mcgs 脚本使用小车往复运动
实例讲解丨小车往返运动编程案例

实例讲解丨小车往返运动编程案例一、小车往返运动用S7-200实现小车往返的自动控制,控制过程为按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。
如此的往返运动,直到当按下停车按钮后小车停止运动。
▲电气接线图I/O分配表梯形图程序PLC接线图程序调试及结果分析▲控制平台操作面板当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示灯Q0.0 亮)。
当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f,模拟SQ2被压下)接通,此时小车左行(指示灯Q0.0灭,指示灯Q0.1亮),当运行到左边碰到左限位SQ1即i0.3(鼠标点击i0.3f)接通,此时小车又往右运行(指示灯Q0.1灭,指示灯Q0.0 亮)。
如此往返运动下去直到按下SB1即i0.2(鼠标点i0.2f)接通,小车停止运行。
附:二、闪光电路当按下启动按钮后,要求在两秒钟内有一秒亮有一秒灭,如此反复,灯一闪一闪发光。
I/O分配表梯形图程序PLC接线图程序调试及结果分析把编写好的程序下载到西门子s7-200PLC中进行调试。
观察运行结果和实验要求是否相同。
通过在线控制面板进行调试,当按下在线控制面板上的I0.0f(即 I0.0 接通)此时Q0.0有输出,Q0.0所接负载灯就亮,同时启动定时器T37开始计时,当计时一秒后因T37动作,其常闭触点断开,所以Q0.0无输出,所接负载灯灭。
灯灭的同时启动定时器 T38,T38 计时一秒后,把串联在定时器T37的常闭触点断开,所以T37复位,T37常闭触点恢复常闭。
此时Q0.0 又有输出,所接负载灯又亮。
这样,输出Q0.0上所接的负载灯以接通一秒,断开一秒频率不停的闪烁,直到按下在线控制面板上的I0.1f(即I0.1接通),闪光电路不在继续工作。
若想改变灯闪烁的频率只要改变定时器的时间就能够达到改变要求。
欧姆龙plc与mcgs组态软件通信组态实例小车自动往返装卸料

2. 添加PLC设备
(3)在MCGS中PLC设备是作为子设备挂在串 口父设备下的,因此在向设备组态窗口中添加 PLC设备前,必须先添加一个串口父设备。欧姆 龙PLC的串口父设备可以用“串口通讯父设 备”,也可以用“通用串口父设备”。 “通用 串口父设备”可以在上图中左侧所示“可选设 备”列表中可以直接看到。“串口通讯父设备” 在“可选设备”列表的“通用设备”中,需要 打开“通用设备”项。双击“通用串口父设 备”,该设备将出现在“选定设备”栏。
2. 添加PLC设备
(4)双击“PLC设备”,弹出能够与MCGS通 信的PLC列表。选择“欧姆 龙”→“HostLink”→“扩展Omron HostLink”,双击“扩展Omron HostLink”图 标,该设备也被添加到“选定设备”栏,如图 所示。
2. 添加PLC设备
(5)单击“确认”,“设备工具箱”列表中出 现以上两个设备。来自3.设置PLC设备属性
3.设置PLC设备属性
(5)单击“[内部属性]”之后出现的“…”按钮,弹出图所示窗 口,列出了PLC的通道及其含义。内部属性用于设置PLC的读 写通道,以便后面进行设备通道连接,从而把设备中的数据送 入实时数据库中的指定数据对象或把数据对象的值送入设备指 定的通道输出。欧姆龙PLC设备构件把PLC的通道分为只读, 只写,读写三种情况,只读用于把PLC中的数据读入到MCGS 的实时数据库中,只写通道用于把MCGS实时数据库中的数据 写入到PLC中,读写则可以从PLC中读数据,也可以往PLC中写 数据。本设备构件可操作PLC的:IR/SR(输入输出/专用继电 器) ;LR(链接继电器),HR(保持继电器),AR(辅助继电 器),TC(定时器计数器),PV(定时计数)DM(数据寄存 器)。
基于MCGS组态软件的送料小车自动往返运行监控系统设计
基于MCGS组态软件的送料小车自动往返运行监控系统设计【摘要】本文主要介绍了基于MCGS组态软件的送料小车自动往返运行监控系统设计。
在分别介绍了研究背景、研究意义和研究目的。
在详细展示了系统架构设计、监控系统界面设计、运行监控策略设计、故障诊断与处理方案以及系统集成与测试。
在进行了实验结果分析,评估了系统的优势与不足,并展望了未来的发展方向。
通过本文的研究,可以为送料小车运行监控系统的设计和优化提供重要参考,有助于提高生产效率和运行安全性。
【关键词】MCGS组态软件、送料小车、自动往返运行、监控系统设计、系统架构、界面设计、监控策略、故障诊断、系统集成、实验结果分析、系统优势、未来展望。
1. 引言1.1 研究背景研究背景:随着工业自动化的不断发展,自动化设备在生产线上的应用越来越广泛。
送料小车是一种常见的自动化设备,用于在生产线上来回运输物料。
传统的送料小车需要人工操作或者预设路线来实现运行,存在人为操作不可靠、效率低下等问题。
为了解决这些问题,利用MCGS组态软件开发一个自动往返运行监控系统是非常必要的。
该系统可以实现小车自动往返运行,提高生产效率,减少人为因素对系统的影响。
目前,基于MCGS组态软件的自动往返运行监控系统设计在工业领域中得到了较多关注和研究,但是在实际生产中的应用还存在一些问题和挑战。
本研究旨在通过系统架构设计、监控系统界面设计、运行监控策略设计、故障诊断与处理方案以及系统集成与测试等方面的探讨,对基于MCGS组态软件的送料小车自动往返运行监控系统进行深入研究与完善。
通过本研究的实施,将为工业生产过程中自动化设备的运行管理提供更为有效的解决方案,推动工业自动化技术的发展和应用。
1.2 研究意义送料小车自动往返运行监控系统是现代工业生产中常见的自动化设备,具有提高生产效率、降低生产成本、减少人工操作等优点。
而基于MCGS组态软件的监控系统设计,则可以通过图形化界面直观显示小车的运行状态、运行轨迹等信息,并实现对小车的监控与管理。
组态王监控三菱PLC的小车往复变速运动控制

组态王监控三菱PLC 的小车往复变速运动控制系统设计一、 系统组成由三相异步电机拖动小车在轨道上做往返变速运动,变频器控制电机实现正反转和变频调速。
PLC 接收按钮和小车左右限位开关的信号,控制变频器的工作状态。
用PLC 的编程口和USB-SC-09编程电缆与计算机通信,也可以在PLC 上安装FX2N-232-BD 通信功能板,用232串口线与计算机通讯。
二、 P LC 控制电路三、 在PLC 参数设定和控制程序表1 PLC 的I/O 端口分配输入输出X0 变频器异常保护BC 端 Y0 电机正转STF X1 变频器通电按钮 Y1 电机反转STR X2 变频器断电按钮 Y2 电机低速RL X3 小车停止按钮 Y3 电机中速RM X4 小车右行按钮 Y4 电机高速RH X5 小车左行按钮 Y10 变频器通电KM X6 小车加速按钮 X7 小车减速按钮 X10 小车左边限位开关 运行组态王监控程序L1L2L3表2 电机转速设定电机转速档PLC端口Y4 Y3 Y2变频器端口RH RM RL变频器参数设定1档001 OFF OFF ON Pr.06=10(10Hz)2档010 OFF ON OFF Pr.05=20(20Hz)3档011 OFF ON ON Pr.24=30(30Hz)4档100 ON OFF OFF Pr.04=40(40Hz)5档101 ON OFF ON Pr.25=50(50Hz)6档110 ON ON OFF Pr.26=60(60Hz)7档111 ON ON ON Pr.27=70(70Hz)在GXDeveloper或GXworks2编程软件中设置PLC通信参数:也可以在梯形图程序中初始化PLC通信参数:PLC控制程序:四、 组态王监控系统1、画面设计2、设备和通信设置用USB-SC-09编程电缆把PLC和电脑连接起来,PLC接通电源,安装USB-SC-09驱动程序后。
打开设备管理器,找到“Prolific USB-to-Serial Comm Port(COM3)”端口,然后双击该项弹出端口设置对话框,进行通信设置。
基于MCGS组态软件的送料小车自动往返运行监控系统设计

基于MCGS组态软件的送料小车自动往返运行监控系统设计【摘要】本文针对送料小车自动往返运行监控系统设计,基于MCGS组态软件开发。
在介绍了研究背景、目的和意义,以及当前研究现状。
在详细阐述了系统架构设计、数据采集与处理、故障诊断与处理、界面设计以及系统性能测试。
结论部分总结了设计过程,展望了系统的应用前景,并讨论了存在的问题及改进方向。
通过本文的研究,将为送料小车自动往返运行监控系统的设计和实施提供重要参考,提高了系统的可靠性和效率,为相关领域的研究和应用提供了有益的经验。
【关键词】MCGS组态软件、送料小车、自动往返运行、监控系统设计、系统架构、数据采集、故障诊断、界面设计、系统性能测试、设计总结、应用前景、存在问题、改进方向。
1. 引言1.1 背景介绍随着自动化技术的不断发展和应用,自动化系统在工业生产和物流领域中起着越来越重要的作用。
送料小车是一种常见的自动化运输设备,在工厂及仓储物流中扮演着重要角色。
为了提高送料小车的运行效率和安全性,设计一个基于MCGS组态软件的自动往返运行监控系统变得至关重要。
在传统的送料小车系统中,往往需要人工操作或固定的运行路线,存在操作不便捷、效率低下以及安全性风险较高的问题。
基于MCGS组态软件的自动往返运行监控系统能够实现对送料小车的自动控制和监控,不仅提高了生产效率,还能降低人为因素造成的操作错误和事故风险。
通过该系统的设计和应用,可以实现送料小车的智能化运行管理,优化生产流程,提升生产效率。
该系统还可对送料小车的运行状态进行实时监控和故障诊断,及时处理异常情况,保证设备的安全运行和稳定性。
设计基于MCGS组态软件的送料小车自动往返运行监控系统具有重要的实际意义和应用价值。
本文将从系统架构设计、数据采集与处理、故障诊断与处理、界面设计和系统性能测试等方面展开研究和探讨,为相关领域的研究和应用提供参考和借鉴。
1.2 目的和意义送料小车自动往返运行监控系统的设计旨在提高生产线的运行效率和安全性。
实训一、小车自动往返
实训一、小车自动往返
一、实训目的
1、熟悉常用指令的功能和使用方法。
2、初步掌握根据控制要求编制、调试程序的基本方法。
3、用PLC构成系统自动送料装车系统。
二、实训设备
FP1-C24或以上机型1台计算机1台
实验开关板连接导线一套。
三、实训内容
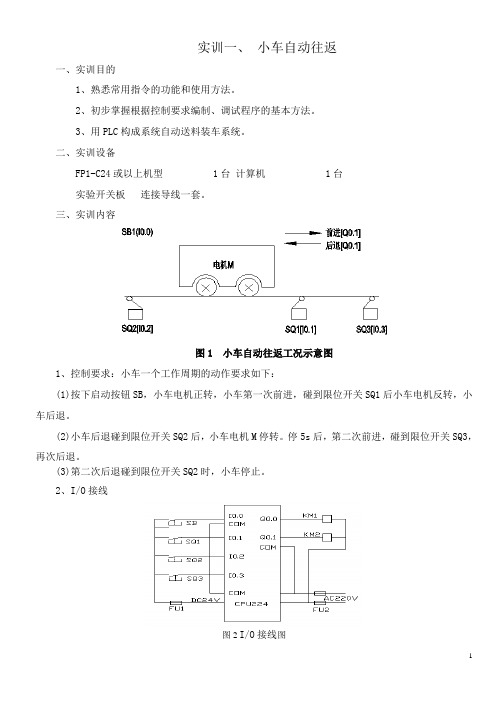
图1 小车自动往返工况示意图
1、控制要求:小车一个工作周期的动作要求如下:
(1)按下启动按钮SB,小车电机正转,小车第一次前进,碰到限位开关SQ1后小车电机反转,小车后退。
(2)小车后退碰到限位开关SQ2后,小车电机M停转。
停5s后,第二次前进,碰到限位开关SQ3,
再次后退。
(3)第二次后退碰到限位开关SQ2时,小车停止。
2、I/O接线
图2 I/O接线图
3、按梯形图输入程序。
4、调试并运行程序。
四、实训报告要求
1、写出调试好程序(梯形图、指令表及注释)
2、程序编制、调试中出现的问题及分析、处理方法。
图3 小车往返控制方案一梯形图
图4 小车往返控制方案二梯形图。
基于MCGS组态软件的送料小车自动往返运行监控系统设计
基于MCGS组态软件的送料小车自动往返运行监控系统设计1. 引言1.1 研究背景近年来,随着制造业的快速发展和生产水平的不断提高,对生产效率和质量要求也越来越高。
在传统的生产线上,送料小车的往返运行一直是一个重要的环节,其运行状态的监控与管理直接影响着整个生产线的运行效率。
传统的手动监控方式存在监控盲区大、数据采集不及时等问题,严重影响了生产线的稳定性和效率。
为了解决这一问题,基于MCGS组态软件的送料小车自动往返运行监控系统设计应运而生。
该系统利用现代化的软件技术和自动化控制原理,实现对送料小车的实时监控、运行状态分析和异常处理,提高了生产线的运行效率和管理水平。
本研究旨在通过对MCGS组态软件和自动化控制原理的深入研究,设计一套高效可靠的送料小车自动往返运行监控系统,为制造业生产线的智能化发展提供技术支持和解决方案。
通过优化系统设计和关键技术应用,实现生产线的智能管理和自动化运行,提升企业的竞争力和市场地位。
1.2 研究目的研究目的旨在通过基于MCGS组态软件的送料小车自动往返运行监控系统设计,实现对送料小车运行情况进行实时监控和管理,提高生产效率和设备利用率。
具体目的包括:①实现对送料小车的运行状态、位置和运行路径的实时监控;②提供实时报警功能,及时发现并处理设备故障和异常情况;③优化生产流程,提高生产效率和资源利用率;④提高生产过程的自动化程度,减少人力成本和人为因素带来的风险;⑤为企业管理层提供决策支持,通过数据分析和报告,提升管理决策的准确性和科学性。
通过实现以上目的,提升企业的竞争力和市场地位,推动智能制造的发展,助力企业实现可持续发展的目标。
1.3 研究意义送料小车自动往返运行监控系统设计的研究意义主要体现在以下几个方面:1. 提高生产效率和节约成本:通过对小车自动往返运行进行监控和优化,可以有效提高生产线的运行效率,减少人力成本和运输成本。
系统能够自动监测小车的运行状态,及时发现故障并进行处理,从而避免因为故障而导致的生产中断和时间浪费。
mcgs小车自动往返课程设计
mcgs小车自动往返课程设计一、课程目标知识目标:1. 学生能理解mcgs小车自动往返的基本原理,掌握相关编程知识。
2. 学生能描述mcgs小车自动往返过程中的传感器使用及其作用。
3. 学生能掌握小车往返过程中速度、方向的调整方法。
技能目标:1. 学生能够运用所学知识,独立设计并实现mcgs小车自动往返的程序。
2. 学生能够通过实际操作,调试并优化小车自动往返的过程,提高小车运行效率。
3. 学生能够通过团队协作,共同解决问题,培养沟通与协作能力。
情感态度价值观目标:1. 学生对mcgs小车自动往返产生浓厚兴趣,激发探究欲望。
2. 学生在课程中培养创新精神和实践能力,增强自信心。
3. 学生通过课程学习,认识到编程与实际生活的紧密联系,增强学以致用的意识。
课程性质:本课程为实践性课程,注重培养学生的动手操作能力和创新能力。
学生特点:学生处于初中阶段,具有一定的编程基础和动手能力,好奇心强,喜欢探索新事物。
教学要求:结合学生特点,注重理论与实践相结合,强调实际操作,鼓励团队协作,关注个体差异,提高学生的综合素质。
通过本课程的学习,使学生能够将所学知识应用于实际情境中,培养解决问题的能力。
二、教学内容1. mcgs小车结构及原理:介绍mcgs小车的基本结构,包括电机、传感器、控制器等组成部分,分析其工作原理。
相关教材章节:第一章《mcgs小车概述》2. 编程基础知识:回顾与mcgs小车编程相关的语法、逻辑结构等基础知识。
相关教材章节:第二章《编程基础》3. 传感器使用:讲解并实践mcgs小车所使用的传感器,如红外线传感器、超声波传感器等,及其在自动往返过程中的作用。
相关教材章节:第三章《传感器及其应用》4. 小车程序设计:学习如何设计mcgs小车自动往返的程序,包括编程思路、流程图绘制等。
相关教材章节:第四章《程序设计》5. 实践操作与调试:分组进行实践操作,调试并优化小车自动往返的程序,提高小车运行效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在设备管理中选择模拟设 备
添加到设备窗口中
随后打开窗口0
然后点击实时数据库 添加一个变量为位置 数值形的数据
在工具箱中选择位图
点击装在位图 选择图片 即可
然后出现了小 车的样子 调整 成正常的即可
点击水平移动和可见 度
按照这样设置即可
同样的 反转一个一样的图片后添加进来
点击水平移动和可见度
按照这样设置即可
然后点击窗口属性Βιβλιοθήκη 将循环脚本写入如下代码 循环时间是代表多少毫秒 执行一次 1000ms 就是一 秒钟 代码的意思是 一秒钟位置 +1 当位置加到11的时候 位置= 0 重复运行 实现了 小车的往复运动