和车辆,并计算出与前车的距离、速度差等信息。
当车辆与前方的车辆或障碍物保持过近距离或速度差过大时,系统将发出警报,提醒驾驶员减速或采取其他避让措施,避免前向碰撞事故的发生。
实现方式
车辆前向碰撞预警方案的实现方式主要包括传感器、控制器和显示器三个部分。
传感器负责采集前方信息并将其传输到控制器,控制器根据传感器的信号计算前方车辆和障碍物的距离和速度,同时将这些信息传输给显示器,提供给驾驶员参考。
一般来说,车辆前向碰撞预警系统会采用多传感器融合的方式,将雷达、摄像头、LIDAR等传感器的数据融合在一起,提高系统的准确性和可靠性。
前景
随着人们对车辆安全性的越来越高的要求,车辆前向碰撞预警系统已经成为标配,越来越多的汽车品牌开始将其引入到汽车安全系统中。
据预测,未来车辆前向碰撞预警系统将继续发展壮大,传感器的精度和响应速度将进一步提升,同时与自动驾驶技术的结合也将为系统带来更多的功能和应用场景。
结论
车辆前向碰撞预警方案是一种重要的车辆安全技术,它将车辆与周围环境的感
知与实时计算相结合,以预测并避免前向碰撞事故的发生。
未来,随着技术的不断发展,车辆前向碰撞预警系统有望成为更加普及和可靠的车辆安全解决方案。
防碰撞方案

防碰撞方案防碰撞方案1. 引言在现代社会中,随着车辆数量的逐渐增多,交通安全的问题也成为人们关注的焦点。
其中,车辆碰撞事故是导致交通事故的主要原因之一。
为了减少车辆碰撞事故的发生,提高交通安全性,各种防碰撞方案相继被提出和应用。
本文将介绍几种常见的防碰撞方案,包括车辆被动防碰撞系统、主动防碰撞系统和先进驾驶辅助系统。
其中,被动防碰撞系统主要通过改进车辆结构和材料,提高车身的抗撞能力;主动防碰撞系统通过使用传感器和控制系统来监测和避免碰撞;先进驾驶辅助系统通过提供驾驶员相关信息和辅助功能,减少驾驶过程中的操作失误。
2. 被动防碰撞系统被动防碰撞系统主要通过改进车辆结构和材料,提高车身的抗撞能力,减少碰撞时对乘员的伤害。
2.1 高强度车身材料为了提高车身的抗撞能力,现代汽车生产中广泛采用高强度钢材料替代传统钢材。
高强度钢材料具有更高的屈服强度和抗拉强度,能够在碰撞时吸收更多的能量,减缓碰撞对乘员的冲击。
2.2 缓冲结构设计车辆的缓冲结构设计也是被动防碰撞系统的关键。
通过在车辆前部和侧部添加缓冲结构和变形区域,可以在碰撞时吸收和分散能量,减轻碰撞对乘员的冲击。
3. 主动防碰撞系统主动防碰撞系统通过使用传感器和控制系统来监测和避免碰撞。
常见的主动防碰撞系统包括紧急制动系统、车道偏离预警系统和自适应巡航控制系统。
3.1 紧急制动系统 (EBS)紧急制动系统是一种能够在检测到前方障碍物时自动进行制动操作的系统。
它通过前方雷达或摄像头等传感器实时监测道路前方的障碍物,一旦检测到碰撞的危险,系统会自动触发制动来避免碰撞。
3.2 车道偏离预警系统 (LDWS)车道偏离预警系统通过使用摄像头或其他传感器监测车辆是否偏离了当前车道。
如果系统检测到车辆偏离车道,会发出警告提醒驾驶员调整车辆方向,以避免碰撞事故的发生。
3.3 自适应巡航控制系统 (ACC)自适应巡航控制系统通过使用雷达或激光传感器等监测前方车辆的行驶状态,并根据距离和速度的变化自动调整车辆的巡航速度。
汽车防撞预警系统设计
汽车防撞预警系统设计一、系统概述汽车防撞预警系统主要由传感器、控制器、报警装置和执行机构四部分组成。
传感器负责实时监测车辆周围的环境信息,控制器对收集到的信息进行处理和分析,判断是否存在碰撞风险,如有风险,立即启动报警装置并控制执行机构进行干预。
二、传感器选型与布局1. 传感器选型为实现全天候、全方位的监测,本系统选用毫米波雷达、摄像头和超声波传感器三种传感器。
毫米波雷达具有穿透力强、抗干扰能力强等优点,适用于雨雾等恶劣天气;摄像头可识别道路标志、行人和车辆等目标;超声波传感器则用于检测车辆周围的近距离障碍物。
2. 传感器布局根据车辆结构和行驶需求,本系统将传感器均匀分布在车辆的前后左右四个方向,确保无死角监测。
具体布局如下:(1)前方:安装两个毫米波雷达,分别位于车辆前保险杠两侧,覆盖前方120°的监测范围。
(2)后方:安装一个毫米波雷达,位于车辆后保险杠中央,覆盖后方60°的监测范围。
(3)左右两侧:各安装一个摄像头,分别位于车辆左右两侧,覆盖左右两侧60°的监测范围。
(4)四周:安装四个超声波传感器,分别位于车辆前后保险杠和左右两侧,用于检测近距离障碍物。
三、控制器设计1. 算法设计(1)数据预处理:对传感器采集到的数据进行去噪、滤波等处理,提高数据质量。
(2)目标检测与识别:通过摄像头识别道路标志、行人和车辆等目标,结合毫米波雷达和超声波传感器数据,确定目标的位置、速度等信息。
(3)碰撞风险评估:根据目标的位置、速度等信息,计算与本车的相对距离和相对速度,预测未来一段时间内可能发生的碰撞情况。
(4)预警决策:根据碰撞风险评估结果,判断是否触发预警。
2. 硬件设计控制器硬件部分主要包括处理器、存储器、通信接口等。
处理器选用高性能、低功耗的嵌入式芯片,满足系统实时性和稳定性的需求;存储器用于存储算法模型和运行数据;通信接口负责与传感器、报警装置和执行机构进行数据交互。
汽车防撞预警系统毕业设计论文

汽车防撞预警系统毕业设计论文汽车防撞预警系统是一种基于先进传感技术和智能算法的车辆安全辅助系统,可以在汽车行驶过程中检测潜在的碰撞风险,并在情况危急时向驾驶员发出警示,起到保障行车安全的作用。
本论文旨在介绍汽车防撞预警系统的设计原理和实现方法,并通过仿真实验验证其效果。
首先,本论文将阐述汽车防撞预警系统的需求分析。
通过调研市场上已有的类似产品以及分析汽车事故的原因和危害,确定汽车防撞预警系统需要具备的功能和性能指标。
本文将重点讨论系统对前方障碍物的识别和跟踪能力、碰撞风险评估算法的准确性和实时性,以及警示手段的有效性等方面。
其次,本论文将详细介绍汽车防撞预警系统的设计原理。
系统主要由传感器模块、信号处理模块和警示模块组成。
传感器模块负责采集车辆周围环境的信息,包括摄像头、雷达和超声波传感器等。
信号处理模块负责对传感器采集的数据进行处理和分析,提取出障碍物的特征并进行跟踪,同时计算出碰撞风险评估值。
警示模块负责向驾驶员发出警示信号,可以通过声音、光线和振动等方式进行。
然后,本论文将探讨汽车防撞预警系统的实现方法。
针对传感器模块,本文将介绍摄像头、雷达和超声波传感器的工作原理和选型方法,并给出传感器的布置方案。
对于信号处理模块,本文将详细介绍特征提取和跟踪算法的设计原理和实现方法,以及碰撞风险评估算法的建立。
对于警示模块,本文将介绍警示信号的设计原则和警示手段的选择。
最后,本论文将通过仿真实验验证汽车防撞预警系统的效果。
通过搭建仿真平台,模拟不同场景下的碰撞风险,评估系统对障碍物的识别和跟踪准确性,以及碰撞风险评估算法的实时性和准确性。
同时,还将评估警示手段对驾驶员行为的影响,以及系统的用户友好性。
综上所述,本论文旨在通过设计和实现一种基于先进传感技术和智能算法的汽车防撞预警系统,为驾驶员提供更加安全和便捷的驾驶体验。
本论文将通过理论分析和仿真实验,验证系统的可行性和有效性。
汽车防撞预警系统设计任务书
任务书
任务书
3.对毕业设计成果的要求:
1.毕业设计论文一份;
2.外文资料翻译译文(含外文原文);
4.毕业设计工作进度计划:
起迄日期工作内容 2017年
2月13 日~ 3月20 日
3月23日~4月30日
5月1日~5月15日
5月16日~5月20日 5月21日~6月13日查阅相关资料,进行毕业设计的准备工作,编写开题报告,进行开题答辩。
研究分析汽车防撞预警系统的构成及软件模块
对汽车防撞预警系统设计方案予以设计总结
设计汽车防撞预警系统硬、软件应用及采用合适的测距方式
论文答辩
学生所在系审查意见:
系主任:
年月日。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 控制系统
主要由毫米波测距雷达和多个超声波测距传感器组成的测距电路、数据调制电路、主控制电路、 报警显示控制面板电路以及辅助制动电路组成,如图 3。 报警显示控制面板主要由显示器、报警蜂鸣器、报警 LED 灯、模式选择开关等组成,来完成系 统的主要数据分析控制,主从机之间的数据通信以及报警、显示和模式选择功能。并且接收车速、 制动踏板位置等传感器的信号,进行分析处理,实时监控汽车行驶状态。当从机发来测距数据,主 机计算之后做出相应操作。紧急情况下,控制安全带收紧、辅助制动装置辅助驾驶员控制车辆。
多路况下汽车防碰撞及行人保护预警系统设计
刘树峰,吕钊钦*
山东农业大学机械与电子工程学院, 山东泰安 271018 摘 要:研究设计一种多路况下的汽车防碰撞及行人保护的综合预警系统。采用毫米波雷达防碰撞系统和超声波雷达 侧面盲区行人保护系统的结合,实现汽车纵向和横向主动安全保护;通过引入附着系数这一参数,建立不同路况条 件下汽车安全距离计算模型;运用多传感器技术,实时监控驾驶员驾驶状态,减少系统的虚警率和误警率;设计一 种集显示,声音、灯光报警,模式选择为一体的控制面板。试验结果表明,系统能够根据不同行驶路况建立汽车安 全距离模型,对侧面不同速度行驶的汽车、行人准确识别并做出相应反应,报警显示控制面板操作简便,界面友好, 安全距离模型试验结果与 MATLAB 仿真结果相对误差在 7%以内。系统具有较高的环境适应性,能够提高汽车行车 的安全性。 关键词:防碰撞系统;行人保护;多路况;预警;主动安全 中图法分类号:U491.6 文献标识码:A 文章编号:1000-2324(2014)02-0210-06
warning system combines millimeter wave radar anti-collision system with ultrasonic radar side blind pedestrian protection system, which realizes the combination of vehicle longitudinal and lateral automatic protection. Besides, through the introduction of adhesion coefficient parameter, the calculation model of vehicle safety distance under multiple road conditions is established. What’s more, by using multi-sensor technology, it realizes the real-time monitoring of the driver state; consequently, the system false alarm rate can be reduced. This comprehensive warning system designs a kind of control panel which assembles display, sound, light alarm and mode selection. The test results show that according to multiple road conditions this system can establish vehicle safety distance model and make identification and immediate response to the vehicle and pedestrian that are at different speed from sides; in addition, alarm display control panel has simple operation and friendly interface. And the relative error between the results of safety distance model and the results of MATLAB simulation is within 7%. This system owns higher environmental adaptability, which greatly improves the automatic safety of vehicle driving.
山东农业大学学报(自然科学版),2014,45(2):210-215 Journal of Shandong Agricultural University (Natural Science Edition)
VOL.45 NO.2 2014 doi:10.3969/j.issn.1000-2324.2014.02.010
Keywords: Anti-collision system; pedestrian protection; multiple road conditions; early warning; active safety
在各国事故的类型调查中发现,引起交通事故的最主要原因是由于机动车驾驶人失误,其在各 种事故中的原因中所占比例高达 80%~90%,在我国所占比例达到 95%以上[1];汽车的正面追尾碰 造成系统 撞和侧面碰撞占交通事故的 90%以上。为解决传统研究中将汽车纵向[3]和横向[4]分开研究, 冗余复杂,和未考虑不同路况条件对汽车防碰撞系统影响的问题[5-7],本设计对汽车防碰撞[5]和行人 保护进行综合的研究。从主动保护入手,设计基于毫米波雷达和超声波测距雷达的纵向防碰撞、横 向行人保护以及转弯过程预警保护综合系统。
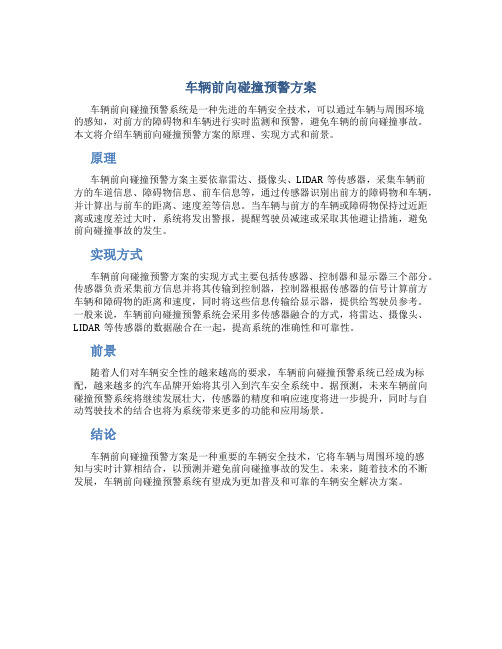
图 1 系统组成框图 Fig.1 Block diagram of system
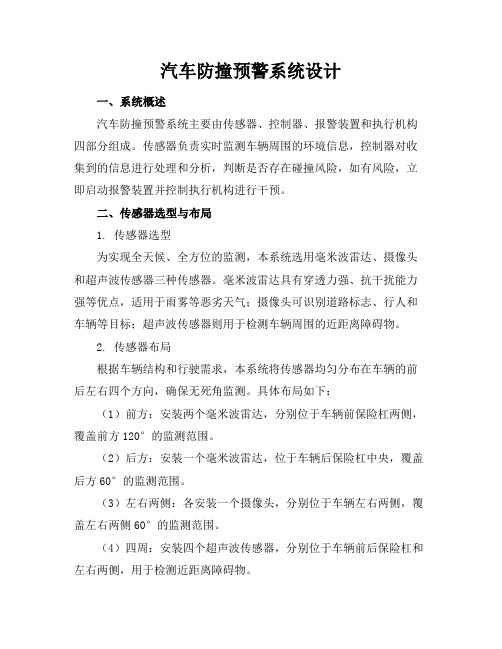
图 2 系统原理图 Fig.2 Principle diagram of system
1.2 工作原理 根据不同路况下的附着系数建立不同汽车安全距离模型,选择相应路况的距离安全模型,在正 面防碰撞中采用毫米波雷达对前方车辆距离、速度差等进行测量,一般状况下,声光系统预警,提 醒驾驶员,紧急状况下,能够进行紧急辅助制动。在侧面安全保护中,主要利用超声波测距雷达对 汽车两侧驾驶员视觉盲区的行人、车辆等障碍物进行监测,特别是在汽车转弯过程中实时测量汽车 内轮差内的障碍物,及时提醒驾驶员,并采取一系列紧急措施。通过汽车转向系统传感器,油门踏 板位置传感器,制动踏板位置传感器,以及温度、加速度等传感器综合感知驾驶员驾驶状态,从而 减少误警率和虚警率。系统在较高车速下才工作,较低车速时自动关闭。结构如图 2。
LCD12864
LCD12864
VCC K V O U TA VOUT P3 4 R T P3 3 NS C P3 2 PS B D7 D B7 D6 D B 6 D5 D B5 D4 D B4 D3 D B3 D2 D B 2 D1 D B1 D0 D B0 E RW E R / W RS RS O VCC V VDD V SS 10k 10k 10k 10k VOUT AT89C51 S1 S2 S3 VCC 3 2 1 S4 1 2 3 4 5 6 7 8 P32 13 P33 12 15 P34 14 31 22p Y1 CRYSTAL 22p 19 18 9 17 16 P10 P11 P12 P13 P14 P15 P16 P17 INT1 INT0 T1 T0 EA/VP X1 X2 RESET RD WR MCU RXD TXD ALE/P PSEN 10 11 30 29 P00 P01 P02 P03 P04 P05 P06 P07 P20 P21 P22 P23 P24 P25 P26 P27 39 38 37 36 35 34 33 32 1 2 3 4 5 6 7 8 16 15 14 13 12 11 10 9 D0 D1 D2 D3 D4 D5 D6 D7 RL VCC
3 软件系统与距离模型建立
3.1 系统主程序模块 首先调用初始化模块和路况选择模块,完成系统的初步设置。根据不同的情况完成不同行驶状 态下的全方位主动保护,并在显示面板上显示相关行驶环境数据,主程序流程如图 4。 3.2 系统防碰撞程序与纵向安全距离模型建立
•212•
山东农业大学学报(自然科学版)
1 系统组成和工作原理
1.1 系统组成 多路况下汽车防碰撞及行人保护预警系统主要包括以下几部分,如图 1:测距雷达收发模块:端
收稿日期:2013-02-22 修回日期:2013-03-21 基金项目:山东省泰安市科技创新行动计划项目(2012D2014) 作者简介:刘树峰(1990-),男,山东临沂人,硕士研究生,主要从事汽车电子技术研究. *通讯作者:Author for correspondence. E-mail:lzq@
第2期
刘树峰等:多路况下汽车防碰撞及行人保护预警系统设计
•211•
收回波信号,完成雷达信号的发送和接收。数据采集调制模块:实时的采集回波信号,并且进行相 应的数模转换,以供信息处理系统的使用。信息处理模块:即微处理器控制单元,接收来自数据采 集调制系统的信息,并且进行数据分析,从而判断行驶安全性。声光报警显示模块:分为声音报主 要是两种测距雷达,即毫米波测距雷达、超声波测距雷达,雷达产生所需的波频信号,通过接收警 和灯光报警,根据不同的安全情况,进行不同报警,并且对相应信息进行显示。辅助制动模块:控 制汽车电子制动器、离合器等,在紧急情况下辅助驾驶员制动汽车,同时安全带预紧装置工作,保 护驾驶员。传感器感知模块: 通过汽车转向系统传感器,油门踏板位置传感器,制动踏板位置传感 器,以及温度,速度等传感器综合感知汽车行驶状态,从而减少误警率和虚警率。路况选择控制模 块:主要包括系统开关和路况模式选择开关,控制系统开闭和不同路况模式的选择,以及输入键盘 进行路况控制。
第 45 卷
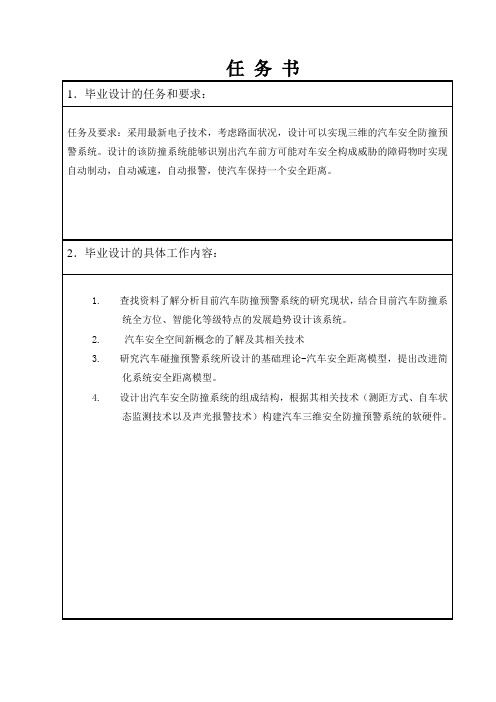
3.2.1 防碰撞程序模块 根据驾驶员的路况选择建立所对应的路况的纵向安全距离模型。安全距离模 型分为三个距离阶段:安全行驶距离 Ss、提醒报警距离 Sr 和紧急辅助制动距离 Se。系统实时接收测 距传感器所测与前方障碍物的距离,并与三段状态距离进行对比,根据不同距离状况作出不同的反 应。在安全行驶距离 Ss,汽车正常行驶,系统显示器显示车辆无障碍、行驶安全;提醒报警距离 Sr 给予驾驶员充足的反应时间,并能够进行正确的习惯操作,在进入提醒报警距离后,系统的声光报 警装置会进行报警提醒驾驶员注意,驾驶员采取相应措施恢复到安全距离之后,停止报警,如果驾 驶员未采取相应措施,系统显示器显示车辆有障碍、注意安全,声光报警进行持续报警,并随距离 的减少,蜂鸣器声音尖锐,LED 报警灯闪烁频率增大;在进入紧急辅助制动距离 Se 后,安全带预紧 装置工作, 系统自动控制辅助制动系统制动汽车, 在距离前方车辆最短安全距离 Sm 时车辆完全制动, 程序如图 5。