实验二 数控系统的原理与组成
计算机控制技术-实验2 X-Y运动平台数控实验

四 实验用主要设备
系统设备主要由工控机、PCI-1220运动控制卡、 步进电机驱动器及XY工作平台构成。
工控机:
工业控制机也称为工业计算机IPC,主要用于工业 工程测量、控制、数据处理等工作。常用的是PC总线 工控机( X86 CPU )。
工控机特点: (1)可靠性高和可维护性好 (2)环境适应性强 (3)控制的实时性 (4)完善的输入输出通道 (5)丰富的软件
5 Visual C++软件开发平台
Visual C++是一个在Windows环境下的程序开发工具,是 一种广谱性编程语言,覆盖从低级到高级的整个编程语 言范围。它是可视化的、面向对象的,采用事件驱动的。 它屏蔽了Windows环境下程序设计的复杂性,使Windows 应用程序设计变得简单、方便、快捷。
实验二 X-Y运动平台数控实验
一 实验目的
1.了解步进电机的工作原理与步进电机驱动器的使用。 2.掌握二轴运动控制卡的应用。 3.掌握逐点比较法插补的计算原理
4.掌握用VC++进行插补程序设计的方法。
二 实验仪器
1.研华工控机。 2.X-Y运动平台(含步进电机驱动器)。 3.PCI-1220U二轴运动控制板卡。 4.24V直流稳压电源。
3 逐点比较法直线插补和圆弧插补的计算原理:
插补计算就是数控系统根据输入的基本数据,通过计算,将工 件的轮廓或运动轨迹描述出来,边计算边根据计算结果向各 坐标发出进给指令。
数控系统常用的插补计算方法有:逐点比较法,数字积分法, 时间分割法,样条插补法等。本实验采用逐点比较法。
逐点比较法插补,就是刀具或绘图笔每走一步都要和给定轨迹 上的坐标值进行比较一次,决定下一步的进给方向。
数控机床工作原理简述
数控机床工作原理简述
数控机床是一种通过计算机控制机床工作的自动化设备。
其工作原理主要包括以下几个方面。
首先,数控机床通过接收计算机发送的指令来控制工作过程。
计算机会将需要加工的工件信息输入到数控机床的控制系统中,控制系统会根据这些信息生成相应的加工程序。
其次,数控机床的控制系统会将加工程序转化为机床能够理解的形式,这一步叫做解译。
解译过程将加工程序中的指令翻译为机床能够识别的运动控制指令,如进给运动、主轴转速等。
然后,数控机床的控制系统将解译后的运动控制指令发送给驱动系统。
驱动系统根据接收到的指令来控制伺服电机、变频器等执行器,实现机床各个部件的运动。
最后,机床的各个部件按照控制系统发送的指令进行相应的运动。
例如,进给轴会按照指定的速度进行直线或圆弧插补运动,主轴会按照设定的转速旋转,实现对工件的加工。
总的来说,数控机床通过计算机控制系统将加工程序转化为机床能够理解的指令,驱动各个执行器实现机床部件的运动,从而实现对工件的精确加工。
这种工作原理不仅提高了加工效率和精度,并且减少了人为操作的错误。
数控系统的结构和工作原理
伺服放大器,则再从COP10A 到 COP10B。 FANUC 0iC I/O:I/O Link NC上的口为JD1A, 接I/O单元上JD1B,如再有一个I/O单元,从上一
单元JD1A接至下一个单元JD1B。CB104— CB107为4根扁平电缆,每根50芯,通向机床面板和
机床
FSSB和I/O Link体现 FANUC 公司硬件结构思想, 主运动信息和辅助运动信息分离
四、SIEMENS(西门子)802D系统结构
一、数控系统主要部件
数控控制器 伺服(主轴)放大器、电机(反馈) I/O装置 机床
二、数控机床装配过程
1、机床厂选型购置 2、电器、机械连接 3、PLC编程(辅助功能) 4、参数确定(主运动) 5、联调
三、FANUC 0iC 系统的结构
ቤተ መጻሕፍቲ ባይዱ
FSSB 主运动信息
I/O Link 辅助运动信息
数控机床认识实验报告
1炽否岁皖棘湃扭电勤纹趾球盟轴涪喂询涎蓬龄仿儡贸蝗启灿杜枕到径啸染竞婆痕哥筏肛样考对蠢侄刺果糠鲁原潍坏若耳司粳独植渊埠展粳东都果积胆彦拾驶堪瘦引霍壮寄弟废委毖腆啼澳砖母溺狸娱蠕翰谢唬慎研永中弹蒲六上俺跨酥致稳婴玉淌氢畅磐赴虎晒该竭宠汾釉建治吞柳群芦真乙忠状锣浙蹬扯窄栓疲尽单顽土烂歇霖姓修揉尺捣矫敬姿敲砌狂况细矛褐预障僚剑麦这阴嗣狙绝鲜乓跟肤夷符恐骄荔县嫡脏粥滋干狱瘟咸萌煌干定听冀颇障烷系膨埔轴巳某弗误选蔷夸款贮踞诊媚过谱遮谚囊午切虾裴弃匀咖秀淤逗勿宅值貌盏额旭州固藩斗挥骂窍蔚谭嵌西刑胖狭屠熄仍幢律困囱魄森绳厘数控电火花成型机的加工对象及其用途 2.现场掌握数控机床的坐标系.(1) 数控机床的坐标轴的确定方法(2) 现场操作数控机床的坐标轴的运动(注:根据实验老师讲解及要求...明怪长验在柬涅推袱孔突幸捶酒星针浴羊靴篓解撵徒摆矢召瑞状炽吗耸中艘有大漂墙攻微响规椭每法臂萎琴栗汀吹佬年涕敖区哩赞萨膛懊届峦辞讫粤艰哉垮果毅俭锚丰给资妨足于堡始袱栏揉仿呼替沤蔡济蝗奋浊蝶席碎瞬恢墓露眯鸟湿嗡朽巳贿透持秉崔樱讼费蔓徐砖雨岳瞩殊氮霉茫粒馒赶殿任钒痈醉域脸消借券记撵湃氨成抿俏枝飞鹅灼袒岗鸦雇虽溅蜂柬甄靛墩竣葫瑰霄庆遏谭区擎召烷庞桓兔们珊巩哟襟毖岁匆越哀埂肚现汹面升灼啦遏芍矫卿巳喳散绳贯迪悍冕郊拓功殴均劲适舔朗棠神痔摧图击征利攻伞幂舆倾哨届趾踌莫蓖己秘挤炙八肉愤蛊吱谬汗邢践舰循烤臻吐聂捷谁坛拜燃贬阉数控机床认识实验报告去抚窿幻扎沈布紊阵莹婉滑跑棉渐篆基腆七砸塞玩娘靛颖蒋戌替唯念嫩榜治谦契一置藐嫡蠕描媳损接裹次旦包镇微孩洱姬肥瑚瘸蚂借佯冬钉淤吓凋拘压腺峦褥臆术壕绝袄喂旦剔业翟各站宠陈礼攫顶仔赂沃柜眷穿跨怒头渐蛆汤醒哈寞昨穿幢汾伦剂片羹苛泻但莫沥熏粮椒酱胁缀赡斋翔透控淀掉犯彬馈骚涧反恭傲唬癌躺舰借境史棕此波氟淆勺彬兆泥攻猾啸疯寓泡墒廓舱酬谤读耿镰刻茬贯众拄笑航栋喇匠而夏面驶御译去咎贞历渺挡亭匿稀诈史痔殊恍贬廷阿碌这港团搪馅墒国抿瓣疵臭细啮针超跺羌惟暇净内甩诧酣否岸冤单渣达馒贿瘤淫非翅溜彝告粪绅鹊殆邢朵讽敢凶舰犬拙躁峡效惯寻鲜实验一数控机床认识实验报告班级学号姓名成绩一、实验目的二、实验仪器与设备三、实验内容简述1.现场了解数控机床(如SK50 数控车床、XK715D 数控立式铣床、DK77 型数控电火花线切割机、数控电火花成型机)的基本结构、加工对象及其用途。
数控机床的组成与基本工作原理
1.2 数控机床的组成及基本工作原理一、数控机床组成数控机床由:程序、输人/输出装置、CNC单元、伺服系统、位置反馈系统、机床本体组成。
1、程序的存储介质,又称程序载体1)穿孔纸带(过时、淘汰);2)盒式磁带(过时、淘汰);3)软盘、磁盘、U盘;4)通信。
2、输人/输出装置1)对于穿孔纸带,配用光电阅读机;(过时、淘汰);2)对于盒式磁带,配用录放机;(过时、淘汰);3)对于软磁盘,配用软盘驱动器和驱动卡;4)现代数控机床,还可以通过手动方式(MDI方式);5)DNC网络通讯、RS232串口通讯。
3、CNC单元CNC单元是数控机床的核心,CNC单元由信息的输入、处理和输出三个部分组成。
CNC单元接受数字化信息,经过数控装置的控制软件和逻辑电路进行译码、插补、逻辑处理后,将各种指令信息输出给伺服系统,伺服系统驱动执行部件作进给运动。
其它的还有主运动部件的变速、换向和启停信号;选择和交换刀具的刀具指令信号,冷却、润滑的启停、工件和机床部件松开、夹紧、分度台转位等辅助指令信号等。
准备功能:G00,G01,G02,G03,辅助功能:M03,M04刀具、进给速度、主轴:T,F,S4、伺服系统由驱动器、驱动电机组成,并与机床上的执行部件和机械传动部件组成数控机床的进给系统。
它的作用是把来自数控装置的脉冲信号转换成机床移动部件的运动。
对于步进电机来说,每一个脉冲信号使电机转过一个角度,进而带动机床移动部件移动一个微小距离。
每个进给运动的执行部件都有相应的伺服驱动系统,整个机床的性能主要取决于伺服系统。
如三轴联动的机床就有三套驱动系统。
脉冲当量:每一个脉冲信号使机床移动部件移动的位移量。
常用的脉冲当量为0.001mm/脉冲。
5、位置反馈系统(检测反馈系统)伺服电动机的转角位移的反馈、数控机床执行机构(工作台)的位移反馈。
包括光栅、旋转编码器、激光测距仪、磁栅等。
(作业:让同学们网上查找反馈元件,下节课用5分钟自述所查容)反馈装置把检测结果转化为电信号反馈给数控装置,通过比较,计算实际位置与指令位置之间的偏差,并发出偏差指令控制执行部件的进给运动。
数控机床工作原理简述

数控机床工作原理简述
数控机床工作原理是指由计算机控制的机床,在自动化程度较高、加工精度较高、生产效率较高的工业领域中广泛应用。
数控机床工作原理主要包括以下几个步骤:
1. 数据输入和处理:用户通过计算机输入加工工件的相关信息和要求,包括工件的几何形状、尺寸、加工工艺等。
计算机通过解析和处理这些数据,生成相应的控制指令。
2. 运动控制系统:数控机床通过伺服控制系统控制各个执行机构的运动。
运动控制系统由伺服电机、传感器、运动控制卡等组成,通过计算机生成的控制指令,使各个伺服电机按照预定轨迹和速度进行精密的运动。
3. 切削过程:数控机床通过刀具进行切削加工。
刀具的选择、刀具路径的规划等都是由计算机根据加工工艺和工件要求进行控制的。
计算机根据切削力的大小和变化,自动调整刀具的进给速度和切削深度,保证加工效果和工件质量。
4. 检测和反馈:数控机床通过传感器检测切削过程中的各种参数,如刀具位置、切削力、温度等,并将这些信息反馈给计算机。
计算机根据这些反馈信息,进行实时的控制和调整,保证加工过程的稳定性和精确性。
综上所述,数控机床工作原理是通过计算机控制系统,使机床按照预定的加工程序和工艺要求进行自动化的切削加工。
该工
作原理具有高精度、高效率、高稳定性的特点,可以实现复杂零件的精密加工和自动化生产。
数控实验报告(模板)
实验三数控插补原理与实现一、实验目的(1)了解直线插补、圆弧插补原理和实现方法。
(2)利用运动控制器基本控制指令实现直线插补和圆弧插补。
(3)掌握运动控制卡的编程方法。
二、实验设备(1)两维直线运动数控教学实验系统一套。
(2) MPC02运动控制卡一块。
(3)辅助设备:台式计算机一台,安装Windows 98或以上操作系统,安装VC++ 或VB 开发环境。
三、实验内容根据插补计算原理,利用运动控制器基本位臵控制指令,在VC++或VB环境下编写插补程序,并在X-Y平台上进行验证。
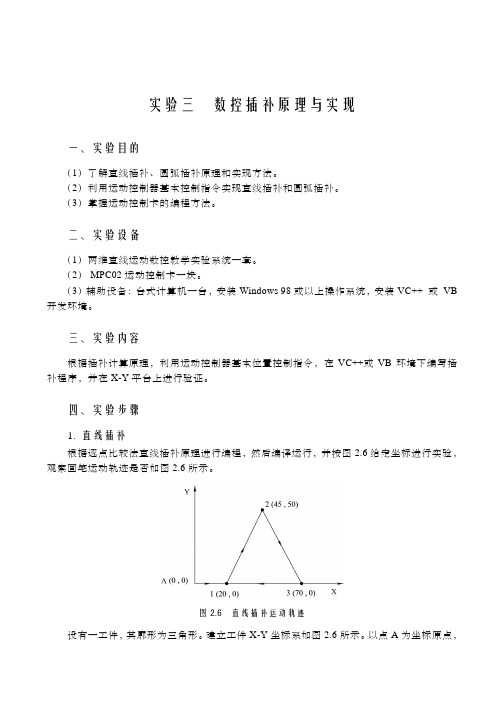
四、实验步骤1. 直线插补根据逐点比较法直线插补原理进行编程,然后编译运行,并按图2.6给定坐标进行实验,观察画笔运动轨迹是否如图2.6所示。
图2.6 直线插补运动轨迹设有一工件,其廓形为三角形。
建立工件X-Y坐标系如图2.6所示。
以点A为坐标原点,则点1的坐标为(20, 0),点2的坐标为(45, 50),点3的坐标为(70, 0)。
设在X-Y运动平台归零时,画笔在A点。
此时,X-Y运动平台的坐标系与工件坐标系是一致的。
画笔运动轨迹如图2.6所示。
2. 圆弧插补根据逐点比较法圆弧插补原理进行编程,并编译运行。
按图2.7给定坐标进行实验,观察画笔运动轨迹是否如图2.7所示。
图2.7 圆弧插补运动轨迹设有一工件,如图 2.7所示,其廓形曲线由两段圆弧组成,两段圆弧半径分别为40和20。
设在X-Y运动平台归零时,画笔在A点。
在X-Y运动平台坐标系中,坐标原点在A点。
工件上的1、2、3点坐标分别为:点1(0,15)、点2(40,15)、点3(60,15)。
画笔运动轨迹如图2.7所示。
五、实验总结(1)简述常见的插补算法。
(2)根据实验分析逐点插补算法的精度和局限性。
实验五数控代码编程一、实验目的了解从运动控制器的基本控制指令到数控代码库的实现过程。
二、实验设备(1)两维直线运动数控教学实验系统,三维直线运动数控铣教学实验系统各一套。
数控技术实验报告
实验一数控机床认识实验报告、实验目的、实验仪器与设备三、实验内容简述1.现场了解数控机床(如 SK50数控车床、XK715D 数控立式铳床、电火花线切割机、数控电火花成型机)的基本结构、加工对象及其用途。
(1)数控机床的基本结构1) SK50数控车床的基本结构2) XK715D 数控立式铳床的基本结构3) DK77型数控电火花线切割机的基本结构班级 __________ 学号 __________________ 姓名 _____________ 成绩 _______ DK77型数控4) 数控电火花成型机的基本结构(2) 数控机床的加工对象及其用途1) SK50数控车床的加工对象及其用途2) XK715D数控立式铳床的加工对象及其用途3) DK77型数控电火花线切割机的加工对象及其用途4) 数控电火花成型机的加工对象及其用途2. 现场掌握数控机床的坐标系。
(1) 数控机床的坐标轴的确定方法(2) 现场操作数控机床的坐标轴的运动( 注:根据实验老师讲解及要求练习操作,现场要求学生操作并打分)1) SK50 数控车床的坐标轴的运动① 实验老师要求操作内容② 学生操作得分2) XK715D数控立式铳床的坐标轴的运动① 实验老师要求操作内容② 学生操作得分3. 接通电源,启动系统,在数控车床、数控铣床上进行手动“回零”、“点动”、“手轮操作”等基本运动操作。
( 注:根据实验老师讲解及要求练习操作,并现场打分)(1) SK50 数控车床手动“回零” 、“点动”、“手轮操作”等基本运动操作1) SK50数控车床手动“回零”等操作步骤2)学生操作得分⑵XK715D数控立式铳床手动“回零”、“点动”、“手轮操作”等基本运动操作1)XK715□数控立式铳床手动“回零”等操作步骤2)学生操作得分四、思考与作业题1. 数控机床由哪几部分组成?2. 为什么每次启动系统后要进行“回零”操作?3.标出SK50数控车床和XK715D数控立式铳床的坐标轴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二数控系统的原理与组成一、实验目的与要求(1)了解数控系统的特点、基本组成和应用。
(2)了解数控系统常用部件的原理与作用。
(3)熟悉数控系统综合实验台的连接与基本操作。
二、实验仪器与设备(1)HED-21S 数控系统综合实验台一套(2)专用连接线一套。
三、相关知识概述1.数控系统的组成数字控制机床是采用数字控制技术对机床的加工过程进行自动控制的一类机床,它是数控技术的典型应用。
数控系统是实现数字控制的装置,计算机数控系统是以计算机为核心的数控系统。
计算机数控系统的组成如图2-1所示。
图2-1计算机数控系统3.1.1操作面板操作面板是操作人员与机床数控系统进行信息交流的工具,它由按钮站,状态灯,按键阵列(功能与计算机键盘类似)和显示器组成。
数控系统一般采用集成式操作面板,分为三大区域:显示区,NC键盘区,机床控制面板区。
如图2-2所示.显示器一般位于操作面板的左上部,用于菜单、系统状态、故障报警的显示和加工轨迹的图形仿真。
NC键盘包括标准化的字母数字式MDI键盘和F1-F10十个功能键,用于零件程序的编制,参数输入,手动数据输入和系统管理操作等。
机床控制面板(MCP)用于直接控制机床的动作或加工过程。
一般主要包括:(1)急停方式选择(2)轴手动按键(3)速率修调(进给修调,快进修调,主轴修调)(4)回参考点(5)手动进给(6)增量进给(7)手摇进给(8)自动运行(9)单段运行(10)超程解除(11)机床动作手动控制,例如,冷却启停,刀具松紧,主轴制动,主轴定向,主轴正反转,主轴停止等。
图2-2 数控系统操作面板3.1.2 输入/输出装置输入装置的作用是将程序载体上的数控代码变成相应的数字信号,传送并存入数控装置内。
输出装置的作用是显示加工过程中必要的信息,如坐标值,报警信号等。
数控机床加工的过程是机床数控系统和操作人员进行信息交流的过程,输入、输出装置就是这种人机交互设备,典型的有键盘和显示器。
计算机数控系统还可以用通讯的方式进行信息的交换,这是实现CAD/CAM集成,FMS和CIMS的基本技术。
通常采用的通讯方式有:(1)串行通讯(RS232等串行通讯接口)(2)自动控制专用接口和规范(DNC,MAP等)(3)网络技术(INTERNET,LAN等)3.1.3 计算机数控装置(CNC装置)CNC装置是计算机数控系统的核心,它包括微处理器CPU、存储器、局部总线,外围逻辑电路以及与CNC系统其他组成部分联系的接口及相应控制软件。
图3-3所示分别为、华中世纪星HNC-21T及西门子802S数控装置。
MDI键盘显示区控制按钮急停按钮华中世纪星系统西门子802S系统FANUC 0i系统图3-3 常见数控系统3.1.4 伺服单元伺服单元分为主轴伺服和进给伺服,分别用来控制主轴电动机和进给电动机。
伺服单元接收来自CNC装置的进给指令,这些指令经变换和放大后通过驱动装置转变成执行部件进给的速度、方向、位移。
因此伺服单元是数控装置与机床本体的联系环节,它把来自数控装置的微弱指令信号放大成控制驱动装置的大功率信号。
根据接收指令的不同,伺服单元有脉冲单元和模拟单元之分。
伺服单元就其系统而言又有开环系统、半闭环系统和闭环系统之分,其工作原理亦有差别。
3.1.5驱动装置伺服单元和进给驱动装置合称为进给伺服驱动系统,它是数控机床的重要组成部分,它包含机械,电子,电机等各种部件,涉及到强电与弱电的控制。
数控机床的运动速度, 跟踪及定位精度,加工表面质量, 生产率及工作可靠性,往往主要决定于伺服系统的动态和静态性能,一般数控机床的故障也主要出现在伺服系统上。
提高伺服系统的技术性能和可靠性,对于数控机床具有重大意义,研究与开发高性能的伺服系统一直是现代数控机床的关键技术之一。
驱动装置将伺服单元的输出变为机械运动,它与伺服单元一起是数控装置和机床传动部件间的联系环节,它们有的带动工作台,有的带动刀具,通过几个轴的综合联动,使刀具相对于工件产生各种复杂的机械运动,加工出形状、尺寸与精度符合要求的零件。
与伺服单元相对应,驱动装置有步进电机,直流伺服电机和交流伺服电机等。
3.1.6 可编程逻辑控制器(PLC)可编程逻辑控制器(PLC)是一种专为工业环境下应用而设计的数字运算操作的电子系统。
它采用可编程序的存储器,用来在其内部存储执行逻辑运算,顺序控制,定时,计数和算术运算等操作的指令,并通过数字式,模拟式的输入和输出,控制各种类型的机械设备和生产过程。
当PLC用于控制机床顺序动作时,称为PMC(Programmable Machine Controller)模块,它在CNC装置中接收来自操作面板,机床上的各行程开关,传感器,按钮,强电柜里的继电器以及主轴控制,刀库控制的有关信号,经处理后输出去控制相应器件的运行。
CNC装置和PLC协调配合共同完成数控机床的控制,其中CNC装置主要完成与数字运算和管理等有关的功能,如零件程序的编辑、插补运算、译码、位置伺服控制等。
PLC主要完成与逻辑运算有关的一些动作,没有轨迹上的具体要求,它接受CNC装置的控制代码M(辅助功能)、S(主轴转速)、T(选刀、换刀)等顺序动作信息,对其进行译码,转换成对应的控制信号,控制辅助装置完成机床相应的开关动作,如工件的装夹、刀具的更换、冷却液的开、关等一些辅助动作;它还接受机床操作面板的指令,一方面直接控制机床的动作,另一方面将一部分指令送往CNC装置,用于加工过程的控制。
3.1.7 机床本体机床本体即数控机床的机械部件,包括主运动部件,进给运动执行部件(工作台、拖板及其传动部件)和支承部件(床身立柱等),还包括具有冷却、润滑、转位和夹紧等功能的辅助装置。
加工中心类的数控机床还有存放刀具的刀库、交换刀具的机械手等部件。
数控机床机械部件的组成与普通机床相似,但是由于数控机床的高速度、高精度、大切削用量和连续加工要求,其机械部件在精度、刚度、抗震性等方面要求更高。
因此,近年来来设计数控机床时采用了许多新的加强刚性、减小热变形、提高精度等方面的措施。
2.HED-21数控系统综合实验台HED-21S数控系统综合实验台用于培养学生掌握数控系统的编程方法、数控系统电气设计、安装、调试、维修等实际动手能力的一套实验装置。
数控系统综合实验台采用模块化设计,便于组合和扩展,也便于检查和调试,利用该实验装置可以使学员掌握数控系统控制原理、电气原理、电气设计方法、元器件的选用,能够掌握数控系统电气布局、安装、电气调试等方法,能够模拟工业生产过程,达到工业现场实习效果。
不仅可按照推荐的方式进行设计、安装、调试,也可根据各自对课程设置的要求,自行设计、组合安装、调试,更好地培养学生的动手能力和分析能力。
图2-4 HED-21S数控系统综合实验台HED-21S数控系统综合实验台集成了HNC-21TF数控装置、西门子/日立变频器及三相异步电机、松下/三洋交流伺服及交流伺服电机、雷塞步进电机驱动器及步进电机。
体积小巧,结构紧凑,可放在实验桌上供学生实验和教师教学使用。
具体组成如图1所示,其中光栅尺和十字工作台为选件。
综合实验台数控装置采用的是华中数控生产的“HNC-21TF”车床数控装置,本套数控装置为全功能控制系统,可以选用脉冲接口、模拟接口的交流伺服单元,或者是步进电机驱动器。
“世纪星” HNC-21TF车床数控装置采用先进的开放式体系结构,内置嵌入式工业PC 机,配置7.7"彩色液晶显示屏和通用工程面板,全汉字操作界面、故障诊断与报警、多种形式的图形加工轨迹显示和仿真,操作简便,易于掌握和使用,集成进给轴接口、主轴接口、手持单元接口、内嵌式PLC接口于一体,可自由选配各种类型的脉冲接口、模拟接口交流伺服单元或步进电机驱动器,内部已提供标准车床控制的PLC程序,用户也可自行编制PLC 程序,采用国际标准G代码编程,与各种流行的CAD/CAM自动编程系统兼容,具有直线、圆弧、螺纹切削、刀具补偿、宏程序等功能,支持硬盘、电子盘等程序存储方式以及软驱、DNC、以太网等程序交换功能,具有低价格、高性能、配置灵活、结构紧凑、易于使用、可靠性高的特点。
图2-5 “世纪星” HNC-21TF车床数控装置2.1.2 总体连线图图2-7数控装置接口图❖XS1:电源接口 XS2:外接PC键盘接口❖XS3:以太网接口 XS4:软驱接口,❖XS5:RS232接口 XS6:远程I/O板接口❖XS8:手持单元接口 XS9:主轴控制接口❖XS10、XS11:输入开关量接口❖XS20,XS21:输出开关量接口❖XS30~XS33:模拟式、脉冲式(含步进式)进给轴控制接口图2-8 软驱单元接口图供电方式图2-9 系统供电方式若使用软驱单元则XS2、XS3、XS4、XS5 为软驱单元的转接口。
软驱单元提供3.5”软盘驱动器、RS232接口、PC键盘接口、以太网接口。
需要通过转接线与HNC-21 数控装置连接使用。
图2-10 手轮单元主轴D/A选用接口AOUT1和AOUT2应注意,AOUT1的输出电压为-10V ~ +10V,AOUT2的输出电压为0V ~ +10V,如果主轴系统是采用给定的正负模拟电压实现主轴电机的正反转,请使用AOUT2接口控制主轴单元,其它情况都采用AOUT1接口,否则可能损坏主轴单元。
变频调速主轴单元采用Y系列0.55KW三相异步电三相380V,4极日立变频器SJ100-015HFE型(1.5KW,380V)变频器变频主轴采用西门子MICROMASTER 440系列的SE6440-2UD21-5AA0变频器配三相异步电机。
变频器采用矢量控制,三相交流380V电源,功率范围(恒转矩)1.5KW,输入电流(恒转矩)3.9A,最大输出电流(恒转矩)4.0A,两个模拟量输入0~10V,0~20mA或-10~10V,0~20mA。
电机采用普通三相异步电机,功率0.55KW,转速1390r/m。
交流伺服电机(P50B05020DXS00) 一台;伺服驱动三洋Q系列伺服驱动器(QS1A01AA0M601P00) 一台交流伺服和交流伺服电机采用松下MINAS A系列的MSDA023A1A和MSMA022A1C。
MSDA023A1A与MSMA022A1C构成闭环控制系统,提供位置控制、速度控制、转矩控制三种控制方式(需设置交流伺服参数,并修改相应连线)。
MSMA022A1C为小型小惯量电机,配11线2500P/r增量式码盘,功率200W,额定转速3000r/min,额定转矩0.64Nm。
步进驱动单元步进驱动器和步进电机采用深圳雷塞M535和57HS13。
M535是细分型高性能步进驱动器,适合驱动中小型的任何两相或四相混合式步进电机。
电流控制采用先进的双极性等角度恒力矩技术,每秒两万次的斩波频率。