plc控制小车往复运动实验图
实例讲解丨小车往返运动编程案例

实例讲解丨小车往返运动编程案例一、小车往返运动用S7-200实现小车往返的自动控制,控制过程为按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。
如此的往返运动,直到当按下停车按钮后小车停止运动。
▲电气接线图I/O分配表梯形图程序PLC接线图程序调试及结果分析▲控制平台操作面板当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示灯Q0.0 亮)。
当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f,模拟SQ2被压下)接通,此时小车左行(指示灯Q0.0灭,指示灯Q0.1亮),当运行到左边碰到左限位SQ1即i0.3(鼠标点击i0.3f)接通,此时小车又往右运行(指示灯Q0.1灭,指示灯Q0.0 亮)。
如此往返运动下去直到按下SB1即i0.2(鼠标点i0.2f)接通,小车停止运行。
附:二、闪光电路当按下启动按钮后,要求在两秒钟内有一秒亮有一秒灭,如此反复,灯一闪一闪发光。
I/O分配表梯形图程序PLC接线图程序调试及结果分析把编写好的程序下载到西门子s7-200PLC中进行调试。
观察运行结果和实验要求是否相同。
通过在线控制面板进行调试,当按下在线控制面板上的I0.0f(即 I0.0 接通)此时Q0.0有输出,Q0.0所接负载灯就亮,同时启动定时器T37开始计时,当计时一秒后因T37动作,其常闭触点断开,所以Q0.0无输出,所接负载灯灭。
灯灭的同时启动定时器 T38,T38 计时一秒后,把串联在定时器T37的常闭触点断开,所以T37复位,T37常闭触点恢复常闭。
此时Q0.0 又有输出,所接负载灯又亮。
这样,输出Q0.0上所接的负载灯以接通一秒,断开一秒频率不停的闪烁,直到按下在线控制面板上的I0.1f(即I0.1接通),闪光电路不在继续工作。
若想改变灯闪烁的频率只要改变定时器的时间就能够达到改变要求。
小车直线往返运动定位控制plc程序设计
小车直线往返运动定位控制p l c程序设计(总16页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March摘本实验运用PLC技术通过西门子S7-200仪器来实现的。
具体是由四个传感器、四个控制开关通过网络程序完成的。
实验包括了PLC编程、西门子运用及现场操作等各方面知识。
本设计是针对现代自动配货、配料运输等工业生产和商业运营的社会需求,设计一种小车直线定位控制系统。
关键词:PLC技术西门子PLC可编程控制程序网络梯形图目录1选题背景及意义选题背景随着智能机器人技术、汽车工业的迅速发展,关于智能小车的研究也就越来越受人关注。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究,可见其研究意义很大。
智能小车,也成轮式机器人,是一种以电子为背景,涵盖智能控制、模式识别、传感技术、电子电气、计算机、机械等多学科的科技创新性设计。
一般主要由路径识别、速度采集、角度控制及车速控制等模块组成。
本设计就是在这样的背景下提出来的,设计的小车自动往返运动应该能够实时循环运动和制动等功能。
选题意义为了使设计更为贴近生活,里面囊括了两个方面:一个是小车直线自动往返运行,这个设计在生活中一般被用在现代自动配货、配料运输等工业生产和善业运营中,目前已经成为了生活生产中不可或缺的一个设计。
我们正在逐渐的完善它使其效率更高。
另一个设计是小车制动控制,这个课题本身也是与生活息息相关的,对工业生产和商业运营来说是非常重要的因素。
在这里我们研究的只是简单地控制,是为我们以后的学习做个垫脚石。
只有我们学好的基础,以后工作中才可以不断的改进和研发。
基于这些因素,这次设计课题是非常有意义的。
2PLC简介PLC概述可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。
小车自动往返
我们本次实验室针对现实生活中现代自动配货、自动运料运输等工业生产和商业运营的社会需要。
在当今社会单片机已经完全满足不了需要所以我们应用了更加高端的PLC从技术上看,计算机技术的新成果会更多地应用于可编程控制器的设计和制造上,会有运算速度更快、存储容量更大、智能更强的品种出现;从产品规模上看,会进一步向超小型及超大型方向发展;从产品的配套性上看,产品的品种会更丰富、规格更齐全,完美的人机界面、完备的通信设备会更好地适应各种工业控制场合的需求。
所以本次实验应用PLC的S7-200 来设计的两个关于小车的自动控制系统。
第一个是小车直线自动往返控制。
它实现的事小车在始末站之间的自动往返运动,并且在控制过程中能及时的停止装置。
第二个的小车定位系统。
它实现的是小车在规定的站点之间和规定的次数进行往返运动,并且在完成规定动作后能回到指定的站点。
文中给出了具体的系统结构图,指出了系统的具体构成及所选的元件,列出参数的定义及1\0口地址分配表,还有详细的梯形图及每个网络所实现的作用。
完成了对小车的自动控制。
关键字:自动控制PLC 自动往返控制小车定位系统1选题背景及意义 (1)2系统简介 (2)2.1小车直线运动模型图及其介绍 (2)2.2系统中主要元件型号 (2)2.3电机主接线图 (2)3PLC简介 (4)3.1PLC工作原理 (4)3.2PLC的应用 (4)3.3西门子S7-200CPU226CNDC\DC\D的主要技术指标 (5)4直线自动往返控制 (8)4.110地址分配表 (8)4.2PLC接线图 (8)4.3带注释的程序 (9)5定位控制 (11)5.1I0地址分配表 (11)5.2PLC接线图 (11)5.3带注释的程序 (12)结论 (16)参考文献 (17)1 选题背景及意义传统的运料小车大都是继电器控制,而继电器控制有着接线繁多,故障率高的特点,且维护不易等缺点,作为目前国内控制市场上的哦主流控制器,PLC 在市场,技术,行业影响等方面有着重要的作用,利用PLC控制来代替继电器控制已是大势所趋。
模块二 小车往返运动控制解析
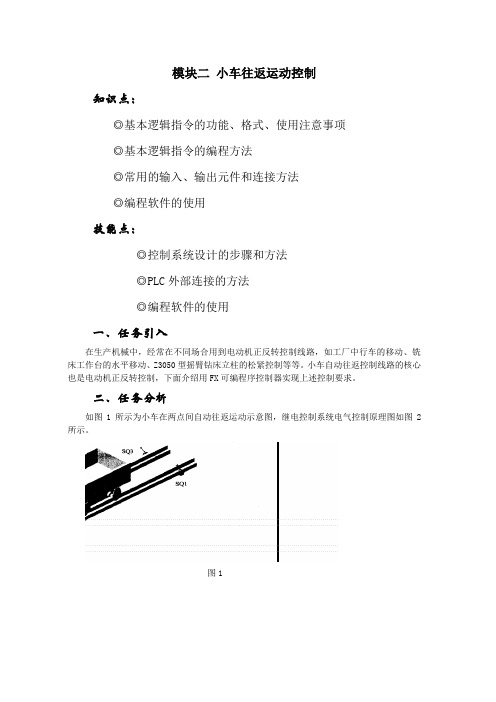
模块二小车往返运动控制知识点:◎基本逻辑指令的功能、格式、使用注意事项◎基本逻辑指令的编程方法◎常用的输入、输出元件和连接方法◎编程软件的使用技能点:◎控制系统设计的步骤和方法◎PLC外部连接的方法◎编程软件的使用一、任务引入在生产机械中,经常在不同场合用到电动机正反转控制线路,如工厂中行车的移动、铣床工作台的水平移动、Z3050型摇臂钻床立柱的松紧控制等等。
小车自动往返控制线路的核心也是电动机正反转控制,下面介绍用FX可编程序控制器实现上述控制要求。
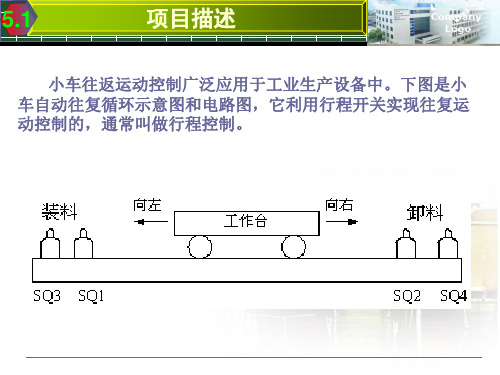
二、任务分析如图1所示为小车在两点间自动往返运动示意图,继电控制系统电气控制原理图如图2所示。
图1图21.元器件功能表元器件功能表见表三、相关知识1.准备知识PLC控制系统由硬件和软件两个部分组成。
硬件部分:将输入元件通过输入点与PLC 连接,将输出元件通过输出点与PLC连接,构成PLC控制系统的硬件系统。
软件部分;控制过程,由PLC程序实现,在编程前我们要先学习下面的基本逻辑指令。
基本逻辑指令表2.控制系统的程序设计(1)I/O分配表见表小车自动往返控制系统地址表(2)梯形图设计对照小车自动往返控制电气原理图画出小车自动往返控制系统梯形图。
(3)指令表编程若要将梯形图语言转换为语句表语言,则需掌握复杂逻辑指令。
(4)PLC控制系统电气原理图QS四、任务实施【实习操作】1.安装和程序设计根据小车自动往返PLC控制系统电气原理图,进行安装元件和布线并进行程序设计。
2.系统调试如果出现故障,应首先检查PLC输入输出线路,硬件检修完成后在修改梯形图,完毕后重新调试,直至系统正常工作。
3.工艺要求熟悉所有电器元件的作用和控制线路的工作原理。
列出I\O分配表,配齐所有电器元件,并检查质量。
绘制元件布置图,经检查合格后,在控制板上安装电器元件。
电器元件安装应牢固,并符合工艺要求。
线路安装应遵循由内向外、横平竖直的原则;尽量做到合理布线、就近走线;编码正确、齐全;接线可靠、不松动、不压皮、不反圈、不损伤线芯。
基于PLC的小车自动往返运动控制系统2
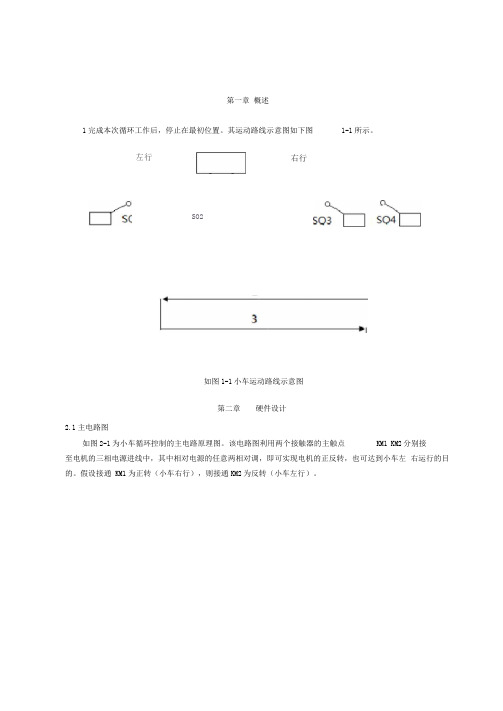
第一章概述1完成本次循环工作后,停止在最初位置。
其运动路线示意图如下图如图1-1小车运动路线示意图2.1主电路图如图2-1为小车循环控制的主电路原理图。
该电路图利用两个接触器的主触点KM1 KM2分别接至电机的三相电源进线中,其中相对电源的任意两相对调,即可实现电机的正反转,也可达到小车左右运行的目的。
假设接通KM1为正转(小车右行),则接通KM2为反转(小车左行)。
左行右行SO21-1所示。
第二章硬件设计图2-1小车循环控制的主电路原理2.2 I/O 地址分配如表2-1为小车循环运动 PLC 控制的I/O 分配表。
在运行过程中,这些 I/O 口分别起到了控制 各阶段的输入和输岀的作用,并且也使小车的控制过程更清晰明了,动作与结果显示更加方便直接。
KM 32.3I/O 接线图如图2-2为小车循环运动PLC控制的I/O接线图。
在进行调试过程时,在PLC模块上,当I0.0有输入信号,即按下SQ1;当I0.1有输入信号,也即按下SQ2以此类推,I/O接线图就是把实际的开关信号变成调试时的输入信号。
同理,输出信号也是利用PLC模块把小车的实际运动用Q0.0、Q0.1的状态表现岀来。
图2-2小车循环运动PLC控制的I/O接线图2.4元件列表如表2-2为小车循环运动PLC控制的元件列表。
在本次设计中就是利用这些元件,用若干导线连接起来组成了我们需要的原理图、I/O接线图。
3.1程序流程图如图3-1为小车循环运动PLC控制的程序流程图。
小车在一个周期内的运动由4段组成。
设小车最初在左端,当按下启动按钮,则小车自动循环地工作,若按下停止按钮,则小车完成本次循环工作后,停止在最初位置。
首先小车位于初始位置,按下SB1启动后,小车向右行驶;当碰到行程开关SQ4小车转向,向左行驶;碰到行程开关SQ2小车再一次转向,向右行驶;碰到行程开关SQ3,小车又向左行驶,直到再次碰到SQ1,然后开始依次循环以上过程。
若不按下停止按钮SB2则小车一直进行循环运动,若此时按下停止按钮SB2小车又碰到行程开关SQ1,则小车回到初始位置。
小车自动往返PLC控制系统程序设计与调试.
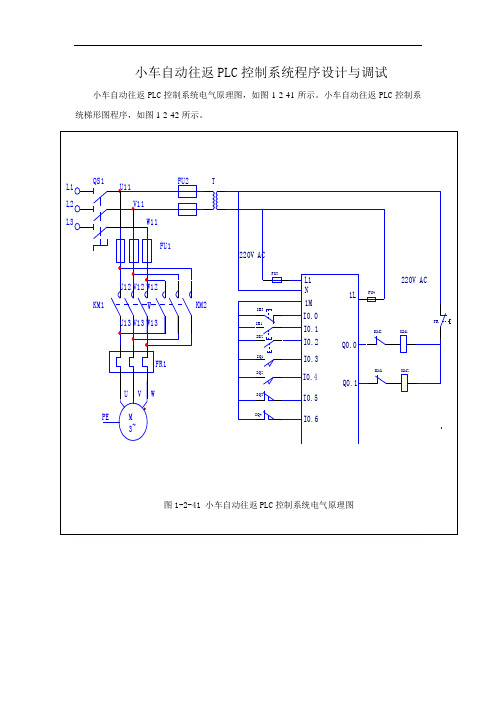
小车自动往返PLC 控制系统程序设计与调试小车自动往返PLC 控制系统电气原理图,如图1-2-41所示。
小车自动往返PLC 控制系统梯形图程序,如图1-2-42所示。
KM1KM2Q0.0Q0.11LFU4220V ACSB2SB3SQ4SQ3SQ2SQ11M L1N FRFU3I0.0I0.1I0.2I0.3I0.4I0.5220V ACFU2FR1KM1FU1M 3~QS1L3L2L1U11V11W11W12V12U12W13V13U13U V WKM2PETKM2KM1SB1I0.6图1-2-41 小车自动往返PLC 控制系统电气原理图2.系统调试(1)在教师现场监护下进行通电调试,将程序写入PLC ,验证系统功能是否符合控制要求。
(2)如果出现故障,学生应独立检修。
线路检修完毕和梯形图修改完毕应重新调试,直至系统正常工作。
3.工艺要求(1)熟悉所用电器元件的作用和控制线路的工作原理。
列出I/O 分配表,配齐所有电器元件,并检查质量。
(2)绘制元件布置图,经教师检查合格后,在控制板上安装电器元件。
电器安装应牢固,并符合工艺要求。
(3)线路安装应遵循由内到外、横平竖直的原则;尽量做到合理布线、就近走线;编码正确、齐全;接线可靠,不松动、不压皮、不反圈、不损伤线芯。
(4)安装完毕进行自检,该过程学生可使用万用表来检查线路。
要求确保无误后才允许通电调试。
图1-2-42 小车自动往返PLC 控制系统梯形图程序。
送料小车自动往返的PLC控制
3
输入输出接口
Company Logo
内部电路
R1
I0.0
5 .6 k S1
D1
Q1
R2
1k
D2
1M
M
DC
L+
2 4v
3
输入输出接口
Company Logo
❖ 3. 热电偶、热电阻扩展模块
❖ 4. PROFIBUS-DP通信模块
5.5 S7-200 PLC内部器件
Company Logo
31
PLC数据类型
2
编址方式
3
寻址方式
4
元件功能及地址分配
31
PLC数据类型
Company Logo
❖ 最基本的存储单位是位(bit),8位二进制数组成1个 字节(Byte),其中的第0位为最低位(LSB),第7位为 最高位(MSB)。两个字节(16位)组成1个字(Word), 两个字(32位)组成1个双字(Double word)。把位、 字节、字和双字占用的连续位数称为长度。
2
PLC基本组成
Company Logo
❖ 可编程控制器主要由CPU、存储器、基本I/O接口电路、 外设接口、编程装置、电源等组成
输入 信号
输
输
入
出
接
CPU
接
口
存储器
口
电
单元
电
路
路
编程装置
输出 设备
2
PLC基本组成
Company Logo
plc小车往返控制系统

摘要可编程序控制器在工业自动化中的地位极为重要,广泛的应用于各个行业。
随着科技的发展,可编程控制器的功能日益完善,加上小型化、价格低、可靠性高,在现代工业中的应用更加突出。
小车的往返自动控制控制采用的可编程制器具有可靠性高、维护方便,用法简单、通用性强等特点,本文用西门子S7-200系列中的CPU226CN可编程控制器控制小车的自动往返控制来说明可编程控制器硬件、软件的设计。
实现工业中运输小车的自动运行问将是保障工业生产平稳、安全、快捷运行的重要环节。
常规继电器小车控制系统与可编程控制器小车控制系统相比都是单一的固定时序控制或者手动控制,不能够根据实际生产状况进行调节控制。
采用西门子S-200系列的可编程序控制器和传感技术来实现对小车的自动运行控制。
可用如下方案来控制小车运行:采用传感器探测小车的即时位置,如在站口的位置设置电磁传感器,当小车经过时就会产生对应电信号,即可检测出小车的通过,并将这一信号作为可编程控制器的控制输入,并用PLC计数,按一定控制规律自动调节小车的左行、右行及停止。
本次设计的实现的功能为,使小车在特定范围内循环运行,循环一定次数之后自动停止,手动实现小车的启动和急停。
本说明书的主要阐述了小车的具体运行规律,并对PLC作了的简单介绍,给出了本次设计的PLC的I/O接口图、外部接线图、以及具体实现功能的程序梯形图及其注释。
关键词:小车循环往返运动PLC CPU226CN目录1 选题背景及意义 (1)1.1选题背景及意义 (1)1.2选题模型介绍 (1)2 系统简介 (2)2.1设计内容 (2)2.2设计思路 (3)3 PLC简介 (5)3.1PLC的定义 (5)3.2PLC的发展 (5)3.3PLC的特点 (5)3.4PLC的基本组成及各部分作用 (6)3.5PLC的应用领域 (9)3.6本次设计采用的PLC (10)4 直线自动往返控制 (11)4.1I/O地址分配 (11)4.2PLC外部接线图 (11)4.3程序梯形图 (12)5 小车定位控制 (14)5.1I/O地址分配 (14)5.2PLC外部接线图 (14)5.3程序梯形图 (15)结论 (17)参考文献 (18)1 选题背景及意义1.1 选题背景及意义可编程控制器是一种为工业机械控制所设计的专用计算机,在各种自动控制系统中有着广泛的应用,它是在继电器控制和计算机控制基础上开发的产品,逐渐发展成为以微处理器为核心,把自动化技术、计算机技术,通信技术融为一体的新型工业自动控制装置。