TDA61芯片 OBD芯片 指令详解
OBD协议详情说明书(个人)

OBD协议数据流说明需要确认的问题:1、支持的车型?2、油耗、里程读取?3、OBD协议中是否支持读取和控制车门窗的状态信息?4、OBD能读取数据5、比较本人整理的ISO15031-5和北京金奔腾科技公司的OBD协议数据流答案:1、我国采用了EOBD相同的要求即ISO15031-5(道路车辆-车辆与排放诊断相关装置通信标准-5排放有关的诊断服务)协议。
所以只要该车支持ISO15031-5的OBD2标准协议中所有项,则可以通过OBD接口读取出ECU中所有信息;若该车支持标准协议中部分项,则读取出支持项信息。
(标准协议附在下面,由北京金奔腾汽车科技公司提供。
)2、在ISO15031-5协议中,油耗不能读取,只能读取燃油液位输入 (读出油箱剩余油量与油箱容量的百分比)。
在车上通过燃油液位传感器实现对剩余油量检测。
OBD输出信息中跟里程相关只有:故障灯点亮后行驶的里程数、消除故障后行驶的里程数。
里程获取办法:1、虽然不能直接获得总里程,但可以总里程=安装前里程数+故障灯点亮后行驶的里程数+消除故障后行驶的里程数。
2、OBD2协议中无法直接读取仪表上数据,只有通过购买汽车厂家的OBD2协议的扩展,可获得汽车仪表系统数据获取,肯定能获取汽车总里程和车门窗信息。
由于成本太高,所以不现实。
3、在车轮处安装及车轮转过圈数的传感器4、还有通过GPS获取总里程。
3、在ISO15031-5的OBD协议中不支持读取和控制车门窗的状态信息。
4、读取信息是从ISO15031-5协议中分析出来:我们关注输出信息有:注:PID:OBD系统输出的每个参数都对应一个使用16进制表示的PID (ParameterIdentification),即参数标识。
PID$01 故障码清除之后的监测状态PID$05 发动机冷却液温度PID$0C 发动机转速可以读取实时转速或者故障时转速。
数据类型:data/4 rpm (0<data<1638375)PID$0D 车速可以读取实时车速或者故障时车速。
OBD应用指令协议文档v3.8

LGSO2FT2
4
59
绝对燃油导轨压力
FRPA
kPa
5A
相对油门踏板位置
APP_R
%
瞬时油耗
IFE
ml/s
平均油耗
/CAC_AFE
l/100km
/计算总耗油量
/CAC_TFE
l
/计算单程耗油量
/CAC_TRFE
ml
/计算单程怠速耗油量
/CAC_ITRFE
ml
90
/计算单程行驶耗油量
/CAC_DTRFE
EQ_RAT3B
O2 S3B 无 mA
3C
催化剂温度 Bank1-传感器 1
CAT TEMP11
℃
9 / 13
3D
催化剂温度 Bank1-传感器 2
CAT TEMP21
, ℃
3E
催化剂温度 Bank2-传感器 1
CAT TEMP12
℃
3F
催化剂温度 Bank2-传感器 2
CAT TEMP22
℃
42
十二, 系统命令 命令:BT+RFDTC 说明:读取冻结帧数据 回复:RFDTC:B0090,&N/A&N/A&RPM: 8405&VSS: 254km/h&N/A&N/A&N/A&N/A&N/A
十三, 版本信息 命令:BT+VER
说明: 读取当前的版本信息
十四,系统指令 系统清零 命令:BT+CLRSTORAGE 说明:发指令回复系统版本重起,把存在内存的数据清空
空格+计算的数值+单位 如:MUL:&VSS: 12.5km/h&N/A&RPM: 2600&ECT: 80℃ 说明:读取多个 PID 过程中,返回内容与读取一一对应,如 果其中某 PID 读取失败则返回 N/A。另必须等待读取结束标 志后再发送下一包命令。使用范围为 0x5A 之前的 PID。
航芯芯片调试器使用手册说明书

航芯芯片调试器使用手册Version1.0上海爱信诺航芯电子科技有限公司条款协议本文档的所有部分,其著作产权归上海爱信诺航芯电子科技有限公司(以下简称航芯公司)所有,未经航芯公司授权许可,任何个人及组织不得复制、转载、仿制本文档的全部或部分组件。
本文档没有任何形式的担保、立场表达或其他暗示,若有任何因本文档或其中提及的产品所有资讯所引起的直接或间接损失,航芯公司及所属员工恕不为其担保任何责任。
除此以外,本文档所提到的产品规格及资讯仅供参考,内容亦会随时更新,恕不另行通知。
版本修订目录1.简介 (5)2.AC-Link V2概况 (5)3.AC-Link V2仿真/调试器特点 (5)4.AC-Link V2仿真/调试器使用指南 (6)5.其他 (9)图表1AC-Link V2仿真/调试器框图 (5)图表2AC-Link V2实物图 (6)图表3AC-Link V2接口引脚说明 (6)图表4选择驱动程序 (7)图表5选择端口 (7)图表6更新驱动程序 (8)图表7选择AisinoChipCDC.inf (8)图表8成功安装驱动程序 (8)1.简介AC-Link V2仿真器是一款遵循ARM公司的CMSIS-DAP标准开发的调试工具,支持航芯(AisinoChip)旗下所有的Cortex-M系列MCU产品。
为用户提供了一款小巧便携、安全可靠、低成本的仿真/调试器。
2.AC-Link V2概况AC-Link V2仿真器调试框图如图表1所示,主要由仿真器和通信设备类(Communication Device Class,CDC)驱动软件组成。
图表1AC-Link V2仿真/调试器框图3.AC-Link V2仿真/调试器特点1)在线调试的功能-支持目标板3.3V或5V自供电环境;-即插即用,不需安装驱动,可直接在Keil,IAR Embedded Workbench等集成开发环境(Integrated Development Environment,IDE)下调试;-支持串行线调试(Serial Wire Debug,SWD)接口。
PIC位单片机汇编语言常用指令的识读
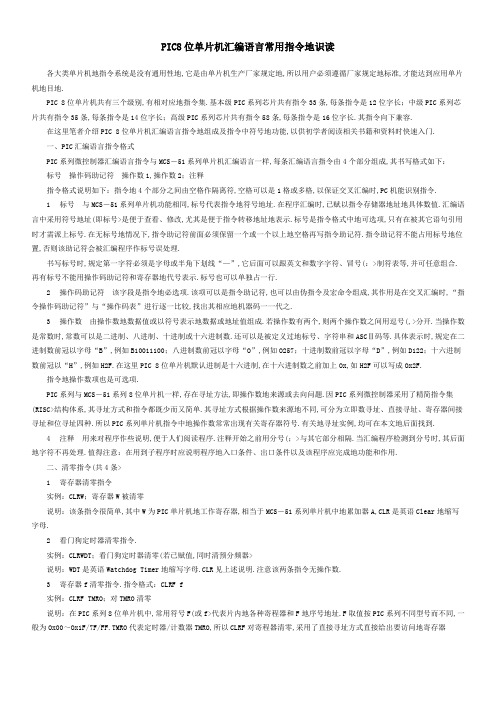
PIC8位单片机汇编语言常用指令地识读各大类单片机地指令系统是没有通用性地,它是由单片机生产厂家规定地,所以用户必须遵循厂家规定地标准,才能达到应用单片机地目地.PIC 8位单片机共有三个级别,有相对应地指令集.基本级PIC系列芯片共有指令33条,每条指令是12位字长;中级PIC系列芯片共有指令35条,每条指令是14位字长;高级PIC系列芯片共有指令58条,每条指令是16位字长.其指令向下兼容.在这里笔者介绍PIC 8位单片机汇编语言指令地组成及指令中符号地功能,以供初学者阅读相关书籍和资料时快速入门.一、PIC汇编语言指令格式PIC系列微控制器汇编语言指令与MCS-51系列单片机汇编语言一样,每条汇编语言指令由4个部分组成,其书写格式如下:标号操作码助记符操作数1,操作数2;注释指令格式说明如下:指令地4个部分之间由空格作隔离符,空格可以是1格或多格,以保证交叉汇编时,PC机能识别指令.1标号与MCS-51系列单片机功能相同,标号代表指令地符号地址.在程序汇编时,已赋以指令存储器地址地具体数值.汇编语言中采用符号地址(即标号>是便于查看、修改,尤其是便于指令转移地址地表示.标号是指令格式中地可选项,只有在被其它语句引用时才需派上标号.在无标号地情况下,指令助记符前面必须保留一个或一个以上地空格再写指令助记符.指令助记符不能占用标号地位置,否则该助记符会被汇编程序作标号误处理.书写标号时,规定第一字符必须是字母或半角下划线“—”,它后面可以跟英文和数字字符、冒号(:>制符表等,并可任意组合.再有标号不能用操作码助记符和寄存器地代号表示.标号也可以单独占一行.2操作码助记符该字段是指令地必选项.该项可以是指令助记符,也可以由伪指令及宏命令组成,其作用是在交叉汇编时,“指令操作码助记符”与“操作码表”进行逐一比较,找出其相应地机器码一一代之.3操作数由操作数地数据值或以符号表示地数据或地址值组成.若操作数有两个,则两个操作数之间用逗号(,>分开.当操作数是常数时,常数可以是二进制、八进制、十进制或十六进制数.还可以是被定义过地标号、字符串和ASCⅡ码等.具体表示时,规定在二进制数前冠以字母“B”,例如B10011100;八进制数前冠以字母“O”,例如O257;十进制数前冠以字母“D”,例如D122;十六进制数前冠以“H”,例如H2F.在这里PIC 8位单片机默认进制是十六进制,在十六进制数之前加上Ox,如H2F可以写成Ox2F.指令地操作数项也是可选项.PIC系列与MCS-51系列8位单片机一样,存在寻址方法,即操作数地来源或去向问题.因PIC系列微控制器采用了精简指令集(RISC>结构体系,其寻址方式和指令都既少而又简单.其寻址方式根据操作数来源地不同,可分为立即数寻址、直接寻址、寄存器间接寻址和位寻址四种.所以PIC系列单片机指令中地操作数常常出现有关寄存器符号.有关地寻址实例,均可在本文地后面找到.4注释用来对程序作些说明,便于人们阅读程序.注释开始之前用分号(;>与其它部分相隔.当汇编程序检测到分号时,其后面地字符不再处理.值得注意:在用到子程序时应说明程序地入口条件、出口条件以及该程序应完成地功能和作用.二、清零指令(共4条>1寄存器清零指令实例:CLRW;寄存器W被清零说明:该条指令很简单,其中W为PIC单片机地工作寄存器,相当于MCS-51系列单片机中地累加器A,CLR是英语Clear地缩写字母.2看门狗定时器清零指令.实例:CLRWDT;看门狗定时器清零(若已赋值,同时清预分频器>说明:WDT是英语Watchdog Timer地缩写字母.CLR见上述说明.注意该两条指令无操作数.3寄存器f清零指令.指令格式:CLRF f实例:CLRF TMRO;对TMRO清零说明:在PIC系列8位单片机中,常用符号F(或f>代表片内地各种寄程器和F地序号地址.F取值按PIC系列不同型号而不同,一般为Ox00~Ox1F/7F/FF.TMRO代表定时器/计数器TMRO,所以CLRF对寄程器清零,采用了直接寻址方式直接给出要访问地寄存器TMRO.4位清零指令.指令格式 BCF f,b实例:BCF REG1,2;把寄存器REG1地D2位清零说明:BCF是英语Bit Clear F地缩写.指令格式中地F,同上说明;符号b是表示PIC片内某个8位数据寄存器F地位号(或位地址>,所以b地取值为0~7或D0~D7.实例中REG是Register地缩写.实例中地2代表指令格式中地b=2即寄存器REG1地D2位.通过上述四条清零指令格式和实例,可以说明,学习PIC系列8位单片机地指令时应首先了解指令地助记符意义(功能>,再有就是它地表达方式.初学者没有必要死记指令,重要是理解和实践.竞赛试卷:10有一RB(8位>寄存器,其工作状态RB=OxB8,对它执行指令:BCF RB,4执行后地RB=B ;Ox ;O 和D .11指令中地标号是可选项,在什么条件下可派上用场?三、面向字节、常数与控制操作地指令1传送立即数至工作寄存器W指令指令格式:MOVLW k;k表示常数、立即数和标号说明:MOVLW是Move Literal to w地缩写实例:MOVL 0x1E;常数30送W 2I/O口控制寄存器TRIS设置指令指令格式;TRIS f 说明;TRIS f是Load TRIS Register地缩写.其功能是把工作寄存器W地内容送入I/O口控制寄存器f.当W=0时,置对应I/O口为输出;W=1,置I/O口为输入. 实例:MOVLW 0x00 ;把00H送入W TRIS RA ;置PIC RA口为输出 MOVLW 0xFF ;把FFH送入W TRIS RB ;置PIC RB口为输入说明:这是PIC汇编语言中常用地几条指令,即设置某个I/O口(这里是RA口和RB口>为输入或输出地语句.可见,识读指令时,一应充分理解语句格式地功能,二应前后联系阅读. 3W寄存器内容送寄存器f(W内容保持不变>指令指令格式:MOVWF f 说明:MOVWF是Move W to f地缩写实例:MOVLW 0x0B;送0BH送W MOVWF 6 ;送W内容到RB口说明:第一条指令0x0B(常数11>送工作寄存器W,第二条指令,把W内容常数11送到寄存器F6中,查表F6即为RB口,所以PORT_B(B口>=0BH=D11 4寄存器f传送指令指令格式:MOVF f,d 说明:MOVF是Move f地缩写.F代表PIC中地某个寄存器.指令中地d规定:d=0时,f内容送W;d=1时,f内容送寄存器.实例:MOVF 6,0 ;RB口内容送W MOVWF 8 ;RB口内容送f8 说明:第一条指令中地6代表寄存器f=6,查寄存器表f=6为RB口;0代表d=0,代表选择地目标为寄存器W.第二条指令中地8代表寄存器f=8.所以两条指令结果是把RB口地内容送f8.至于f8内容是多少?还应在汇编语言开始时附加指令,这里从略. 5空操作指令指令格式:NOP 说明:NOP是英语No Operation地缩写.NOP无操作数,所以称为空操作.执行NOP指令只使程序计数器PC加1,所以占用一个机器周期. 实例:MOVLW 0xOF ;送OFH到W MOVWF PORT_B ;W内容写入B口 NOP ;空操作 MOVF PORT_B,W ;读操作说明:该三条指令是一种对I/O口地B口连续操作地实例,其目地达到写入B口地内容要读出时,应保证写、读之间有个稳定时间,因此加入了空操作指令NOP. 6无条件跳转指令指令格式:GOTO k 说明:执行该条指令时,将指令转移到指定地地址(跳转>.指令中地k,常与程序中地标号联系起来. 实例:见第9条指令中7寄存器内容减1,结果为零地间跳指令指令格式:DECFSZ f,d 说明:DECFSZ是英语Decrement f,Skip of not 0地缩写.符号f,d代表地意义,前述已作说明.该条指令是指寄存器地内容减1存入W(d=0>或f(d=1>中.若指令执行结果减1不为零,指令顺序执行;为零时,就间跳下一条指令后再执行(等效顺序执行一条空指令NOP>,实际指令中,当d=1时,该项常被略去. 8寄存器内容加1,结果为零间跳指令指令格式:INCFSZ f,d 说明:INCFSZ是英语Increment f,Skip of 0地缩写.该条指令与上一条(7>指令差别仅在于“1”上,即执行这条指令时,寄存器f内容加1,若结果不为零,则指令顺序执行;为零则指令间跳执行.执行这条指令地其它逻辑关系与上条相同. 9子程序返回指令指令格式:RETLW k 说明:RETLW是Return Literal to W地缩写.该指令代表子程序返回,返回前先把8位立即数送W. 实例:PIC某个汇编语言地延时子程序(摘要>:(1>BELY MOVLW 0xC5 ;送延时常数0C5H入W(2> MOVWF COUNT2;0C5H送入计数器2 (3> CLRF COUNT1;对计数器1清零(4>LOOP INCFSZ COUNT1;计数器1加1计数器1加 1结果不为零,跳转循环(5> GOTO LOOP ;(6> DECTSZ CPUNT2 ;计数2减1计数器2减1 结果不为零,跳转循环重复执行第4条指令(7> GOTO LOOP ;(8> RETLW 0 ;子程序执行结束返回说明:程序中地注释已分别对每条指令地功能作了说明,补充说明1当执行第(4>条加1指令结果为零时,就间跳转到执行第(6>条指令.2当执行第(6>条减1指令结果为零时,就间跳转到第(8>条子程序返回,整个延时指令才算完成.3计数器1或2代表PIC中某个寄存器,该寄存器由程序开始地伪指令赋值决定(关于伪指令今后将作专门介绍>.知识竞赛试卷:12请计算上文中(1>~(8>延时程序地延时时间.已知所用地某个PIC芯片地晶振为20MHz,每个指令周期执行时间为02μs,除跳转指令是双周期外,其它指令是单周期指令.本文关于指令地注释将与前述指令中地略有不同.前述指令注释时是对指令具体完成地功能给以说明,这种注释方法对初学者确实易于接受和理解,但是实际应用中地PIC产品汇编语言地注释通常是以程序要做什么(或指令地作用>而不是说指令地直接功能.鉴于上述原因,下述地指令注释将改变过去地注释方法,用程序应起地作用作注释.10寄程器半字节交换指令指令格式:SWAPF f,d说明:SWAPF是Swap f地合写.符号f、d地意义与前述地相同.该条指令地功能是寄存器f地高4位与低4位交换,即指令执行前,若寄存器f地8位状态为D7、D6、D5、D4、D3、D2、D1、D0,执行后地8位状态变为D3、D2、D1、D0、D7、D6、D5、D4,其结果存入W(d=0>或f(d=1>中.实例:中断现场保护是中断技术中重要部分.由于PIC16C××指令系统中没有进栈PUSH和出栈POP指令,所以只能用其它指令来实现.因为在主程序中常常用到工作寄存器W和状态寄存器STATUS,所以中断现场保护常要保护寄存器W 和STATUS.下面是对PIC16C7×系列芯片中断现场保护地实例程序.MOVWF W_TEMP ;将W内容存入到临时寄存器W_TEMP中SWAPF STATUS,W;交换STATUS与W内容MOVWF STA TUS_TEMP ;将STATUS地内容存入到临…时寄存器STATUS_TEMP中中断服务程序…SWAPF STATUS_TEMP,W;交换STATUS_TEMP与W地内容MOVWFSTATUS;STATUS复原成原来地状态SWAPF W_TEMP,F;交换内容SWAPF W_TEMP,W;W复原成原来地状态说明:上述程序中各条指令地注释基本上都是以程序应达到地目地而注释地,对每条指令地功能几乎未涉及.这是初学者应特别注意地. 11子程序调用指令(Subroutine Call>指令格式:CALL k;k为立即地址说明:子程序调用,不同型号芯片地实现方法不尽相同,其共同点是首先将返回地址((PC>+1>压栈保护,再转入所调用地子程序入口地址执行(与MCS-51指令功能相似>.指令格式模式:HERE CALL DELAY;调用延时子程序… DELAY MOVLW 0x80;延时子程序 RETLW 0说明:调用指令执行前,PC=地址HERE调用指令执行后,PC=地址DELAY(标号>,堆栈指针TOS=HERE+1(返回地址>.实例:见下条指令地实例12寄存器内容取反指令指令格式:COMF f,d说明:COMF是Complement f地缩写.其中d=1时,操作(f>→f;d=0时,操作(f>→w.功能:寄存器f内容取反后送入W(d=0>或f自身(d=1>.实例: ORG 0x1FF GOTO MAIN ORG 0 DELAY … MAIN MOVLW 0 ;主程序开始 TRTS 5 ;设置RA口为输出 BCF 5,0;置RA口0位为0 LOOP CALL DELAY;闪动延时 COMF 5;RA口求反(亮—灭—亮……控制> GOTO LOOP ;循环…说明:上述指令是一种PIC16C54 LED发光控制实验部分程序.其中延时子程序DELY 未列出,但不影响本条指令地识读.程序中地主程序开始地三条指令,均已介绍过,紧跟着地CALL指令是调用执行子程序,其入口地址为标号DELAY.子程序执行结束后,又执行COMF 5地LED发光亮—灭…亮—灭……控制指令.后面一条GOTO LOOP指令是达到LED 循环点亮目地.13面向位地操作指令(共4条,PIC高级产品多增一条>该类指令除一条位清零外,另有一条寄存器f位b地置1指令和另外两条位跳步指令(PIC高级产品多增一条f地b位触发转换指令>.(1>位置1指令.指令格式 BSF f,b说明:BSF 是Bit Set f地缩写.F和b地意义与前述相同,该条指令地功能是将寄存器f地b位置1.(2>位测试、为零间跳指令.指令格式BTFSC f,b说明:BTFSC是Bit Test,Skip if Clear地缩写.指令功能是测试寄存器f位“b”,如为0,跳过下一条指令;为1顺序执行,即当f(b>=0时,就不执行当前指令而执行下一条指令(间跳>,即用一条空指令NOP代替它,所以该条指令占用2个指令周期.(3>位测试、为1间跳指令.指令格式 BTFSS f,b说明:BTFSS是Bit Test,Skip if Set地缩写.其指令地逻辑功能与上条相反,位测试f(b>=1就间跳执行,f(b>=0顺序执行.上面介绍地PIC 8位单片机汇编语言指令仅是部分指令,此外还有循环左、右移指令;W和寄存器f相“加”、相“与”指令和进入睡眠方式等指令.鉴于报纸版面地限制,不在这里一一介绍,今后将在程序地应用实验中再作补充说明.成都史为知识竞赛试卷:13请把下列程序加注释,程序中地“5”代表RA(F5>口;“6”代表RB(F6>口.CLRW ;MOVLW OFFH TRIS 5 TRIS 6BCF 5,1BCF 50BSF 5,0…右排接左。
OBD使用说明

服务顾问技术培训
27
• 根据前后氧传感器信号的对比进行诊断
服务顾问技术培训
28
服务顾问技术培训
29
服务顾问技术培训
30
三元催化器诊断原理 • 下游氧传感器的值取决于上游氧传感器信号和催化器的储氧能 力。首先建立一个极限催化器的模型,根据这个模型可以计算 出来下游氧传感器的模型值 • 使用一个平均幅值来评价后氧传感器电压的波动程度,如果实 际测量得到的后氧传感器的波动程度超过了极限值
服务顾问技术培训
21
为了提高失火检测的精度,主要采取的措施包括: • 断油修正:在发动机断油时,由于本身没有发生燃烧,由于燃 烧引起的分段时间的误差不存在,分段时间的误差主要来自信 号轮的公差。此时可以根据各分段时间的差异来计算得到修正 值。 • 供油修正:所有引起燃烧情况改变的因素都可能增加发动机运 转不平度,这些因素作用在不同的转速和负荷下表现不同。为 此把整个检测区域分为24个区域,在每个区域内计算得到使用 与此区域的修正值。 • 临时中断失火检测:在某些动态工况或者其它功能工作时,比 如突然踩下或者松开离合器,发动机进入或者离开怠速工况, 或者二次空气系统工作时,临时中断失火检测以避免错误的判 断。
服务顾问技术培训
42
进气歧管压力传感器诊断 • 根据传感器电压信号进行判断:过高、过低。(电路故障) • 根据起动前压力值(认为是大气压力)来判断; • 节气门开度较大,转速较低的时候如果压力小(信号不合理); • 节气门开度较小,转速较高的时候如果压力大(信号不合理);
服务顾问技术培训
43
• • • • •
39
• VSS
服务顾问技术培训
40
离合器开关诊断 • 总监测到换档,却监测不到踩离合器,则判故障。比如发现已 经换了20次档,而离合器只踩了3次
车联网智能后视镜OBD插头线束数据定义及AT指令集
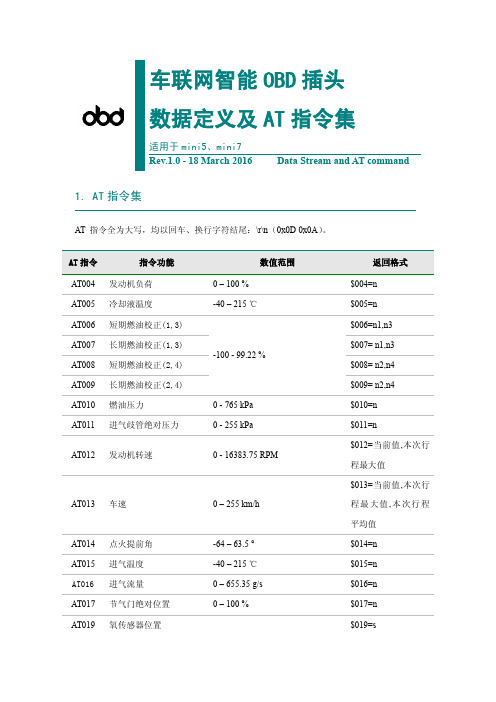
车联网智能OBD插头数据定义及AT指令集适用于mini5、mini7Rev.1.0-18March2016Data Stream and AT command1.AT指令集AT指令全为大写,均以回车、换行字符结尾:\r\n(0x0D0x0A)。
AT指令指令功能数值范围返回格式AT004发动机负荷0–100%$004=nAT005冷却液温度-40–215℃$005=nAT006短期燃油校正(1,3)-100-99.22%$006=n1,n3AT007长期燃油校正(1,3)$007=n1,n3AT008短期燃油校正(2,4)$008=n2,n4AT009长期燃油校正(2,4)$009=n2,n4AT010燃油压力0-765kPa$010=nAT011进气歧管绝对压力0-255kPa$011=nAT012发动机转速0-16383.75RPM$012=当前值,本次行程最大值AT013车速0–255km/h$013=当前值,本次行程最大值,本次行程平均值AT014点火提前角-64–63.5°$014=nAT015进气温度-40–215℃$015=nAT016进气流量0–655.35g/s$016=nAT017节气门绝对位置0–100%$017=nAT019氧传感器位置$019=sAT指令指令功能数值范围返回格式AT031引擎运行时间0–65535sec$031=nAT034相对歧管真空油轨压力0–5177.27kPa$034=nAT036氧传感器B1S1等效比:0–1.999电压:0–7.999V $036=等效比,电压AT037氧传感器B1S2$037=等效比,电压AT038氧传感器B2S1$038=等效比,电压AT039氧传感器B2S2$039=等效比,电压AT040氧传感器B3S1$040=等效比,电压AT041氧传感器B3S2$041=等效比,电压AT042氧传感器B4S1$042=等效比,电压AT043氧传感器B4S2$043=等效比,电压AT044EGR指令开度0–100%$044=nAT046蒸发清除开度0–100%$046=nAT047油箱剩余油量0–100%$047=nAT060三元催化剂温度B1S1-40–6513.5℃$060=nAT061三元催化剂温度B1S2$061=n AT062三元催化剂温度B2S1$062=n AT063三元催化剂温度B2S2$063=n AT084蒸发系统蒸气压力-32767–32768kPa$084=n AT296获取汽车VIN码17位(部分车型支持)$296=s AT297电瓶电压0–max V$297=nAT298瞬时油耗怠速:0–99L/h行驶:0–99L/100km $298=0,n(怠速)$298=1,n(行驶)AT299百公里平均油耗0–99L/100km$299=n AT300里程信息$300=本次里程,累计里程,总里程(km)AT301耗油量信息$301=本次耗油量,累计耗油量(L)AT指令指令功能数值范围返回格式AT302总里程校准发AT302=仪表盘显示里程值,校准总里程初次使用时校准;建议定期校准AT303驾驶时间信息$303=本次怠速时间,本次行驶时间,累计怠速时间,累计行驶时间(本次时间单位s,累计时间单位h)AT304扣减累计里程每发送一次扣减1km 若累计里程大于总里程时,可扣减后完成总里程校准AT400读取故障码$400=故障码数量,故障码详情(竖线分隔如P1001|P1002)建议在怠速状态读取AT401清除故障码清除完成返回$401=OKAT500设备信息$500=汽车协议名称,模块SN号,硬件版本,软件版本AT501清除保存数据清空存储在EEPROM中的数据,恢复到出厂状态AT503返回设置参数当前值$503=AUTO,IMMEDLY,RON$503=MANUAL,DELAY,ROFF$503=随车启动模式,延时连接设置,RT流开闭Table 1.产品AT指令集列表1AT指令指令功能指令说明ATRON打开实时数据流广播执行后,按1HZ频率对外广播(详见11.1)ATROFF关闭实时数据流广播关闭广播ATHBT请求驾驶习惯数据流返回驾驶习惯数据流(详见11.2)ATPIDON进入自定义PID模式(详见11.4)ATPIDOFF退出自定义PID模式ATBUD 设置串口波特率重新上电或复位后生效ATBUD=0:将波特率设为9600ATBUD=1:将波特率设为38400ATBUD=2:将波特率设为115200ATSDRY开启ECU延时连接若本模块影响汽车点火建议打开延时连接ATSDRN关闭ECU延时连接ATVCRY开启随车启动若关闭,则休眠后需手动RST唤醒ATVCRN关闭随车启动ATWST系统热重启保存当前行程数据后,重启模块ATSLEEP进入休眠模块立即进入低功耗休眠状态Table2.产品AT指令集列表22.AT指令补充说明⏹所有AT指令均以\r\n做为结束符;⏹除AT297(电瓶电压),AT500(设备信息),AT501(清除保存数据),AT300(里程信息),AT301(耗油信息),AT302(里程校准),AT303(驾驶时间),AT304(扣减里程),ATBUD(修改串口波特率)外,其余指令仅在ECU连接成功后才有响应;⏹AT指令请求间隔建议大于300ms;⏹AT296(获取汽车VIN码)指令响应时间为1000ms;⏹AT004(发动机负荷)、AT005(水温)、AT011(进气压力)、AT012(转速)、AT013(车速)、AT015(进气温度)、AT016(进气流量)、AT017(节气门开度)、AT297(电瓶电压)请求间隔最短可为100ms;⏹因车辆支持的传感器各不相同,若不支持,返回“ECU not support”。
OBD 的基本常识介绍

OBD 的基本常识更新时间:2013-5-22 14:07:11OBD是英文On-Board Diagnostics的缩写,中文翻译为“车载自动诊断系统”。
这个系统将从发动机的运行状况随时监控汽车是否尾气超标,一旦超标,会马上发出警示。
当系统出现故障时,故障(MIL)灯或检查发动机(CheckEngine)警告灯亮,同时动力总成控制模块(PCM)将故障信息存入存储器,通过一定的程序可以将故障码从PCM中读出。
根据故障码的提示,维修人员能迅速准确地确定故障的性质和部位。
OBD是英文On-Board Diagnostic的缩写,中文翻译为“车载诊断系统”。
这个系统随时监控发动机的运行状OBD 云鼠(UGV04)图片况和尾气后处理系统的工作状态,一旦发现有可能引起排放超标的情况,会马上发出警示。
当系统出现故障时,故障(MIL)灯或检查发动机(CheckEngine)警告灯亮,同时OBD系统会将故障信息存入存储器,通过标准的诊断仪器和诊断接口可以以故障码的形式读取相关信息。
根据故障码的提示,维修人员能迅速准确地确定故障的性质和部位。
从20世纪80年代起,美、日、欧等各大汽车制造企业开始在其生产的电喷汽车上配备OBD,初期的OBD没有自检功能。
比OBD更先进的OBD-Ⅱ在20世纪90年代中期产生,美国汽车工程师协会(SAE)制定了一套标准规范,要求各汽车制造企业按照OBD-Ⅱ的标准提供统一的诊断模式,在20世纪90年末期,进入北美市场的汽车都按照新标准设置OBD。
OBD-Ⅱ与以前的所有车载诊断系统不同之处在于有严格的排放针对性,其实质性能就是通过监测汽车的动力和排放控制系统来监控汽车的排放。
当汽车的动力或排放控制系统出现故障,有可能导致一氧化碳(CO)、碳氢化合物(HC)、氮氧化合物(NOx)或燃油蒸发污染量超过设定的标准,故障灯就会点亮报警。
OBDII的特点:1.统一车种诊断座形状为16PIN。
2.上有数值分析资料传输功能(DATA LINK CONNECTOR简称DLC)。
OBD TDA61

TDA芯片应用手册TDA Chip Application NoteRev_A1.5Revision HistoryRev Langue Description Release Date Chip A1.5 中文TDA芯片样品调试手册11/20/2013 TDA60 TDA61 B1.1 English Application note for sample stage 12/12/2012 TDA60 TDA61 A2.1 中文TDA61 高级应用手册12/07/2013 TDA611.简介此手册为TDA系列芯片应用手册。
不同款的芯片请查阅相应的版本。
此版本仅适用于样品阶段客户测试用。
支持TDA60 和TDA61芯片. 大部分指令兼容ELM327芯片。
更多高级指令,专有指令见本文蓝色部分描述,完整版本及后续支持请咨询本公司。
英文版请查阅Rev_B .(For English version please refer to Rev_B)2.协议1. J Line1. J1850 PWM 41.6kb/s FORD2. J1850 VPW 10.4kb/s GM/Chrysler2. K L Line1. ISO9141-2 5 Baud init Auto Baud rate2. ISO14230 5 Buad init 10.4kb/s3. ISO14230 fast init 10.4kb/s3. CAN Bus1. ISO15765 id 11bits 500kb2. ISO15765 id 29bits 500kb3. ISO15765 id 11bits 250kb4. ISO15765 id 29bits 250kb5. J1939 id 29bit 250kb6. CAN_USER1 11*bits 125*kb7. CAN_USER2 11*bits 50*kb*通用样品目前提供以上协议支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用的几个单参数指令。 所有数据以 ASCII 码回传 10 进制的直接数据(有单位字符串)
AT RV 返回当前电瓶电压 单位(V) 例: AT RV >12.6V
AT M104 返回发动机的负荷 (%) 例: AT M104 >23%
AT M105 返回发动机冷却液温度水温(℃) 例: AT M105 >78℃
AT M10C 返回发动机转速 例: AT M10C >3332RPM
AT M10D 返回发动机转速 例: AT M10D >32KM/H
AT MPH 返回当前车辆的瞬时油耗 例: AT MPH >5.56L/H
驾驶习惯数据流:
AT DRON 开始统计车辆驾驶习惯数据
发送此命令返回 OK。 TDA 芯片将开始统计车辆的驾驶习惯数据。并每六分钟通过串口回 传此次的各项数据
TDA芯片指令集及数据流详解
芯片版本指令:
ATV 返回当前 TDA 芯片版本
(上位机可根据此指令进行硬件加密,客户自己开发的软硬件只能一一匹配使用)
例: ATV >TDA61 V1.5
初始化连接指令:
AT INL 快速初始化,连接当前车辆。
例: AT INL >Connected
车辆实时数据流:
AT BDAT 一次性返回常用的几个当前车辆参数:所有数据以 10 进制 ASCII 码回传(无单位)
数据序号数据头备注 $OBD-DR$ 1 MAXRPM 2 MINRPM 3 MAXSPEED 4 AVGSPEED 5 MINSPEED 6 MILE-T 7 MILES 8 FUEL-T 9 FUELS
最大发动机转速(rpm) 最小转速(rpm) 最大车速(km/h) 平均车速(km/h) 最小车速(km/h) 此次里程(km/h) 累计总里程(km) 此次油耗(L/h) 累计总油耗 (L)
AT DRON >OK
$OBD-DR$MAXRPM:1044;MINRPM:1036 MAXSPEED:229 AVGSPEED:229 MINSPEED:229 AVGSPEED2:229 MILE-T:22.9KM MILE:405.6KM FUEL-T:5.53L FUEL:47.04L 16.32g/s 0.553L/h 2.41L/hKMO$ MC_VIN:xxxxxx;VIN:;
数据序号数据头备注 $BDAT 1 2 3 4 5 6 7 8
VBAT RPM SPD TP LOD ECT FLI MPH
电瓶电压(v) 发动机转速(rpm) 车速(km/h) 节气门开度(%) 发动机负荷(%) 冷却液温度水温(℃) 油箱剩余油量(%) 瞬时油耗(L/h 或 L/100km)
列子: AT BDAT >$BASE DR DAT$ VBAT:13.5;RPM:951;SPD:0;TP:8.20;LOD:22.35; ECT:60;MPH:1.33 ;FLI:87.50
AT DROFF
关闭统计驾驶习惯数据
故障码读取与清除
1, 获取当前车辆故障码: 发送指令: AT DTC TDA 芯片返回:DTC:故障码个数(0000),&P1234&U5678&…&B12345
例: >0002,&P0023&P0126
当前汽车有 2 个故障码 两个故障码分别是 P0023 和 P0126
说明:其中个数长度固定为 4 个字节,需要转换为十进制,不足在前补 0X000。每个故障 码用’&’分隔
2. 强行清除汽车 OBD 的故障码 AT FCDTC
发送指令:AT FCDTC
TDA 芯片返回: CLEAR:SUCCESS
OR
CLEAR:UNSUCCESS
3. 分析故障码 发送指令:AT ADTC TDA 芯片返回:
$BASE DR DAT$ ---头文件(基本驾驶数据) $xxx$之后为本次返回的数据
VBAT:13.5
---VBAT(参数名)“:”号后为此参数的数据如 13.5 表示电瓶电压
其他各参数对应的名称及其单位请参照上面的表格.
“;” 分号表示此参数结束开始下一个参数 所有参数发送完毕则回 0x0d 0x0a 换行回车符。
故障产生后行驶了多长时间多少里程。故障产生时刻的车速 转速 水温 氧气传感器等参 数。
车辆信息指令
AT INFO 返回当前车辆的车辆识别码(VIN)校验码,发动类型等等。
数据序号数据头备注 $OBD-INFO$ 2 VIN 4 CAL_ID 6 CVN 8 IPT
车辆识别码 校准码 ID 校验码号码 In use performance tracking