(完整版)轮系试题
第六章 轮系计算题专项训练(附答案)
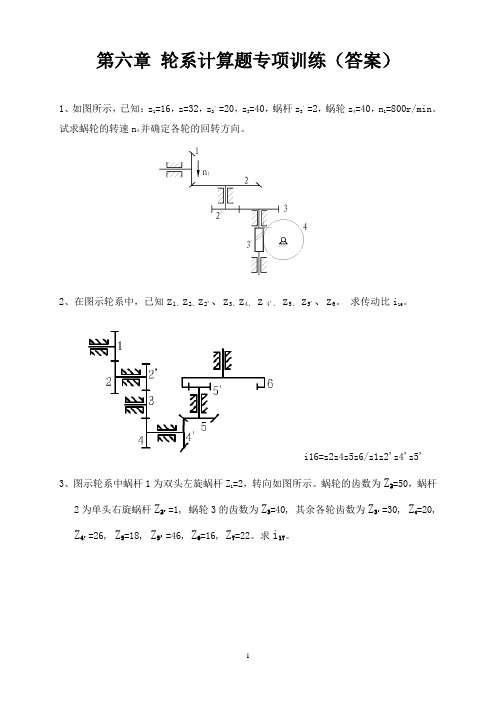
第六章轮系计算题专项训练(答案)1、如图所示,已知:z1=16,z=32,z2,=20,z3=40,蜗杆z3,=2,蜗轮z4=40,n1=800r/min。
试求蜗轮的转速n4并确定各轮的回转方向。
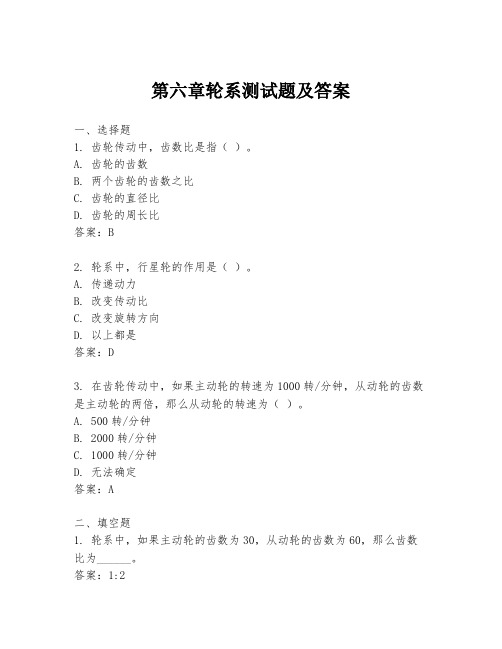
2、在图示轮系中,已知z1、z2、z2'、z3、z4、z4'、z5、z5'、z6。
求传动比i16。
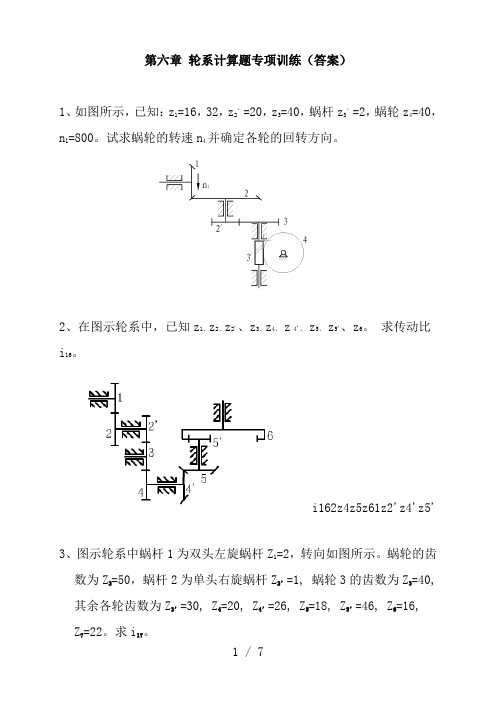
i16=z2z4z5z6/z1z2'z4'z5'3、图示轮系中蜗杆1为双头左旋蜗杆Z1=2,转向如图所示。
蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40, 其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。
求i17。
i17=Z2Z3Z4Z5Z6Z7/Z1Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26*46= 220.74、在习题图8所示的轮系中,已知z1=15 , z2=25 , z2’=15 , z3=30 , z3’=15 , z4=30,z 4’=2 , z5=60, 若n1=500 r/min,求齿轮5转速的大小和方向。
(n5=2.5 r/min , 顺时针)2002151515603030254534231251=⨯⨯⨯⨯⨯⨯=='''zzzzzzzznn,)/(5.220050020015m r n n ===;齿轮5的方向可以画箭头确定。
5、在图示轮系中,已知z 1、z 2、z 2'、z 3、z 4、 z 4'、z 5、 z 5'、z 6。
求传动比i 16。
6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。
试计算轮系的传动比15i 并确定齿轮5的转动方向。
第六章轮系测试题及答案
第六章轮系测试题及答案一、选择题1. 齿轮传动中,齿数比是指()。
A. 齿轮的齿数B. 两个齿轮的齿数之比C. 齿轮的直径比D. 齿轮的周长比答案:B2. 轮系中,行星轮的作用是()。
A. 传递动力B. 改变传动比C. 改变旋转方向D. 以上都是答案:D3. 在齿轮传动中,如果主动轮的转速为1000转/分钟,从动轮的齿数是主动轮的两倍,那么从动轮的转速为()。
A. 500转/分钟B. 2000转/分钟C. 1000转/分钟D. 无法确定答案:A二、填空题1. 轮系中,如果主动轮的齿数为30,从动轮的齿数为60,那么齿数比为______。
答案:1:22. 在一个行星轮系中,太阳轮的转速为200转/分钟,行星轮的转速为100转/分钟,那么行星架的转速为______。
答案:150转/分钟三、简答题1. 请简述轮系的基本组成。
答案:轮系通常由主动轮、从动轮、行星轮和行星架组成。
2. 轮系在机械传动中有什么作用?答案:轮系在机械传动中主要用于改变转速和扭矩,实现动力的传递和分配。
四、计算题1. 已知一个齿轮传动系统,主动轮齿数为40,从动轮齿数为80,求传动比。
答案:传动比为2:1。
2. 一个行星轮系中,太阳轮齿数为20,行星架固定,行星轮齿数为40,求行星轮的转速,如果太阳轮的转速为500转/分钟。
答案:行星轮的转速为1000转/分钟。
五、论述题1. 论述齿轮传动和轮系传动在机械设计中的重要性。
答案:齿轮传动和轮系传动在机械设计中具有至关重要的作用。
它们不仅可以实现动力的高效传递,还可以通过改变齿数比来调整转速和扭矩,满足不同的工作需求。
此外,轮系传动还可以实现复杂的运动控制,如改变旋转方向和实现多轴驱动等,对于提高机械设备的性能和灵活性具有重要意义。
第六章-轮系计算题专项训练(附答案)
第六章轮系计算题专项训练(答案)1、如图所示,已知:z1=16,32,z2,=20,z3=40,蜗杆z3,=2,蜗轮z4=40,n1=800。
试求蜗轮的转速n4并确定各轮的回转方向。
2、在图示轮系中,已知z1、z2、z2'、z3、z4、z4'、z5、z5'、z6。
求传动比i16。
i162z4z5z61z2'z4'z5'3、图示轮系中蜗杆1为双头左旋蜗杆Z1=2,转向如图所示。
蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40, 其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。
求i17。
i172Z3Z4Z5Z6Z71Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26* 46= 220.74、在习题图8所示的轮系中,已知z1=15 , z2=25 , z2’=15 , z3=30 , z3’=15 , z4=30, z4’=2 , z5=60, 若n1=500 ,求齿轮5转速的大小和方向。
(n 5=2.5 , 顺时针)2002151515603030254534231251=⨯⨯⨯⨯⨯⨯=='''z z z z z z z z n n ,)/(5.220050020015m r n n ===;齿轮5的方向可以画箭头确定。
5、在图示轮系中,已知z 1、z 2、z 2'、z 3、z 4、 z 4'、 z 5、 z 5'、z 6。
求传动比i 16。
6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。
试计算轮系的传动比15i 并确定齿轮5的转动方向。
第六章 轮系计算题专项训练(附答案)
第六章轮系计算题专项训练(附答案)1、已知齿数和转速,求蜗轮的转速和各轮的回转方向。
齿数和转速的关系可以用传动比公式i=n1/n4来表示,因此先求出传动比i,再用i和n1求出n4.i的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=220.7.然后代入i 和n1=800r/min,求得n4=3.62r/min。
回转方向可以根据齿轮的齿数和传动方式(直接传动或倒置传动)来确定。
2、已知各轮的齿数,求传动比i。
传动比的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.3、已知各轮的齿数和蜗杆的参数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=17.4、已知各轮的齿数和主动轴的转速,求齿轮5的转速和方向。
先用传动比公式i=n1/n5求得i=200,再用i和n1=500r/min求得n5=2.5r/min。
齿轮5的方向可以根据箭头来确定。
5、已知各轮的齿数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.6、已知各轮的齿数和主动轴的转速,求传动比i和齿轮5的转动方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=40.齿轮5的方向可以根据箭头来确定。
7、已知各轮的齿数和蜗杆的参数,求传动比i和轮6的转速和方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=4.轮6的转速可以用传动比公式i=n1/n6求得,代入n1=1200r/min和i=4计算得到n6=300r/min。
轮6的方向可以根据蜗杆的旋转方向和箭头来确定。
(完整版)第三单元测试题(轮系)答案
第三单元测试题(轮系) 班级 姓名 学号一、 单项选择题1 轮系的下列功用中,哪一功能必须依靠行星轮系实现( D )。
A 实现变速传动B 实现大的传动比C 实现分路传动D 实现运动的合成和分解2 定轴轮系有下列情况:(1)所有齿轮轴线平行; (2)首末两轮轴线平行;(3)首末两轮轴线不平行; (4)所有齿轮轴线都不平行。
其中有多少种情况的传动比冠以正负号( B )。
A 1种B 2 种C 3种D 4种3 定轴轮系有下列情况:(1)所有齿轮轴线都不平行;(2)所有齿轮轴线平行;(3)首末两轮轴线平行;(4)所有齿轮之间都是外啮合;(5)所有齿轮都是圆柱齿轮。
其中有多少种适用(-1)m 法(m 为外啮合次数)决定传动比的正负号(A )A 1种B 2 种C 3种D 4种4 某人总结惰轮在轮系中的作用如下:(1)改变从动轮转向;(2)改变从动轮转速;(3)调节轮轴间距;(4)提高齿轮强度。
其中有多少条是正确的(B )。
A 1条B 2条C 3条D 4条5 行星轮系转化轮系传动比HB H A H AB n n n n i --=若为负值,则齿轮A 与齿轮B 的转向(C ) A 一定相同 B 一定相反 C 不一定D 与传动比正负无关二、计算题。
所示,(按定轴轮系计算好了)解: (1) 划分轮系1-2-2’-3-A(H)构成一周转轮系3’-4-4’-5-A(H)构成一周转轮系(2) 分别计算各分轮系的传动比 ( 注意正负号). 1-2-2’-3-A(H)构成的周转轮系: 334)()('2132313113-=-=--==z z z z n n n n n n i H H H H H (1) 3’-4-4’-5-A(H)构成的周转轮系3433)()('4'3545'35'35'3-=-=--==z z z z n n n n n n i H H H H H(2) (3) 联立求解n 5=0 , n H =n A , n 3=n 3’式(1)乘以式(2)即可计算出结果.n A =-150r/min, 转向与n 1方向相反.3 如图所示轮系中,设已知各轮齿数z 1=25,z 2=20,z 3=65,z 4=60,z 5=20,z 6=20,试求传动比i 14。
机械原理题目---轮系
机械原理题⽬---轮系第六章轮系及其设计计算及分析题1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。
2、图⽰轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动⽐i 15。
3、在图⽰轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动⽐i 1H ,并说明I 、H 轴的转向是否相同?4、在图⽰轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动⽐i 1 H ,并说明H 的转向是否和齿轮1相同?I’5、在图⽰轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动⽐i 15。
6、在图⽰轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动⽐i 1H 。
7、在图⽰轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z3’= 20,Z 4=75,试求:(1)轮系的传动⽐i 1H 。
(2)若n 1=1000r/min ,转臂H 的转速n H =?8、已知图⽰轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。
试求轮3的转速n 3 的9、在图⽰轮系中,已知各轮齿数为Z1= Z3= Z4=20,Z2=40,Z5= 60,n1 = 800r/min,⽅向如图所⽰,试求n H的⼤⼩及转向。
10、在图⽰轮系中,已知各轮齿数为Z1=16 ,Z2=24,Z2’= 20,Z3=40,Z3’= 30,Z4= 20,Z5=70试求轮系的传动⽐i1H。
11、在图⽰轮系中,已知各轮齿数为Z1= 15,Z2=25,Z2’= 20,Z3=60,Z4=10,Z5=30,n1=200r/min,n3=50r/min,试求n1、n3转向相反时,n5=?。
(完整版)轮系试题
轮系一、判断题(正确T,错误F)1.定轴轮系是指各个齿轮的轴是固定不动的。
()2.单一周转轮系具有一个转臂。
()3.单一周转轮系中心轮和转臂的轴线必须重合。
()4.周转轮系中的两个中心轮都是运动的。
()5.转化轮系的传动比可用定轴轮系求解,因此转化轮系中igj=ngnj的数值为有齿轮g到j间所有从动轮齿数相乘积与所有主动轮齿数相乘积的比值。
()6.行星轮系和差动轮系的自由度分别为1和2,所以只有差动轮系才能实现运动的合成或分解。
()二、单项选择题1.行星轮系的自由度为()。
A 1B 2C 3D 1或22.()轮系中必须有一个中心轮是固定不动的。
A定轴B周转C行星D差动3.()轮系中两个中心轮都是运动的。
A定轴B周转C行星D差动4.()轮系不能用转化轮系传动比公式求解。
A定轴B混合C行星D差动5.每个单一周转轮系具有()个转臂。
A 0B 1C 2D 36.每个单一周转轮系中心轮的数目应为()。
A 3B 2C 1D 1或27.每个单一周转轮系中,转臂与中心轮的几何轴线必须()。
A交错B相交C重合D平行8.两轴之间要求多级变速传动,选用()轮系合适。
A定轴B行星C差动 D B和C9.三轴之间要求实现运动的合成或分解,应选用()。
A定轴轮系B行星轮系C差动轮系 D A和B三、填空题1.轮系的主要功用是、、、。
2.定轴轮系是指。
3.周转轮系是指。
4.求解混合轮系的传动比,首先必须正确地把混合轮系划分为和各个,并分别列出它们的计算公式,找出其相互联系,然后。
四、计算题=900r/m in,z2=60,z2'=25,z3=20,z 3'=25,z4=20,z4'=30,z5=35,z5'=28,z6=135,求n6的大小和方向。
2.图示轮系中,已知z1=60,z2=48,z2'=80,z3=120,z3'=60,z4=40,蜗杆z4'=2,1.在图示轮系中,设已知双头右旋蜗杆的转速n 1(右旋),蜗轮z5=80,齿轮z5'=65,模数m=5mm。
第六章 轮系测试题
第六章轮系测试题姓名分数一、单项选择题1、若齿轮与轴各自转动、互不影响则齿轮与轴的关系是( )。
A.空套B.固定C.滑移2、齿轮与轴之间滑移是指齿轮与轴周向固定、齿轮可沿( )。
A.周向滑移B.轴向滑移C.周向与轴向滑移3、在机械传动中为了获得较大的传动比可采用的传动是( )。
A.齿轮B.蜗杆C.轮系4、在机械传动中将主动轴的一种转速变换为从动轴的多种转速或需要改变从动轴的回转方向采用的传动是( )。
A.齿轮B.蜗杆C.轮系5、轮系运转时所有齿轮的几何轴线位置相对于机架固定不变的轮系是( )。
A.定轴轮系B.周转轮系C.混合轮系6、轮系运转时至少有一个齿轮的几何轴线相对于机架的位置是不固定的、而是绕另一个齿轮的几何轴线转动的轮系是( )。
A.定轴轮系B.周转轮系 C . 混合轮系7、齿轮在轴上的固定方式有几种( )。
A.2B.3C.48、齿轮与轴之间固定即齿轮与轴一同转动也不能沿轴向移动的固定方式称为( )。
A.固定B.空套C.滑移9、齿轮与轴滑移是指齿轮可沿轴向方向移动、在周向的方向是齿轮与轴( )。
A.固定B.空套C.滑移10、齿轮与轴一同转动、但齿轮可沿轴向滑移的固定方式称为( )。
A.固定B.空套C.滑移11、可以作较远距离传动的机构是( )。
A.齿轮B.轮系C.蜗杆12、一对外啮合的齿轮传动中、两轮的旋转方向( )。
A.相同B.相反C.没关系13、一对内啮合的齿轮传动中、两轮的旋转方向( )。
A.相同B.相反C.没关系14、利用中间齿轮可以改变从动齿轮的( )。
A.速度B.转向C.大小15、在轮系中各齿轮轴线互相平行时、若外啮合齿轮的对数是偶数则首轮与末轮的转向( )。
A.相同B.相反C.没关系16、在轮系中对总传动比毫无影响但起到改变齿轮副中从动轮回转方向作用的齿轮被称为( )。
A.主动轮B.从动轮C.惰轮17、定轴轮系传动比大小与轮系中惰轮的齿数( )。
A.无关B.成正比C.成反比18、若主动轴转速为1200r/min、若要求从动轴获得12r/min的转速应采用的传动是( )。
7-5-1 《轮系》练习题(一)
☼7-5-1《轮系》练习题(一)☼班级姓名学号一、填空题:1、平面定轴轮系传动比的大小等于;从动轮的回转方向可用方法来确定。
2、所谓定轴轮系是指。
3、所谓周转轮系是指。
4、蜗轮的转向不仅与的转向有关,而且与其方向有关。
5、在轮系的传动中,有一种不影响传动比大小,只起改变转向作用的齿轮,我们把它称为。
6、差动轮系的自由度是,行星轮系的自由度是。
在周转轮系中,轴线固定的齿轮称为;兼有自转和公转的齿轮称为。
7、基本周转轮系是由、、组成。
8、在复合轮系传动比计算中,应正确区分各个轮系,其关键在于。
9、在周转轮系传动比计算中,运用相对运动的原理,将周转轮系转化成假想的定轴轮系方法称为。
10、汽车后桥差速器是作分解运动的应用。
二、选择题:1、轮系可以分为()两种类型。
A、定轴轮系和差动轮系B、差动轮系和行星轮系C、定轴轮系和复合轮系D、定轴轮系和周转轮系2、差动轮系的自由度为()。
A、1B、2C、3D、43、行星轮系的自由度为()。
A、1B、2C、3D、44、在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数=()。
值计算的一般公式是i1nA、轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B、轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C、轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D、轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积A 、i H mn =(n m —n H )/(n n —n H )B 、i H mn =(n n —n H )/(n m —n H )C 、i Hmn =(n H —n n )/(n m —n n ) D 、i Hmn =(n m —n n )/(n n —n H ) 6、基本周转轮系是由( )构成。
A 、行星轮和中心轮B 、行星轮、惰轮和中心轮C 、行星轮、行星架和中心轮D 、行星轮、惰轮和行星架 7、下列四项功能中,哪几项( )可以通过轮系的运用得以实现。
轮系练习题
第5单元轮系一、单项选择题。
(本大题共20小题,每题2分,共40分)1.由一系列相互啮合的齿轮组成的传动系统称()。
A.轮系B.轮群C.轮合D.轮组2.下列关于轮系说法正确的是()。
A.可以实现运动的合成但不能分解运动B.不适宜作较远距离的传动C.不能获得较大的传动比D.可以实现变向和变速要求。
3.定轴轮系的传动比大小与惰轮的齿数()。
A.有关B.无关C.成正比D.成反比4.定轴轮系中适用(—1)m(m为外啮合次数)决定传动比的正负号的情况是( )。
A.所有齿轮轴线都不平行B.所有齿轮轴线都平行C.首末两轮轴线平行D.所有齿轮都是圆柱齿轮5.定轴轮系中各齿轮的几何轴线位置都是()。
A.固定的B.活动的C.相交的D.交错的6.在由一对外啮合直齿圆柱齿轮组成的传动中,若增加()个惰轮,则使其主、从动轮的转向相反。
A.偶数B.奇数C.二者都是D.二者都不是7.定轴轮系的传动比等于所有()齿数的连乘积与所有主动轮齿数的连乘积之比。
A.从动轮B.主动轮C.惰轮D.齿轮8.定轴轮系的总传动比等于各级传动比()。
A.之和B.连乘积C.之差D.平方和9.惰轮在轮系中,不影响传动比大小,只影响从动轮()。
A.旋转方向B.转速C.传动比D.齿数10.轮系的末端是螺旋传动,已知末端轴转速n=80r/min,三线螺杆的螺距为4mm,则螺母每分钟移动距离为( )mm。
A.240B.320C.960D.120011.用画箭头标注轮系旋转方向的不正确画法是( )。
A.一对外啮合圆柱齿轮箭头方向相反,内啮合箭头方向相同B.同一轴上齿轮箭头画的相反C.圆锥齿轮箭头画相对或相背同一点D.蜗杆传动时,蜗轮转向用左右手定则判别,画出箭头方向12.图示三星轮换向机构中,1为主动轮,4为从动轮,图示传动位置()。
A.一个惰轮,主、从动轮回转方向相反B.一个惰轮,主、从动轮回转方向相同C.两个惰轮,主、从动轮回转方向相同D.两个惰轮,主、从动轮回转方向相反13.一轮系有3对齿轮参加传动,经传动后,则输入轴与输出轴的旋转方向( )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮系一、判断题(正确 T ,错误 F )1. 定轴轮系是指各个齿轮的轴是固定不动的。
( )2. 单一周转轮系具有一个转臂。
( )3. 单一周转轮系中心轮和转臂的轴线必须重合。
( )4. 周转轮系中的两个中心轮都是运动的。
( )5. 转化轮系的传动比可用定轴轮系求解,因此转化轮系中j g gj n n i =的数值为有齿轮g 到j 间所有 从动轮齿数相乘积与所有主动轮齿数相乘积的比值。
( )6. 行星轮系和差动轮系的自由度分别为1和2,所以只有差动轮系才能实现运动的合成或分解。
( )二、单项选择题1. 行星轮系的自由度为( )。
A 1B 2C 3D 1或22. ( )轮系中必须有一个中心轮是固定不动的。
A 定轴B 周转C 行星D 差动3. ( )轮系中两个中心轮都是运动的。
A 定轴B 周转C 行星D 差动4. ( )轮系不能用转化轮系传动比公式求解。
A 定轴B 混合C 行星D 差动5. 每个单一周转轮系具有( )个转臂。
A 0B 1C 2D 36. 每个单一周转轮系中心轮的数目应为( )。
A 3B 2C 1D 1或27. 每个单一周转轮系中,转臂与中心轮的几何轴线必须( )。
A 交错B 相交C 重合D 平行8. 两轴之间要求多级变速传动,选用( )轮系合适。
A 定轴B 行星C 差动D B 和C9. 三轴之间要求实现运动的合成或分解,应选用( )。
A 定轴轮系B 行星轮系C 差动轮系D A 和B三、填空题1. 轮系的主要功用是 、 、 、 。
2. 定轴轮系是指 。
3. 周转轮系是指 。
4. 求解混合轮系的传动比,首先必须正确地把混合轮系划分为 和各 个 ,并分别列出它们的 计算公式,找出其相互联系, 然后 。
四、计算题1. 在图示轮系中,设已知双头右旋蜗杆的转速r/m in 9001=n ,602=z ,252='z ,203=z ,253='z ,204=z ,304='z ,355=z ,285='z ,1356=z ,求6n 的大小和方向。
2. 图示轮系中,已知601=z ,482=z ,802='z ,1203=z ,603='z ,404=z ,蜗杆24='z ,(右旋),蜗轮805=z ,齿轮655='z ,模数mm 5=m 。
主动轮1的转速r/m in 2401=n ,转向如图所示。
试求齿条6的移动速度6v 的大小和方向。
题 1 图 题 2 图3. 在图示的轮系中,已知205421====z z z z ,又齿轮1,3,4,6同轴线,且均为标准齿轮传动。
若已知齿轮1的转速r/m in 14401=n ,试求齿轮6的转速(大小和方向)。
4. 在图示的轮系中,已知201=z ,302=z ,153=z ,654=z ,r/m in1501=n ,求H n 的大小及方向。
题 3 图 题 4 图5. 在图示周转轮系中,已知各齿轮的齿数151=z ,252=z ,202='z ,603=z ,齿轮1的转速 r/m in 2001=n ,齿轮3的转速r/min 503=n ,其转向相反,求行星架H 的转速H n 的大小和方向。
6. 图示轮系中,已知601=z ,152=z ,202='z ,各轮模数均相同,求3z 及H i 1。
7. 图示轮系中,已知401=z ,202=z ,齿轮1的转速r/m in 1201=n ,求3z 及行星架的转速0=H n 时齿轮3的转速3n (大小及方向)。
题 5 图 题 6 图 题 7 图8. 求如图所示轮系的传动比14i ,已知2521=='z z ,2032==z z ,100=H z ,204=z 。
9. 在如图所示轮系中,各齿轮均为标准齿轮,并已知其齿数分别为,已知341=z ,222=z ,783=z ,184=z ,355=z ,886=z ,计算传动比21H i 。
10. 求图示卷扬机减速器的传动比H i 1。
若各轮的齿数为241=z ,482=z ,302='z ,603=z ,203='z ,404=z ,1004='z 。
题 8 图 题 9 图 题 10 图11. 在图示的轮系中,已知各轮的齿数21=z (右旋),602=z ,404=z ,205=z ,406=z ,齿轮3,4,5,6均为标准安装的标准齿轮,且各齿轮的模数相同。
当轮1以r/m in 9001=n 按图示方向转动时,求轮6转速6n 的大小和方向。
12. 在图示的轮系中,轴A 按图示方向以1250 r/min 的转速回转,而轴B 按图示方向以600 r/min 的转速回转。
试决定轴C 的转速大小和方向。
各轮齿数见图所示。
题 11 图 题 12 图参考答案一、判断题(正确 T ,错误 F )1. F2. T3. T4. F5. F6. T二、单项选择题1. A2. C3. D4. B5. B6. D7. D8. A9. C三、填空题1. 距离较远传动 变速与换向 获得大传动比 合成或分解运动2. 轮系传动时每个齿轮的轴线相对机架是固定的3. 轮系中至少有一个齿轮的几何轴线相对机架是不固定的4. 定轴轮系 单一周转轮系 传动比 联立求解四、计算题1. 解:该轮系为由圆柱齿轮、锥齿轮和蜗杆蜗轮组成的定轴轮系。
(1)10828302525213535202060654321654326116=⨯⨯⨯⨯⨯⨯⨯⨯=⋅⋅⋅⋅⋅⋅⋅=='''''z z z z z z z z z z z n n i(2)r/min 33.81089001616===i n n ,转向如图所示。
2. 解:该轮系为由圆柱齿轮、锥齿轮、蜗杆蜗轮和齿轮齿条组成的定轴轮系(1)322608060804012040432154325115=⨯⨯⨯⨯⨯⨯=⋅⋅⋅⋅⋅⋅=='''z z z z z z z z n n i(2)r/min 5.73224015155===='i n n n ,(3)齿条6的移动速度6v 等于齿轮5'分度圆线速度,所以mm/s 6.127605.7655606055556=⨯⨯⨯===''''πππn mz n d v齿条6的运动方向如图所示。
3. 解:该轮系为一个平行轴定轴轮系。
(1)4163542165325115z z z z z z z z z z z z n n i ⋅⋅=⋅⋅⋅⋅⋅⋅==(2)齿轮3和齿轮6的齿数可以从中心距相等的关系中求得。
由于齿轮1,2,3的模数相等,中心距间的关系为()()23212121z z m z z m -=+ 从而得到60202202213=⨯+=+=z z z 同理可得60202202546=⨯+=+=z z z(3)所以,r/min 160606020201440634115=⨯⨯⨯=⋅⋅⨯=z z z z n n ,转向如图所示。
4. 解:该轮系为行星轮系。
(1)()5.715206530111131421141=⨯⨯+=⋅⋅--=-=z z z z i i H H(2)r/min 205.715011===H H i n n 行星架H 的转向与齿轮1的转向相同。
5. 解:该轮系为差动轮系。
(1)52015602521323113-=⨯⨯-=⋅⋅-=--='z z z z n n n n i H H H ,则有 (2)()115n n n n H H -=-,所以, 6531n n n H +=(3)设齿轮1转速为正,则齿轮3转速为负,则有()r/min 33.865065052006531-=-=-⨯+=+=n n n H 行星架H 的转向与齿轮1的转向相反,而与齿轮3的转向相同。
6. 解:该轮系为一行星轮系。
(1)由同心条件得()()23212121'-=-z z m z z m 则有 651520602213=-+=-+='z z z z(2)163206065151112132131=⨯⨯-=⋅⋅-=-='z z z z i i H H齿轮1与行星架H 的转向相同。
7. 解:该轮系为一差动轮系。
(1)根据同心条件,轮1和轮2的中心距应等于轮3和轮2的中心距,对于标准齿轮,相啮合的齿轮模数相等,故2123r r r r +=-,2132r r r +=,则有2132121mz mz mz +=,80202402213=⨯+=+=z z z (2)当0=H n 时,即行星架H 固定,该轮系成为定轴轮系,24080133113-=-=-==z z n n i ,r/min 6021201313-=-==i n n 齿轮3的转向与齿轮1的转向相反。
8. 解:该轮系为一混合轮系。
(1)该轮系的齿轮1,2,2/,3和行星架H 组成行星轮系,其传动比为()25925252020111213221=⨯⨯-=⋅⋅--='z z z z i H (2)由齿轮4和行星架H 组成定轴轮系,其传动比为5110020444-=-=-==H H H z z n n i (3)125951259414114-=⎪⎭⎫ ⎝⎛-⨯=⋅==H H i i n n i 齿轮1与齿轮4的转向相反。
9. 解:该轮系为一混合轮系。
(1)由齿轮1,2,3和行星架H 组成行星轮系,其传动比为()25925252020111213221=⨯⨯-=⋅⋅--='z z z z i H (2)由齿轮4和行星架H 组成定轴轮系,其传动比为5110020444-=-=-==H H H z z n n i (3)125951259414114-=⎪⎭⎫ ⎝⎛-⨯=⋅==H H i i n n i 齿轮1与齿轮4的转向相反。
10. 解:该轮系为一混合轮系。
(1)由齿轮3/、4、4/组成定轴轮系,其传动比为5201003434343-=-=-===''''''z z n n n n i H 得H n n 53-= (2)由齿轮1,2,2/,3和行星架H 组成差动轮系,其传动比为 430246048214243113-=⨯⨯-=⋅⋅-=--='z z z z n n n n i H H 得 ()314n n n n H H -=-(3)联立求解H H n n n n 254531=-=,所以 2511==HH n n i 齿轮1与卷扬机的转向相同。
11. 解:该轮系为一混合轮系(1)齿轮1,2组成定轴轮系,其传动比为30260122112====z z n n i ,r/min 30309001212===i n n ,方向如图所示。