碰摩转子系统各种图
质量慢变碰摩故障转子系统动力学诊断研究
量慢 变 的转 子 系 统 而言 , 量 的改 变相 当于施 加 在该 质 系 统上 的 质量 不平 衡 作 用 力 发生 变 化 , 以导 致 系统 所
的 动力 学行 为发 生 改变 。 量慢 变 会 引起 该 系统 具有 质
P f : 0
Lk
+ 九 + 1
‰≤0
‰> 0
收 稿 日期 :0 7 I月 20 年 1
( ) ) 列 , +
(<) e6
’
★国家 自然科 学基金 资助项 目( 编号 :0 3 0 0 555 1)
20 2 0 8/
机械制造 4 卷 第 52 6 2 期
维普资讯
征 。
2 2 慢 变 质 量 碰 摩 转 子 系统 动 态 特 性 仿 真 .
( 3 )
式 中 : 碰 摩法 向刚度 ; 为转 静件 间瞬 态 间隙值 ; k为
九+为 第 i 步 迭 代 处 的 I gale乘 子 力 , 以 用 下 +1 J rl a g 可
式表 示 :
不 同于 众 多 恒 定 参 数 转 子 系 统 的 动 力 学 行 为 “ 1 。l于 x- , 质 量 慢 变 的故 障 转 子 系 统 的研 究 比较 少 , 献 [ 】 ̄【 】 文 1 3 研 究 了无 故 障 慢 变 转 子 系 统 的非 线 性 特 性 , 括 其 自激 包
维普资讯
质 量慢 变碰摩故 障转子 系统动 力学诊 断研 究★
口 毛居 全 口 姚红 良 口
沈阳
闻邦椿
10 0 1 04
东北 大 学 机 械 电 子研 究 所
摘
要:建立 了碰摩故 障转子 系统的模型 , 在模 型中考虑 了由于质量变化引起 的冲击 力, 采用数值方 法分析 了故障
裂纹-碰摩耦合故障转子系统时频特性分析

等 高图 , 以诊 断转子 系统的裂纹 一碰摩耦合故障。 可
关键词 : 裂纹
碰摩
起机
小波等高图
文 献 标识 码 : A 文 章 编 号 :0 0—4 9 (0 6 0 —0 3 10 9 82 0 ) 8 0 7—0 3
中 图分 类 号 :K 6 T 27
转 动 轴 的裂 纹 故 障是 旋 转 机 械 的一 种 常 见故 障 , 裂 纹 会 导 致 转 轴 刚 度 降 低 , 而 引 起 转 子 系 统 横 向 振 从
维普资讯
裂纹 一碰摩耦合故障转子系统时频特性分析六
口 宿 苏英 口 姚红 良 口 闻邦 椿
摘 要 :分析 了无 故 障 转 子 系统 、 裂纹 故 障转 子 系统 、 纹 一 摩 故 障 转 子 系统 的起 机 过 程 时 域 特 性 , 结 合 小波 等 裂 碰 并 高 图分 析 其 时域 、 域 特 性 。 论 结 果 显 示 , 纹 一 摩 故 障 转 子 系统 既保 留 了裂 纹 故 障 的 高 频 分 量 特 征 , 保 留 了碰 摩 频 理 裂 碰 又 故 障 的 低 频 成 分特 征 , 速 时 域 曲 线 出现 波动 。 过 实验 验 证 了理 论 结 果 。 究 表 明 , 过 启 机 过 程 的 时 域 波 形 结 合 小 波 升 通 研 通
+( k 2 F【 一靓) O2t y —y) i t : e/) ( l C S +( l 2sn 】 0 2 m +c +k y +k 1 e / ) ( l 2 l ,l 【 一( 3 2 F】 y —y)
i (一 ) f :fe 6j P= c P。 P
在水 平和竖 直 方 向的分力 为 :
( )
故 障 , 致 机 械 设 备 的 进 一 步 损 害 ” 。目前 对 裂 纹 或 碰 导 1 摩 单 一 故 障 转 子 系 统 的 动 态 特 性 和 故 障诊 断 的 研 究 较 多 ¨一1而 对 裂 纹 一碰 摩 耦 合 故 障 的 研 究 多 集 中 于 分 , 析 其 稳 态 过 程 的 动 态 特 性 一1对 启 、 机 过 程 等 非 稳 , 停 态过 程 的研究 较 少 。 于启 、 机过 程在 旋转 机 械运行 鉴 停 过 程 中 的 重 要 性 , 文 分 析 了 裂 纹 一碰 摩 耦 合 故 障 转 本 子 系统 的启 机 时域 、 域 特 性 , 结合 小 波 分析 理 论 , 频 并 对 其 启 机 过 程 动 态 特 性 进 行 分 析 , 果 对 此 类 转 子 系 结 统 的故 障诊 断有 一定参 考 作用 。
转子系统碰摩故障实验研究进展与展望

MA Hu i ,Y A NG J i a n,S O NG R o n g - z e ,NA I Ha i — q i a n g,WE N Ba n g — c h u n
( N o r t h e a s t e r n U n i v e r s i t y ,S c h o o l o f Me c h a n i c a l E n g i n e e r i n g& A u t o m a t i o n ,S h e n y a n g 1 1 0 8 1 9 , C h i n a )
振
动
与
冲
击
第3 3 卷第 6期
J OURNAL OF VI B RA TI ON AND S HOC K
转 子 系统碰 摩 故 障 实验 研 究 进展 与展 望
马 辉, 杨 健, 宋溶泽 , 能海强 , 闻邦椿
1 1 0 8 1 9 )
( 东北 大学 机械工程与 自动化学 院 , 沈阳
l o c l a ub r - i m p a c t i n c o m p l i c a t e d r o t o r s y s t e m,  ̄ ) l o c l a r u b — i m p a c t i n r o t a t i n g b l a d e - c a s i n g , @l o c l a u r b — i m p a c t i n p r a c t i c l a
Ab s t r a c t : Ai mi n g a t t h e r u b — i mp a c t f a u l t b e t we e n r o t o r a n d s t a t o r i n r o t a t i n g ma c h i n e r y,t h e d e v e l o p me n t a b o u t r u b — i mp a c t e x p e i r me n t s wa s s u mma r i z e d .T h e ub r — i mp a c t e x p e ime r n t a l d e v i c e s f o r s i n g l e p o i n t r u b — i mp a c t ,l o c l a ub r — i mp a c t a n d f u l l a n n u l a r r u b — i mp a c t we r e i n t r o d u c e d a n d t y p i c a l e x p e ime r n t a l p h e n o me n a c a u s e d b y t h e s e t h r e e t y p e s o f r u b — i mp a c t s w e r e a n a l y z e d .T h e ma i n r u b — i mp a c t mo d e i n p r a c t i c l a e n g i n e e in r g i s t h e l o c a l ub r — i mp a c t . Ac c o r d i n g t o
双盘悬臂转子轴承系统碰摩故障数值仿真与实验分析
成转静件间隙的局 部 不 均 # 从而导致局部间隙过 小而发生碰摩 # 转子每涡动一周就有机会与静子 发生碰摩一次 # 因此这种碰摩具有周期性特点 # 本 文采用单点碰摩来模拟发生此种碰摩时系统的动
%* 力学特性 ) $
转子系 统 中 转 静 件 的 碰 摩 # 分为法向碰撞与 切向摩擦两种行为 # 在非线性有限元中 # 可以归结 为高度非线性的接 触 问 题 $ 转子系统中转静件碰 摩问题 # 可以看作是两个同心圆柱体的接触问题 # 可以近似地用点对 点 接 触 表 示 $ 其中一个点表示 静子 # 一个点表示转子 # 两个点的距离表示碰摩间 隙# 当两个点的距离小于等于 # 时 # 就表示转静件 发生了碰摩 ( 当两个点的距离大于 # 时 # 表示转静 件脱离碰摩状态 $ 该转子 系 统 基 本 参 数 如 下 & 轴的直径> ) 悬臂 部 分 长 度 5 ) 轴承跨距4 ) ) # # YY# ! # YY# 圆盘直径> 圆盘宽度 9! ! # # YY# # YY# ! )> $ )* 阻尼系数/ 弹性模量 N # YY# a # # !# ) 9$ )! U )# # 泊 松 比 # 材 料 密度0 ) # & > 5 E a ’ )$ 6)#
’ * # 下导 轴 承 刚 度 $ , , a &,! # @ Y# & * ( # ] Y J ! )) * , 下导轴承阻 上导轴承刚度为$ a ’,! # @ Y# $ )" ) 尼 系数2 , 上导轴承阻尼系数2 # @’ T Y# ,! ! )$ $ ( # 并 , # 不平衡偏心量 # @’ a ’ YY TY ; ) (,! L )#
万方数据
+! * $ "+
转子系统动静件间尖锐碰摩时的振动特征试验研究
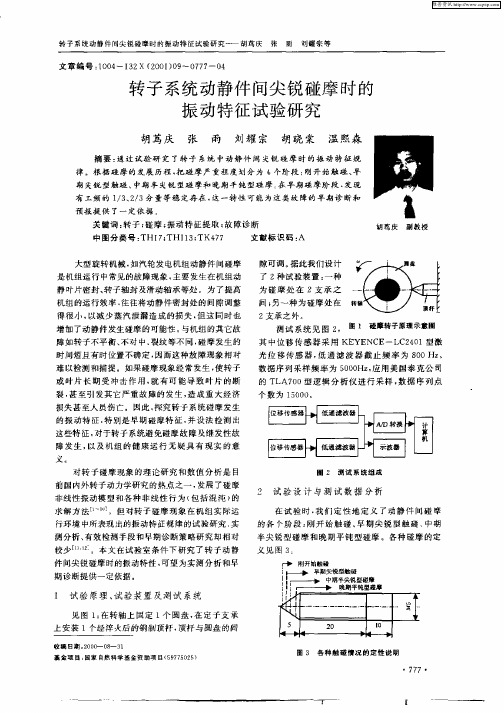
摘 要 : 过 试 验 研 究 了转 子 系 统 中动 静 件 间 尖 锐 硅 摩 时 的 振 动 特 征 规 通
律 。根 据硅摩 的发展 历程 , 碰摩 严重 程度 划分 为 4个阶段 : 把 刚开始 触碰 、 早
期 尖锐 型触碰 、 中期 丰尖锐 型碰 摩 和晚期 平钝 型碰 摩 早期碰 摩阶段 , 在 发现
义 见 图 3 。
r 刚开 蛄触碰 j 卜—— 早 期生锐 型触碰 .
求解 方法
但对转 子 碰摩现象 在机 组实 际运
行环境 中所表现 出的振动特征规律 的试验研究 、 实 测分析 、 有效 检测手段和早期诊断策 略研究却 相对 较少 。 。本文 在试验室 条件 下研 究了转 子 动静 。 件 间尖锐 碰摩时的振动特性 , 可望为实测 分析和早 期诊断提供 一定依据 。
时间短且有时位置不 确定 , 因而这种故 障现象 相对 难以检测和捕捉 。如果碰摩 现象 经常发 生 , 使转 子 或叶 片 长期 受 冲击 作用 , 有 可能 导 致叶 片 的 断 就 裂, 甚至 引发其它 严重故 障 的发生 , 成 重 大经济 造 损失甚 至人 员伤亡 。因此 , 探究 转子系统 碰摩发生
j , 期 碰 l p 晚平型 I i e 钝犀
f
1 试 验原 理 、 验 装置 及 测试 系统 试
见 图 l 在 转 轴 上 固 定 1 圆 盘 , 定 子 支 承 : 个 在
J
J
上安 装 1个经淬火后 的钢 制顶秆 . _ 顶秆 与圆盘 的间
收 稿 日期 :0 0 0- 3 2 0- 8 1 基 金项 目 : 国家 自然 科 学 基金 资 助项 目( 9 70 5 5752 )
转子-滚动轴承耦合系统的转静碰摩故障分析与智能诊断

第1 0期
周 海 仑 等 :转 子 一 动 轴 承 耦 合 系统 的转 静 碰 摩 故 障分 析 与 智 能 诊 断 滚
9 1
与定子 的间 隙时 , 转静 碰 摩 故 障将 产 生 。0 为轴 承 则 几何 中心 , , 0 为转 子 几何 中心 , 0 为转 子 质 心 , 为静
无质 量 弹性 轴 , 子 两 端 采 用对 称 结 构 的滚 动 轴 承 支 转
故障诊 断 中 , 献 [ 、 ] 文 5 6 分别 研 究 了神经 网络 、 持 向 支 量机在 碰摩故 障诊 断 中的应 用 , 是 目前 碰 摩 故 障 的 但 诊断往 往需要 大 量 的故 障样 本 , 而实 际 的碰 摩 故 障 样 本获取并 不容 易 , 因此 , 如何 利用 碰摩故 障动力学 仿 真
=
∑c(cs yn — ・ 。 。 , + sO r ij )
O XC S + y i sn — r 。
子刚度 , 为弹性 轴刚度 , 为转 静 间摩擦 系数 ,, 转 c为
统动力 学模 型 , 并对滚 动 轴承 进行 了详 细建 模 , 考虑 了 滚动轴 承间隙 、 非线性 赫兹接 触及变 柔性 V C振 动等 非 线性 因素 。近 年 来 , 工智 能 已被 广 泛 地 应 用 于 碰 摩 人
转 子- 动轴 承耦合 系 统碰 摩 故 障 动力 学 模 型 , 用 数 滚 运 值 积分方 法研 究 了碰 摩 故 障 特征 , 获 取 了大 量 碰 摩 并
转静 碰摩故 障机理 , 提取 故 障特 征 , 对碰 摩 故 障诊 断具 有重 要意义 。
由于航空 发动机普 遍 采用 滚 动 轴承 , 因此 , 需要 研
究滚动 轴承支 承 下 的转 静 碰摩 故 障 。文 献 [ ] 立 了 2建 轴承一 转子一 定子 多 自由度 系统碰 摩故 障模 型 , 究 了具 研 有局部 碰摩 的滚 动轴 承. 子. 子 系统 的非线 性特 性 , 转 定 但是该模 型滚 动轴 承建 模 过 于简单 ; 文献 [ ] [ ] 3 和 4 建 立 了具 有碰摩 耦 合 故 障 的转 子 一 动 轴 承. 匣耦 合 系 滚 机
转子系统碰摩故障的理论与实验研究
式 中. 、 分别为碰 摩力 在 、, F F l方向 的分 量 ; F 分 F 、
0 前
言
别 为油膜力在 、 方向的分量 。 y
性研摩的 者究均用 ll — 的问“前学研点利线 1【 _ + } 】 理究转混 热题。国 的重是非 论碰目沌 点 内 篓 子 ‘ ._ _ I I
分析结果保持基本一致, 所给出的结论可以作为碰摩转子故障诊断的依据。
关键词 : 碰摩 ; 非线性 ; 混沌 ; 故障诊断
分类号 :H13 T 1 文献标识码 : A 文章 编号 :0 15 8 (07 O -0 70 10 ・8 4 2 0 103 -3 J
T e r i a dE p r e tl eerho u a l o oo ytm h oe c n x ei na R sac nR b F ut f tr s t m R S e
( 空军雷达学院电子对抗 系, 武汉 40 1 ) 30 9
摘要 : 针对发生全周碰摩故 障的转子 一短油膜轴承 系统 , 从数值 仿 真和实验验证两 个方 面研 究 了碰摩转子 的非线 性特征和故障特征 。在理论 上运用 R neK t u g. ut a方法对 运动方程 求取数值解 , 通过周期分 岔图及 轴心轨迹 图研究 其非线性 特征 ; 在实验上通过对转子碰摩模型系统 的实验数据进行频谱分析研 究其故 障特征。数值仿真 和实验 的
维普资讯
第4 9卷 第 1 期
20 0 7年 2月
汽
轮
机
技 术
Vo . 9 No 1 14 . F b. 0 7 e 20
T URB N E HNOL IET C OGY
转子 系统碰摩故 障 的理论与实验研究
滚动轴承-柔性碰摩转子系统非线性动力学响应分析

』 《 【
咖
= s i n q  ̄
( 、 5 J ) ,
假设轴承外圈与外支承之间刚性连接 , 内圈与 转子轴之间刚性连接 , 滚动体等距排列 , 滚动体与
滚道 之 间为纯 滚动 , 含 接触 角 的滚 动球 轴 承 动力 学
则 轴 承 A非线 性滚 动轴 承力 可 以表示 为 :
2 0 1 3 - 0 2 - 2 2 收到第 l 稿, 2 0 1 3 - 0 4 - 0 2 收到修改稿 国家高技术研究 发展计划 项 目 ( 2 0 1 2 A A 0 4 0 1 0 4) 十通讯 作者 E - m a i l :y u a n - h q @1 6 3 . c o m
应, 建立 了滚动轴承 一柔性对称碰 摩转子系统 非线性 集 中质量模 型. 通过数 值计算 与 比较 , 结果表 明 : 低转
速下系续响应主要表现为滚动轴承的变刚度振动 , 高转速下轴承变刚度振动的影响相对减弱, 转子不平衡
和碰摩故 障对系统的影响逐渐增强 , 陀螺效应对高转速下对称转子 的响应不容忽略.
图 1中转 子 系统 两端 由相 同的滚 动轴 承 支 承 , 质量 为分 别 为 m 和 m , 轴承 支反 力在 , Y方 向 的
以上对滚动轴承. 转子系统动力学 的研究 多是 基于深沟球轴承一 刚性转子模型 , 并且忽略 了圆盘 陀螺效应对滚 动轴 承一 转 子系统 非线性 响应 的影
轴承 , 对 系统 的非线 性 振 动 进 行 了数 值 分 析 , 得 到 了转子 系统 的超 谐 波 、 亚谐 波 和 混 沌 运 动 规 律 ; 文
莱截面图和频谱图讨论转速 、 轴承游隙 、 碰摩 刚度
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、激励频率W=900Hz 但静子刚度不同时:
1、kc=7.5e6N/m:
2、kc=2.6e6N/m 时:
位移 x 位移 y
kc=7.5e6N/m 的轴心轨迹图
x
d x /d t
kc=7.5e6N/m 的Poincare 截面图
t
x
kc=7.5e6N/m 的时域图
位移 x 位移 y
kc=2.6e6N/m 的轴心轨迹
图
x
d x /d t
kc=2.6e6N/m 的Poincare 截面图
t
x
kc=2.6e6N/m 的时域图
3、kc=2.9e6N/m 时:
4、kc=3.1e6N/m 时:
位移 x 位移 y
kc=2.9e6N/m 的轴心轨迹图
x
d x /d t
kc=2.9e6N/m 的Poincare 截面图
t
x
kc=2.9e6N/m 的时域图
位移 x 位移 y
kc=3.1e6N/m 的轴心轨迹图
x
d x /d t
kc=3.1e6N/m 的Poincare 截面图
t
x
kc=3.1e6N/m 的时域图
二、静子刚度kc=3.5e6N/m 但激励频率不同时:
1、w=1000rad/s 时:
2、w=1800rad/s 时:
位移 x 位移 y
w=1000rad/s 的轴心轨迹图
x
d x /d t
w=1000rad/s 的Poincare 截面图
t
x
w=1000rad/s 的时域图
位移 x 位移 y
w=1800rad/s 的轴心轨迹图
x
d x /d t
w=1800rad/s 的Poincare 截面图
t
x
w=1800rad/s 的时域图
三、偏心对碰摩转子系统的影响:
1、kc=3.5e6N/m 、w=2300rad/s, b=0.025mm 时:
2、kc=3.5e6N/m 、w=2300rad/s, b=0.03mm 时:
位移 x
位移 y
b=0.025mm 的轴心轨迹图
x
d x /d t
b=0.025mm 的Poincare 截面图
t
x
b=0.025mm 的时域图
位移 x 位移 y
b=0.03mm 的轴心轨迹图
x
d x /d t
b=0.03mm 的Poincare 截面图
t
x
b=0.03mm 的时域图
四、kc=3.5e6、w=2300时不同摩擦系数对碰摩的影响: 1、f=0.1时:
2、f=0.2时:
3、f=0.31时:
位移 x 位移 y
x
d x /d t
t
x
位移 x 位移 y
x
d x /d t
t
x
位移 x 位移 y
x
d x /d t
t
x。