共轭梯度法
共轭梯度法公式

共轭梯度法公式
共轭梯度法是一种用于求解线性方程组的迭代算法。
其主要思想是通过利用前一次迭代的信息来加速当前迭代的速度,从而减少迭代次数和计算量。
共轭梯度法公式包括以下几个步骤:
1. 初始化:设初始解为x0,残量b0为Ax0-b,共轭方向d0=b0。
2. 迭代求解:对于第k次迭代,计算步长αk,使得xk+1=xk+αkd,其中d是共轭方向,满足dTkAd=0,即d是A的共轭向量。
3. 更新残量:计算新的残量bk+1=Axk+1-b,如果bk+1小于预设精度,则停止迭代。
4. 更新共轭方向:计算新的共轭方向dk+1=bk+1+βkdk,其中βk=(bk+1)Tbk+1/(bk)Tbk,保证dk+1与之前的共轭方向都是A的共轭向量。
5. 重复迭代,直到满足收敛条件,返回最终解xk+1。
共轭梯度法是一种高效的求解大型线性方程组的方法,尤其适用于稀疏矩阵和对称正定矩阵。
公式简单易懂,容易实现,且具有较快的收敛速度。
- 1 -。
共轭梯度法步骤

共轭梯度法步骤共轭梯度法是一种求解线性方程组的迭代算法,它以高效稳定的特点而广受欢迎。
以下是共轭梯度法的步骤:步骤1:初始化首先,我们需要有一个初始向量x0和一个初始残量r0=b-Ax0。
其中,A为系数矩阵,b为常数向量。
步骤2:计算方向向量令d0=r0,表示第一次迭代的方向向量。
步骤3:计算步进长度令α0=(r0·r0)/(d0·Ad0),其中·表示向量的点积。
α0表示迭代过程中每个方向向量的步进长度。
步骤4:更新解向量令x1=x0+α0d0,表示迭代后的解向量。
步骤5:计算新残量令r1=r0-α0Ad0。
步骤6:判断终止条件如果r1的范数小于预设阈值,或者迭代次数达到预设次数,终止迭代。
否则,进入下一次迭代。
步骤7:更新方向向量令β1=(r1·r1)/(r0·r0),表示更新方向向量的轴线。
步骤8:计算新方向向量令d1=r1+β1d0,表示新的迭代方向向量。
步骤9:计算新的步进长度令α1=(r1·r1)/(d1·Ad1)。
步骤10:更新解向量令x2=x1+α1d1。
步骤11:更新残量令r2=r1-α1Ad1。
步骤12:重复步骤6至11,直至满足终止条件。
总结起来,共轭梯度法的步骤主要包括初始化、计算方向向量、计算步进长度、更新解向量、计算新残量、判断终止条件、更新方向向量、计算新的步进长度、更新解向量和更新残量等。
该算法迭代次数较少,收敛速度快,适用于大规模线性方程组的求解。
共轭梯度法
•基本思想:把共轭性与最速下降法相结合,利用已 知点处的梯度构造一组共轭方向,并沿着这组方 向进行搜索,求出目标函数的极小点
4.4共轭梯度法
先讨论对于二次凸函数的共轭梯度法,考虑问题
min f (x) 1 xT Ax bT x c
3, giT d (i) giT gi (蕴涵d (i) 0)
证明: 显然m1,下用归纳法(对i)证之.
当i 1时,由于d (1) g1,从而3)成立,对i 2时, 关系1)和2)成立,从而3)也成立.
4.4共轭梯度法
设对某个i<m,这些关系均成立,我们证明对于i+1
也成立.先证2),
因此
2 / 3 1 5/ 9
d (2)
1/ 1
3
1 9
2 0
5/9 1
从x(2)出发,沿方向d (2)进行搜索,求步长2,使满足 :
f
( x (1)
2d (1) )
min
0
f
(x(2)
d (2))
2 0
4.4共轭梯度法
显然, d (1)不是目标函数在x(1)处的最速下降方向.
下面,我们用FR法构造两个搜索方向.
从x(1)出发,沿方向d (1)进行搜索,求步长1,使满足 :
f
( x (1)
1d (1) )
min
0
f
( x (1)
d (1) )
得1 2 3
A正定,故x是f(x)的极小值点.
共轭梯度法
最速下降法1.最速下降方向函数f(x)在点x处沿方向d的变化率可用方向导数来表示。
对于可微函数,方向导数等于梯度与方向的内积,即:Df(x;d) = ▽f(x)T d,因此,求函数f(x)在点x处的下降最快的方向,可归结为求解下列非线性规划:min ▽f(x)T ds.t. ||d|| ≤ 1当 d = -▽f(x) / ||▽f(x)||时等号成立。
因此,在点x处沿上式所定义的方向变化率最小,即负梯度方向为最速下降方向。
2.最速下降算法最速下降法的迭代公式是x(k+1) = x(k) + λk d(k) ,其中d(k)是从x(k)出发的搜索方向,这里取在x(k)处的最速下降方向,即d = -▽f(x(k)).λk是从x(k)出发沿方向d(k)进行一维搜索的步长,即λk满足f(x(k) + λk d(k)) = min f(x(k)+λd(k)) (λ≥0).计算步骤如下:(1)给定初点x(1) ∈ R n,允许误差ε> 0,置k = 1。
(2)计算搜索方向d = -▽f(x(k))。
(3)若||d(k)|| ≤ε,则停止计算;否则,从x(k)出发,沿d(k)进行一维搜索,求λk,使f(x(k) + λk d(k)) = min f(x(k)+λd(k)) (λ≥0).(4)令x(k+1) = x(k) + λk d(k),置k = k + 1,转步骤(2)。
共轭梯度法1.共轭方向无约束问题最优化方法的核心问题是选择搜索方向。
以正定二次函数为例,来观察两个方向关于矩阵A共轭的几何意义。
设有二次函数:f(x) = 1/2 (x - x*)T A(x - x*) ,其中A是n×n对称正定矩阵,x*是一个定点,函数f(x)的等值面1/2 (x - x*)T A(x - x*) = c是以x*为中心的椭球面,由于▽f(x*) = A(x - x*) = 0,A正定,因此x*是f(x)的极小点。
共轭梯度法
必有
p
T j
∇f
(X
n
)
=0(源自j=0,1,L,
n
− 1)
因为A正定,所以f (X ) 是凸函数,故 X n 是惟一的全局 极小点。
从而
∇f (Xk ) = AXk + b
=
AX
j+1
+
λ* j+1
Apj+1
+L+
λ* k −2
Apk−2
+
λ* k −1
Apk
−1
+
b
=
∇f
(X
⎡6 ⎢⎣17
12⎤ 17⎥⎦
⎢⎣⎡−
90 289
−
210⎤ 289⎥⎦
T
−
210⎤⎡ 3 289⎥⎦⎢⎣−1
−11⎥⎦⎤⎢⎣⎡−
90 289
−
210⎤T 289⎥⎦
= 17 10
X2
=
X1
+
λ1 p1
=
⎡ 26 ⎢⎣17
38 ⎤ T 17 ⎥⎦
+ 17 10
⎢⎣⎡−
90 289
−
210 ⎤ T 289 ⎥⎦
= [1
1]T
∇f ( X 2 ) = [0 0]T
练习: 试用共轭梯度法二次函数
min
f
(x)
=
x12
+
1 2
x22
+
1 2
x32
的极小点。取初始点为x( 0 ) = (1,1,1)T
3 、非二次函数的共轭梯度法
一般地,我们有:
⎧ X k+1 = X k + λk pk
共轭梯度法
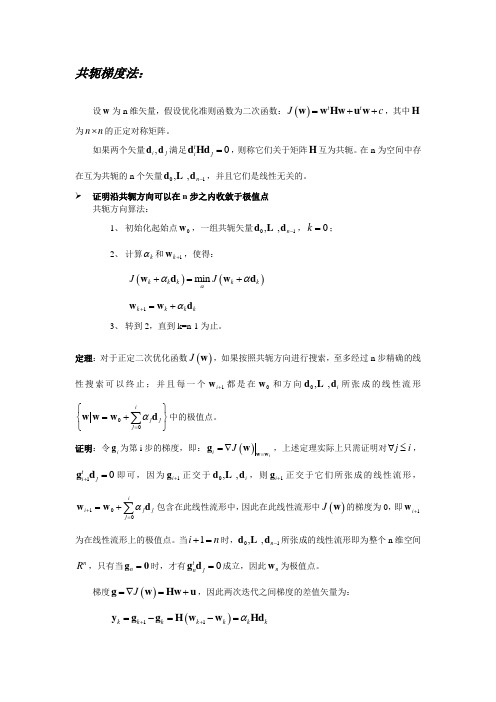
共轭梯度法:设w 为n 维矢量,假设优化准则函数为二次函数:()t t J c =++w w Hw u w ,其中H 为n n ⨯的正定对称矩阵。
如果两个矢量,i j d d 满足0ti j =d Hd ,则称它们关于矩阵H 互为共轭。
在n 为空间中存在互为共轭的n 个矢量01,,n -d d ,并且它们是线性无关的。
证明沿共轭方向可以在n 步之内收敛于极值点共轭方向算法:1、 初始化起始点0w ,一组共轭矢量01,,n -d d ,0k =;2、 计算k α和1k +w ,使得:()()min k k k k k J J ααα+=+w d w d 1k k k k α+=+w w d3、 转到2,直到k=n-1为止。
定理:对于正定二次优化函数()J w ,如果按照共轭方向进行搜索,至多经过n 步精确的线性搜索可以终止;并且每一个1i +w 都是在0w 和方向0,,i d d 所张成的线性流形00i j j j α=⎧⎫=+⎨⎬⎩⎭∑w w w d 中的极值点。
证明:令i g 为第i 步的梯度,即:()i i J ==∇w w g w ,上述定理实际上只需证明对j i ∀≤,10ti j +=g d 即可,因为1i +g 正交于0,,i d d ,则1i +g 正交于它们所张成的线性流形,100ii j j j α+==+∑w w d 包含在此线性流形中,因此在此线性流形中()J w 的梯度为0,即1i +w 为在线性流形上的极值点。
当1i n +=时,01,,n -d d 所张成的线性流形即为整个n 维空间n R ,只有当n =g 0时,才有0tn j =g d 成立,因此n w 为极值点。
梯度()J =∇=+g w Hw u ,因此两次迭代之间梯度的差值矢量为:()11k k k k k k k α++=-=-=y g g H w w Hd对于j i ∀<:()111111111tt tttt ti j i j i j i j i j i j j ji t t j j k k j k j i tt j j k k j k j α++-+++=++=+=-+-+-+=+-=+∑∑g d g d g d g d g d g d g d g d g g d g d d Hd因为1k +w 是沿着j d 方向搜索的极值点,因此10tj j +=g d ,而0,,i d d 互为共轭,所以有10i t k k j k j α=+=∑d Hd ,因此:10ti j +=g d上述定理得证。
共轭梯度法总结
共轭梯度法总结
共轭梯度法总结
一、什么是共轭梯度法
共轭梯度法(Conjugate Gradient Method),是一种用于求解线性方程组的迭代优化算法,它是一种搜索梯度的迭代算法。
共轭梯度法的基本思想是沿梯度的反方向搜索,并在每一步令搜索的方向接近更新的局部梯度。
它是一种非常有效的求解有约束的非线性优化问题的方法,是求解线性方程组的有效算法。
共轭梯度法可以看作是一种极小化函数的迭代方法,它最主要的思想是不断更新梯度的方向,从而寻找函数值最小的点。
二、共轭梯度法的原理
共轭梯度法是一种迭代优化算法,它以凸二次型函数为例,可以用来求解最小值问题。
它的基本思想是:
(1)首先求得函数的梯度,即每一步优化的搜索方向,使梯度变为最小;
(2)以梯度的反方向搜索,令搜索的方向接近更新的局部梯度,而不是与旧的梯度成正比的步长;
(3)逐步更新搜索的方向为新的梯度;
(4)重复这个过程,直到所有的自变量满足限制条件。
三、共轭梯度法的优缺点
共轭梯度法最大的优点是它具有收敛速度快,可以在有限的迭代步数内收敛到最优解;另外,它还具有计算量小,不需要计算精确的
Hessian矩阵的优点。
共轭梯度法的缺点是它不能用来求解非凸优化问题,因为它只能求解凸优化问题;另外,它也不能用于强不可约的优化问题。
共轭梯度法beamforming_理论说明

共轭梯度法beamforming 理论说明1. 引言1.1 概述共轭梯度法(Conjugate Gradient Method)是一种常用的优化算法,广泛应用于解决线性方程组和最优化问题。
Beamforming是一种利用信号处理技术来实现指向性传输和接收的方法,在通信、雷达等领域有着广泛的应用。
本篇长文将探讨共轭梯度法在Beamforming中的理论应用。
1.2 文章结构本文将按照以下结构进行论述:首先介绍共轭梯度法的原理和基本思想,包括线性方程求解的问题、共轭梯度法的基本思想以及迭代过程与收敛性分析;然后,将详细阐述Beamforming的基本概念,包括信号传输和接收的需求、Beamforming技术在通信中的应用以及技术实现原理和方法;接着,我们将探究共轭梯度法在Beamforming中的具体应用,涵盖了优化问题表述、目标函数定义及优化过程说明以及基于共轭梯度法的Beamforming实例分析与结果讨论;最后总结主要研究发现并展望取得成果和应用前景,并提出后续研究工作的建议。
1.3 目的本文的目标是通过理论说明共轭梯度法在Beamforming中的应用,以深入探讨这一优化算法在指向性传输和接收技术中的实际效果。
通过对共轭梯度法及其在Beamforming中的应用进行分析,旨在提供有关该算法与通信技术结合方面的研究参考,为相关领域的学者和工程师提供新思路和解决问题的方法。
2. 共轭梯度法的原理2.1 线性方程求解的问题在讨论共轭梯度法的原理之前,我们首先来了解一下线性方程求解的问题。
线性方程组是由多个线性等式组成的方程组,如Ax = b,其中A为已知矩阵,x为待求解向量,b为已知向量。
线性方程求解即为找到满足该方程组的解x。
2.2 共轭梯度法的基本思想共轭梯度法是一种用于求解对称正定线性方程组Ax = b的迭代方法。
它基于以下基本思想:通过选择合适的搜索方向,将目标函数在各个搜索方向上取得最小值,并以此逼近实际的最优解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
锯齿现象
在极小点附近,目标函数可以用二次函数近似,其等值面近似 椭球面。
x2 x1
x*
x3
注 最速下降方向反映了目 标函数的一种局部性质。它只是 局部目标函数值下降最快的方向。 最速下降法是线性收敛的算法。
梯度法(最速下降法):
1. 搜索方向:r(k) f (x(k) ) ,也称为最速下降方向;
• (2)在确定搜索方向上,用什么方法进行一 维搜索?
基本迭代格式 xk1 xk tk dk
几个概念
1。梯度:
f(x)是定义在Rn上的可微函数,称以f(x)的n个偏 导数为分量的向量,为f(x)的梯度,记作▽ f(x)
即
T
f
(
x)
f (x) x1
,
f (x) x2
,
...,
f (x) xn
什么情况下迭代可以停止了呢?
(r (k ) )T r (k ) 或者 || f ( x (k) ) ||
由于 r(k1) b Ax(k1) b A(x(k) tk r(k ) ) r(k ) tk Ar(k )
(r (k ) )T r (k 1) (r (k ) )T (r (k ) tk Ar (k ) ) 0
3.3.5 最速下降法和共轭梯度法
--多变量函数寻优法
1.等价的极限问题
设 x * 是方程组 Ax b 的精确解
即:Ax* b
若A是正定对称矩阵,则当且仅当x=x*时,二次函数
F0 (x) (x x*)T A(x x*) xT Ax 2bT x (x*)T Ax *
达到极小值。F0 (x*) 0
2。梯度向量:
称
f
(
x0
)
f (x0 x1
)
,
f (x0 x2
)
,
...,
f (x0 xn
)
T
为f(x) 在x0处的梯度向量。
3。梯度▽ f(x)的模:
|| f ( x) ||
f ( x x1
)
2
f ( x) x2
2
,
f ( x xn
)
2
几个梯度公式
• 1。f(x)=C(常数),则▽f(x)=0。 • 2。 f(x)=bTx,则 ▽f(x)=b; • 3。 ▽ (xTx)=2x; • 4。若A是实对称方阵,则有▽ (xTAx)=2Ax;
解: f ( x) ( 2x1 ,6x2 )T , r1 f (x1) ( 4, 6 )T .
x1 tr1 ( 2 4t ,1 6t )T .
令 g(t) f (x1 tr1) (2 4t)2 3(1 6t)2 ,
求解 min g(t)
t
令 g(t) 8( 2 4t) 36(1 6t ) 0
t1
13 62
x2
x1
t1r1
(
36 , 31
8 31
)T
3.共轭梯度法
定理 2. 设有函数 f ( x) 1 xT Ax bT x c , 2
其中 A是 n阶对称正定矩阵。d (1) , d (2) ,..., d (k) 是一组A共轭向量。
所以 r(0) (b Ax(0) )
是 x(0) 下降速度最快的方向。
因此沿直线 x x(0) tr(0)
求F(x)的极小值点x*。也就选择t使得; g(t) F (x) F (x(0) tr (0) ) (x(0) tr (0) )T A(x(0) tr (0) ) 2bT (x(0) tr (0) ) F (x(0) ) 2tr (0) (r (0) )T t 2 (r(0) )T Ar(0)
当cos 1 时,gkTdk 取极小值. dk gk .
结论:负梯度方向使 f x 下降最快,亦即最速
下降方向.
优化设计追求目标函数值最小,搜索方向取该点的负梯度 方向,使函数值在该点附近的范围内下降最快。
F
(
x0
)
f (x0 x1
)
,
ห้องสมุดไป่ตู้
f (x0 x2
)
,
...,
f (x0 xn
)
T
2( Ax(0) b) 2r(0)
X E n 求解的基本思想 ( 以二元函数为例 )
f (x1 x2 )
连 续 可 微
0
x1
x2
f (X0) f (X1) f (X2)
X0
31
X1
X2
x2
5
0
x1
关于无约束极小问题普遍使用下降迭代算法, 每一类下降选代算法中包含两个关键步骤:
得到一个迭代点x(k)后, • (1) 如何选择搜索方向d(k)?
2. 搜索步长 : tk
取最优步长,
即满足
f (x(k)
tk
r
(k)
)
min t
f (x(k)
tr(k) ) 。
梯度法算法步骤:
1. 给定初始点 x(0) Rn ,允许误差 0, 令k 1。
2. 计算搜索方向 t(k) f (x(k) ) ;
3. 若|| r(k) || ,则停止计算,x(k)为所求极值点;否则,求最优步长 tk
使得
f
(x(k)
tkr(k) )
min t
f
(x(k)
tr(k) )。
4. 令 x(k1) x(k ) tk r(k ) , 令 k : k 1, 转2。
例. 用最速下降法求解: min f ( x) x12 3x22 ,设初始点为x1 ( 2,1)T , 求迭代一次后的迭代点 x2。
2.最速下降法
讨论如何从 x(0) 出发,求F(x)的极小值点。
基本迭代格式 xk1 xk tk dk
问题的提出
在点 xk 处,沿什么方向 dk , f x下降最快?
分析:f xk dk f xk gkTdk o dk 0
考查: gkTdk gk dk cos
gk f ( xk )
达到极小值点,即 g(t) 0
t0
(r (0) )T r (0) (r (0) )T Ar (0)
从而得到新的近似点 x(1)
用同样的方法就可以得到 x(2)
一般的
x(k 1)
tk
x(k) tk r(k) (r (k ) )T r(k ) (r(k ) )T Ar(k )
r(k) b Ax(k)
极小值与函数相同
F (x) xT Ax 2bT x
所以求解 Ax b
等价于求函数的极小值 F (x) xT Ax 2bT x
设A是对称正定矩阵,则函数族
{F (x) c; x Rn , c R}
代表 Rn 中的一族n维球面,x*是这个球面的中心
求解无约束最优化问题的基本思想
min f X