平面近场天线测量误差分析
平面近场天线测量误差研究

平面近场天线测量误差研究作者:过梦旦来源:《科技与创新》2016年第03期摘要:近场测量技术是相关人员了解和深入掌握天线性能的重要途径,是较为先进的天线测量技术。
为了取得更好的测量效果,需要进一步提升天线测量的标准,改进和完善近场测量技术,从而有效减少误差。
以平面进场天线测量为例,结合近场测量技术的应用特点,探究了测量误差产生的原因,并提出了有效的解决措施,以提升近场天线测量的精度。
关键词:天线;测量误差;工作波长;数据信息中图分类号:TN820 文献标识码:A DOI:10.15913/ki.kjycx.2016.03.084天线测量技术是天线制造应行业用的关键技术之一。
在天线应用的多个领域中,对天线的精度和性能有很高的要求,尤其是在航空航天、通信等领域。
根据当前天线测试的要求,需要进一步改进和完善测试方法。
目前,天线的测试方法已从天线远场测量技术转换为近场测量技术,这极大地提升了天线测量的精度。
但近场测量技术同样存在一定的不足和缺陷,会受到多方面因素的影响,测量结果存在一定的误差。
1 平面近场天线测量技术的优势近场测量技术的基本原理是利用具有电特性的探头,在离开被测体3~5倍工作波长的距离中,按照取样定理对被测体进行取样分析,获得电磁场幅度和相位数据,经过FFT(快速傅立叶变换)数学变换后,以得出的数据信息为依据,从而更清晰地了解被测体的电特性。
根据被测体的类型,分为辐射近场测量、散射近场测量。
一般情况下,多采用散射近场测量,其中,平面近场天线测量技术的应用最为广泛。
与传统的天线测量技术相比,平面近场测量技术的优势更加明显。
比如,应用平面近场天线测量技术时,不需要投入过多的成本,且测量精度高、信息量大,通过对平面近场天线测量三维方向图的分析,可获得天线的精度、性能等相关信息数据;平面近场天线测量的操作更加简单、便捷,尤其是在测量大天线时不会受到远场尺寸的影响,且在室内也可采用近场检测,从而实现全天候工作;平面近场天线测量利用计算机自动控制完成,保密性良好。
天线平面近场测量的扫描面截断误差分析
su ytel td sa nn ln u c t n el r n se e t ntea tn a rdae atr y ma igu eo e td i e c n igp a et n ai lo d i f c ne n a itd p t nb kn s ft h mi r o ' a t o h e h
本项 目为国家 自然基金资助项 目( 编号 : 3 22 ) 6 300 。 0 本文于 2O O 6年 4月收到。王化深 : 副教授 ; 李娟 : 士研究 生。 硕
比较简单而受到了广泛的应用。
1 天 线 平 面 近 场 测 量 原 理
根据亥姆霍兹方程 雹 辐射场为… :
+∞ +∞
p t r sgv n Il rvd ssme te rt rosfrteelrc mp n a o ftea tn an a— ed me u — at n i ie .r i po ie o o i po f o l o e st n o h ne n e rf l a r e 1s h e c h o ' i i s e me tt h oo ,a d a e sme t ,s medrcie c n lso sa do rte pa t a aue n. n e n lg c y n t a i h t me o i t o cu in 】 rwn f rcil me rme t e v o h c s Ke wo d :a tn a rd ae atr y r s n e n a it p t n,pa a e rf l au e n ,erra ay i,u c r it. d e ln rn a- ed me rme t r n s i s o l s n et n a y
GNSS测量误差分析与修正方法

GNSS测量误差分析与修正方法GNSS(Global Navigation Satellite System)全球导航卫星系统是一种基于卫星定位技术的导航与定位系统。
在现代社会中,GNSS已经成为许多行业的重要工具,例如航空航天、交通运输、地质勘探以及城市规划等。
然而,在GNSS测量过程中,由于多种因素的影响,测量结果可能会受到一定的误差。
本文将对GNSS测量误差的产生原因进行分析,并探讨常见的修正方法。
首先,我们来了解一下GNSS测量误差的来源。
在GNSS测量过程中,有以下几个主要的误差源:1. 天线相位中心偏差:天线在接收信号时,由于设计和制造的原因可能存在相位中心偏差,导致测量结果产生误差。
2. 大气层延迟:卫星信号在穿过大气层时会发生折射,导致信号传播时间延长,从而引起位置定位误差。
3. 多径效应:卫星信号在传播过程中会受到地面和建筑物的反射,导致多个路径的信号同时到达接收器,使得接收到的信号出现多径效应,从而产生测量误差。
4. 时钟误差:测量过程中使用的时钟可能存在一定的偏差,导致定位结果出现误差。
5. 数据处理误差:在GNSS数据处理过程中,由于算法的近似和假设,可能会引入一定的误差。
针对以上误差源,研究人员提出了一系列的修正方法来减小测量误差。
下面将分别介绍这些方法。
1. 相位中心偏差的修正:可以通过对天线相位中心的测量和建模,对接收到的信号进行相应的修正。
这种方法可以在数据处理过程中对测量结果进行修正,减小位置定位误差。
2. 大气层延迟的修正:测量中常常使用双频观测来估计大气层延迟,并进行相应的修正。
此外,还可以通过使用大气层模型,根据卫星信号的传播路径对延迟进行估计,从而减小误差。
3. 多径效应的修正:可以使用多普勒滤波器或者抗多径接收算法来减小多径效应带来的误差。
这些方法可以通过抑制多径信号的影响,提高接收到的信号质量。
4. 时钟误差的修正:可以通过使用更精确的时钟来减小时钟误差带来的影响。
天线变形测量误差分析

无论远场近场,信号函数g u,v与变形Fξ,η均有以下关系以下讨论远场:以下考虑一维的问题,远场时将r使用球坐标展开到2次可以很精确的得到一个傅立叶变换:幂函数的泰勒公式及其收敛域如下:(1+x)m=1+mx+m(m−1)x2+m(m−1)(m−2)x3+οx3x<11+x=1+1x−1x2+1x3+οx3x<1若只展开1阶:1+x=1+12xΔx=1+x−(1+12x) ~(−18)x2r的精确表达式如下:r=R1−2uξ+vηR+ξ2+η2R2=R1+(−2uξ+vηR+ξ2+η2R2)r的1阶泰勒展开如下:r′≈R1+12−2uξ+vηR+ξ2+η2R2=R−uξ+vη+ξ2+η22R收敛条件:−2 uξ+vη R +ξ2+η2R 2<1 显然,每一个点都要满足收敛条件,则根据极大误差条件下:u =0v =0ξ=r 0η=0由此解得:r 02R 2<1, R >r 0=55 m 假定无人机飞行面最大半径为r f ,以下推导R 和r f 对一阶泰勒展开误差的影响: 此时取值应该为平均值,这个平均值应该认为是误差的积分平均值: 误差积分:Δ x dx = 1+x −1−1x dx = 1+1x − 1+x dx = 1− uξ+vη +ξ2+η22− 1−2 uξ+vη +ξ2+η22dudvdξdη 使用极坐标表示,注意到:u =x R =lsinαR v =y R =lcosαR ξ=ρsinθη=ρcosθlϵ[0,r f ]ρϵ[0,r 0]αϵ[0,2π]θϵ[0,2π]则误差积分为:1−ρlcos α−θ R 2+ρ22R 2− 1−2ρlcos α−θ R 2+ρ2R 2 r f0r 002π0(lρ)2π0dl dρ dα dθ 显然,没有解析解,不过可以使用数值解法。
Δx dx=R,r f=1−ρlcosα−θR2+ρ22R2−1−2ρlcos(α−θ)R2+ρ2R2l,ρ,α,θ(lρ)之前的的收敛条件没有考虑r f的作用,此处可以清晰的看出,收敛条件为:2ρlcos(α−θ)−ρ2<12ρl2+ρ22<1R>ρ+2ρl=r0+2r0r f因此近场测量收敛条件要求r f尽量小,假定其值为1,则最小可取的R是133 m。
激光干涉法近场扫描架平面度高精度测量及误差分析

扫描 而成 平 面 的平 面 度 ,运 用 M A T L A B绘 出 各 测量 点
在 z向相 对 最小二 乘平 面 的距 离 ,如 图 5所示 。
导致局部空气折射率 随机变化 ,从而导致光束随机抖 动 。对 于光线 弯 曲 和大 气 扰 动 ,通 过 环 境 补 偿 可减 小
侧 的仪器 误差 。
5 . 3 斜 率误差
图 5 扫 描 架 平 面 度 误 差 三 维 图
斜率误差是 由于被测位移轴线和直线度反射镜 的 光学轴线之间不平行引起 ,测量数据存在随动镜 移动
-
5 4・
计量 、测试 与校准
2 0 1 3年第 3 3卷第 2期
而递增 的趋 势 ,斜 率误差 过 大会 带来 较 大 的测 量误 差 。
各’ 狈 4 点到最 小二 乘平 面距 离 为
r 一
b l X +b 2 Y —Z + b 。
,
[、 Βιβλιοθήκη  ̄ / 1 + b + b ;
扫描架平面度为f= } d + I +l d ~ l =7 6 . 8 m
为 了便 于较 直 观认 识 扫 描 架 和 y轴所 走 轨m 迹 m m m 轴 m" m m
引 入 了测 量误 差 为 ± 0 . 1 5 M2 m ( 为行 程 距离 ) 。为
了得 到 更 高 的精 度 ,在 完 成 第 一 组 测 量 之 后 ,需 要 将
反射镜旋转 1 8 0 。 再重 复测量一组 数据 ,将两组数据的 均值 作 为最 终 的评 定 结 果 ,这 样 可抵 消反 射 镜 左 右 两
度测 量 运用长 时 间取 平 均 值 ( 4 S内采 集 4 0 9 6个顺 序 读 数求平 均值 并显示 结果 ) 。另 外 ,由于 直线 度测 量 本 质 是测 量两束 光 的光 程 差 ,影 响 线性 测 长 的 因素 仍 会 对 直线 度测 量 结 果 产 生影 响 ,尤 其 是 大 量 程 测量 ,光 束 完全 分 开 ,有必 要 对 光 束 引人 环 境 补 偿 ,补偿 环 境
超低副瓣天线平面近场测量采样间距误差分析
n a r n e a r - f i e l d me a s u r e me n t b y me a n s o f c o mp u t e r s i mu l a t i o n, a c q u i r e s s o me l a ws a n d u s e f u l r e — s u l t s , a n d p r o v e s t h e a p p l i c a b i l i t y a n d c o r r e c t n e s s o f Ny q u i s t y s a mp l i n g t h e o r y i n u l t r a — l o w s i d e l o b e
2 0 1 5年 6月
舰 船 电 子 对 抗
S HI P B0ARD E LECTR0NI C COUNTERM EAS URE
J u n . 2 0 1 5
Vo 1 . 3 8 No . 3
第 3 8卷第 3期
超低 副瓣 天 线平 面近 场 别是 z和 Y方 向的采 样 间距 , 为波长 。 对 于副 瓣要 求 不 高 的 天线 来 说 , 一 般 只要 满 足 采 样 准则 即可 满足精 度要 求 。但对 于精 度要求 非 常
高 的超低 副瓣 天线 来 说 , 普 通 天 线可 以忽 略 的误差
项则 有可 能对 超低 副 瓣 产 生 很 大影 响 , 从 而 影 响 最 终测 试 的准确 性 。当然 可 以采 取在 满足 采样 准则 的 前提 下 , 进 一步 减小 采样 间距 , 但 这样 的结果 是带 来 了时间成 本 的增加 , 尤其 对 于大型 阵列 天线 , 测试 时 间可 能增 加到 2 ~3倍 。
天线平面近场测量的扫描面位置误差分析
Ab ta t Th s p p r wa a e n t e b sc t e r fa t n a pa a e rfed me s rm e t t c n lg O su y t e src : i a e s b s d o h a i h o y o n e n l n r n a -il a u e n e h o o y t t d h l td s a n n l n o a i n e r r a d i fe t o h n e n a i t d p te n b k n s f t e n me ia i e c n i g p a e l c t ro n t e f c n t e a t n a r da e a t r y ma i g u e o h u rc l mi o s me h d t o .Th o g o a ig wi h h r tc r s l , h p l i o r o n u e y s a -o a i n e r r n me y t e r u h c mp rn t t e t e e i e u t t e u i t fe r r i d c d b c n l c t r o , a l h h o m o u c r an y o h a t n a a it d p te n, s g v n Th s a e p o i e s me h r tc r o s o t e e r r n e t i t f t e n e n r d a e a t r wa i e . i p p r r v d d o t e e i o p o f f r h r o c mp n a in o h n e n e rf l a u e n e h o o y o e s t ft e a tn a n a -i d me s r me tt c n l g . o e Ke wo d :a t n a p a e n a -il a u e n ; e r r a a y i y rs n e n ; l n e rfed me s r me t r o n l ss
天线实验报告误差分析
天线实验报告误差分析一、引言天线是无线通信系统中非常重要的组成部分,其性能直接影响到通信质量。
在天线设计和测试过程中,误差是无法避免的。
本文将对天线实验报告中的误差进行分析,并探讨其对天线性能的影响。
二、误差来源及分类在天线实验中,误差可以来源于多个方面,主要包括以下几个方面:1. 天线制造误差天线的制造过程中存在一定的误差,如天线的制造材料、加工工艺等都会对天线性能产生影响。
这类误差通常表现为天线的频率响应不符合理论值,天线增益不稳定等。
2. 环境误差天线实验通常在室外进行,而室外环境是非常复杂和多变的。
大气条件、地物遮挡等因素都会对天线的测试结果产生影响。
这类误差通常表现为天线增益与距离的关系不符合理论预期,信号传输的可靠性下降等。
3. 测量误差天线测试是一个精密的过程,通常需要使用专业的测试设备进行测量。
测量设备的精度、稳定性等都会对测量结果产生误差。
同时,测量过程中也存在人为误差,如操作不规范、测量方式选择不当等。
三、误差分析及影响误差的存在会直接影响到天线的性能和功能。
下面将针对不同的误差来源进行分析:1. 天线制造误差天线制造误差是由于制造过程中的不完美造成的。
例如天线的外形尺寸、材料参数等与设计要求的差异都会使得天线的实际性能与理论值产生误差。
这会导致天线的频率响应不合理,增益不稳定等问题。
对于需要高精度的天线应用,天线制造误差可能导致性能无法达到要求,需要进行更加精确的制造工艺。
2. 环境误差环境误差是由于实验环境的不完善造成的。
例如天线测试时的大气条件、地物遮挡等因素都会对测量结果产生影响。
这会导致天线增益与距离关系不合理,信号传输的可靠性下降等问题。
在实际应用中,我们需要对环境误差进行适当的修正和补偿,以尽可能减小其对天线性能的影响。
3. 测量误差测量误差是由于测量设备和操作过程中的不完美造成的。
例如测量设备的精度、稳定性等都会对测量结果产生误差。
同时,操作者的不规范操作也会导致测量误差,比如测量位置选择不当、测量参数设置错误等。
平面近场比较法增益测量的误差分析
天 线增 益是 天 线 性 能 的 重要 指 标 之 一 , 增 益 值 决 定 了接 受天 线接 收 能力 的大小 或者 发射 天线 辐 射 能力 的强弱 , 因此天 线增 益 的测量 是天 线测 量 中 的关键 , 准
确 高效 的测 量 增 益 方 法 也 是 天 线 测 试 人 员 的研 究 目 标 。在 比较 法测 量增 益 的过 程 中 , 有 很 多 因 素 会 影 响 增 益 的测量 精度 , 包 括天 线 的极化 匹 配误差 、 反射 系 数 误差 、 平 面近场 截 断误 差 等 。本 文 通 过 理 论 分 析 与 实 验 测量 研究 这些 误 差 项 对 增 益 测 量 带 来 的 影 响 , 给 出 降低测 试误 差 的方 法 。
算 公 式 。然 后 对 近 场 比较 法增 益 测 量 中常 见 的 3种 误 差 进 行 了 实 验 对 比 ,定 量 的 分 析 了其 对 于 天 线 增 益 测 量 的 影 响 , 并 最 终 给 出 了相 应 的 降低 增 益 测 量误 差 的 方 法 。 关键词 增 益 测 量 ; 平 面 近 场 ;误 差 分 析 T N 8 2 1 . 8 文献标识码 A 文章编号 1 0 0 7— 7 8 2 0 ( 2 0 1 5 ) 0 6—1 3 0— 0 3 中图 分 类 号
在 平 面近场 测 量 中 , 比较 法 是 一 种 常 用 的测 量 待 测 天线 增益 的方 法 j , 与其 他测 量增 益 的方法 比较 , 比
较法 测 量增 益速 度快 , 精 度高 , 且其 无需 了解 采 集 天线 或探 头 的增 益 值 。 因此 在 日常 测试 中 , 比较 法测 量 增
a 叶拭 2 0 1 5 年 第 2 8 卷 第 6 期
天线测试中的误差分析
方位旋 转 部 分
图 1 传 统 转 台
方位旋 转 部分
俯 仰 旋 转 部 分
的 , 仰角 越大误 差 越大 。如果用 方 位在 俯仰 上 且
的转台( 如图 2或是使用三维转 台( ) 如图 3 , ) 这
个 问题 就可 以解 决 。所 以采 用俯 仰 在上 、 方位 在
场地 、 测试设 备 、 气候 等各 种 因素 , 在各 项测试 会 的电参数 中引入 误 差 , 因此需 要尽 可 能 降低这 些
误差 , 提高 测试 的准 确性 。
1 测 试 转 台形 式 引起 的误 差
收发 天线如 果架 设 高度 不 同 , 用传 统 的二 采
维转 台 ( 图 1 , 仰 在 上 、 位 在 下 , 会 产 生 如 )俯 方 就 测 角 误 差 , 时测 得 的 方 向 图不 是 主 面 的 方 向 此
图 2 新 型 转 台
下 的转 台( 统 的二 维 转 台 ) 就 要 尽 量 让 收 、 传 , 发
两 天线 在 同一水 平 面上 。
2 1 方位 不 同轴 产 生来自的误 差 .2 测试 天 线 安装 引 起 的误 差
在天线测试 时, 天线应该放置在转 台的原点
收稿 日期 :20 一O 0 6 6一O 6
me s r h n e n a a e e s mo e c r e ty a u et ea tn a p r m t r r o r cl.
Ke r s a e a t s ; r o n l ssi a a t r me s e n y wo d : nt nn e t e r r a a y i p r me e a ur me t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Im 为-40dB 的切比雪夫分布, In 为余弦分布, f (θ ,ϕ )
为沿 y 轴放置的半波阵子的远场方向图函数。根据叠
加定理以及镜像原理, 自由空间 M×N 单元平面阵的
任意一点的近场为:
∑ ∑ Ey
(xp
,
y
p
,
d
)
=
−
j30I
M m=1
N
Cmn
n=1
⎛ ⎜⎜⎝
e− jkR1mn R1mn
近场测量是用一个特性已知的探头, 在离开待 测天线几个波长的某一表面进行扫描, 测量天线在 该表面离散点上的幅度和相位分布, 然后应用严格 的模式展开理论, 确定天线的远场特性[1]。
但是, 由平面近场技术确定天线的特性是一种 间接的测量方法, 由于各种原因会带来较大误差,
其测量结果的不确定性由多种因素决定的。主要的 误差源可以归纳为 18 项[2], 大致可以分为 4 个部分 即探头误差、测量系统误差、环境误差及随机误差。 目前, 对平面近场测量, 国外学者已经通过理论分 析和计算机模拟得到了各误差源引起的远场误差的 上界[3-4], 各项误差源的减小和补偿技术已被用来提 高测试精度和结果的可靠性[5-6]。
取 M=7, N=5, dx=0.49λ, dy=0.98λ, 由式(1)直接
计算阵列天线的理论方向图。显然, 扫描面取得越大
时, 计算出来的远场方向图就和理想的差别越小, 误
差就趋于零。但实际测试中, 扫描面总是有限大的,
这样就引入了截断误差。按照式(8), 取Δx=Δy=0.5λ,
扫描面与天线口面间离 d=3λ, λ=200 mm (频 率
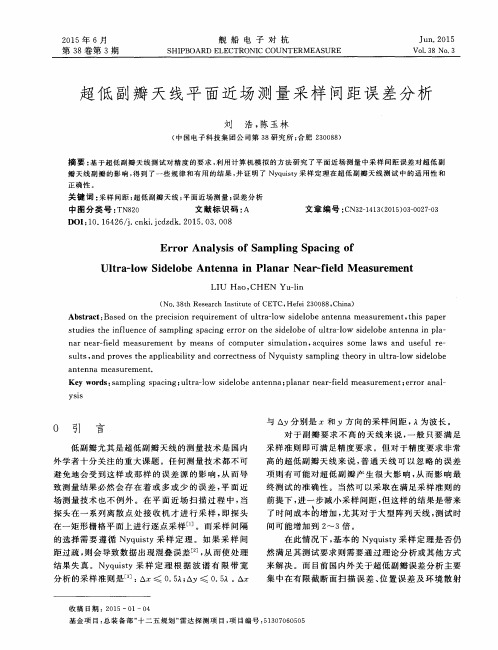
图1 模型示意图 Fig. 1 Schemes of model
根据叠加定理, 上述半波偶极子天线阵的理论 远场方向图函数为:
F (θ ,ϕ ) = f (θ ,ϕ ) ⋅
∑ ∑ M N Imne jk(mdxsinθ cosϕ +ndysinθ cosϕ )
(1)
m=1 n=1
式中: Imn=ImIn, 为阵列单元上电流的相对幅相分布,
当成真实数据代入到近远场变换公式中, 导致计算 错误, 影响了近场数据精度[10]。
同上, 取 M ′=53, N ′=55, Δx=0.5λ, Δy=0.5λ, d=3λ, 计算出理想网格上的近场, 并利用近场计算出理想 的远场方向图。然后, 根据系统扫描架定位测试结果: x 方向和 y 方向的定位精度均方根误差均为 0.04 mm, z 方向定位精度均方根误差为 0.9 mm。给理想网格上 每一点的 x、y、z 方向均叠加一个均值为零, 方差分 别为 0.04 mm, 0.04 mm, 0.9 mm 的正态分布的随机序 列, 计算出这些点的近场值。假设这些值是在不均匀 的栅格上得到的, 应用近远场变换公式可以得到远 场方向图。比较两个远场方向图, 其差值就是由位置 误差引起的误差。由于位置误差中包含的随机误差 是方差恒定均值为 0 的随机数, 为增加分析结果的 可靠性, 可以取多组这样的随机序列, 然后取其平 均值, 得到由于 x、y、z 位置偏差造成的平均远场方 向图误差。对 10 次位置误差分析取平均值, 得到副 瓣最大平均误差为 0.7113 dB。
平面近场测量精度的主要误差源之一。
扫描面大小:
Lx, y = a + 2 ⋅ d ⋅ tanφ (8)
式中: a 为待测天线在 X 或 Y 方向的尺寸; d 为探头与
待测天线的距离。为减小探头与待测天线间的多次
反射, d 应大于 3~5λ; φ是近场扫描角, 较小的φ角将
引起截断误差; Lx,y 是 X 或 Y 轴的扫描长度。
平行的, 采样点位置 ( p, d ) 被精确确定, 各位置点待
测天线近场数据是严格的位置值; 实际测量中, 由 于机械定位精度、探头尺寸等因素, 探头扫描线并不
平行和垂直, 探头定位在 ( p + Δp, d + Δd ) 处, 探头输
出 ( p + Δp, d + Δd ) 处的近场值, 从而把偏移的数据
多次耦合的影响; 给出了有探头补偿时由近场数据确定天线远场方向图的计算公式和 OEWG 探头的 E 面和 H 面方向图。通过
与理论结果比较, 得出了上述 5 项误差源产生的误差及其范围, 即测量天线方向图副瓣的不确定度大小。该研究为近场天线测
量技术的误差分析和补偿提供了一定的理论依据。
关键词: 天线测量;误差分析;平面近场测量;探头补偿
3.1 扫描面截断误差
理论上, 近场测量的采样数据应该在无穷大扫
描平面上获取, 再利用 FFT 变换成天线的远场。但
实际中, 扫描面是有限大的, 并且假定扫描面以外
的场为零, 从而在由近远场变换确定天线远场时必
然会带来误差。由有限扫描面所造成的误差称为有
限扫描面截断误差[7-9]。有限扫描面截断误差是影响
2 模型建立
如图 1 所示, 以一个 M×N 的半波阵子构成的矩 形阵列天线作为待测天线模型。阵子沿 y 轴放置, 阵 元数为 N, 沿 x 轴放置的阵元数为 M。阵列单元沿 x 轴方向的间距为 dx, 沿 y 轴方向的间距为 dy。理想 扫描面到阵列中心 O 的距离为 d。扫描面上沿 x 方向 的取样点数为 M ′, 采样间隔为Δx。沿 y 方向的取样 点数为 N′, 采样间隔为Δy。
Keywords: antenna measurements; errors analysis; plane near-field measurements; probe-compensated
1引言
天线测量技术是天线研制的关键技术之一。随 着国防、航空、航天、通信技术等迅速发展, 对天线 的精度和性能指标的要求越来越高, 常规的远场测 试手段无法满足现代天线测试的要求。近场测量由 于高精度、全天候工作和保密的特点, 成为近年来国 内外普遍采用的现代测试技术。
平面近场天线测量误差分析
· 989 ·
图2 扫描面14λ×16λ Fig. 2 Scanning Plane 14λ×16λ
图3 扫描面26λ×28λ Fig. 3 Scanning Plane 26λ×28λ 结果之间的误差随扫描面的增大而减小, 但对于每 一个扫描面而言都存在相应的可信域, 在可信域内 的误差很小, 可信域外误差变化很大。 实际平面近场扫描中, 增加采样面必然导致数 据量太大, 不适合计算机实时数据处理; 另一方面, 过大的采样面有时是不必要的, 而且还可能带来负 面的影响。如果采样面边缘信号电平太低被噪声湮 没时, 测量到的信号就不是我们想要得到的数据了。 所以在某些情况下, 采样面的截断是有必要的。为保 证测试精度, 所选择的扫描面大小应保证截断电平 足够低, 一般在−40 dB 以下。 3.2 扫描面位置误差 平面近场扫描测量中, 理想情况下, 探头在扫 描面网格上均匀移动, 扫描的轨迹线是完全垂直和
本文于 2010 年 6 收到。 *基金项目: 国家重点实验室基金项目(编号: 60671056)资助项目。
· 988 ·
电子测量与仪器学报
第 24 卷
图的公式和 OEWG 探头的 E 面和 H 面方向图。通过 与理论结果分析比较, 估算了上述 5 项误差项影响 天线副瓣测量精度的大小和系统的测量精度。
+ e− jkR2mn R2mn
⎞ ⎟⎟⎠
(3)
Ex (xp , yp , d ) = j30I ⋅
∑∑ ⎛
MN
⎜
Cmn ⎜
m=1 n=1
⎜⎜⎝
y−λ 4
d
e− jkR1mn R1mn
+
y+λ 4
d
e− jkR2mn R2mn
⎞ ⎟ ⎟ ⎟⎟⎠
x (4) x2 + y2
式中:
R1mn = (xm − y p )2 + ( yn' − yq )2 + d 2
中图分类号: TN820
文献标识码: A
国家标准学科分类代码: 140.35
Errors analysis of planar near-field antenna measurement
Li Yong Ou Jie Xu Ping
(National Key Laboratory of Antennas and Microwave Technology, Xidian University, Xi’an 710071, China)
本文根据某平面近场天线测试系统的机械测量 精度、定位精度、暗室环境和所用仪器等情况, 以半 波偶极子阵列天线为模型, 采用计算机仿真的方法, 模拟该系统在测量中的有限扫描面的截断误差、位 置误差和暗室环境误差对天线方向图的影响; 另外 利用自比较法测试探头和 AUT 之间多次耦合的影响; 给出了有探头补偿时由近场数据确定天线远场方向
李勇 欧杰 徐平
(西安电子科技大学天线与微波技术国家重点实验室, 西安 710071)
摘 要: 基于平面近场天线测量的基本理论, 以半波偶极子阵列天线为模型, 利用数值分析的方法研究了平面近场天线测
量中的有限扫描面截断误差、位置误差和暗室环境误差对天线方向图副瓣特性的影响; 并用自比较法实测了探头和 AUT 之间
小为 14λ×16λ时, 天线近场测量变换所得 E 面方向图
与理论计算 E 面方向图的副瓣误差小于 0.802 dB; 当
扫描面大小为 26λ×28λ时, 两种方法计算出的天线 E
面方向图非常吻合, 副瓣最大误差小于 0.514 8 dB。
由此得出, 近场测量所得的方向图与理论远场计算
第 11 期
Abstract: This paper is based on the basic theory of planar near-field antenna measurement technology, the effects of the finite scanning plane truncation errors, location errors and room scattering errors on the characteristics of antenna sidelobe in planar near-field antenna measurement are studied through numerical method by a mode of a dipole antenna array . The effect of multiple reflections between probe and AUT is measured by self-comparison method, the expression for the far-field pattern driven by near-field data with probe-compensated are given. The OEWG probe's E-plane and H-plane pattern are also given. Compared with the theoretical result, the boundary of the errors are given and obtain the uncertainty of antenna pattern. This study provides some theory proof for the error analysis and compensation of the plane near-field antenna measurement.